Предлагаемое изобретение относится к резервированным рулевым приводам, предназначенным для применения в высоконадежных системах автоматического управления, например в системах управления полетом летательного аппарата.
Известны гидромеханические приводы, работающие от двух независимых гидросистем, содержащие двухкамерные гидродвигатели тандемного типа и дублированные золотниковые цилиндрические распределители, имеющие основные и дублирующие золотники (см. патент РФ № 2179940, 7 В64С 13/00).
Наиболее близким по технической сущности является комбинированный привод, содержащий корпус с каналами, двухкамерный гидродвигатель тандемного типа, электрогидравлический усилитель мощности, рулевую машину, подпружиненный стопор, два дублированных золотниковых распределителя, состоящие каждый из основного золотника, кинематически связанного с входной качалкой управления и соосно расположенного внутри дублирующего золотника, и другие элементы (патент РФ № 2243421, 7 F15B 9/03).
Известны достоинства указанного привода, главным из которых является возможность работы в режиме комбинированного управления: механогидравлическое управление с одновременной коррекцией от рулевой машины автопилота по электрическим сигналам системы автоматического управления.
Привод имеет тот недостаток, что в режиме комбинированного управления возможна работа лишь от одной из гидросистем, в случае отказа которой работа от оставшейся гидросистемы возможна только в режиме гидромеханического управления.
Указанный недостаток обусловлен тем, что в указанном приводе отсутствует ряд конструктивных устройств и элементов, их исполнение и расположение относительно друг друга, что не позволяет исключить указанные недостатки, значительно снижающие надежность в работе системы управления летательного аппарата.
Технической задачей заявляемого изобретения является устранение указанного недостатка, т.е обеспечение возможности работы в режиме комбинированного управления как от двух гидросистем, так и от любой из двух независимых гидросистем.
Поставленная задача решается тем, что в заявляемом двухкамерном комбинированном приводе содержится двухкамерный гидродвигатель тандемного типа, два блока управления, имеющих однотипную конструкцию, каждый из которых содержит корпус с каналами, соединенными с линиями нагнетания и слива одной из двух независимых гидросистем объекта, дублированный золотниковый распределитель, состоящий из основного золотника, соосно расположенного внутри дублирующего золотника, электрогидравлический усилитель мощности, рулевую машину с датчиком обратной связи, подпружиненный стопор, клапан кольцевания, электрогидравлические клапаны включения режима комбинированного управления и стопорения основного золотника, при этом основные золотники и шток рулевой машины каждого блока управления кинематически связаны между собой и с входным и выходным звеньями гидродвигателя таким образом, что позволяют осуществить коррекцию управления по двум электрическим каналам системы автоматического управления при совместной работе обеих гидросистем и по одному электрическому каналу при отказе любой из гидросистем, т.е. при отказе любой из гидросистем сохраняется возможность работы в режиме комбинированного управления при этом необходимые соотношения плеч кинематической проводки управления подобраны таким образом, что диапазоны управления от системы автоматического управления при совместной работе двух гидросистем и при работе от одной любой гидросистемы относятся как 2:1.
