Твердотельный волновой гироскоп относится к гироскопическому приборостроению и может быть использован для измерения угловых скоростей подвижных объектов.
В основе функционирования твердотельного волнового гироскопа (ТВГ) лежит физический принцип, основанный на инертных свойствах упругих механических стоячих волн в твердом теле, проявляющих себя в виде отставания угла поворота стоячей волны от поворота корпуса.
Известен твердотельный волновой гироскоп (Патент РФ №2207510, МПК G01C 19/56, опубл. 27.06.2003), содержащий резонатор в виде осесимметричного тонкостенного элемента, способного к вибрации по меньшей мере на одной из множества мод стоячих волн, по меньшей мере один электрод резонатора, закрепленный на поверхности резонатора, корпус, на котором закреплены резонатор и множество электродов корпуса, находящихся в непосредственной близости к одному или более электродам резонатора, электронный блок управления, содержащий устройства стабилизации амплитуды колебаний, подавления квадратурных колебаний, вычисления угла, входной блок, соединенный с электродом резонатора, задающий блок, соединенный с электродами корпуса и электродом резонатора, электродами корпуса и электродом резонатора образованы емкостные преобразователи перемещений. Задающий блок предназначен для подачи на электрод резонатора опорного напряжения, включающего составляющие высокой частоты, и на электроды корпуса сигналов управления, включающих нулевой потенциал для работы емкостных преобразователей перемещений. Входной блок содержит усилитель, перемножитель-демодулятор, на который подается опорное напряжение, фильтр низких частот, устройства хранения данных, сигнал на которые записывается синхронно с подачей нулевого потенциала на электроды по соответствующим осям резонатора, дифференциальные усилители для суммирования выходных сигналов и устройства формирования выходных сигналов по собственным осям колебаний резонатора.
Также известен твердотельный волновой гироскоп (Патент РФ №2182312, МПК G01C 19/56, опубл. 10.05.2002), содержащий резонатор в виде осесимметричного тонкостенного элемента, способного к вибрации по меньшей мере на одной из множества мод стоячих волн, по меньшей мере один электрод резонатора, закрепленный на внешней или внутренней поверхности резонатора, корпус, на котором закреплены резонатор, множество электродов датчиков и электродов управления, находящихся в непосредственной близости к одному или более электродам резонатора, электронный блок управления, соединенный с электродами резонатора, электродами датчиков, электродами управления и содержащий устройства стабилизации амплитуды колебаний, подавления квадратурных колебаний и вычисления угла, отличающийся тем, что электрод резонатора, закрепленный напротив электродов датчиков, присоединен к нулевому потенциалу, а электроды датчиков - к источникам опорных переменных токов высокой частоты, электродами датчиков и электродом резонатора образованы емкостные преобразователи перемещений. Электронный блок управления дополнительно содержит источники опорных переменных токов высокой частоты, дифференциальные усилители-сумматоры сигналов с емкостных преобразователей перемещений, устройства детектирования и фильтрации низких частот для выделения сигналов колебаний резонатора. Электроды управления и электроды датчиков закреплены на одной поверхности корпуса.
Недостатком указанных гироскопов является большое время вхождения в рабочий режим, обусловленное высокой добротностью резонатора.
