Изобретение относится к области измерительной техники и может быть использовано для измерения расхода воды в гидротехнических сооружениях, в том числе на гидроэлектростанциях.
Цель изобретения - повышение точности измерения расхода воды, протекающей через прямоугольное измерительное сечение водовода с неравномерными скоростями течений потока, и сокращение времени проведения измерений.
Как известно, расход воды в гидротехнических сооружениях определяют по методу площадь-скорость [1]. Скорость потока, которая является одним из гидродинамических параметров, определяют различными измерителями, в том числе гидрометрическими вертушками. Часто для решения этой задачи применяют точечный способ [1, 2], основанный на измерении средней скорости потока в отдельных, строго определенных точках сечения водовода.
Одним из недостатков данного способа является относительно низкая точность измерений из-за принципиального ограничения количества точек измерения. Излишне частые вертушки, установленные на измерительной штанге, стесняют течение и видоизменяют его, а излишне частые горизонтали увеличивают время измерений. Кроме того, для реализации точечного способа необходимы длительные измерения и трудоемкая обработка данных.
Известен интеграционный способ измерения расхода [1], заключающийся в равномерном непрерывном перемещении измерительной штанги с набором вертушек из крайнего нижнего положения в верхнее и обратно. Однако этот способ дает повышенные замеры расхода по сравнению с точечным способом за счет косого натекания воды на лопасти вертушек и поэтому является менее точным.
Ближайшим аналогом заявленного изобретения является способ измерения расхода воды с помощью гидрометрических лотков [3]. Сущность этого способа заключается в том, что для лотка, используемого в гидрометрических измерениях, выбирают измерительный участок в зоне с критическим и сверхкритическим течением, размещают там гидрометрический лоток и, делая допущение, что "коэффициент Кориолиса примерно равен единице", определяют (примерно) расход воды по формуле, в которую входят коэффициенты, характеризующие конструкцию лотка и значение скорости потока воды в лотке, причем скорость принимается равномерной и ее можно измерить, "например, либо в одной точке измерительного сечения, либо в пределах заданного участка лотка ультразвуковым измерителем скорости".
Этот способ определения расхода воды по существу является точечным, поскольку лоток устанавливают в одном фиксированном месте водотока (русла, канала), а усредненную скорость, измеренную в сечении лотка, используют для определения расхода воды всего гидротехнического сооружения. Очевидно, что при таких допущениях точность измерения расхода воды будет низкой даже при использовании точных ультразвуковых измерителей скорости.
В общем случае точное (или абсолютное) значение расхода воды Q через измерительное сечение водовода с неравномерными скоростями течений потока определяют по классическому выражению [1, 4]:
где S - площадь сечения водовода;
х, у - координаты в прямоугольном сечении водовода;
v - составляющая вектора скорости течения, нормальная к плоскости сечения водовода.
Для определения расхода воды в водоводах с прямоугольным сечением нужно производить интегрирование местных скоростей потока по всей площади S как вдоль горизонтальной координаты х, так и вдоль вертикальной координаты у, что является трудно осуществимой задачей. С появлением ультразвуковых измерителей скорости стало возможным получение точного значения расхода воды с неравномерными скоростями течений, так как среднее значение скорости vсрх для ультразвуковых измерителей скорости равно интегралу местных скоростей течения вдоль расстояния Х и определяется выражением [5]:
В заявленном способе измерения расхода воды с неравномерными скоростями течений потока задача повышения точности достигается за счет измерения местных скоростей по всей площади водовода. При выбранной авторами скорости сканирования сечения водовода создается информационный растр с количеством измерений, оптимальным как для учета неравномерности скоростей по всему сечению водовода, так и по времени получения результата измерения расхода воды. При этом случайная погрешность измерения скорости потока воды снижается в сотни раз, а точность измерения расхода воды приближается к значению, определяемому формулой (1). Можно сказать, что расход Q определяется численным интегрированием показаний ультразвукового измерителя скорости, поскольку даже при оптимальной величине времени измерений количество измерений вдоль координаты у очень велико.