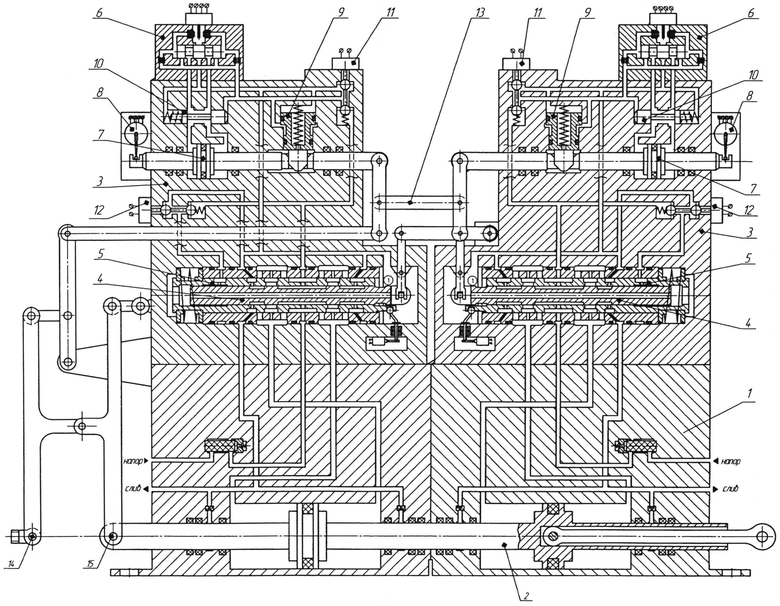
Сущность предлагаемого изобретения поясняется чертежом, где представлена его общая схема.
Двухкамерный комбинированный привод содержит корпус 1 с двухкамерным гидродвигателем тандемного типа 2, два однотипных блока управления, каждый из которых содержит корпус 3 с каналами, соединенными с линиями нагнетания и слива одной из двух независимых гидросистем объекта, дублированный золотниковый распределитель, состоящий из основного золотника 4, соосно расположенного внутри дублирующего золотника 5, электрогидравлический усилитель мощности 6, рулевую машину 7 с датчиком обратной связи 8, подпружиненный стопор 9, клапан кольцевания 10, электрогидравлические клапаны включения режима комбинированного управления 11 и стопорения основного золотника 12. Основной золотник 4 и шток рулевой машины 7 каждого блока управления системой качалок и тяг 13 связаны между собой и с входным звеном 14 и выходным звеном 15 привода.
Работа привода в режиме механогидравлического управления аналогична работе известных гидромеханических приводов.
Переход на режим комбинированного управления осуществляется подачей электропитания в электрогидравлический клапан 11 рулевой машины.
В рулевой машине рабочая жидкость поступает:
- в электрогидравлический усилитель 6;
- в стопор 9, который освобождает шток рулевой машины;
- в клапан кольцевания 10, который разъединяет рабочие полости гидроцилиндра рулевой машины;
Электрический сигнал управления преобразуется электрогидравлическим усилителем 6 в гидравлический поток, приводящий в движение шток рулевой машины с выдачей датчиком обратной связи 8 сигнала обратной связи, пропорционального положению штока. Под действием сигнала обратной связи, поступающего в систему автоматического управления, происходит уменьшение электрического сигнала управления до нуля и движение штока рулевой машины прекращается. Перемещение штока рулевой машины суммируется с перемещением входного звена привода с выдачей в золотниковые гидрораспределители сигнала рассогласования, который преобразуется в перемещение выходного звена привода.
При выключенном режиме комбинированного управления любой из гидросистем перемещение штока работающей рулевой машины суммируется с перемещением входного звена относительно неподвижного штока неработающей рулевой машины.
При включенном режиме комбинированного управления обеих гидросистем происходит сложение перемещений работающих штоков рулевых машин и их суммирование с перемещением входного звена, тем самым увеличивается в два раза диапазон управления от электрических сигналов системы автоматического управления.
Переход с комбинированного управления на механогидравлическое управление осуществляется снятием гидропитания рулевой машины путем обесточивания электрогидравлического клапана 11. При этом клапан кольцевания соединяет рабочие полости гидроцилиндра рулевой машины, стопор 9 возвращает поршень гидроцилиндра рулевой машины в среднее положение и стопорит его в этом положении.
