Изобретение относится к измерительной технике и может быть использовано в устройствах и стационарных системах виброакустической диагностики технического состояния низкооборотных роторных машин на промышленных предприятиях и гидроэнергетических агрегатов электростанций и их базовых конструкций.
Известен вибрационный преобразователь, содержащий постоянный магнит, подвижную катушку с блоком управления перемещением ее в зазоре постоянного магнита, канал усиления и преобразования сигналов информации, электрический мост, состоящий из обмоток катушки и сопротивлений, где обмотки подвижной катушки включены в цепь регулятора тока в обмотках катушки, связанного с входом блока управления перемещением катушки, чем преследуется цель расширения частотного диапазона (А.с. 758032, М. Кл. G 01 V 1/16, 25.08.80).
Недостатком данного устройства является то, что встречное соединение обмоток катушки и их смещенное положение относительно поперечного сечения магнитного поля в его одном зазоре не создает линейности функции преобразования величины перемещения обмоток в магнитном поле в выходной сигнал преобразователя, а также не обеспечивает глубину смещения собственной частоты резонанса подвижной системы в область низких частот.
Наиболее близким техническим решением является устройство электродинамического сейсмоприемника, содержащего постоянный магнит, подвижную катушку с обмоткой, подвешенной на пружинах в его зазоре, и электронный преобразовательный блок. Его подвижная катушка снабжена дополнительной магнитной массой, расположенной в поле постоянного магнита, и датчиком ее положения в магнитном зазоре и относительно корпуса, выход которого через электронный преобразовательный блок соединен с обмоткой подвижной катушки и выходом сейсмоприемника, чем достигается получение сигнала, пропорционального виброперемещению, и частичное смещение его механического резонанса в область низких частот и обеспечивается независимость его ориентации по отношению к вертикали. (А.с. 855580, М. Кл. G 01 V 1/16, 15.12.81)
Недостатком данного устройства является то, что он не обеспечивает смещение его собственной резонансной частоты в область более низких частот и имеет нарушение линейности функции преобразования вибраций в выходной сигнал из-за влияния магнитной массы, что не позволяет его использовать в качестве датчика для контроля технического состояния низкооборотных машин и энергетических агрегатов гидроэлектростанций.
Данное устройство имеет невысокий технический уровень, обусловленный наличием дополнительной магнитной массы, установленной на подвижной катушке и расположенной в поле неподвижного постоянного магнита, где величина компенсации сил упругости пружин подвеса катушки и датчика ее виброперемещения не контролируется структурой электронного преобразовательного блока и позиционно регулируется вращением установочного винта в процессе изготовления. Ограниченность области компенсации не обеспечивает устойчивости работы сейсмоприемника и достаточной для целей вибродиагностики линейности его амплитудно-частотной характеристики. Использование пьезоэлектрических устройств для измерения виброперемещений требует применения в их электронных устройствах структур двойного интегрирования, что в области низких частот вносит неприемлемые существенные искажения.
Важнейшей задачей в области техники измерения вибраций на низкооборотных роторных машинах и энергетических агрегатах гидроэлектростанций, для виброакустической диагностики их технического состояния, является создание электродинамического устройства с системой контроля виброперемещений с автоматическим смещением собственной резонансной частоты в область более низких частот, без интегрирования вибросигналов, преобразуемых в выходной электрический сигнал датчиком, объединенным с постоянным магнитом, закрепленным на центрирующих пружинах в его корпусе с возможностью перемещения относительно оси неподвижной катушки, и связанного с ним электронного блока, включающего структуру устройств автоматического регулирования тока и действия электродинамических сил обмоток катушки на компенсацию сил упругости центрирующих пружин подвеса постоянного магнита, что позволит получать смещение рабочего диапазона чувствительного элемента в область более низких частот относительно нижнего частотного предела измерений, а также отвечать условию установки чувствительного элемента на объекте виброконтроля в любой его ориентации по отношению к направлению действия силы тяжести и с представлением результатов биполярным выходным сигналом напряжения постоянного тока.
Техническим результатом заявленного устройства является создание новой структуры устройства для непосредственного измерения виброперемещений в области низких частот, включающего электродинамическую систему с подвижной инертной массой и электронный преобразовательный блок, снабженный устройствами, обеспечивающими автоматическое смещение ее собственной частоты резонанса и всего рабочего диапазона измерений в область низких частот, путем компенсации сил упругости ее пружин подвеса с коррекцией степени демпфирования и автоматического центрирования, независимо от направления действия на нее силы тяжести, и с представлением результатов биполярным выходным сигналом напряжения постоянного тока.
