Изобретение относится к гироскопическому приборостроению и может быть использовано для измерения углов в системах управления.
Известен акустический колоколообразный вибрационный гироскоп, содержащий полусферический кварцевый резонатор с металлизированными внешней и внутренней полусферическими поверхностями, корпус, состоящий из нижнего и верхнего оснований. Восемь электродов датчиков расположены на полусферической поверхности верхнего основания корпуса, а кольцевой и шестнадцать дискретных электродов управления расположены на полусферической поверхности нижнего основания корпуса [1].
Наиболее близким по конструкции к предлагаемому изобретению является вибрационный датчик вращения, содержащий полусферический кварцевый резонатор с металлизированными внешней и внутренней полусферическими поверхностями, корпус, на котором закреплен резонатор, на полусферической поверхности верхнего основания корпуса закреплены кольцевой и шестнадцать электродов управления, а восемь электродов датчиков закреплены на полусферической поверхности нижнего основания [2].
В указанных гироскопах внешняя или внутренняя металлизированная поверхность резонатора подключается к постоянному потенциалу. Сигналы колебаний резонатора снимаются с буферных усилителей со сверхвысоким входным импедансом, подключенных к электродам верхнего или нижнего основания корпуса соответственно и подаются на вход электронного блока управления, выходы которого подключены к кольцевому и дискретным электродам управления.
К недостаткам известных конструкций гироскопов можно отнести следующее:
- металлизация внешней и внутренней поверхностей значительно снижает добротность резонатора;
- датчики на нижнем или верхнем основании находятся в области середины полусферической поверхности резонатора, где амплитуда колебаний резонатора значительно меньше, чем амплитуда колебаний кромки резонатора, что приводит к снижению точности измерений;
- постоянное напряжение на поверхности резонатора приводит к появлению токов утечки между электродами и, как следствие, возникновению дополнительных составляющих ухода гироскопа;
- малая величина рабочих зазоров между поверхностями верхнего основания, резонатора и нижнего основания требует высокой точности изготовления деталей и поддержания высокого вакуума в приборе.
Предлагаемым изобретением решается задача повышения точности, надежности и технологичности твердотельных волновых гироскопов.
Для достижения указанного технического результата твердотельный волновой гироскоп, содержит резонатор в виде осесимметричного тонкостенного элемента, способного к вибрации по меньшей мере на одной из множества мод стоячих волн, по меньшей мере один электрод резонатора, закрепленный на внешней или внутренней поверхности резонатора, корпус, на котором закреплен резонатор и множество электродов датчиков, электродов управления, находящихся в непосредственной близости к одному или более электродам резонатора, электронный блок управления, соединенный с электродами резонатора, электродами датчиков, электродами управления и содержащий устройства стабилизации амплитуды колебаний, подавления квадратурных колебаний, вычисления угла, по меньшей мере один электрод закреплен на торцевой поверхности резонатора, а электроды датчиков расположены на поверхности корпуса, параллельной торцевой поверхности резонатора напротив электродов на торцевой поверхности резонатора.
С целью устранения ухода, вызванного постоянными токами утечки, электроды, закрепленные на торцевой поверхности резонатора, присоединены к нулевому потенциалу, а электроды датчиков к источникам опорных переменных токов высокой частоты; электродами датчиков и электродами, закрепленными на торцевой поверхности резонатора образованы емкостные преобразователи перемещений.
Для питания емкостных преобразователей перемещений электронный блок управления дополнительно содержит источники опорных переменных токов высокой частоты, дифференциальные усилители-сумматоры сигналов с емкостных преобразователей перемещений, устройства детектирования и фильтрации низких частот для выделения сигналов колебаний резонатора.
Для работы электродов управления необходим нулевой потенциал на электроде резонатора, поэтому электроды на торцевой поверхности резонатора электрически соединены с электродом резонатора, а электроды управления закреплены на поверхности корпуса напротив электрода резонатора.