В случае отказа одной из гидросистем привод продолжает работу от оставшейся гидросистемы с сохранением технических характеристик, кроме развиваемого усилия, которое уменьшается вдвое, в том числе сохраняется возможность работы в режиме комбинированного управления с уменьшением диапазона управления от системы автоматического управления в два раза, тем самым повышается надежность работы привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКАМЕРНЫЙ КОМБИНИРОВАННЫЙ ПРИВОД | 2003 |
|
RU2243421C2 |
| КОМБИНИРОВАННЫЙ ПРИВОД | 2007 |
|
RU2337856C1 |
| КОМБИНИРОВАННЫЙ ПРИВОД | 2003 |
|
RU2245462C1 |
| КОМБИНИРОВАННЫЙ ПРИВОД | 2002 |
|
RU2235661C2 |
| Блок комбинированных гидроприводов | 2018 |
|
RU2685115C1 |
| КОМБИНИРОВАННЫЙ ПРИВОД | 2001 |
|
RU2190783C1 |
| ЭЛЕКТРОГИДРОМЕХАНИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2191138C2 |
| КОМБИНИРОВАННЫЙ ПРИВОД | 2000 |
|
RU2194886C2 |
| МНОГОКАНАЛЬНЫЙ РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2005 |
|
RU2305800C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2019 |
|
RU2714958C1 |
Привод предназначен для применения в системах управления летательных аппаратов. Привод содержит двухкамерный гидродвигатель тандемного типа, два блока управления, имеющих однотипную конструкцию, каждый из которых содержит корпус с каналами, соединенными с линиями нагнетания и слива одной из двух независимых гидросистем объекта, дублированный золотниковый распределитель, состоящий из основного золотника, соосно расположенного внутри дублирующего золотника, электрогидравлический усилитель мощности, рулевую машину с датчиком обратной связи, подпружиненный стопор, клапан кольцевания, электрогидравлические клапаны включения режима комбинированного управления и стопорения основного золотника, при этом основные золотники и шток рулевой машины каждого блока управления кинематически связаны между собой и с входным и выходным звеньями гидродвигателя таким образом, что позволяет осуществлять коррекцию управления по двум электрическим каналам системы автоматического управления при совместной работе обеих гидросистем и по одному электрическому каналу при отказе любой из гидросистем. Технический результат - повышение надежности управления. 1 з.п. ф-лы, 1 ил.
1. Двухкамерный комбинированный привод, содержащий двухкамерный гидродвигатель тандемного типа, два блока управления, имеющих однотипную конструкцию, каждый из которых содержит корпус с каналами, соединенными с линиями нагнетания и слива одной из двух независимых гидросистем объекта, дублированный золотниковый распределитель, состоящий из основного золотника, соосно расположенного внутри дублирующего золотника, электрогидравлический усилитель мощности, рулевую машину с датчиком обратной связи, подпружиненный стопор, клапан кольцевания, электрогидравлические клапаны включения режима комбинированного управления и стопорения основного золотника, отличающийся тем, что основные золотники и шток рулевой машины каждого блока управления кинематически связаны между собой и с входным и выходным звеньями гидродвигателя таким образом, что позволяет осуществить коррекцию управления по двум электрическим каналам системы автоматического управления при совместной работе обеих гидросистем и по одному электрическому каналу при отказе любой из гидросистем, т.е. при отказе любой из гидросистем сохраняется возможность работы в режиме комбинированного управления.
2. Привод по п.1, отличающийся тем, что необходимые соотношения плеч рычагов кинематической проводки управления подобраны таким образом, что диапазоны управления от системы автоматического управления при совместной работе двух гидросистем и при работе от одной любой гидросистемы относятся как 2:1.
| ДВУХКАМЕРНЫЙ КОМБИНИРОВАННЫЙ ПРИВОД | 2003 |
|
RU2243421C2 |
| КОМБИНИРОВАННЫЙ ПРИВОД | 2000 |
|
RU2194886C2 |
| ДВУХКАМЕРНЫЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2179940C2 |
| ОПТИЧЕСКИЙ МНОГОСЛОЙНЫЙ ПОЛОСНО-ПРОПУСКАЮЩИЙ ФИЛЬТР | 2013 |
|
RU2538078C1 |
| US 4074527 A, 21.02.1978 | |||

