Изобретение относится к следящим электрогидромеханическим приводам, нашедшим широкое применение в качестве исполнительных механизмов в системах управления летательных аппаратов.
Наиболее близким по технической сущности является рулевой агрегат РА-60А, содержащий головку (корпус) с линиями нагнетания и слива, силовой цилиндр с исполнительным штоком, качалки, распределительный золотник, клапаны включения и кольцевания, стопор штока рулевой машины, рулевую машину, электрогидравлический усилитель, датчики обратной связи и др. (см. книгу И. С. Дмитриев, С.Ю. Есаулов "Системы управления одновинтовых вертолетов", М.: Машиностроение, 1969, стр. 142, рис. 4.10).
Известны достоинства данного агрегата, основным из которых является возможность увеличения его диапазона работы путем автоматического перемещения элементов системы управления летательного аппарата от сигналов автопилота.
Однако существенными недостатками данного агрегата являются увеличенные габаритные размеры вследствие сложности кинематики механической проводки управления, увеличенная зона нечувствительности вследствие дополнительных люфтов в шарнирных соединениях штока рулевой машины с гидравлическим распределителем при автоматическом режиме управления, а также потеря управляемости в случае заклинки механической проводки, связывающей ручку управления летательного аппарата с входной качалкой агрегата.
Технической задачей предлагаемого изобретения является устранение указанных недостатков, а именно, сохранение управляемости привода при заклинке механической проводки управления летательного аппарата, исключение дополнительных кинематических связей между штоком рулевой машины и гидравлическим распределителем, приводящих к уменьшению зоны нечувствительности при работе от электросигналов, а также уменьшение габаритных размеров за счет упрощения кинематического механизма.
Поставленная задача решается тем, что в заявляемом электрогидромеханическом приводе, содержащем корпус с линиями нагнетания и слива, силовой цилиндр с исполнительным штоком и датчиками обратной связи, гидравлический распределитель, гидравлический стопор, входную качалку, кинематически связанную с исполнительным штоком, гидравлическим стопором и гидравлическим распределителем, электрогидравлический усилитель, клапан кольцевания, электрогидравлические клапаны, клапан переключения систем с микропереключателем, рулевую машину со штоком, с центрирующей пружиной и датчиками обратной связи, гидравлический распределитель выполнен в виде двух цилиндрических золотников, соосно расположенных один внутри другого, причем внутренний золотник кинематически связан с входной качалкой, а наружный жестко связан со штоком рулевой машины, а входная качалка состоит из двух шарнирно соединенных рычагов, имеющих возможность взаимного перемещения и связанных между собой посредством механического фиксатора, выполненного в виде двух подпружиненных плунжеров, расположенных внутри одного из рычагов, кинематически связанного с внутренним золотником гидравлического распределителя и гидравлическим стопором, и имеющих конические поверхности, контактирующие с соответствующими отверстиями другого рычага, соединяющегося с механической проводкой управления летательного аппарата.
При этом, в случае заклинки механической проводки управления летательного аппарата, гидравлический стопор при включении электрогидравлического клапана, преодолевая усилие пружины, выводит плунжеры фиксатора из зацепления с ответными отверстиями, устанавливает кинематически связанный с ним внутренний золотник гидравлического распределителя в среднее положение и, размыкая таким образом механическую обратную связь, переводит привод в режим автоматического управления.
