1
Изобретение относится к измерительной технике, применяемой в сейс . моразведке. Кроме того, оно может быть использовано в сейсмических изысканиях при проведении трехкомпонентных наблюдений или наблюдениях при различных заданных углах наклона .сейсмоприемника относительно вертикали.
Известен электродинамический сейсмоприемник, содержащий подвижную катушку, подвешенную на пружинах в кольцевом зазоре постоянного магнита, имеющего частотную характеристику с резко выраженным механическим резонансом на собственной частоте колебаний механической система, с крутьин спадом (свыше 60 дБ/дек) в области частот ниже резонансной и подъемом (около 20 дБ/дек) на частотах выше .. резонансной Сейсмоприемник, обладающий такой частотной характеристикой, вносит большие искажения в результаты наблнвдений. Частичное уменьшение искажений достигают путем введения в сейсмический канал активных или пассивных фильтров, что увеличивает сложность сейсмической аппарату.ры. Наиболее эффективное уменьшение амплитудно-фазовых искажений в диапазоне частот сейсмического сигнала дает смещение резонансной частоты подвижной катушки сейсмоприемника в Область низких частот .и преобразование в выходной электрический сигнгш не параметра скорости перемещения катушки в магнитном поле, а параметра величины ее перемещения относительно корпуса сейсмоприемника.
10
Известен электродинамический сейсмоприемник, в котором для регулирования его собственной частоты на корпусе и подвижной системе сейсмоприемника укреплены два обращенных
15 друг к другу разноименными полюсами постоянных магнита, зазор между полюсами которых регулируется f 2.
Недостаток этого устройства состоит в том, что установка в сейсмо20приемник двух дополнительных постоянных магнитов и механизма регулирования зазора между их полюсами сама по себе представляет значительные трудности. Затем, если ориентация от сей25смоприемника относитапьно вертикали меняется во времени, происходит нарушение равновесия между составляющими силы тяжести и силами взаимодействия этих магнитов, что, в конечном итоге,
30 приводит к нарушению регулировки и
равотоспособности сейсмоприемника. Кроме того, смещение резонансной частоты сейсмоприемника в область низких частот еще не обеспечивает исправление его амплнтудно фазовой частотной характеристики в диапазоне частот,ле,жащих выше резонансной.