Наиболее близким к заявляемому твердотельному волновому гироскопу является принимаемый за прототип твердотельный волновой гироскоп (Патент РФ №2168702, МПК G01C 19/56, опубл. 10.06.2001), содержащий резонатор в виде осесимметричного тонкостенного элемента, способного к вибрации по меньшей мере на одной из множества мод стоячих волн, по меньшей мере один электрод резонатора, закрепленный на внешней или внутренней поверхности резонатора, корпус, на котором закреплены резонатор, множество электродов датчиков, электродов управления, находящихся в непосредственной близости к одному или более электродам резонатора, электронный блок управления, соединенный с электродами резонатора, электродами датчиков, электродами управления и содержащий устройства стабилизации амплитуды колебаний, подавления квадратурных колебаний, вычисления угла, отличающийся тем, что дополнительно закреплен по меньшей мере один электрод на торцевой поверхности резонатора, а электроды датчиков закреплены на поверхности корпуса, параллельной торцевой поверхности резонатора, напротив электродов, закрепленных на торцевой поверхности резонатора. Электроды, закрепленные на торцевой поверхности резонатора, присоединены к нулевому потенциалу, а электроды датчиков - к источникам опорных переменных токов высокой частоты, электродами датчиков и электродами, закрепленными на торцевой поверхности резонатора, образованы емкостные преобразователи перемещений. Электронный блок управления дополнительно содержит источники опорных переменных токов высокой частоты, дифференциальные усилители-сумматоры сигналов с емкостных преобразователей перемещений, устройства детектирования и фильтрации низких частот для выделения сигналов колебаний резонатора. Электроды на торцевой поверхности резонатора электрически соединены с электродом резонатора, а электроды управления закреплены на поверхности корпуса напротив электрода резонатора.
Недостатком приведенной конструкции является низкая точность и стабильность гироскопа, обусловленная погрешностью определения положения колебательной картины из-за наличия раздельного выделения сигналов колебаний резонатора по собственным осям.
Целью изобретения является улучшение метрологических характеристик за счет уменьшения времени вхождения в рабочий режим и повышения точности и стабильности гироскопа.
Поставленная цель достигается тем, что твердотельный волновой гироскоп, содержащий резонатор в виде осесимметричного тонкостенного элемента, способного к вибрации, один электрод резонатора, множество электродов датчиков, электродов управления, электронный блок управления, содержащий устройства вычисления угла, стабилизации амплитуды колебаний, подавления квадратурных колебаний и соединенный с электродами резонатора, электродами датчиков, электродами управления, отличающийся тем, что электронный блок управления дополнительно содержит компаратор с гистерезисом, устройство фазовой автоподстройки частоты, модулятор, сумматор, аналого-цифровой преобразователь, микроконтроллер, при этом выходы устройств вычисления угла соединены через аналого-цифровой преобразователь с микроконтроллером, а также через устройство подавления квадратурных колебаний с устройством стабилизации амплитуды колебаний, причем выход устройства подавления квадратурных колебаний соединен с входом сумматора, выход одного из устройств вычисления угла последовательно соединен с компаратором с гистерезисом и устройством фазовой автоподстройки частоты, выход которого через модулятор соединен с сумматором.
Введение в структуру электронного блока управления компаратора с гистерезисом обеспечивает уменьшение времени вхождения гироскопа в рабочий режим за счет уменьшения потерь энергии стоячей волны до уровня, обеспечивающего нормальную работоспособность канала возбуждения и может быть рассчитано по формуле уравнения свободных затухающих колебаний:

где x(t) - амплитуда колебаний;
xmax - максимальная амплитуда колебаний;
ϑ - показатель потерь энергии стоячей волны, определяемый по формуле ϑ=Dω0;
D - коэффициент демпфирования, равный 
ω0 - собственная частота колебаний резонатора;
Q - добротность резонатора.
Таким образом, при Q=5⋅106 время вхождения в режим равно τe=1/υ=300 с. Введение компаратора с гистерезисом повышает коэффициент демпфирования, что сокращает время вхождения гироскопа в рабочий режим до 1 с, т.к. процесс вхождения гироскопа в рабочий режим протекает тем быстрее, чем больше коэффициент демпфирования.
Введением в структуру электронного блока управления устройства фазовой автоподстройки частоты реализуется автоматическая подстройка резонансной частоты гироскопа, зависящая от температуры рабочей среды, от конструкции осесимметричного тонкостенного элемента резонатора. Тем самым поддерживается амплитуда стоячей волны, соответствующая рабочему режиму гироскопа, что обеспечивает повышение точности и стабильности работы гироскопа.