Использование новой структуры в конструкциях устройств для низкочастотных виброизмерений с применением в них типовых компонентов должно обеспечивать их промышленное тиражирование и широкое использование заявленного устройства для измерения вибраций в автоматизированных системах виброконтроля и диагностики технического состояния низкооборотного технологического оборудования и энергетических агрегатов гидроэлектростанций.
Указанный технический результат достигается тем, что устройство для измерения вибраций, содержащее корпус чувствительного элемента с размещенными в нем постоянным магнитом и катушкой с обмотками, и электронный преобразовательный блок, где в корпусе чувствительного элемента установлен датчик виброперемещений, объединенный с постоянным магнитом, закрепленным в нем на центрирующих пружинах с возможностью перемещения относительно оси неподвижной катушки, и выполненный в виде двух обмоток, индуктивно связанных между собой, одна из которых замкнута накоротко и жестко закреплена между полюсами постоянного магнита, а вторая закреплена на катушке в виде двух симметрично расположенных секций, выходы которых введены в электронный преобразовательный блок и в его входной преобразователь, соединенный с выходом и с резистивным мостом, снабженным терморезистором, конструктивно совмещенным с нагревателем, где одна диагональ резистивного моста соединена с выходом входного преобразователя, а другая соединена со входом операционного усилителя, выход которого через сумматор и усилитель тока соединен с обмотками катушки, и на выход входного преобразователя включен усилитель с передаточной функцией апериодического звена, а его выход соединен со входом звена задания зоны нечувствительности, выход которого местной обратной связью соединен с нагревателем терморезистора резистивного моста, образующего звено регулирования тока и действия электродинамических сил обмоток катушки на компенсацию сил упругости центрирующих пружин подвеса постоянного магнита и смещение рабочего диапазона чувствительного элемента в область низких частот, а для подготовки и коррекции переходных процессов регулирования выход входного преобразователя параллельно соединен через интегрирующее и дифференцирующее звенья со входами сумматора.
Сущность предложенного устройства состоит в том, что измерение вибрации, посредством использования электродинамического устройства, происходит непосредственно, без интегрирования вибросигналов, по параметру виброперемещений, преобразуемых в выходной электрический сигнал датчиком, объединенным с постоянным магнитом, закрепленным на центрирующих пружинах в его корпусе с возможностью перемещения относительно оси неподвижной катушки и связанным с ним электронным блоком, включающего новую структуру устройств автоматического регулирования тока и действия электродинамических сил обмоток катушки на компенсацию сил упругости центрирующих пружин подвеса постоянного магнита, что позволяет получать смещение рабочего диапазона чувствительного элемента в область более низких частот относительно нижнего частотного предела измерений, а также линейность и стабильность амплитудно-частотной характеристики измерительного устройства и отвечает условию установки чувствительного элемента на объекте виброконтроля в любой его ориентации по отношению к направлению действия силы тяжести и с представлением результатов биполярным выходным сигналом напряжения постоянного тока.
Новая структура устройства автоматического регулирования включает резистивный мост, снабженный терморезистором, конструктивно совмещенным с его нагревателем, где одна диагональ резистивного моста соединена с выходом входного преобразователя, а другая соединена со входом операционного усилителя, выход которого соединен со входом сумматора, и при этом ее цепь управления содержит присоединенный к выходу входного преобразователя усилитель с передаточной функцией апериодического звена, а его выход соединен со входом звена задания зоны нечувствительности, соединенного выходом с нагревателем терморезистора резистивного моста, автоматически регулирующего компенсацию действия сил упругости центрирующих пружин подвеса подвижной части электродинамической системы, снабженной датчиком виброперемещения, и смещение частоты механического резонанса и рабочего диапазона чувствительного элемента в область низких частот, а также линейность и стабильность его амплитудно-частотной характеристики и при любой его ориентации по отношению к направлению действия сил тяжести и с представлением результатов биполярным выходным сигналом напряжения постоянного тока.
Особенность применения в новой структуре резистивного моста с терморезстором состоит в том, что он у порога своего баланса воздействует на изменение глубины и знака вводимой через него той главной составляющей обратной связи, которая позволяет автоматизировать поиск экстремальной величины, которая обеспечивает минимизацию суммарного действия силы, создаваемой электродинамической системой и силы упругости центрирующих пружин подвеса инертной массы чувствительного элемента, а также выполняет компенсацию действия на нее силы тяжести.