Цель изобретения - упрощение конструкции сейсмоприемника, улучшение его частотных характеристик и повышение надежност1|.
Поставленная цель достигается тем что в электродинамическом сейсмоприемнике, содержащем корпус с жестко ..закрепленным на нем постоянным магнитом, подвижную катушку с обмоткой, подвешенную на пружинах в его кольцевом зазорами электронно-преобразовательный блок, подвижная катушка . снабжена дополнительной магнитной массой, расположенной в поле постоянного магнита,, и датчиком ее положения относительно корпуса, выход которого через электронно-преобразовательный блок соединен с обмоткой подвижной катушки и с выходами сейсмоприемника.
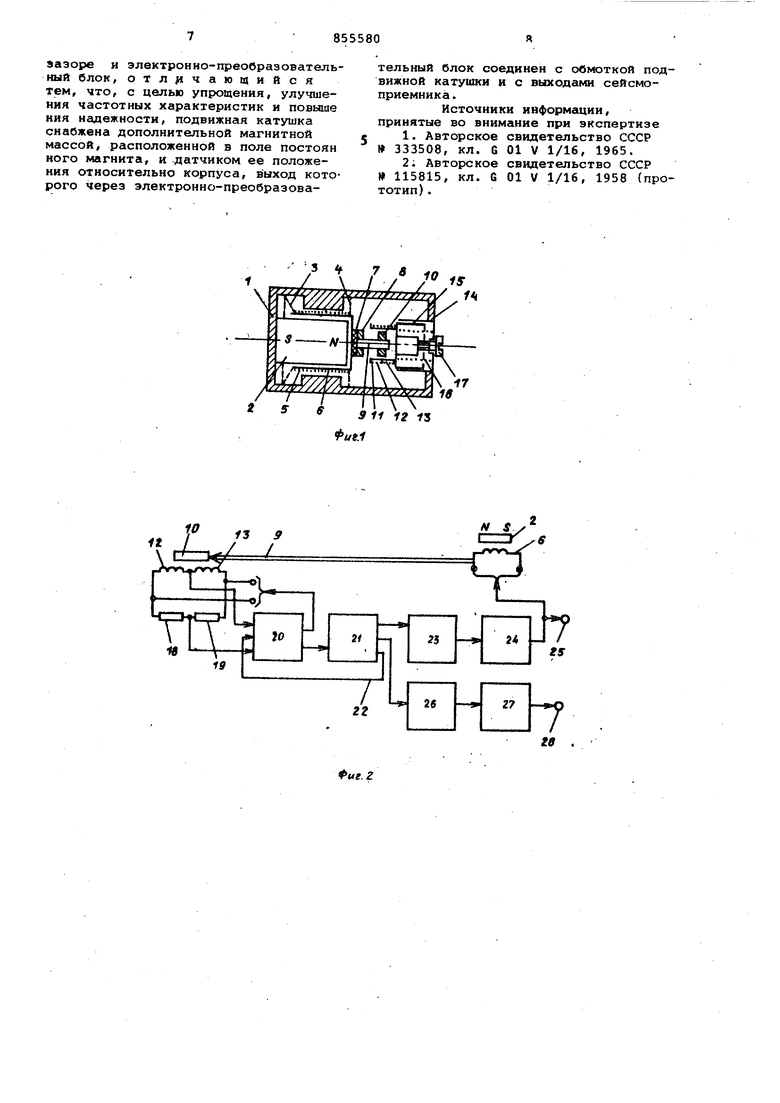
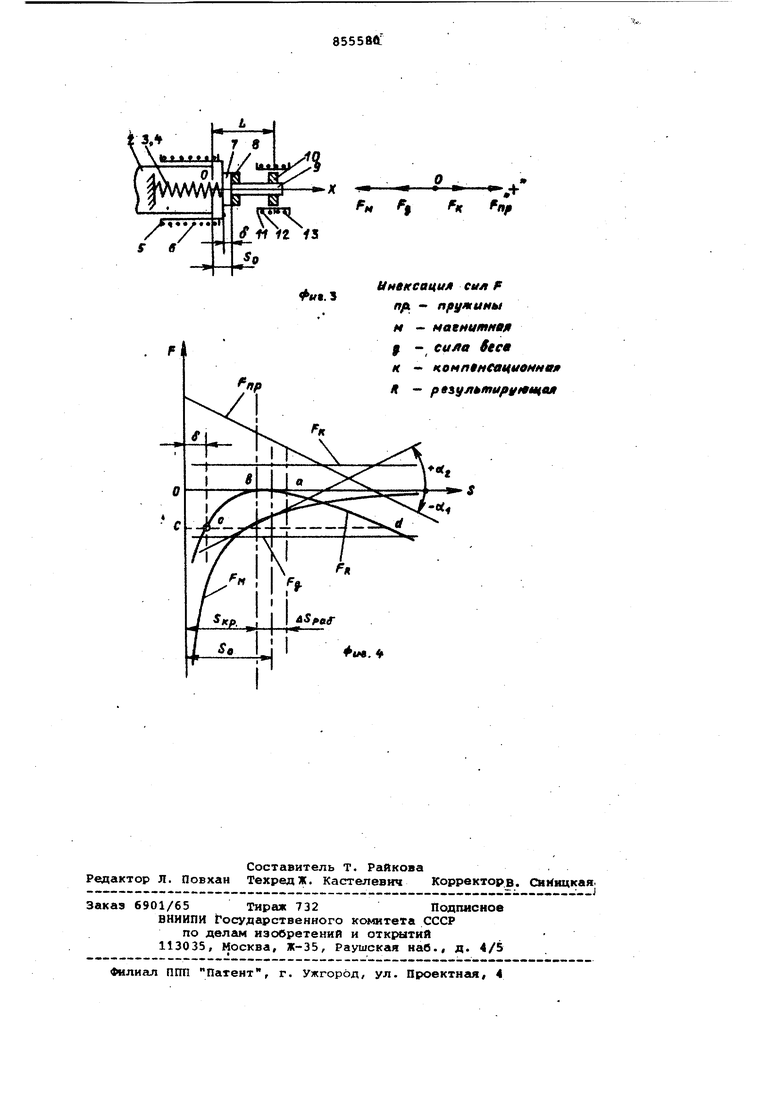
На фиг. 1 приведена схема конструкции сейсмоприемника; на фиг. 2 электрическая принципиальная схема устройства, совмещенная с функциональной схемой электронно-преобразовательного блока; на фиг. 3 - расчетная схема сил; на фиг. 4 - графики функций сил, действующих на колебательную систему в зависимости от расстояния между пассивной ферромагнитной массой и полюсом магнита. (
В корпусе 1 (фиг. 1) электродинамического сейсмоприемника установлен магнит 2. В кольцевом зазоре между корпусом и магнитом на ирисовых пружинах 3 и 4 закреплена подвижная катушка 5 с обмоткой 6. На катушке посредством прокладки 7 закреплена дополнительная магнитная масса 8 (ферритовое кольцо). На ней посредством диамагнитного стержня 9 закреплено второе ферромагнитное кольцо 10, являющееся сердечником датчика положений катушки 11 с обмотками 12 и 13, симметрично расположенными по ее длине. Катушка 11 закреплена на корпусе 1 посредством установочного механизма, содержащего направляющий цилиндр 14, гайку с гильзой 15, пружину 16 и регулировочный винт 17. Обмотки 12 и 13 (фиг. 2) совместно с сопротивлениями 18 и 19 образуют мрет,подключенный на вход-выход амплитудноуправляемого генератора 20, соединенного с нелинейным элементом 21. Эти узлы, охваченные внутренней, обратной связью 22, образуют схему преобразователя величины перемещения сердечника 10 в сигнсШ постоянного тока. Выход нелинейного элеме 1та 21 через интегратор 23 и усилитель 24 подключен к обмотке 6 подвижной катушки 5
сейсмоприемника и на первый вход 25 электронно-преобразовательного блока. Это выход соединен с внешним прибором (вольтметром), по которому контролируется ориентация оси сейсмоприемника относительно вертикали.