Это техническое решение достигается за счет того, что скользящую штангу с установленными на ней двумя датчиками ультразвукового измерителя скорости перемещают в вертикальной плоскости с такой постоянной скоростью, чтобы перемещение скользящей штанги за время каждого измерения скорости не превышало ширину диаграммы направленности датчиков, результаты измерений скорости потока воды корректируют с учетом величины скорости движения скользящей штанги, а расход воды через измерительное сечение водовода с неравномерными скоростями течений определяют через среднюю скорость потока по зависимости:
где Q - расход воды через водовод;
S - площадь сечения водовода;
vср - средняя скорость потока воды;
Х - размер водовода вдоль координаты х,
Nу - количество измерений, проведенных при сканировании водовода вдоль координаты у;
vх - составляющая вектора скорости потока вдоль координаты х, нормальная к вертикальной плоскости сечения водовода.
Рассмотрим предварительные соображения для реализации предлагаемого изобретения. Скользящая штанга - жесткая конструкция, позволяющая так перемещать установленные на ней два датчика ультразвукового измерителя скорости в вертикальном направлении, чтобы датчики оставались в одной вертикальной плоскости. Необходимость использования двух датчиков обусловлена принципом работы ультразвукового измерителя скорости. Для обеспечения работоспособности ультразвукового измерителя скорости его датчики не должны располагаться в одной вертикальной плоскости, перпендикулярной направлению движения воды [5-7].
За один измерительный цикл ультразвуковой измеритель скорости определяет среднюю скорость местных потоков вдоль горизонтальной линии, проходящей через оба датчика. Поэтому датчики установлены на скользящей штанге у противоположных стенок водовода, чтобы учесть неравномерности скоростей местных потоков вдоль всей ширины потока. Если ультразвуковой измеритель скорости воды проводит измерения в разных точках водовода вдоль горизонтальной линии, соединяющей противоположные стенки водовода и перпендикулярной (нормальной) к направлению движения потока воды, то полученные величины скоростей будут различными, так как реальному потоку воды присущи неравномерные скорости течений. Чтобы определить значение средней скорости в разных горизонтальных плоскостях сечения водовода, скользящую штангу с датчиками необходимо перемещать в вертикальной плоскости водовода. Самой простой реализацией такого смещения является непрерывное перемещение скользящей штанги с постоянной скоростью, которое называют растровым сканированием.
Выбор скорости перемещения скользящей штанги должен удовлетворять следующим требованиям. С одной стороны, за счет снижения скорости перемещения скользящей штанги увеличивается количество измеренных местных скоростей потока. При этом создается информационный растр аналогично растру телевизионному. Действительно, высокочастотная развертка информационного растра обеспечивается высокой скоростью ультразвука в воде, а низкочастотная развертка обусловлена выбранной скоростью перемещения скользящей штанги. За счет создания информационного растра удается учесть весь спектр скоростей измеряемого потока, что приводит к увеличению точности измерения средней скорости потока и расхода воды в целом. С другой стороны, для выполнения большого количества измерительных операций потребуется значительное время измерений и может появиться дополнительная погрешность от временного изменения величины потока под действием внешних факторов. Поэтому скорость перемещения скользящей штанги выбирают такой, чтобы удовлетворить этим двум условиям.
Максимальная скорость перемещения скользящей штанги ограничена шириной диаграммы направленности датчиков и расстоянием между двумя датчиками. Под углом диаграммы (характеристики) направленности датчиков часто принимают угловую ширину главного максимума излучения по уровню 0,707, то есть по направлениям, соответствующим уровню 0,5 по мощности [7].