В заявляемой конструкции:
- металлизируется полностью или частично одна внешняя или внутренняя поверхность резонатора, что приводит к увеличению добротности;
- электроды датчиков колебаний резонатора расположены на поверхности корпуса, параллельной торцевой поверхности резонатора, напротив электродов на торцевой поверхности резонатора; амплитуда торцевых колебаний резонатора максимальна, что повышает точность измерения параметров колебаний;
- сигналы колебаний резонатора снимаются с емкостных преобразователей перемещения [3], образованных электродами датчиков и электродом на торцевой поверхности резонатора. На электроды датчиков подаются опорные токи высокой частоты, не влияющие существенно на динамику резонатора. С целью повышения точности измерения колебаний резонатора каждый датчик может состоять из двух электродов, включенных по дифференциальной схеме. Работа датчиков на высокочастотном переменном токе позволяет избежать появления составляющих ухода, вызванных постоянными токами утечки;
- использование емкостных преобразователей перемещения, образованных электродами корпуса и торцевой поверхностью резонатора упрощает конструкцию всего прибора для любого типа резонаторов - полусферических, конических, цилиндрических и т.п. В заявляемых конструкциях твердотельного волнового гироскопа с полусферическим резонатором либо отсутствует полусферическая поверхность на нижнем основании корпуса, либо полностью отсутствует верхнее основание корпуса. При этом существенно увеличивается рабочий зазор между основаниями корпуса и резонатором, что позволяет снизить требования к степени вакуума в приборе.
Сущность изобретения поясняется чертежами, представленными на фигурах 1-6.
Фиг. 1 показывает общий вид твердотельного волнового гироскопа с электрически соединенными металлизированными внешней и торцевой поверхностями резонатора, электродами управления, закрепленными на внутренней полусферической поверхности верхнего основания корпуса.
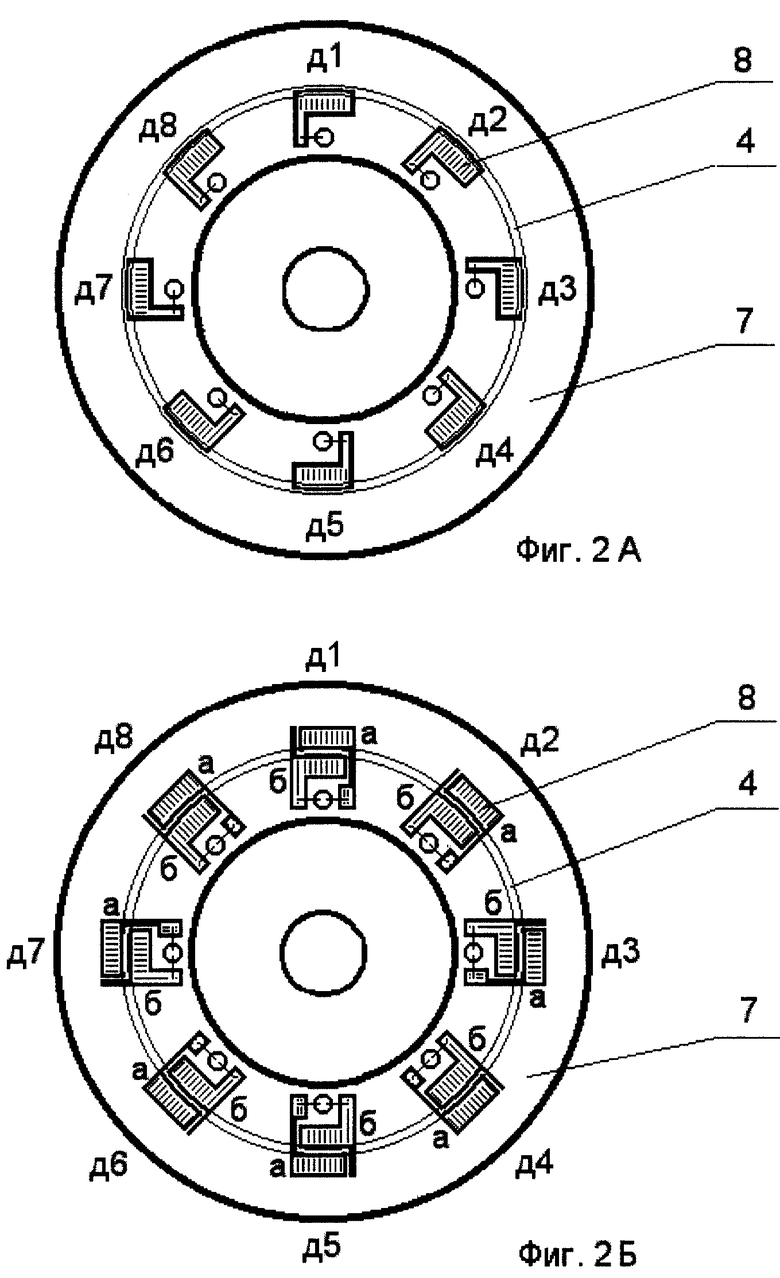
Фиг. 2 показывает расположение электродов датчиков на нижнем основании корпуса для конструкции твердотельного волнового гироскопа на фиг. 1. Фиг. 2А соответствует датчикам, состоящим из одного электрода, фиг. 2Б - из двух.