По второму кансшу выход нелинейного элемента 21 соединен с фильтром 26 низких частот, усилителем 27 и вторым выходом 28 блока. Этот выход соединен с внешним прибором (осциллографом) , регистрирукядим сейсмические колебания.
На расчетной схеме- (фиг. 3) вместо двух пружин 3 и 4, удерживающих катушку 5, показана одна условная пружина 3, 4. Толщиной cf прокладки 7 задают среднее исходное расстояние Sg между пассивной ферромагнитной массой 8 и полюсом магнита 2. Расстоянием L от полюса магнита 2 до плоскости симметрии обмоток 12 и 13 и сердечника 10 регулируют исходное положение катушки 5,и следовательно,величину зазора SQ .
Сейсмоприемник работает следующим образом.
В режиме отсутствия внешних колебаний любое отклонение сердечника 10 от плоскости симметрии обмоток 12 и 13 катушки 11 (фиг. 1) вызывает появление соответствукяцего сигнала на выходе нелинейного элемента 21. Этот сигнал после интегрирования его в интеграторе 23 с постоянной времени, намного превосходящей периоды ожидаемых сейсмических сигналов, н усиления в усилителе 24 поступает в обмотку 6 подвижной катушки. В результате катушка 5 перем цаетс в поле постоянного магнита 2 до совмещения середины длины сердечника с плоскостью симметрии обмоток 12 и 13 с точностью до бесконечно малой величины ошибки регулирования t . В случае изменения ориентации оси сейсмоприемника относительно вертикали получает изменение составляющая силы тяжести, действукедая на массу подвижной системы, и следовательно, изменяется сила тока в обмотке 6 подвижной катушки так, что ее исходное положение остается неизменным. По изменению напряжения (или тока), действующего в цепи обмотки 6,с помощью прибора, подключенного к первому выходу 25, контролируют ориентацию сейсмсприемника. Исходное положение подвижной системы в целом задают при этом смещением катушки 11 датчика путем вращения винта 17.
При вибрационном воздействии на Сейсмоприемник сигнал на выходе интегратора 23 не получает существенных изменений, и следовательно, условие статического равновесия система сохраняется. Однако переменная составляющая сигнала, возникающая на выходе нелинейного элемента 21, выделяется фильтром 26, усиливается в усилителе 27 и поступает на второй выхо 28 для регистрации.