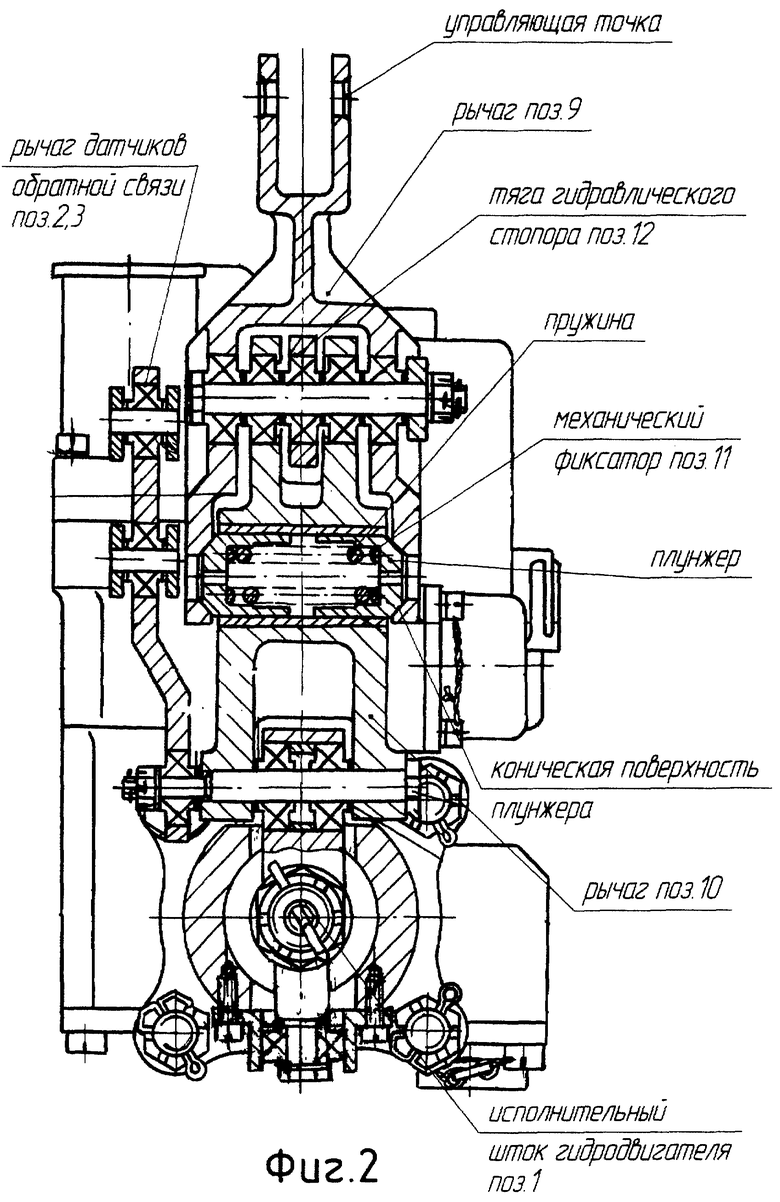
Сущность предлагаемого изобретения поясняется на фиг. 1, где представлена общая схема привода; на Фиг.2 - конструкция входной качалки.
Электрогидромеханический привод содержит силовой цилиндр с исполнительным штоком 1 и датчиками обратной связи 2, 3, клапаны кольцевания силового цилиндра 4, 5, гидравлические фильтры 6, 7, гидравлический распределитель 8, состоящий из двух соосно расположенных один внутри другого цилиндрических золотников, входную качалку, состоящую из двух шарнирно соединенных рычагов 9, 10, связанных между собой механическим фиксатором 11, причем рычаг 9 соединяется с механической проводкой управления летательным аппаратом, а рычаг 10 кинематически соединен с гидравлическим стопором 12, срабатывающим по сигналу электрогидравлического клапана 13, и внутренним золотником гидравлического распределителя 8, клапан переключения систем 14 с микропереключателем и сигнальной лампочкой 15, электрогидравлический клапан 16 включения комбинированного режима управления, электрогидравлический усилитель 17, клапан кольцевания полостей рулевой машины 18, датчики обратной связи 19, 20, рулевую машину со штоком 21 и центрирующей пружиной 22, при этом шток 21 жестко связан с наружным золотником гидравлического распределителя 8. Все указанные составные элементы привода размещены в корпусе 23 с линиями нагнетания и слива.
Электрогидромеханический привод предназначен для работы в системе управления летательного аппарата в четырех режимах:
- режим механогидравлического управления;
- режим комбинированного управления (механогидравлическое управление с одновременной коррекцией от электросигналов пилотажно-навигационного комплекса);
- режим автоматического управления;
- режим аварийного автоматического управления в случае заклинки механической проводки управления летательного аппарата.
При работе привода в механогидравлическом режиме электрогидравлические клапаны выключены, шток рулевой машины 21 и жестко связанный с ним наружный золотник гидравлического распределителя 8 неподвижны и удерживаются в среднем положении усилием центрирующей пружины 22, а тяга, соединяющая входную качалку с гидравлическим стопором 12, может свободно перемещаться. Рабочая жидкость под давлением поступает через фильтры 6, 7 к средним проточкам гидравлического распределителя 8. Буртики внутреннего золотника перекрывают нагнетание в полости и слив из полостей силового цилиндра. Исполнительный шток неподвижен и удерживает нагрузку.
При перемещении управляющей точки внутренний золотник гидравлического распределителя 8 перемещается внутри наружного золотника и соединяет соответствующие полости силового цилиндра с нагнетанием и сливом систем. Исполнительный шток под действием возникающего перепада давлений начинает перемещаться и через систему качалок возвращает внутренний золотник гидравлического распределителя 8 в нейтральное положение.
При работе в режиме комбинированного управления после включения электрогидравлического клапана 16 давление нагнетания первой системы через клапан переключения 14 поступает в электрогидравлический усилитель 17 и под торец клапана кольцевания полостей рулевой машины 18. После подачи управляющего электрического сигнала в электрогидравлический усилитель 17 соответствующие полости гидродвигателя рулевой машины соединяются с нагнетанием и сливом. Под действием возникающего перепада давлений шток рулевой машины 21 начинает перемещаться, а в датчиках 19, 20 формируется сигнал обратной связи.