Из формулы (2) следует, что средняя скорость, измеренная ультразвуковым измерителем скорости, определяется интегрированием местных скоростей вдоль расстояния Х. В реальных условиях излучающая энергия датчика распространяется в объеме воды, ограниченном углами диаграммы направленности датчика, и показания ультразвукового измерителя скорости учитывают распределение местных скоростей потока воды в этом объеме. Если за один измерительный цикл скользящую штангу перемещать на величину не больше, чем ширина диаграммы направленности датчика, то будут учтены местные скорости потока по всему вертикальному сечению водовода. В противном случае работоспособность ультразвукового измерителя скорости может нарушаться. Поэтому скорость перемещения скользящей штанги выбирают такой, чтобы выполнить указанное требование.
Так как скорость перемещения скользящей штанги перпендикулярна скорости потока, то для диапазона измеряемых скоростей потока от нуля до максимальных значений может появиться дополнительная погрешность измерения потока воды, связанная с перемещением скользящей штанги в процессе измерения. Учесть величину этой погрешности возможно за счет коррекции результатов, полученных ультразвуковым измерителем скорости. Если скорость перемещения скользящей штанги поддерживается постоянной, то результат каждого измерения умножают на коэффициент, зависящий от отношения скорости перемещения скользящей штанги к скорости потока в горизонтальном сечении водовода. Для случая, когда измеренная скорость потока значительно больше скорости смещения скользящей штанги, корректирующий коэффициент стремится к единице. Для обратного соотношения скоростей корректирующий коэффициент стремится к нулю. Поэтому как результаты ультразвукового измерителя скорости, так и общей скорости потока, а следовательно, и расхода воды в целом, практически не зависят от величины скорости перемещения скользящей штанги.
По результатам большого количества измерений находится средняя скорость потока и расход воды в целом. В предложенном способе формула (3) определения расхода воды Q является формулой численного интегрирования, и при большом количестве Nу измерений точность определения расхода воды для потоков с неравномерными скоростями течений приближается к максимальной величине, определяемой формулой (1).
Новизна заявленного способа измерения расхода воды с неравномерными скоростями течений потока заключается в организации растрового сканирования площади водовода, обеспечивающего высокую точность измерения средней скорости потока, а следовательно, и расхода воды в целом за счет измерения местных скоростей потока воды по всей площади вертикального сечения водовода; в заявленном способе обеспечивается также независимость точности измерений расхода воды от величины скорости перемещения скользящей штанги с датчиками в вертикальном направлении; кроме того, для определения скорости воды по формуле (3) требуется малое время обработки результатов измерений, поскольку величина расхода Q вычисляется на основе простых арифметических операций над результатами измерений ультразвукового измерителя скорости.
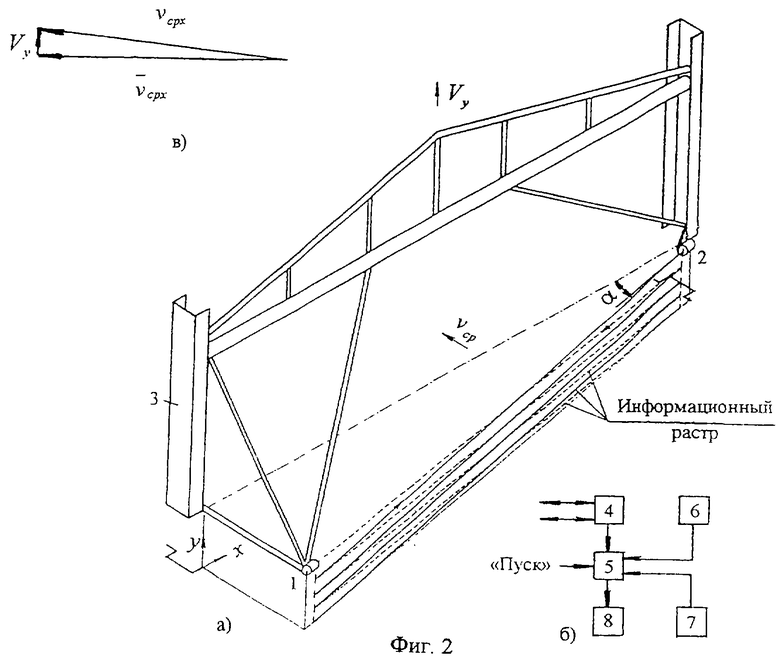
На фиг. 1 показана схема низконапорной гидроэлектростанции с прямоугольным измерительным сечением; в котором перемещается скользящая штанга. На фиг. 2 представлена скользящая штанга с установленными на ней в горизонтальном сечении датчиками (а), структурная схема устройства для измерения расхода воды по заявленному способу (б) и векторная диаграмма (в).