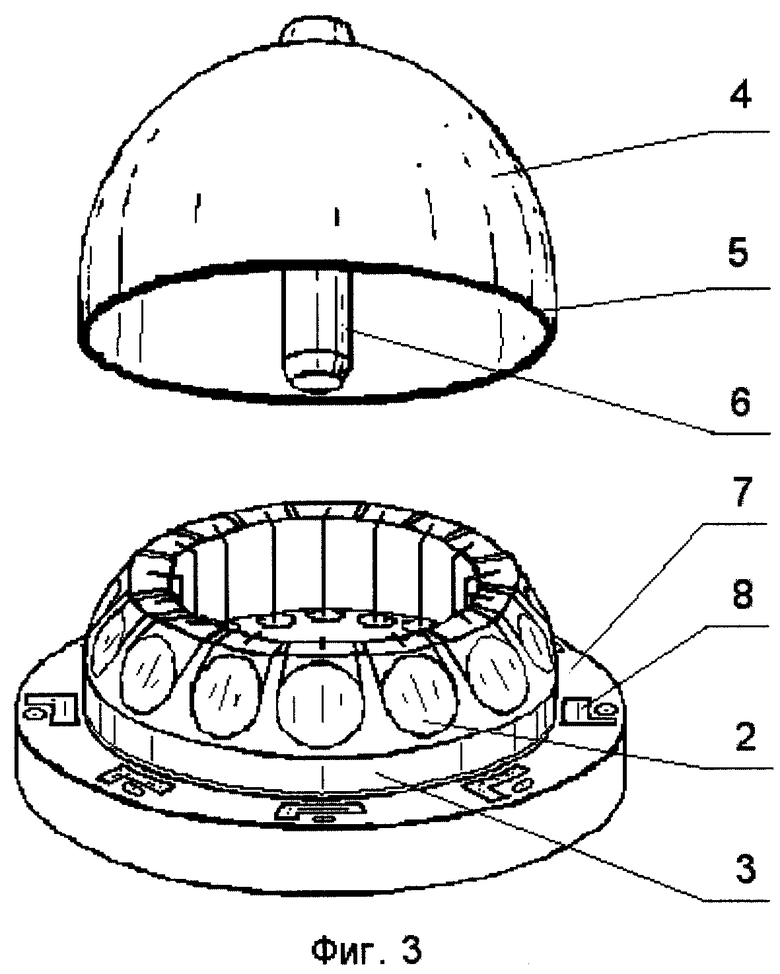
Фиг. 3 показывает общий вид твердотельного волнового гироскопа с электрически соединенными металлизированными внутренней и торцевой поверхностями резонатора, электродами управления, закрепленными на внешней полусферической поверхности нижнего основании корпуса