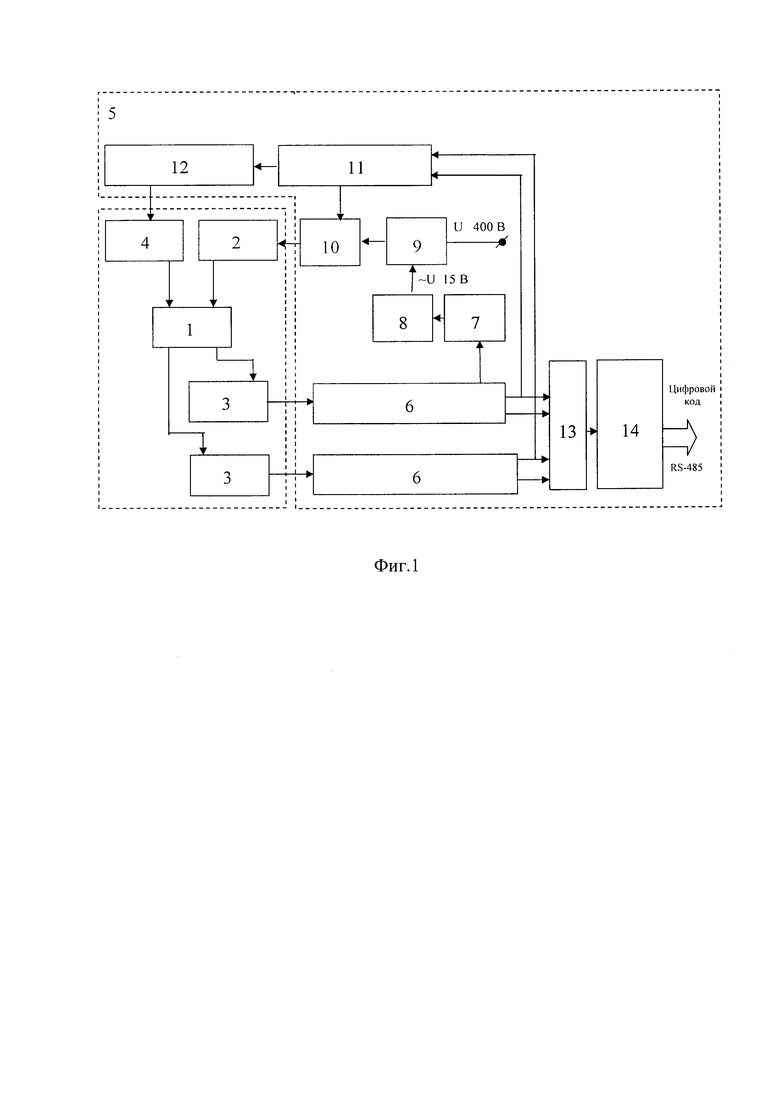
На фиг. 1 представлена структурная схема твердотельного волнового гироскопа.
Твердотельный волновой гироскоп содержит резонатор 1 в виде осесимметричного тонкостенного элемента, способного к вибрации, один электрод резонатора 2, восемь электродов датчиков 3, объединенных в две группы по четыре штуки в каждой, шестнадцать электродов управления 4 и электронный блок управления 5. Электронный блок управления 5 содержит два устройства вычисления угла 6, компаратор с гистерезисом 7, устройство фазовой автоподстройки частоты 8, модулятор 9, сумматор 10, устройство подавления квадратурных колебаний 11, устройство стабилизации амплитуды колебаний 12, аналого-цифровой преобразователь 13 и микроконтроллер 14. Электронный блок управления 5 соединен с резонатором 1 через электрод резонатора 2, электроды датчиков 3 и электроды управления 4. Выходы электродов датчиков 3 соединены с устройствами вычисления угла 6, при этом выход одной группы из четырех электродов датчиков 3 соединены с устройством вычисления синфазной составляющей угла 6, а выход другой группы из четырех электродов датчиков 3-е устройством вычисления квадратурной составляющей угла 6. Один выход устройства вычисления синфазной составляющей угла 6 соединен последовательно с компаратором с гистерезисом 7, устройством фазовой автоподстройки частоты 8, модулятором 9 и сумматором 10. Четыре выхода устройств вычисления синфазной и квадратурной составляющих угла 6 соединены через аналого-цифровой преобразователь 13 с входом микроконтроллера 14. При этом один выход устройства вычисления синфазной составляющей угла 6 и один выход устройства вычисления квадратурной составляющей угла 6 соединены через устройство подавления квадратурных колебаний 11 с входом устройства стабилизации амплитуды колебаний 12.