Проведенный заявителем анализ по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволяет установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существующим признакам заявленного изобретения, а определение из перечня выявленных аналогов прототипа, как наиболее близкого по совокупности признаков аналога, позволил выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков в заявленном объекте, изложенных в формуле изобретения.
Следовательно, заявленное изобретение соответствует требованию "новизна" по действующему законодательству.
Для проверки соответствия заявленного изобретения требованиям изобретательского уровня заявитель провел дополнительный поиск известных решений с целью выявления признаков, совпадающих с отличными от признаков прототипа признаками заявленного изобретения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники.
Следовательно, заявленное изобретение соответствует требованию "изобретательский уровень".
Устройство для измерения вибраций изображено на: фиг.1 - устройство чувствительного элемента с датчиком виброперемещения; на фиг.2 - структурная схема заявленного устройства с раскрытым содержанием возможных вариантов построения его элементов.
Сущность устройства для измерения вибраций состоит в том, что оно содержит корпус 1 (фиг.1) чувствительного элемента с размещенным в нем постоянным магнитом 2 и катушкой 3 с обмотками 4, и электронный преобразовательный блок 5 (фиг.2). В корпусе 1 чувствительного элемента установлен датчик виброперемещений, объединенный с постоянным магнитом 2 (фиг.1), закрепленный в корпусе 1 чувствительного элемента на центрирующих пружинах 6 с возможностью перемещения относительно оси неподвижной катушки 3. Здесь жесткость центрирующих пружин 6 исключает радиальное перемещение постоянного магнита 2 при произвольном расположении корпуса 1 чувствительного элемента относительно направления действия сил тяжести. Для обеспечения системы контроля виброперемещений датчик виброперемещений выполнен в виде двух обмоток 7 и 8. Обмотка 7 закреплена на постоянном магните 2 между его полюсами 9 и замкнута накоротко, а обмотка 8 расположена на неподвижной катушке 3 и выполнена в виде двух симметрично расположенных секций, выходы которых введены в электронный преобразовательный блок 5 (фиг.2) и включены на вход входного преобразователя 10, выполняющий преобразование отношения индуктивных сопротивлений секций обмотки 8 в биполярный сигнал напряжения постоянного тока. Его выход соединен с выходом 11 электронного преобразовательного блока 5 и с расположенным в нем резистивным мостом 12, снабженным терморезистором 13, конструктивно совмещенным с нагревателем 14, где одна диагональ резистивного моста соединена с выходом входного преобразователя 10, а другая соединена со входом операционного усилителя 15. Его выход через сумматор 16 и усилитель тока 17 соединен по цепи главной обратной связи с обмотками 4 катушки 3. Кроме того, на выход входного преобразователя 10 включена цепь управления резистивным мостом 12, содержащая усилитель 18, с передаточной функцией апериодического звена, где его выход соединен со входом звена задания зоны нечувствительности 19. Его выход местной обратной связью 20 соединен с нагревателем 14 терморезистора 13 резистивного моста 12, образующего динамическое звено регулирования тока и действия электродинамических сил обмоток 4 катушки 3 на компенсацию сил упругости центрирующих пружин 8 подвеса постоянного магнита 2 и обеспечивающего смещение собственной резонансной частоты в рабочем диапазоне чувствительного элемента в область низких частот. Для подготовки и коррекции переходных процессов регулирования выход входного преобразователя параллельно соединен через интегрирующее звено 21 и дифференцирующее звено 22 со входами сумматора 16, являющимися динамическими звеньями в полной новой структуре устройства регулирования.
Устройство для измерения вибраций работает следующим образом.
Корпус 1 чувствительного элемента, устанавливаемый на контролируемом объекте, воспринимает его вибрации, и датчик с короткозамкнутой обмоткой 7 и постоянным магнитом 2, представляющие собой инертную массу, стремятся к сохранению состояния покоя и совершают относительное колебательное движение в катушке 3, неподвижно закрепленной в корпусе 1 чувствительного элемента. Симметричная двухсекционная обмотка 8 датчика получает питание током высокой частоты от входного преобразователя 10, положение обмотки 7 относительно обмотки 8 воздействует на изменение отношения индуктивных сопротивлений ее двух секций, которое соответствует мгновенному положению подвижной системы чувствительного элемента. Величина приращения отношения индуктивных сопротивлений обмотки 8 линейно преобразуется во входном измерительном преобразователе 10 в его выходной биполярный сигнал напряжения постоянного тока, который поступает на выход 11 электронного преобразовательного блока 5 и параллельно на входы каналов, содержащих интегрирующее звено 21, дифференцирующее звено 22 и резистивный мост 12 со связанными с ним звеньями и далее через сумматор 16 и усилитель тока 17 по цепи главной обратной связи на обмотки 4 катушки 3, индуктивно связанной с постоянным магнитом 2.
