Изобретение относится к гироскопическому приборостроению и может быть использовано для измерения углов в системах управления.
Известен твердотельный волновой гироскоп [1], содержащий резонатор в виде осесимметричного тонкостенного элемента, способного к вибрации по меньшей мере на одной из множества мод стоячих волн, по меньшей мере один электрод резонатора, закрепленный на внешней или внутренней поверхности резонатора, по меньшей мере один электрод, закрепленный на торцевой поверхности резонатора, корпус, на котором закреплены резонатор, множество электродов датчиков и электродов управления. Электронный блок управления содержит источники опорных переменных токов высокой частоты, раздельные дифференциальные усилители-сумматоры сигналов с емкостных преобразователей перемещений по собственным осям, устройства детектирования и фильтрации низких частот для выделения сигналов колебаний резонатора. Сигналы колебаний резонатора снимаются с емкостных преобразователей перемещений, образованных электродами датчиков и электродами, закрепленными на торцевой поверхности резонатора.
Недостатком приведенной конструкции является то, что раздельное выделение сигналов колебаний резонатора по собственным осям приводит к появлению погрешности определения положения колебательной картины из-за неидентичности коэффициентов передачи амплитуд сигналов, связанной с различными величинами дрейфов по отдельным каналам преобразования.
Этот недостаток устранен в вибрационном датчике вращения с мультиплексной электроникой [2], который содержит резонатор в виде осесимметричного тонкостенного элемента, по меньшей мере один электрод, закрепленный на поверхности резонатора и подключенный к сенсорному электронному блоку, входной порт которого соединен с выходным портом резонатора и предназначен для определения из сигнала на выходном порту резонатора параметров по меньшей мере одной стоячей волны, возникающей при вибрации резонатора, корпус, к которому прикреплены резонатор и восемь электродов, подключенных к задающему электронному блоку. На электроды корпуса подаются высокочастотные возбуждающие напряжения и управляющие напряжения. Сигналы колебаний резонатора получаются в результате раздельной мультиплексной обработки сигнала, снимаемого с электрода резонатора.
В вибрационном датчике вращения с мультиплексной электроникой, который является наиболее близким по конструкции, способу считывания и управления к предлагаемому изобретению, при сложении сигналов на электроде резонатора из-за взаимного влияния сигналов по различным собственным осям колебаний резонатора происходит снижение точности измерений, а также снижение динамического диапазона работы прибора при последовательной мультиплексной подаче управляющих напряжений.
Предлагаемым изобретением решается задача повышения точности и надежности твердотельных волновых гироскопов. Для получения указанного технического результата представлен твердотельный волновой гироскоп, содержащий резонатор в виде осесимметричного тонкостенного элемента, способного к вибрации по меньшей мере на одной из множества мод стоячих волн, по меньшей мере один электрод резонатора, закрепленный на поверхности резонатора, корпус, на котором закреплены резонатор и множество электродов корпуса, находящихся в непосредственной близости к одному или более электродам резонатора, электронный блок управления, содержащий устройства стабилизации амплитуды колебаний, подавления квадратурных колебаний, вычисления угла, входной блок, соединенный с электродом резонатора, задающий блок, соединенный с электродами корпуса и электродом резонатора, электродами корпуса и электродом резонатора образованны емкостные преобразователи перемещений, задающий блок предназначен для подачи на электрод резонатора опорного напряжения, включающего составляющие высокой частоты, и на электроды корпуса сигналов управления, включающих нулевой потенциал для работы емкостных преобразователей перемещений.
Для первого варианта конструкции твердотельного волнового гироскопа входной блок содержит усилитель, перемножитель-демодулятор, на который подается опорное напряжение, фильтр низких частот, устройства хранения данных, сигнал на которые записывается синхронно с подачей нулевого потенциала на электроды по соответствующим осям резонатора, дифференциальные усилители для суммирования выходных сигналов и устройства формирования выходных сигналов по собственным осям колебаний резонатора.