На структурной схеме предложенного измерителя расхода воды датчики 1 и 2 подключены к соответствующим входам-выходам ультразвукового измерителя скорости 4, выход которого связан с первым входом вычислительного блока 5, второй и третий входы блока 5 подключены соответственно к поверхностному датчику 6 и донному датчику 7, а выход блока 5 соединен с устройством индикации 8.
Устройство для измерения расхода воды работает следующим образом.
Если штанга 3, скользящая в вертикальных пазах на стенках водовода, находится в крайнем нижнем положении (на дне водовода), то во включенном состоянии окажется донный датчик 7. Когда на вычислительный блок 5 поступает команда "Пуск", начинается процесс измерения одновременно с запуском электролебедки или подъемного крана, за счет чего скользящая штанга 3 с датчиками 1 и 2 непрерывно поднимается вверх со скоростью Vу.
Пачки импульсов от ультразвукового измерителя скорости 4 излучаются одновременно навстречу друг к другу с помощью датчиков 1 и 2. Так как вертикальная плоскость расположения датчиков повернута на угол α относительно плоскости сечения водовода (нормальной к вектору vср), то из-за разной скорости распространения ультразвука в воде по потоку и против потока принятые сигналы датчиков 1 и 2 приходят с разными фазами. Они поступают на соответствующие входы-выходы ультразвукового измерителя скорости 4, в котором определяется сдвиг фаз между принятыми сигналами.
Если этот ультразвуковой измеритель скорости 4, реализующий операцию интегрирования (2), построен по схеме [6], то на его выходе формируется напряжение Uх, связанное со средней скоростью vсрх потока в горизонтальном сечении соотношением: Uх=k1•vcpx, где k1 - коэффициент пропорциональности, который не зависит от абсолютной скорости С ультразвука в воде. Каждую величину Ux оцифровывают в вычислительном блоке 5 по выражению: Ux=k2•Nx, где Nx - цифровой код величины Ux, k2 - коэффициент пропорциональности. Поэтому средняя скорость vcpx по координате х равна: vcpx=k2•Nx/k1. Чтобы каждое значение скорости vсрх не зависело от величины скорости Vy по координате у, выполняют коррекцию результатов по формуле: .
.
Тогда коэффициент k3, определяемый соотношением скоростей Vy и vcpx, находят из векторной диаграммы: .
.
Значения  , полученные в процессе сканирования водовода, суммируют в блоке 5, в нем подсчитывают также количество измерений Ny при движении штанги по координате у.
, полученные в процессе сканирования водовода, суммируют в блоке 5, в нем подсчитывают также количество измерений Ny при движении штанги по координате у.
После завершения процесса сканирования водовода срабатывает поверхностный датчик 6, и в вычислительном блоке 5 вычисляют среднюю скорость vcp потока как:
vcp=k2•∑(k3•Nx)/Ny•k1.
Расход воды Q в прямоугольном измерительном сечении водовода определяют методом площадь-скорость:
Q=S•k2•∑(k3•Nx)/Ny•k1,
где S - площадь водовода.
Результат измерений расхода воды, соответствующий выражению (3), выводят на устройство индикации 8.
Эффективность применения заявленного способа можно проиллюстрировать на примере измерения расхода воды в одном из трех водоводов гидроагрегата Новосибирской ГЭС. Для расчетов примем ориентировочно следующие параметры: ширина водовода Х= 6 м, высота водовода Y=12 м, скорость распространения ультразвука в воде С= 1500 м/с, средняя скорость течения в горизонтальном сечении водовода vcpx= 2,5 м/с, скорость сканирования водовода Vy=0,1 м/с, двойной угол диаграммы направленности датчиков β=2o.