Первый канал, содержащий интегрирующий усилитель 21, подготавливает процесс регулирования, он интегрирует поступающий от входного преобразователя 10 сигнал ошибки положения постоянного магнита 2 относительно оси ОХ, лежащей в плоскости симметрии обмоток 4, и преобразует его в выходной сигнал, который, проходя через сумматор 16 и усилитель тока 17 в обмотки 4, перемещает чувствительный элемент и постоянный магнит 2 их магнитным полем к центру обмоток до совпадения их плоскости симметрии с осью ОХ, где сигнал ошибки на выходе входного преобразователя 10 обращается в нуль и фиксирует при этом величину выходного сигнала интегрирующего звена 21 и, соответственно, полученное центральное положение постоянного магнита 2 для любой заданной ориентации его оси относительно вертикали. Выполнение функции чистого интегрирования в интегрирующем звене 21 обеспечивает высокую точность положения постоянного магнита 2 относительно оси ОХ в катушке 3. Вибрации, передаваемые на корпус 1 чувствительного элемента (фиг.1) и преобразуемые во входном преобразователе 10 (фиг.2) в электрические сигналы, при интегрировании усредняются и не нарушают среднего во времени зафиксированного центрального положения постоянного магнита 2.
Второй канал, содержащий дифференцирующий усилитель 22, обеспечивает требуемую степень демпфирования переходных процессов по параметру виброскорости. Здесь сигналы, вызываемые перемещениями постоянного магнита 2, дифференцируются и, проходя через сумматор 16 и усилитель тока 17 в обмотки 4, создают составляющую магнитного поля, демпфирующую скорость перемещения постоянного магнита 2 в переходных процессах при воздействиях на корпус 1 чувствительного элемента высокочастотных составляющих виброперемещений. Заданием параметров цепей дифференцирующего звена 22 регулируют степень демпфирования и частотный предел на ее выполнение. Введенный в цепь обмоток 4 усилитель тока 17 исключает влияние их индуктивных сопротивлений на фазовые смещения сигналов и обеспечивает формирование электродинамических сил, действующих на постоянный магнит 2 без фазовых искажений.
Сигналы, вызываемые статическими и динамическими перемещениями датчика чувствительного элемента с постоянным магнитом 2 относительно оси ОХ его центрального положения, параллельно поступают на вход третьего канала на входную диагональ резистивного моста 12 для автоматического снижения частоты механического резонанса чувствительного элемента. Сигналы, поступающие с его другой диагонали, усиливаются в операционном усилителе 15, снабженном жесткой обратной связью, и без искажений через сумматор 16, усилитель тока 17 и обмотки 4 катушки 3 воздействуют на постоянный магнит 2. Здесь усилитель тока 17 также исключает влияние индуктивных сопротивлений обмоток 4 на форму и фазу поступающего в них сигнала тока, что обеспечивает безинерционность компенсирующих силовых воздействий на динамику состояния датчика с постоянным магнитом 2.