Для второго варианта конструкции твердотельного волнового гироскопа входной блок содержит усилитель, два устройства хранения данных, запись в которые осуществляется только при подаче нулевого потенциала сигналов управления на электроды по соответствующим осям резонатора синхронно с составляющими высокой частоты, входящими в опорное напряжение, подаваемое на электрод резонатора, дифференциальный усилитель, аналого-цифровой преобразователь и цифровой процессор обработки сигналов для выделения из полученных массивов данных параметров колебаний резонатора по собственным осям.
Отличительными признаками в заявляемой конструкции твердотельного волнового гироскопа является то, что:
- сигналы колебаний резонатора снимаются с емкостных преобразователей перемещения [3], образованных электродом резонатора и электродами корпуса, в режиме считывания сигналов на электрод резонатора подается опорное напряжение высокой частоты, не влияющее существенно на динамику резонатора, на электроды корпуса подается нулевой потенциал, работа преобразователей на высокочастотном переменном токе позволяет избежать появления составляющих ухода, вызванных постоянными токами утечки, и повысить точность измерения положения колебательной картины;
- сигналы колебаний резонатора проходят через один общий тракт усиления, детектирования и фильтрации для первого варианта конструкции и через единственный общий тракт усиления, хранения, дифференциального суммирования и аналого-цифрового преобразования для второго варианта конструкции, что повышает точность измерения положения колебательной картины;
- одновременная подача сигналов управления при нулевом потенциале на электроде резонатора обеспечивает увеличение динамического диапазона работы прибора.
Сущность изобретения поясняется чертежами, представленными на фиг.1-5.
Фиг.1 показывает общий вид конструкции твердотельного волнового гироскопа с металлизированной внутренней полусферической поверхностью резонатора, электродами корпуса, закрепленными на внешней полусферической поверхности нижнего основания корпуса.
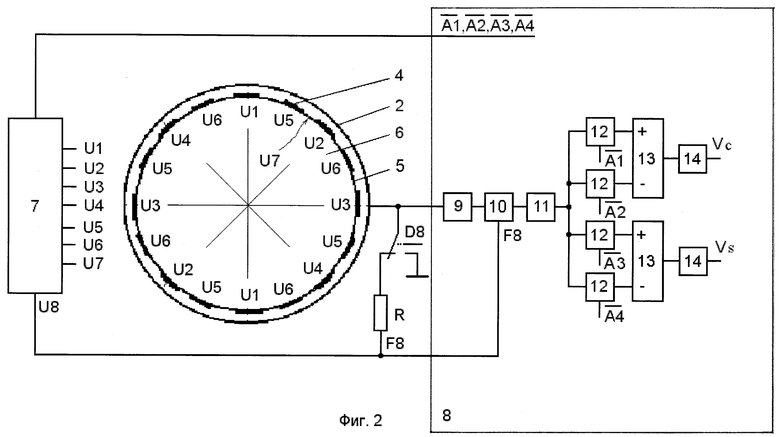
Фиг. 2 показывает функциональную схему включения задающего и входного блоков электронного блока управления для первого варианта конструкции твердотельного волнового гироскопа.
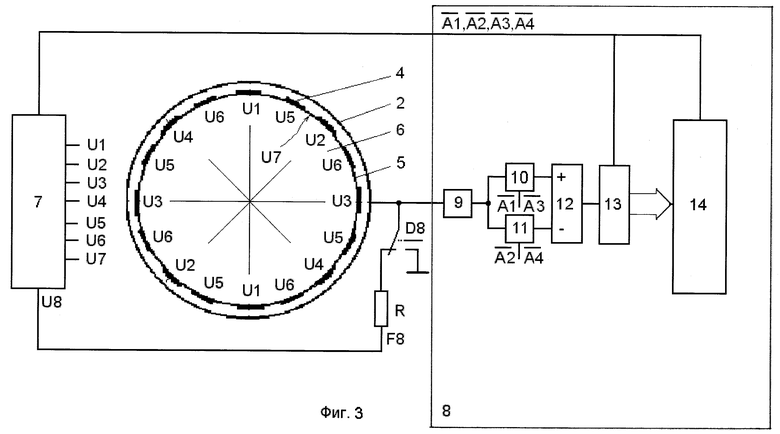
Фиг. 3 показывает функциональную схему включения задающего и входного блоков электронного блока управления для второго варианта конструкции твердотельного волнового гироскопа.