Твердотельный волновой гироскоп работает следующим образом. При включении гироскопа для возбуждения стоячей волны к резонатору 1 прикладываются две диаметрально противоположные силы, создаваемые электродами управления 4, подключенными к схеме возбуждения электронного блока управления 5. Под действием приложенных сил резонатор 1 примет эллиптическую форму. Приложенные силы в заданные моменты времени становятся равными нулю, а резонатор 1, обладающий определенной жесткостью, проходя через недеформированное состояние, под действием сил инерции будет деформироваться в ортогональном направлении. Возбуждение стоячей волны в резонаторе происходит в режиме автогенератора на собственной частоте колебаний. По достижении заданной амплитуды колебаний резонатора 1 электроды управления 4 отключаются, и включается электрод резонатора 2, поддерживающий постоянство амплитуды колебаний в резонаторе 1 для любого положения стоячей волны относительно основания. При колебаниях резонатора 1 изменяется площадь перекрытия электродов датчиков 3, выполняющих функцию измерения положения стоячей волны. Выходные сигналы электродов датчиков 3 подаются на устройства вычисления угла 6, в которых измеряются синфазные и квадратурные составляющие выходных сигналов электродов датчиков 3. Синфазные и квадратурные составляющие сигналов, последовательно поступающие на аналого-цифровой преобразователь 13 и микроконтроллер 14, преобразуются в цифровой код. Синфазные составляющие выходных сигналов с устройств вычисления угла 6 подаются через устройство подавления квадратурных колебаний 11 на устройство стабилизации амплитуды колебаний 12. Выходной сигнал с устройства вычисления угла 6 последовательно подается на компаратор с гистерезисом 7, устройство фазовой автоподстройки частоты 8, модулятор 9 и сумматор 10. При этом на сумматор 10 одновременно подаются выходной сигнал модулятора 9 и выходной сигнал устройства подавления квадратурных колебаний 11. Выходной сигнал сумматора 10 подается на электрод резонатора 2 и обеспечивает поддержание постоянной амплитуды колебаний в резонаторе 1.
Технический результат заключается в улучшении метрологических характеристик за счет уменьшения времени вхождения в режим, обусловленного компаратором с гистерезисом, обеспечивающим уменьшение потерь энергии стоячей волны до уровня нормальной работоспособности канала возбуждения, и повышения точности и стабильности гироскопа, обусловленного устройством фазовой автоподстройки частоты, обеспечивающим автоматическую подстройку резонансной частоты, зависящей от температуры рабочей среды гироскопа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пространственный интегрирующий твердотельный волновой гироскоп | 2020 |
|
RU2763688C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2001 |
|
RU2196964C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2001 |
|
RU2182312C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2000 |
|
RU2168702C1 |
| СПОСОБ СЧИТЫВАНИЯ И УПРАВЛЕНИЯ ТВЕРДОТЕЛЬНЫМ ВОЛНОВЫМ ГИРОСКОПОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2194249C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2001 |
|
RU2207510C2 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП С ОПТИЧЕСКИМИ ДАТЧИКАМИ КОЛЕБАНИЙ РЕЗОНАТОРА | 2001 |
|
RU2186340C1 |
| СПОСОБ СЧИТЫВАНИЯ И УПРАВЛЕНИЯ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА С ОПТИЧЕСКИМИ ДАТЧИКАМИ КОЛЕБАНИЙ РЕЗОНАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2194947C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП С ОПТИЧЕСКИМИ ДАТЧИКАМИ КОЛЕБАНИЙ РЕЗОНАТОРА И СПОСОБ СЧИТЫВАНИЯ И УПРАВЛЕНИЯ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2001 |