В статическом состоянии постоянного магнита 2, уравновешенном действием только первого канала с интегрирующим звеном 21, резистивный мост 12 настраивают так, что при возбуждении на корпусе 1 чувствительного элемента механических вибраций и соответствующих им колебаний постоянного магнита 2 относительно оси ОХ ток в обмотках 4 создает приращения магнитного поля, противодействующие динамическим составляющим сил упругости его центрирующих пружин 6 и несколько превосходящие их. В этом случае возникает потеря устойчивости в положении датчика чувствительного элемента с постоянным магнитом 2 относительно оси ОХ, и они, даже при малом внешнем возмущающем воздействии, будут стремиться к дальнейшему выходу из этого положения. Однако ветвью канала, содержащей усилитель 18 с передаточной функцией апериодического звена 1-го порядка, воспринимается имеющий место в рассматриваемом случае замедленный выход чувствительного элемента из центрального положения, что вызывает превышение сигнала на выходе усилителя 18 над зоной нечувствительности звена задания зоны нечувствительности 19, и тогда нагрев нагревателя 14, по местной цепи обратной связи 20, приводит к изменению величины сопротивления терморезистора 13 и состояния резистивного моста 12. В результате, напряжение на входе операционного усилителя 15 снижается (или даже кратковременно изменяется его полярность) и его выходной сигнал, избыточно действующий на компенсацию сил упругости центрирующих пружин 6, падает, что вызывает переход системы "инертная масса - упругость центрирующих пружин" из неустойчивого состояния в устойчивое, которое сопровождается возвращением чувствительного элемента с постоянным магнитом 2 в требуемое положение на оси ОХ, что достигается также путем совместного действия интегрирующего звена 21. Поскольку силы упругости центрирующих пружин 6 и компенсирующие их силы электродинамической системы, воздействующие на инертную массу чувствительного элемента с постоянным магнитом 2, в этом состоянии почти взаимно уравновешены, то собственная частота колебаний в системе "инертная масса - упругость центрирующих пружин" минимизируется и, следовательно, рабочий частотный диапазон чувствительного элемента смещается в область низких частот, что обеспечивает постоянство и линейность его амплитудно-частотной характеристики в широком низкочастотном диапазоне измерений вибрации, и автоматического регулирования компенсации действия сил упругости центрирующих пружин электродинамической системы.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании изобретения следующей совокупности условий:
- устройство для измерения вибраций, воплощающее заявленное изобретение для преобразования механических виброперемещений в пропорциональные им электрические сигналы, обеспечивает расширение частотного диапазона чувствительного элемента в область низких частот путем выполнения в процессе измерений автоматической компенсации сил упругости центрирующих пружин подвеса подвижной инертной массы чувствительного элемента и автоматического перемещения чувствительного элемента в его рабочее центральное положение, что позволяет получать при его использовании постоянство и линейность амплитудно-частотной характеристики в широком низкочастотном диапазоне измерения вибрации при любой ориентации оси чувствительного элемента к направлению действия силы тяжести;
- для заявленного изобретения в том виде, как оно охарактеризовано в формуле изобретения, подтверждена возможность его осуществления с помощью вышеуказанных конструктивных решений и способов их реализации;
- устройство для измерения вибраций, воплощенное в заявленном изобретении, при его осуществлении способно обеспечить достижение усматриваемого заявителем технического результата.
Следовательно, заявленное изобретение соответствует требованию "Промышленная применимость".
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ ПРОСТРАНСТВЕННЫХ ВИБРАЦИЙ | 2010 |
|
RU2454644C1 |
| УСТРОЙСТВО ДЛЯ ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ МАШИН | 1997 |