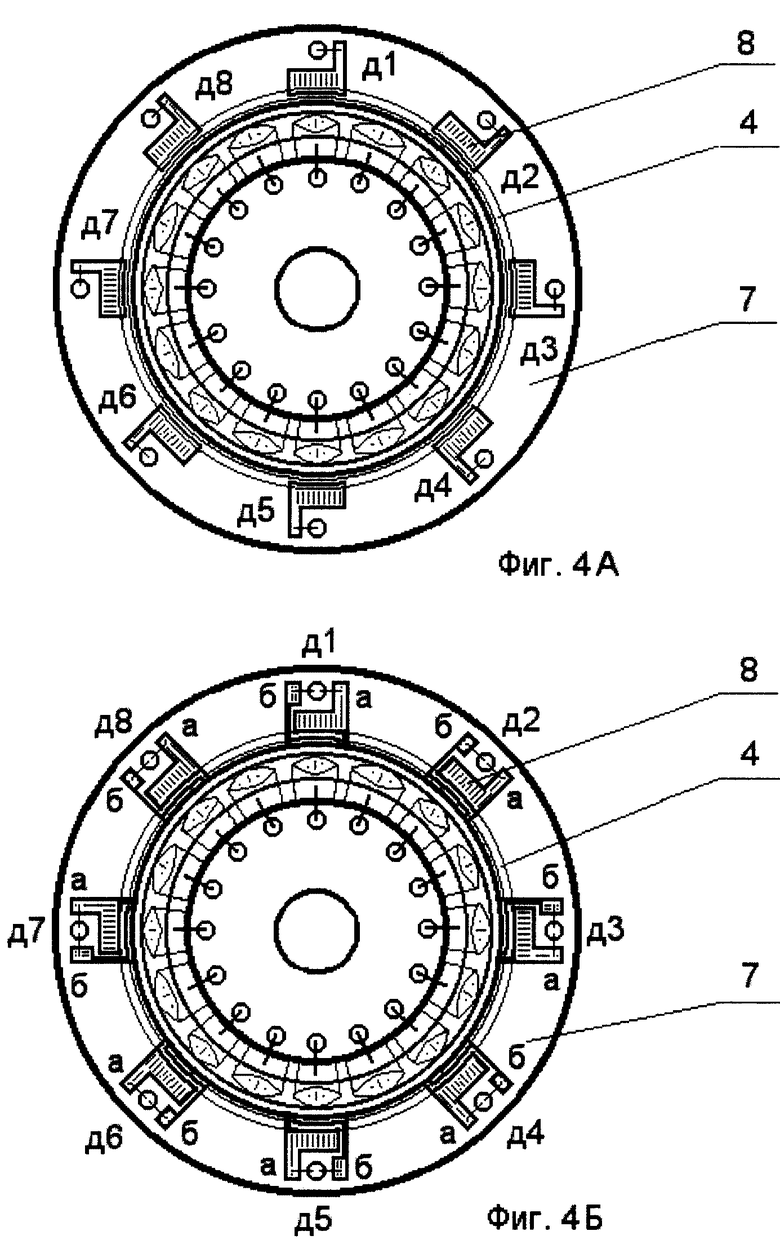
Фиг. 4 показывает расположение электродов датчиков на нижнем основании корпуса для конструкции твердотельного волнового гироскопа на фиг. 3. Фиг. 4А соответствует датчикам, состоящим из одного электрода, фиг. 4Б - из двух.