|
RU2185601C1 |
| ИНЕРЦИАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО С ЦИФРОВЫМ СРЕДСТВОМ УПРАВЛЕНИЯ | 2019 |
|
RU2731656C1 |
Изобретение относится к метрологии, в частности, к твердотельным волновым гироскопам. Твердотельный волновой гироскоп содержит резонатор в виде осесимметричного тонкостенного элемента, способного к вибрации, один электрод резонатора, множество электродов датчиков, электродов управления, электронный блок управления, содержащий устройства вычисления угла, стабилизации амплитуды колебаний, подавления квадратурных колебаний и соединенный с электродами резонатора, электродами датчиков, электродами управления. Электронный блок управления дополнительно содержит компаратор с гистерезисом, устройство фазовой автоподстройки частоты, модулятор, сумматор, аналого-цифровой преобразователь, микроконтроллер. Выходы устройств вычисления угла соединены через аналого-цифровой преобразователь с микроконтроллером, а также через устройство подавления квадратурных колебаний с устройством стабилизации амплитуды колебаний. Выход устройства подавления квадратурных колебаний соединен с входом сумматора, выход одного из устройств вычисления угла последовательно соединен с компаратором с гистерезисом и устройством фазовой автоподстройки частоты, выход которого через модулятор соединен с сумматором. Технический результат - улучшение метрологических характеристик за счет уменьшения времени вхождения в рабочий режим, повышение точности и стабильности гироскопа. 1 ил.
Твердотельный волновой гироскоп, содержащий резонатор в виде осесимметричного тонкостенного элемента, способного к вибрации, один электрод резонатора, множество электродов датчиков, электродов управления, электронный блок управления, содержащий устройства вычисления угла, стабилизации амплитуды колебаний, подавления квадратурных колебаний и соединенный с электродами резонатора, электродами датчиков, электродами управления, отличающийся тем, что электронный блок управления дополнительно содержит компаратор с гистерезисом, устройство фазовой автоподстройки частоты, модулятор, сумматор, аналого-цифровой преобразователь, микроконтроллер, при этом выходы устройств вычисления угла соединены через аналого-цифровой преобразователь с микроконтроллером, а также через устройство подавления квадратурных колебаний с устройством стабилизации амплитуды колебаний, причем выход устройства подавления квадратурных колебаний соединен с входом сумматора, выход одного из устройств вычисления угла последовательно соединен с компаратором с гистерезисом и устройством фазовой автоподстройки частоты, выход которого через модулятор соединен с сумматором.
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2000 |
|
RU2168702C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2001 |
|
RU2196964C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2001 |
|
RU2207510C2 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ АМПЛИТУДЫ КОЛЕБАНИЙ ПОЛУСФЕРИЧЕСКОГО РЕЗОНАТОРА | 1992 |
|
RU2011168C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП (ВАРИАНТЫ) И СПОСОБЫ ЕГО НАСТРОЙКИ, ОСНОВАННЫЕ НА ИСПОЛЬЗОВАНИИ АМПЛИТУДНО-МОДУЛИРОВАННОГО КВАДРАТУРНОГО ТЕСТОВОГО ВОЗДЕЙСТВИЯ | 2008 |
|
RU2388999C1 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| US 20110192226 A1, 11.08.2011 | |||
| US 5361036 A1, 01.11.1994 | |||
| US 7805993 B2, 05.10.2010 | |||
| US 20130283908 A1, 31.10.2013 | |||
| US 8752429 B2, 17.06.2014 | |||
| US 7827864 B2, 09.11.2010 | |||
| US 9671247 B2, | |||