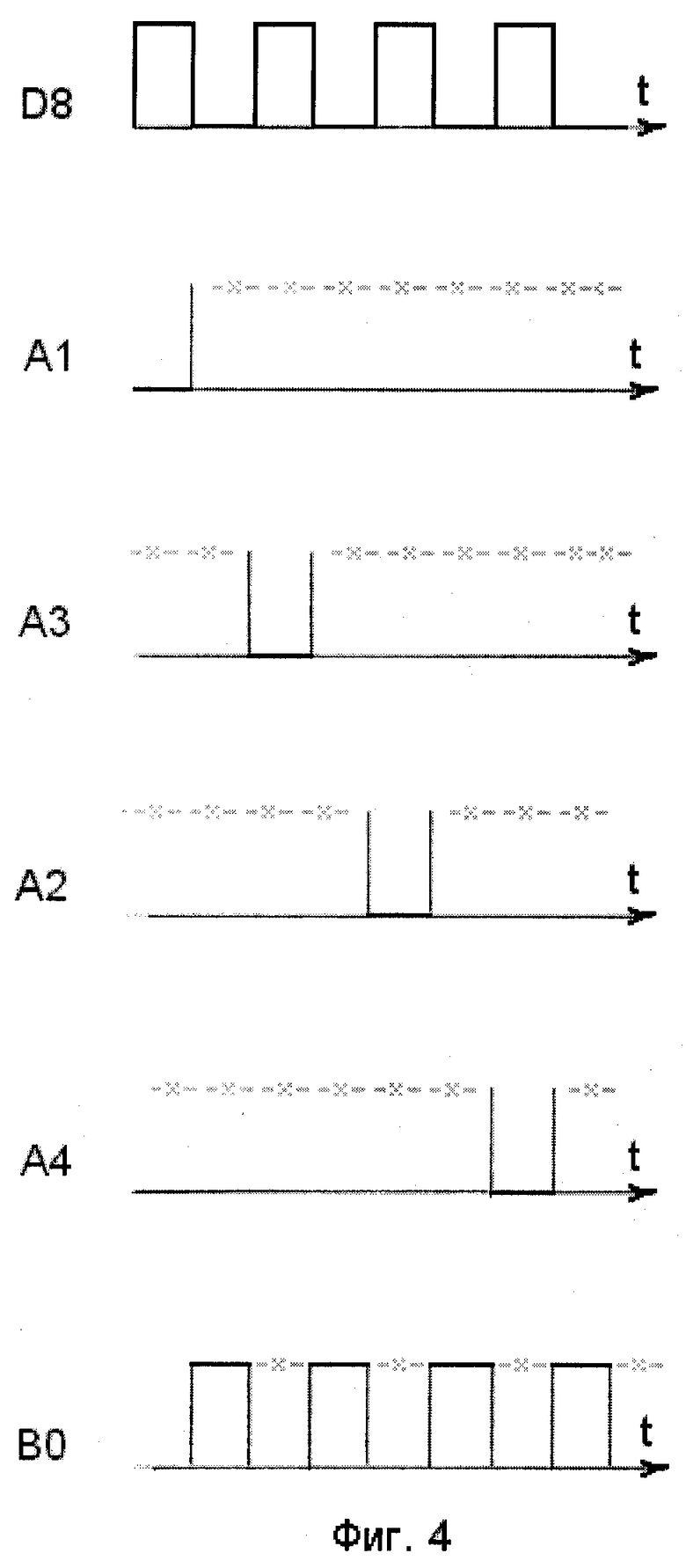
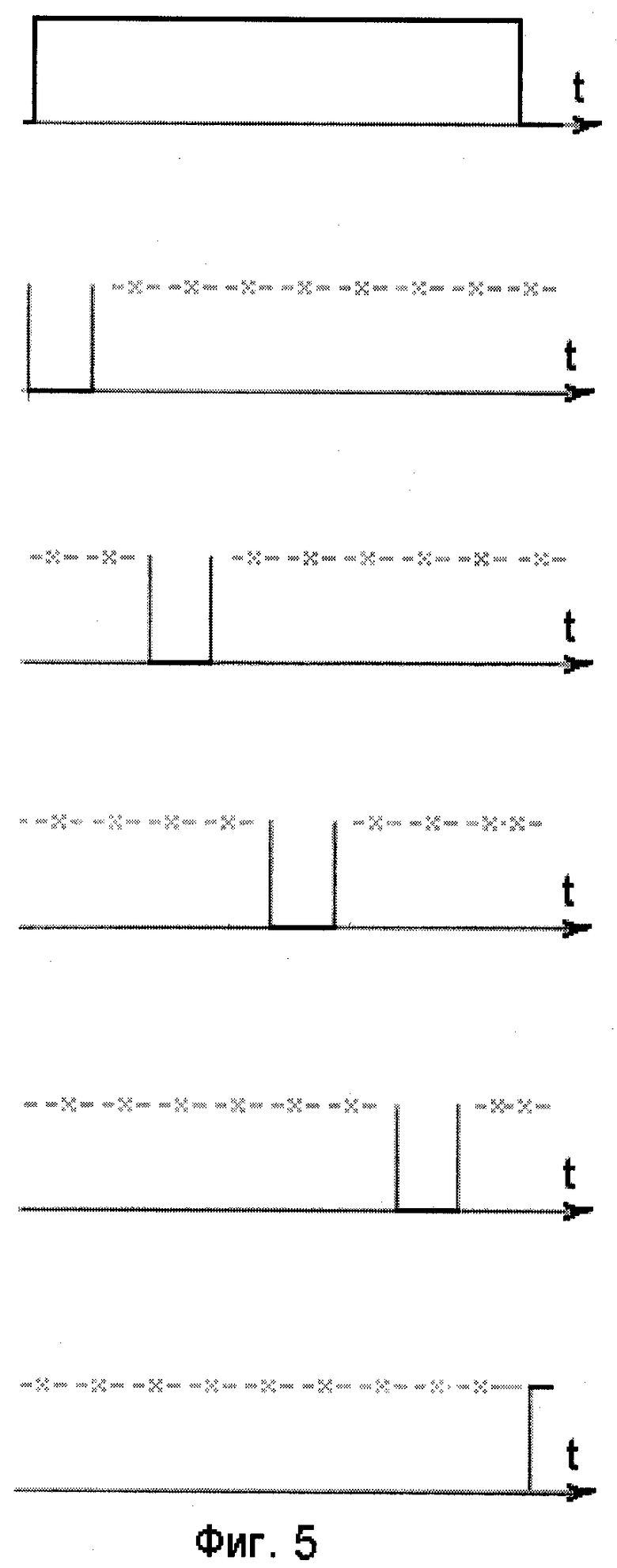
Фиг. 4, 5 показывают временные диаграммы сигналов управления задающего электронного блока. Фиг.4 соответствует работе первого варианта конструкции твердотельного волнового гироскопа, фиг.5 соответствует работе второго варианта конструкции твердотельного волнового гироскопа.
Твердотельный волновой гироскоп (фиг.1) содержит полусферический кварцевый резонатор 1 с металлизированной внутренней поверхностью 2, ножкой 3, шестнадцатью электродами корпуса 4, кольцевым электродом корпуса 5, нижнее основание корпуса 6.