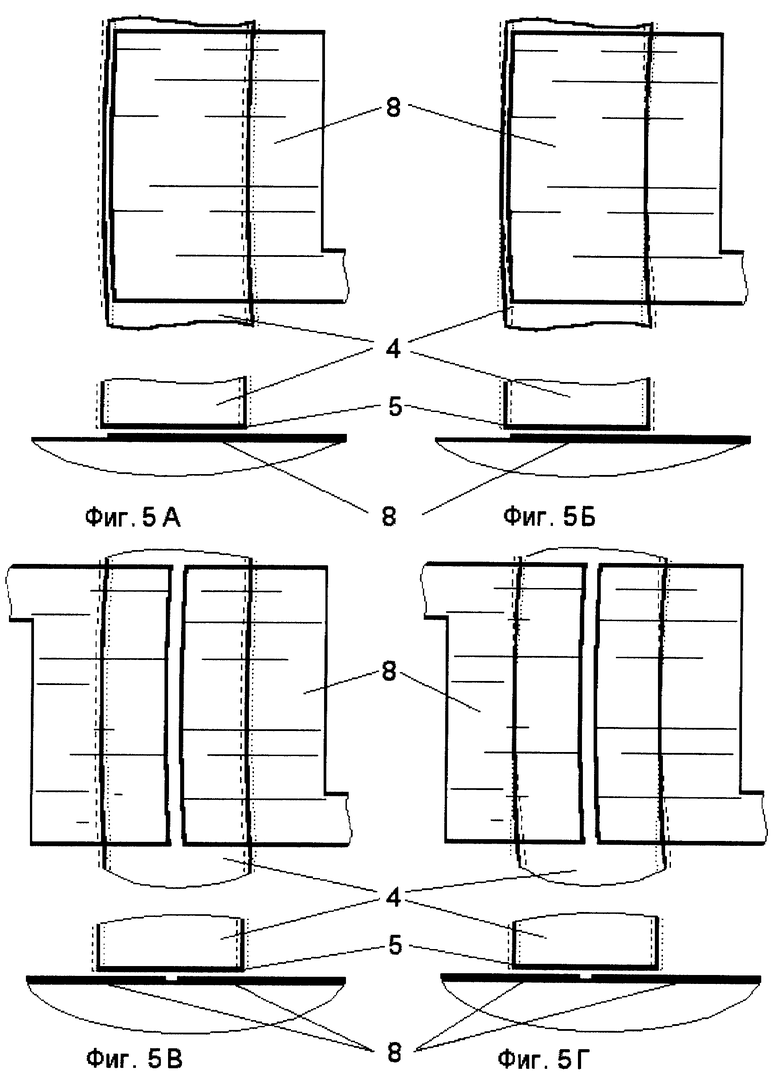
Фиг. 5 показывает изменение площади перекрытия датчиков при колебаниях резонатора. Фиг. 5А, 5Б соответствует датчикам, состоящим из одного электрода, фиг. 5В, 5Г - из двух. Фиг. 5А, 5В соответствуют положению пучности стоячей волны, фиг. 5Б, 5Г - узла стоячей волны в центре датчиков.
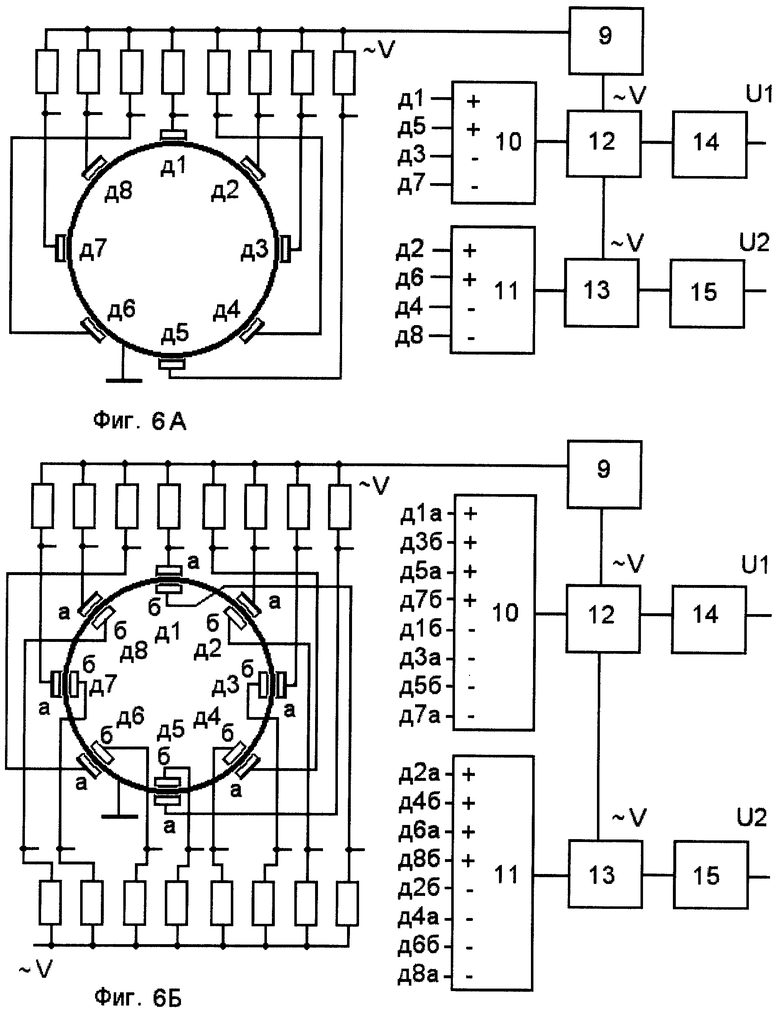
Фиг. 6 показывает функциональную схему устройства выделения сигналов колебаний резонатора электронного блока управления при подаче нулевого потенциала на торцевой электрод и электрически связанный с ним электрод на внешней или внутренней поверхности резонатора. Фиг. 6А соответствует включению датчиков, состоящих из одного электрода на нижнем основании корпуса, фиг. 6Б - из двух.