Величина этого сигнала пропорциональна смещению сердечника 10 относительно его исходного положения, и следовательно, параметру перемещения корпуса сейсмоприемника в области частот, лежащих вьвие резонансной. 1 В сейсмоприемнике расширение этой Кэбласти частот получают смещением его собственной резонансной частоты механических колебаний в область низких частот,-что достигается введением пассивной ферромагнитной массы 8 в поле постоянного магнита 2 и соединением ее с катушкой 5. Поскольку метеду силой F притяжения массы 8 к полюсу магнита 2 и ее расстоянием до полюса S существует нелинейная функциональная зависимость (фиг. 4), то результирующая сила F , действующая на подвижную систему, представлена графиком функции F F(S) с переменHbw наклоном к оси OS, так как
где FM - сила притяжения массы 8 к .
полюсу магнита 2, F-Q - сила действия пружин подвески ,
Fa - осевая составляющая силы
тяжести,
F - компенсирующая сила, созда ваемая протеканием тока по
обмотке 6 катушки 5. Принимая во внимание, что силы F и Fy, в рассматриваемой области пе ремещений S не изменяют своей величи ны, то график функции Fj F(S) обязательно имеет экстремум в некоторой точке Ъ . Равновесие оси в точке Ь или в любой другой точке, принадлежа щей кривой Fn справа в области bd ,мо жет быть достигнуто регулированием тока в обмотке 6, и следовательно, силы Fj, .
j Собственная частота механической резонансной системы определяется соОтнсаиением:
:-{i
w,
pe-bl m
масса системы,
де m G упругость подвески, которая определяется крутизной FR. т.е..
dFR ---df
Таким образом, задавая винтом 17 (фиг. 1) исходное положение подвиж- 40 ной системе, получаем по первому каналу (фиг. 2) электронно-преобразовательного блока автоматическое регули-- рование баланса сил и закрепление положения рабочей точки. Так как крутизна кривой ( по модулю в интервв ле fad меньше крутизны и может приближаться к нулю, например в интервале Ьа , то следовательно, собственная частотаШрв меньше собственной J частоты сейсмоприемника, не снабженного пассивной ферромагнитной массой. Таким образом, вращением винта 17 (фиг.1) производят выбор рабочего участка на кривой F- и задают собст« венную резонансную частоту сейсмоприемника.
На участке кривой сЪ , где упругость с меняет свой знак, система теряет устойчивость. При этом положение S системы в точке b считается
5 критическим Syp.
Если рабочая точка Забыла выбрана в области S г 5кр ,то в случае воздействия непредусмотренных по величине возмущений, система может оказаться
0 в неустойчивой области. При этом она
под действием силы F, автоматически I .
переводится из точки с в точкус ,откуда затем по кривой возвращается в исходное состояние, и сейсмоприемник
5 .посстанавливает свою работоспособность.
Таким образом, благодаря введению пассивной магнитной массы в поле постоянного магнита и жесткого соединения ее с подвижной катушкой достигается упрощение конструкции сейсмоприемника и смещение его резонансной частоты в область низких частот, а введением датчика- положения магнитной
массы относительно корпуса и соединением его через электронно-преобразовательный блок с обмоткой подвижной катушки и со вторым выходом сейсмоприемника получают систему автоматической стабилизации положения подвижной катушки в магнитном зазоре, которая обеспечивает повышение надежности работы сейсмоприемника и преобразование в выходной сигнал параметра колебательного перемещения корпуса
5 сейсмоприемника . Последнее обстоятельство совместно с полученным смещением резонансной частоты в область низких частот улучшает частотную характеристику сейсмоприемникаг выравненную в рабочем диапазоне наблюдаемого спектра сейсмических колебаний. Кроме того, получение информгщии из канала автоматической стабилизации положения подвижной катушки дает возf можность контролировать ориентацию оси сейсмоприемника относительно вертикали.
Формула изобретения
Электродинамический сейсмоприемник, содержащий корпус с жестко закрепленным на нем постоянным магнитом, подвижную катушку с обмоткой, подвешенную на пружинах в его кольцевом
зазоре и электронно-преобразовательный блок, отличающийся тем, что, с целью упрощения, улучшения частотных характеристик и повыше ВИЯ надежности, подвижная катушка снабжена дополнительной магнитной массой, расположенной в поле постоян ного магнита, и датчиком ее положения относительно корпуса, выход которого через электронно-преобразовательный блок соединен с обмоткой подвижной катушки и с выходами сейсмоприемника.
Источники информгщии, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 333508, КЛ. G 01 V 1/16, 1965.