При этом наружный золотник гидравлического распределителя 8, жестко связанный со штоком рулевой машины, перемещается относительно внутреннего золотника и соединяет полости силового цилиндра 1 с нагнетанием и сливом гидросистем. Исполнительный шток силового цилиндра под воздействием возникающего перепада давлений начинает перемещаться и через систему качалок перемещает внутренний золотник гидравлического распределителя 8, который своими буртиками перекрывает нагнетание и слив из полостей силового цилиндра.
В случае отказа первой системы срабатывает клапан переключения 14, при этом контакты микропереключателя замыкаются и загорается сигнальная лампочка 15. В этом случае работа привода осуществляется от второй системы.
При работе привода в автоматическом режиме включается электрогидравлический клапан 13, давление нагнетания поступает в гидравлический стопор 12, который через кинематическую связь устанавливает внутренний золотник гидравлического распределителя 8 в среднее положение и таким образом размыкает механическую обратную связь исполнительного штока силового цилиндра 1. При этом работа рулевой машины осуществляется так же, как и в режиме комбинированного управления, а обратная связь исполнительного штока силового цилиндра 1 реализуется за счет электрических сигналов, формируемых в индукционных датчиках 2, 3, кинематически связанных с исполнительным штоком.
В случае заклинки механической проводки управления летательного аппарата, а соответственно и рычага 9 входной качалки, соединенного с механической проводкой управления, после включения электрогидравлического клапана 13 давление нагнетания поступает в гидравлический стопор 12, который за счет развиваемого усилия, преодолевая усилие механического фиксатора 11, выводит конические поверхности подпружиненных плунжеров фиксатора из зацепления с соответствующими отверстиями рычага 10 входной качалки и через кинематическую связь привода устанавливает внутренний золотник гидравлического распределителя в среднее положение. Таким образом, привод переводится в режим автоматического аварийного управления, принцип которого описан выше.
Конструкция входной качалки с механическим фиксатором представлена на фиг.2.
Многочисленные исследования приводов, выполненных по представленной схеме, подтвердили их преимущество по сравнению с известными приводами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2001 |
|
RU2207300C2 |
| КОМБИНИРОВАННЫЙ ПРИВОД | 2007 |
|
RU2337856C1 |
| КОМБИНИРОВАННЫЙ ПРИВОД | 2003 |
|
RU2245462C1 |
| КОМБИНИРОВАННЫЙ АГРЕГАТ УПРАВЛЕНИЯ | 2012 |
|
RU2532634C2 |
| ДВУХКАМЕРНЫЙ КОМБИНИРОВАННЫЙ ПРИВОД | 2003 |
|
RU2243421C2 |
| ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД | 2003 |
|
RU2238220C2 |
| КОМБИНИРОВАННЫЙ ПРИВОД | 2000 |
|
RU2194886C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ | 2000 |
|
RU2191297C2 |
| КОМБИНИРОВАННЫЙ ПРИВОД | 2001 |
|
RU2190783C1 |
| КОМБИНИРОВАННЫЙ ПРИВОД | 2002 |
|
RU2235661C2 |
Изобретение относится к следящим исполнительным механизмам и предназначено для использования в качестве исполнительного органа в системах управления пилотируемыми летательными аппаратами. Гидравлический распределитель (8) в приводе выполнен в виде двух цилиндрических золотников, соосно расположенных один внутри другого, причем наружный жестко связан со штоком (21) рулевой машины, а внутренний золотник соединен с входной качалкой, которая для обеспечения аварийного автоматического управления в случае заклинки механической проводки управления летательного аппарата выполнена из двух шарнирно соединенных рычагов (9, 10), имеющих возможность взаимного перемещения и связанных между собой посредством механического фиксатора (11), выполненного в виде двух подпружиненных плунжеров, расположенных внутри рычага (10), связанного с внутренним золотником гидрораспределителя (8). Упрощена конструкция и уменьшены габаритные размеры привода. 1 з.п.ф-лы, 2 ил.
Электрогидромеханический привод по п.1, отличающийся тем, что входная качалка состоит из двух шарнирно соединенных рычагов, имеющих возможность взаимного перемещения и связанных между собой посредством механического фиксатора, выполненного в виде двух подпружиненных плунжеров, расположенных внутри одного из рычагов, кинематически связанного с внутренним золотником гидравлического распределителя и гидравлическим стопором, и имеющих конические поверхности, контактирующие с соответствующими отверстиями другого рычага, соединяющегося с механической проводкой управления летательного аппарата.
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1989 |
|
SU1601907A1 |
| ТРЕХКАНАЛЬНАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ РУЛЕВАЯ МАШИНА | 1977 |
|
SU1826414A1 |
| Гидроусилитель для системы управления самолетами (вертолетами) | 1962 |
|
SU199676A1 |