Твердотельный волновой гироскоп (фиг. 1), содержит верхнее основание корпуса 1 с дискретными 2 и кольцевым 3 электродами управления, полусферический кварцевый резонатор 4 с металлизированной торцевой поверхностью 5 и ножкой 6, нижнее основание корпуса 7 с электродами датчиков 8.
Твердотельный волновой гироскоп работает следующим образом. При включении гироскопа происходит возбуждение колебаний резонатора на одной из собственных мод стоячих волн дискретным электродом управления, подключенным к схеме возбуждения электронного блока управления. При колебаниях резонатора изменяется площадь перекрытия емкостных преобразователей перемещения, образованных электродами датчиков на нижнем основании корпуса 8 и торцевой поверхностью резонатора 5 (фиг. 5). Геометрические размеры датчика, резонатора и величины смещения резонатора показаны условно. Если пучность стоячей волны находится в центре датчика, изменение площади максимально (фиг. 5А, 5В), а при нахождении в центре датчика узла стоячей волны (фиг. 5Б, 5Г) изменения площади не происходит. При нахождении стоячей волны между датчиками изменение площади перекрытия датчиков для второй собственной моды стоячей волны по соответствующим осям пропорционально удвоенному косинусу и синусу угла положения пучности стоячей волны.
Электронный блок управления (фиг. 6) дополнительно содержит источники опорных переменных токов высокой частоты, подключенные к электродам датчиков, например эталонные резисторы, соединенные с выходом генератора переменного напряжения 9, вырабатывающего напряжение, являющееся периодической функцией времени t с частотой ω1, причем значение ω1 больше, чем 6ω, где ω является угловой частотой колебаний резонатора. Для датчиков, состоящих из одного электрода, сигналы с датчиков д1 и д5 подаются на прямой вход, а сигналы с датчиков д3 и д7 - на инверсный вход дифференциального усилителя-сумматора 10, сигналы с датчиков д2 и д6 подаются на прямой вход, а сигналы с датчиков д4 и д8 - на инверсный вход дифференциального усилителя-сумматора 11 (фиг. 6А). Для датчиков, состоящих из двух электродов, сигналы с датчиков д1а, д3б, д5а, д7б подаются на прямой вход, а сигналы с датчиков д1б, д3а, д5б, д7а - на инверсный вход дифференциального усилителя-сумматора 10, сигналы с датчиков д2а, д4б, д6а, д8б подаются на прямой вход, а сигналы с датчиков д2б, д4а, д6б, д8а - на инверсный вход дифференциального усилителя-сумматора 11 (фиг. 6Б). Выходы усилителей подключаются к синхронным детекторам 12 и 13, на которые подается опорное переменное напряжение, сигнал с детекторов подается на фильтры низких частот 14 и 15 с частотой среза меньше, чем 6ω, где ω является угловой частотой колебаний резонатора. Аналогичное устройство может быть реализовано и при подаче прямого и инверсного напряжения высокой частоты на соответствующие группы датчиков, с последующим сложением сигналов на обычных сумматорах. Напряжения на выходе фильтров U1 и U2 пропорциональны сигналам колебаний резонатора по соответствующим осям и подаются на входы устройства стабилизации амплитуды колебаний, устройства возбуждения и подавления квадратурных составляющих колебаний, устройства вычисления угла электронного блока управления.