Твердотельный волновой гироскоп работает следующим образом. При включении гироскопа происходит возбуждение колебаний резонатора на одной из собственных мод стоячих волн электродом корпуса, подключенным к схеме возбуждения электронного блока управления. При колебаниях резонатора изменяется интегральная величина зазора емкостных преобразователей перемещения, образованных электродами корпуса 4 и металлизированной поверхностью резонатора 2. Если пучность стоячей волны находится в центре электрода, изменение величины зазора максимально, а при нахождении в центре электрода узла стоячей волны изменения величины зазора не происходит. При нахождении стоячей волны между электродами изменение величины зазора в датчиках для второй собственной моды стоячей волны по соответствующим осям пропорционально удвоенному косинусу и синусу угла положения пучности стоячей волны. Изменение зазора вызывает изменение величины емкости в емкостных преобразователях перемещений и, соответственно, изменение амплитуды высокочастотных напряжений на выходе.
Задающий блок формирует сигналы управления U1-U6, подаваемые к группам электродов корпуса, расположенным по соответствующим осям резонатора, U7 - к кольцевому электроду корпуса, опорное напряжение U8 - к электроду резонатора, причем сигналы управления U1, U2, U3, U4 включают составляющие A1(t), A2(t), A3(t), A4(t) и B1(t)V1(t), B2(t)V2(t), B3(t)V3(t), B4(t)V4(t), где A1(t), A2(t), A3(t), A4(t) и B1(t), B2(t), B3(t), B4(t) являются заданными функциями времени t, V1(t), V2(t), V3(t), V4(t) являются управляющими напряжениями устройства подавления квадратурных колебаний, сигналы управления U5, U6 включают составляющие B5(t)V5(t), B6(t)V6(t), где B5(t), B6(t) являются заданными функциями времени t, V5(t), V6(t) являются управляющими напряжениями устройства подавления квадратурных колебаний, сигнал управления U7 включает составляющие C7(t)V7(t), где C7(t) является заданной функцией времени t, V7(t) является управляющим напряжением устройства стабилизации амплитуды колебаний, опорное напряжение U8 включает составляющие D8(t)F8(t), где D8(t) является заданной функцией времени t, F8(t) является периодической функцией времени t, составляющая опорного напряжения U8 D8(t) пропорциональна временной функции прямоугольных импульсов, принимающей значения 1 и 0, составляющие A1(t), A2(t), A3(t) и A4(t) пропорциональны временным функциям, принимающим значения 0 и высокого импеданса, причем функции A1(t), A2(t), A3(t) и A4(t) не равны 0 одновременно и принимают значение 0 при значении функции D8(t) равном 1, составляющие B1(t), B2(t), B3(t), B4(t), B5(t), B6(t) и C7(t) пропорциональны временной функции B0(t), принимающей значения высокого импеданса и 1, причем функция B0(t) принимает значение 1 при значении функции D8(t) равном 0, функция F8(t) - заданная периодическая функция времени t с частотой, большей 6Ω, где Ω является угловой частотой вибрации резонатора.
Для первого варианта конструкции электронный блок управления (фиг.2) содержит задающий блок 7, формирующий сигналы управления U1-U8, которые подаются на шестнадцать электродов корпуса 4, кольцевой электрод 5 и электрод резонатора 2. Работа схемы поясняется временной диаграммой (фиг.4). При значениях функции D8(t), равных единице, нулевой потенциал последовательно подключается к электродам по соответствующим осям, остальные электроды при этом находятся в состоянии высокого импеданса (разомкнуты), на электрод резонатора при этом подается высокочастотное напряжение через опорный резистор R. Сигнал с электрода резонатора 2 подается на входной блок 8, содержащий усилитель 9, перемножитель-демодулятор 10, на который подается опорная частота F8(t), фильтр низких частот 11, устройства хранения данных 12, сигнал на которые записывается синхронно с подачей нулевого потенциала на электроды по соответствующим осям, дифференциальные усилители 13, устройства формирования выходных сигналов 14, содержащие, например, сглаживающие фильтры. Напряжения с выходов устройств формирования выходных сигналов Vc и Vs, пропорциональные сигналам колебаний резонатора по соответствующим осям, подаются на входы устройства стабилизации амплитуды колебаний, устройства возбуждения и подавления квадратурных составляющих колебаний, устройства вычисления угла электронного блока управления. При значениях функции D8(t), равных нулю, на электрод резонатора подается нулевой потенциал, на электроды корпуса одновременно подаются сигналы управления.