Время Tx распространения пачки ультразвуковых импульсов от датчика 1 к датчику 2 и от датчика 2 к датчику 1 при Х=6 м и С=1500 м/с равно: Тx=4•10-3 c, а скользящая штанга с датчиками за время Tx смещается при Vy=0,1 м/с на очень малую величину: Δy=4•10-4 м. Можно считать, что диаграмма направленности датчиков ограничена конусом с основанием радиуса Rβ/2. Тогда при Х=6 м и β/2= 1o величина радиуса Rβ/2 равна: Rβ/2 = 0,1 м. Поэтому при условии Vy<<С выполняется соотношение: Δy<<Rβ/2, и датчики 1 и 2 при передвижении штанги вдоль координаты у всегда будут находиться в зоне взаимной видимости друг друга.
Так как отношение скоростей Vy/vcpx равно: Vy/vcpx=0,1/2,5=4•10-2=4%, то может появиться дополнительная погрешность от смещения скользящей штанги Δу за время каждого измерения ультразвуковым измерителем скорости. Поэтому при коррекции результатов измерений предложенным способом указанная величина погрешности устраняется, а полученный расход через гидрометрическое сечение водовода не зависит от величины Vy.
Для величины Y= 12 м время Тy сканирования водовода будет составлять всего: Тy=120 с. Для данных условий количество Ny измерений ультразвукового измерителя скорости окажется равным: Ny=30•103. Если погрешность измерений применяемого ультразвукового измерителя скорости составляет, например, δvcpx= 1%, то случайная погрешность δvcp измерения скорости потока не превышает [1]:
В большинстве случаев указанной величиной погрешности измерения скорости потока можно пренебречь и получить высокую повторяемость полученных результатов измерений. Полная погрешность измерения расхода воды с неравномерными скоростями течений потока заявленным способом определяется в основном погрешностью определения площади водовода и может составлять 0,1÷0,2%. Результат измерения расхода воды можно получить практически через 2 минуты после начала процесса сканирования водовода, так как не требуется трудоемких операций обработки результатов измерений.
Отсюда следует, что заявленный способ измерения расхода в гидротехнических сооружениях обладает высокими техническими характеристиками и может найти широкое применение в технике измерений, в том числе при проведении тарировочных испытаний.
Источники информации
1. ГОСТ 8.439-81 "Расход воды в напорных трубопроводах. Методика выполнения измерений методом площадь-скорость". М.: Изд-во стандартов, 1985, с. 1, 2, 6, 8, 14, 28.
2. DE 4016529 C1, G 01 F 5/00, 1992.
3. SU 1651100 A1, G 01 F 1/00, 1991.
4. SU 1506278 А1, G 01 F 1/66, 1989.
5. Аш Ж. и др. Датчики измерительных систем. М.: Мир, т. 2, 1992, с. 157, 158.
6. SU 657255 A1, G 01 F 1/66, 1979.
7. Ультразвук /Под ред. И.П.Голямина. М.: Сов. Энциклопедия, 1979, с. 222.
Изобретение относится к области измерительной техники и может быть использовано для измерения воды в гидротехнических системах. Способ измерения расхода воды через гидрометрическое сечение водовода включает использование ультразвуковых колебаний для измерения локальных скоростей потока и обработку полученных результатов. В ходе реализации способа перемещают вдоль вертикальной координаты сечения водотока сопряженные между собой по противоположным сторонам водовода электроакустические преобразователи с помощью подвижной каретки. Выбирают скорость перемещения такой, чтобы за время распространения ультразвуковых волн между стенками водовода перемещение каретки было значительно меньше геометрических размеров электроакустических преобразователей. Перемещают подвижную каретку непрерывно с постоянной скоростью, получают одновременно с этим интегральное значение скорости потока вдоль горизонтальных координат площади водовода с помощью ультразвукового измерителя. Проверяют в процессе сканирования водовода на достоверность полученные результаты измерений, суммируют неискаженные данные и подсчитывают количество просуммированных результатов измерений. Делят после окончания сканирования водовода для определения средней скорости потока суммарное значение результатов измерений ультразвукового расходомера на суммарное количество измерений, умножают для определения расхода воды полученный результат на фиксированную площадь водовода  где Q - расход воды водовода; S - площадь водовода; vcp - средняя скорость потока воды; Х - размер водовода вдоль координаты х; Nу - количество измерений, полученных при сканировании водовода вдоль координаты у; Vх - составляющая вектора скорости потока вдоль координаты х, нормальная к плоскости сечения водовода. Технический результат изобретения - повышение точности измерений при значительном сокращении времени измерительного процесса. 2 ил.