В электронном блоке управления могут быть применены аналого-цифровые преобразователи суммарных сигналов и цифровые процессоры обработки сигналов для выполнения операций цифровой демодуляции и фильтрации сигналов датчиков, с последующей обработкой сигналов колебаний резонатора твердотельного волнового гироскопа.
Испытания заявляемой конструкции твердотельного волнового гироскопа проводились с резонатором диаметром 60 мм, толщиной стенки резонатора 1.8 мм и частотой собственных колебаний 2,7 кГц, с металлизацией торцевой и внешней поверхностей, при ширине электродов датчиков 15 мм, расстоянии между торцевой поверхностью резонатора и электродами датчиков 100 мкм. Частота опорного переменного напряжения составляла 126 кГц, частота среза фильтров 10 кГц.
При амплитуде колебаний резонатора на воздухе 2 мкм и коэффициенте усиления 1000 амплитуда выходного сигнала для схемы фиг. 6А составляла 160 мВ, для схемы фиг. 6Б - 390 мВ. Автоколебательная схема с одним дискретным электродом обеспечивала устойчивое возбуждение колебаний резонатора на воздухе.
Экспериментальные испытания заявляемой конструкции твердотельного волнового гироскопа подтверждают эффективность ее применения, приводящую к повышению точности измерения параметров колебаний резонатора, значительному упрощению конструкции твердотельного волнового гироскопа и снижению требований к степени вакуума в приборе.
Источники информации
1. Патент США N 4157041, G 01 С 19/56 (опубл. 05.06.79).
2. Патент США N 4951508, G 01 С 19/56 (опубл. 28.08.90).
3. Ацюковский В.А. Емкостные преобразователи перемещения. М.-Л.: Энергия, 1966 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2001 |
|
RU2196964C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2001 |
|
RU2182312C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП С ОПТИЧЕСКИМИ ДАТЧИКАМИ КОЛЕБАНИЙ РЕЗОНАТОРА | 2001 |
|
RU2186340C1 |
| СПОСОБ СЧИТЫВАНИЯ И УПРАВЛЕНИЯ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА С ОПТИЧЕСКИМИ ДАТЧИКАМИ КОЛЕБАНИЙ РЕЗОНАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2194947C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП С ОПТИЧЕСКИМИ ДАТЧИКАМИ КОЛЕБАНИЙ РЕЗОНАТОРА И СПОСОБ СЧИТЫВАНИЯ И УПРАВЛЕНИЯ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2001 |
|
RU2185601C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2001 |
|
RU2207510C2 |
| СПОСОБ СЧИТЫВАНИЯ И УПРАВЛЕНИЯ ТВЕРДОТЕЛЬНЫМ ВОЛНОВЫМ ГИРОСКОПОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2194249C1 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| Твердотельный волновой гироскоп | 2019 |
|
RU2708907C1 |
| Способ считывания и управления колебаниями волнового твердотельного гироскопа | 2019 |
|
RU2704334C1 |
Изобретение может быть использовано для измерения углов в системах управления. Гироскоп содержит резонатор в виде осесимметричного тонкостенного элемента. По меньшей мере один электрод резонатора закреплен на его внешней или внутренней поверхности. На корпусе закреплены электроды датчиков, электроды управления. Дополнительно закреплены электроды на торцевой поверхности резонатора и подключены к нулевому потенциалу, а электроды датчиков находятся на поверхности корпуса, параллельной торцевой поверхности резонатора, напротив электродов, закрепленных на торцевой поверхности резонатора. На электроды датчиков подается опорный переменный ток высокой частоты, сигналы колебаний резонатора снимаются с емкостных преобразователей перемещений, образованных электродами датчиков и электродами, закрепленными на торцевой поверхности резонатора. Обеспечивается повышение точности и упрощение конструкции гироскопа. 3 з.п. ф-лы, 12 ил.
| Способ получения гомогенной полимерной мембраны | 1960 |
|
SU141621A1 |
| RU 2056038 C1, 10.03.1996 | |||
| US 5712427, 27.01.1998. | |||