В первом варианте конструкции входной блок выполняет операции умножения сигнала, поступающего с емкостного преобразователя перемещений, на заданную функцию времени F8(t), за которым следует фильтрация нижних частот, записи полученных значений в устройства хранения данных с емкостных преобразователей перемещений по соответствующим осям резонатора, причем каждая операция записи синхронизирована с нулевым значением функций A1(t), A2(t), A3(t) и A4(t), дифференциального суммирования сигналов с устройств хранения данных и подачи полученных сигналов в устройства формирования выходных сигналов по собственным осям колебаний резонатора.
Для второго варианта конструкции электронный блок управления (фиг.3) содержит задающий блок 7, формирующий сигналы управления U1-U8, которые подаются на шестнадцать электродов корпуса 4, кольцевой электрод 5 и электрод резонатора 2. Работа схемы поясняется временной диаграммой (фиг.5). При значениях функции D8(t), равных единице, нулевой потенциал последовательно подключается к электродам по соответствующим осям, остальные электроды при этом находятся в состоянии высокого импеданса (разомкнуты), на электрод резонатора при этом подается высокочастотное напряжение через опорный резистор R. Сигнал с электрода резонатора 2 подается на входной блок 8, содержащий усилитель 9, устройства хранения данных 10 и 11. Функции A1(t), A2(t), A3(t) и A4(t) синхронизированы с частотой заданной периодической функции времени F8(t), например длительность импульсов может составлять четверть периода, при этом в устройство хранения записывается максимальное значение амплитуды сигнала. Сигналы с устройств хранения данных поступают на дифференциальный усилитель 12, аналого-цифровой преобразователь 13, работа которого синхронизирована с функциями A3(t) и A4(t). Цифровые данные поступают в соответствующие регистры памяти цифрового процессора обработки сигналов 14, обрабатывающего получающиеся массивы данных, для выделения параметров колебаний резонатора по собственным осям. Цифровой процессор обработки сигналов может также использоваться для вычисления угла положения колебательной картины, вычисления функций управления.
Во втором варианте конструкции гироскопа входной блок выполняет операции записи сигнала емкостного преобразователя перемещений в первое устройство хранения данных, записи сигнала емкостного преобразователя перемещений во второе устройство хранения данных, причем каждая операция записи синхронизирована с нулевым значением функций A1(t), A2(t), A3(t) и A4(t), а функции A1(t), A2(t), A3(t) и A4(t) синхронизированы с частотой заданной периодической функции времени F8(t), дифференциального суммирования сигналов с устройств хранения данных, аналого-цифрового преобразования полученного сигнала и записи полученных данных в соответствующий регистр памяти цифрового процессора обработки сигналов.
Испытания заявляемой конструкции твердотельного волнового гироскопа проводились с резонатором диаметром 60 мм и частотой собственных колебаний 2,7 кГц, с металлизацией внутренней поверхности, при ширине электродов 10 мм, высоте электродов 5 мм, рабочем зазоре 100 мкм. Частота опорного переменного напряжения составляла 126 кГц, частота среза фильтров 10 кГц.
При амплитуде колебаний резонатора на воздухе 2 мкм и коэффициенте усиления 1000 амплитуда выходного сигнала для схемы фиг.2 составляла около 300 мВ.
Экспериментальные испытания заявляемой конструкции твердотельного волнового гироскопа подтверждают эффективность ее применения, приводящую к повышению точности измерения параметров колебаний резонатора и значительному упрощению конструкции твердотельного волнового гироскопа.
Источники информации
1. Патент РФ 2168702, G 01 C 19/56 (опубл. 10.06.2001).