|
RU2125248C1 |
| МЕХАНИЗМ КОТОВСКОВА БЛОКИРОВКИ ДИФФЕРЕНЦИАЛОВ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2221949C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2001 |
|
RU2200306C2 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ КОМПАРАТОР НАПРЯЖЕНИЯ, ТОКА И МОЩНОСТИ | 2007 |
|
RU2351938C1 |
| Устройство для измерения параметров вибрации | 1976 |
|
SU630532A1 |
| РЕЛЕ СКОРОСТИ ВЕТРА | 1995 |
|
RU2093835C1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ КОМПАРАТОР НАПРЯЖЕНИЯ, ТОКА И МОЩНОСТИ | 2009 |
|
RU2414716C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1994 |
|
RU2085012C1 |
| УСТРОЙСТВО ДЛЯ ПРОФИЛОМЕТРИИ РУЛОННЫХ И ЛИСТОВЫХ ИЗДЕЛИЙ | 1998 |
|
RU2153646C2 |

Изобретение относится к измерительной технике и может быть использовано для вибродиагностики технического состояния низкооборотных энергетических агрегатов гидроэлектростанций и их базовых конструкций. Устройство имеет датчик виброперемещений, объединенный с чувствительным элементом электромагнитной системы. Сигнал с выхода входного преобразователя подается на интегрирующий, дифференцирующий и апериодический усилители и на вход резистивного моста. Резистивный мост имеет терморезистор в одном из его плеч. Терморезистор совмещен с нагревателем. Выход апериодического усилителя через звено задания зоны нечувствительности соединен с нагревателем. Суммарный сигнал с выходов дифференцирующего и интегрирующего усилителей и резистивного моста подается в обмотки электродинамической системы чувствительного элемента. Техническим результатом является способность устройства к автоматическому смещению собственной резонансной частоты и всего диапазона измерений в область низких частот. Автоматическое центрирование и коррекция степени демпфирования происходят независимо от направления действия силы тяжести на чувствительный элемент. 2 ил.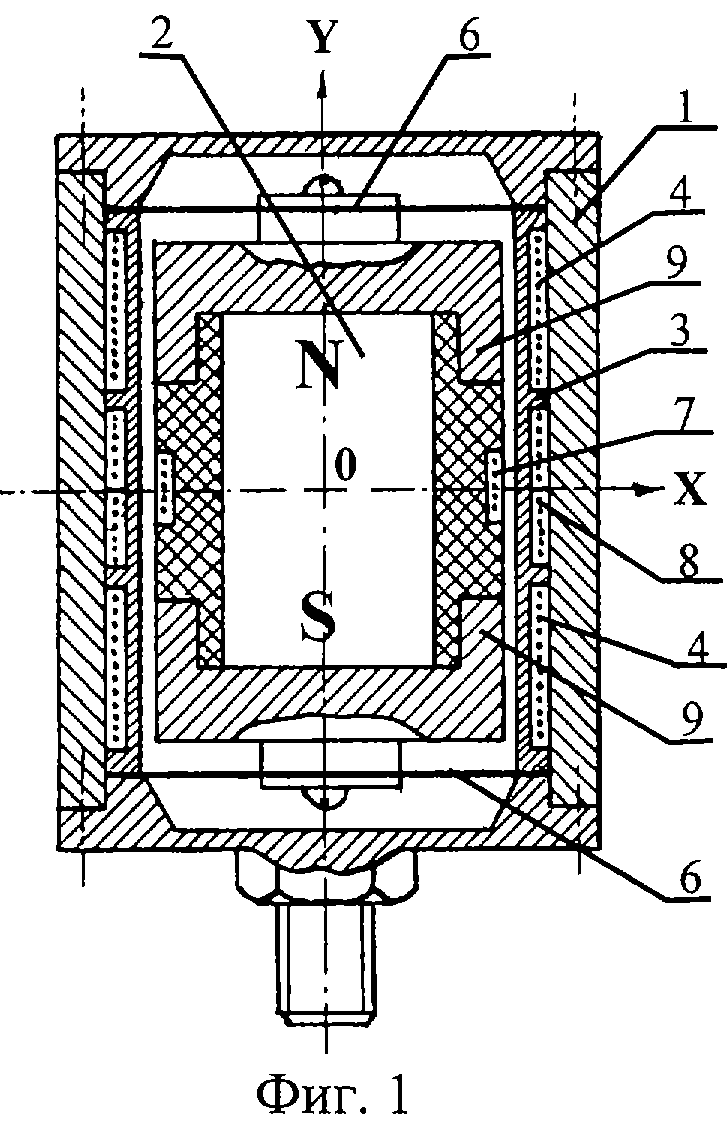
Устройство для измерения вибраций, содержащее корпус чувствительного элемента с размещенными в нем постоянным магнитом и катушкой с обмотками электродинамической системы чувствительного элемента, и электронный преобразовательный блок, отличающееся тем, что в корпусе чувствительного элемента установлен датчик виброперемещений, объединенный с постоянным магнитом, закрепленным в нем на центрирующих пружинах с возможностью перемещения относительно оси неподвижной катушки, и выполненный в виде двух обмоток, индуктивно связанных между собой, одна из которых замкнута накоротко и жестко закреплена между полюсами постоянного магнита, а вторая закреплена на катушке с обмотками электродинамической системы чувствительного элемента и выполнена в виде двух симметрично расположенных секций, выходы которых введены в электронный преобразовательный блок и в его входной преобразователь, соединенный с выходом и с резистивным мостом, снабженным терморезистором, конструктивно совмещенным с нагревателем, где одна диагональ резистивного моста соединена с выходом входного преобразователя, а другая соединена со входом операционного усилителя, выход которого через сумматор и усилитель тока соединен с обмотками электродинамической системы чувствительного элемента, на выход входного преобразователя включен также усилитель с передаточной функцией апериодического звена, а его выход соединен со входом звена задания зоны нечувствительности, выход которого местной обратной связью соединен с нагревателем терморезистора резистивного моста, образующего звено регулирования тока и действия электродинамических сил обмоток электродинамической системы чувствительного элемента на компенсацию сил упругости центрирующих пружин подвеса постоянного магнита и смещение рабочего диапазона чувствительного элемента в область низких частот, а для подготовки и коррекции переходных процессов регулирования выход входного преобразователя параллельно соединен через интегрирующее и дифференцирующее звенья со входами сумматора.
| Электродинамический сейсмоприемник | 1979 |
|
SU855580A1 |
| SU 758032 A, 25.08.1980. | |||