где Q - расход воды водовода; S - площадь водовода; vcp - средняя скорость потока воды; Х - размер водовода вдоль координаты х; Nу - количество измерений, полученных при сканировании водовода вдоль координаты у; Vх - составляющая вектора скорости потока вдоль координаты х, нормальная к плоскости сечения водовода. Технический результат изобретения - повышение точности измерений при значительном сокращении времени измерительного процесса. 2 ил.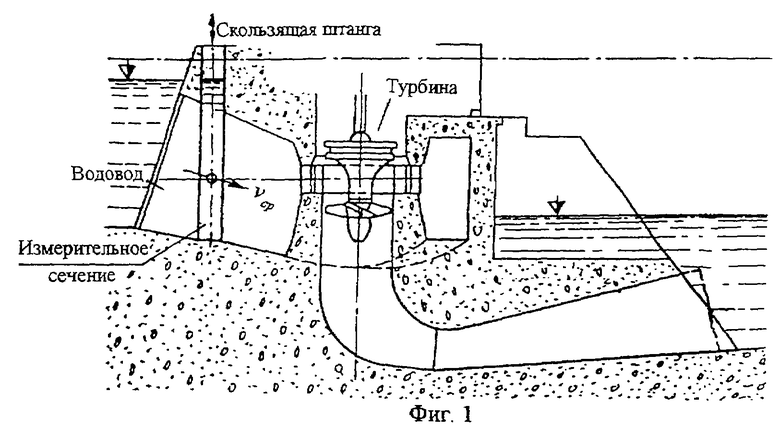
Способ измерения расхода воды через прямоугольное измерительное сечение водовода путем измерения гидродинамических параметров потока ультразвуковым измерителем скорости, в котором у противоположных стенок водовода на одной прямой в горизонтальной плоскости установлены два датчика ультразвукового измерителя скорости, причем эти датчики не должны располагаться в одной вертикальной плоскости, перпендикулярной направлению движения воды, отличающийся тем, что скользящую штангу с установленными на ней двумя датчиками ультразвукового измерителя скорости перемещают в вертикальной плоскости с такой постоянной скоростью, чтобы перемещение скользящей штанги за время каждого измерения скорости не превышало ширину диаграммы направленности датчиков, результаты измерений скорости потока воды корректируют с учетом величины скорости движения скользящей штанги, а расход воды через измерительное сечение водовода с неравномерными скоростями течений определяют через среднюю скорость потока по зависимости
где Q - расход воды через водовод;
S - площадь сечения водовода;
vср - средняя скорость потока воды;
Х - размер водовода вдоль координаты х,
Nу - количество измерений, полученных при сканировании водовода вдоль координаты у;
vх - составляющая вектора скорости потока вдоль координаты х, нормальная к плоскости сечения водовода.
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ ТЕЛЕЖЕК И ПОВОРОТА УСТАНОВЛЕННЫХ НА НИХ ИЗДЕЛИЙ | 0 |
|
SU165110A1 |
| DE 401652901, 07.11.1991 | |||
| Способ измерения расхода воды в реке | 1987 |
|
SU1506278A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО ИЗМЕРЕНИЯ РАСХОДА ЖИДКОСТИ | 1994 |
|
RU2100780C1 |
| RU 2064165, 20.07.1996. | |||