2. Патент США 5763780, G 01 C 19/00 (опубл. 09.06.1998).
3. Ацюковский В.А. Емкостные преобразователи перемещения. М.-Л.: Энергия, 1966 г.
Изобретение относится к гироскопическому приборостроению и может быть использовано для измерения углов в системах управления. Твердотельный волновой гироскоп содержит резонатор в виде осесимметричного тонкостенного элемента, по меньшей мере один электрод резонатора, закрепленный на поверхности резонатора, корпус, к которому крепятся резонатор и множество электродов корпуса, находящихся в непосредственной близости к электродам резонатора, на электроды корпуса и резонатора подаются управляющие и опорные напряжения, отличается тем, что на электрод резонатора подается опорное напряжение, включающее составляющие напряжения высокой частоты для питания емкостного преобразователя перемещений, образованного электродами корпуса и электродом резонатора, на электроды корпуса подаются поочередно нулевой потенциал и напряжения управления, сигналы колебаний снимаются с электрода резонатора. Подача нулевого потенциала на электроды корпуса синхронизирована с подачей напряжения высокой частоты на электрод резонатора, подача сигналов управления синхронизирована с подачей нулевого потенциала на электрод резонатора. При этом повышается точность и упрощается конструкция прибора. 2 з.п. ф-лы, 5 ил.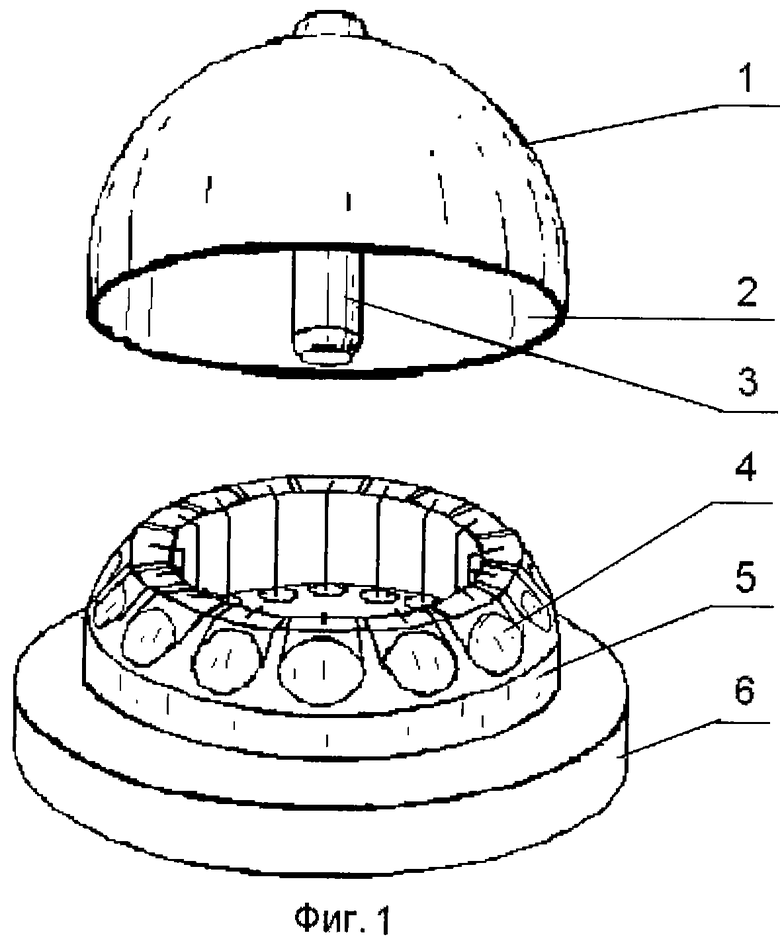
| US 5763780 A, 09.06.1998 | |||
| US 5902930 А, 11.05.1999 | |||
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2000 |
|
RU2168702C1 |
| EP 0895058 А2, 03.02.1999 | |||
| US 6065340 А, 23.05.2000. | |||