2; Авторское свидетельство СССР IP 115815, КЛ, G 01 V 1/16, 1958 (прототип) .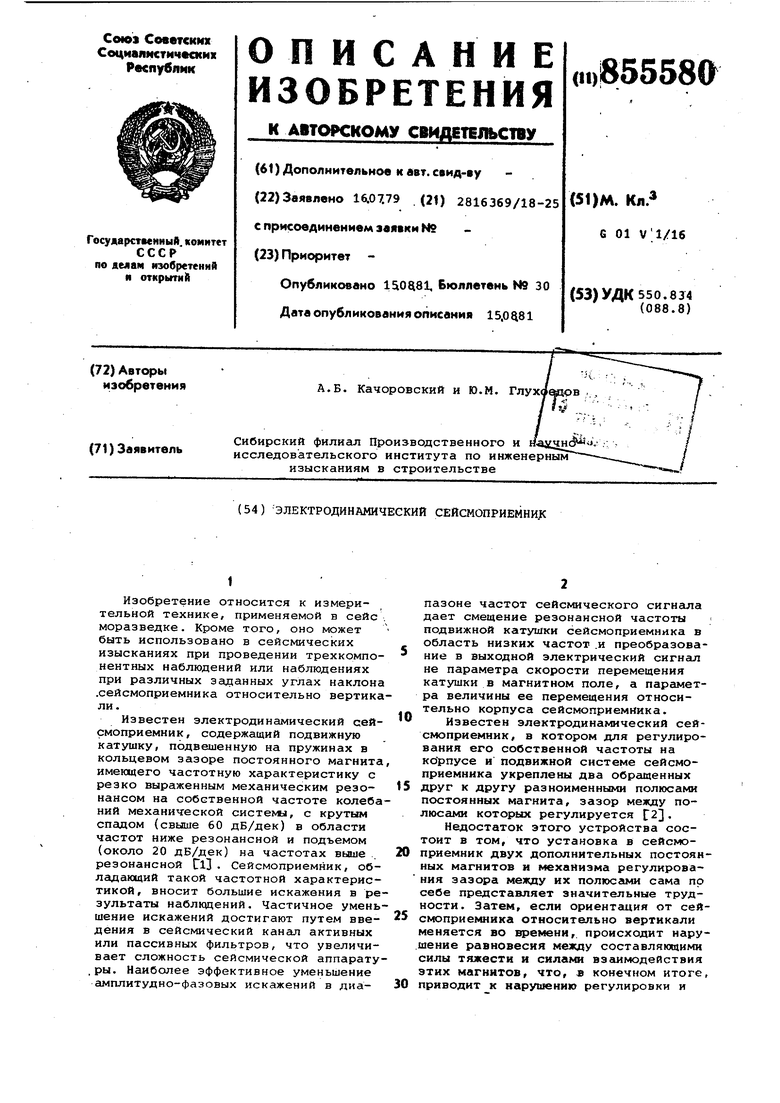


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2001 |
|
RU2207522C2 |
| Способ преобразования сейсмических сигналов и устройство для его реализации | 1976 |
|
SU623168A1 |
| Электродинамический преобразовательный блок сейсмоприемника ускорений | 1989 |
|
SU1720037A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1994 |
|
RU2057399C1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ СЕЙСМОПРИЕМНИК УСКОРЕНИЙ С НАИМЕНЬШИМ КОЭФФИЦИЕНТОМ НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ | 1999 |
|
RU2155358C1 |
| СЕЙСМОПРИЕМНИК УСКОРЕНИЙ | 1994 |
|
RU2098844C1 |
| ТЕСТЕР СЕЙСМОПРИЕМНИКОВ ЭЛЕКТРОДИНАМИЧЕСКИХ | 2017 |
|
RU2657116C1 |
| Электродинамический сейсмоприемник | 1979 |
|
SU918915A1 |
| СЕЙСМОПРИЕМНОЕ УСТРОЙСТВО | 1992 |
|
RU2054700C1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2046375C1 |
ZA/vf/
5
10
ff ftrttf r-.
9 ii 12 14
i/i.S
1Лв. «
- ,
PH t f faf
Ынвксацил сил F nfL - nfдлины H - HatHtiiHHeit f - ttee к - KOMn9ncattttOHHa Я р лулшян р1/19щал
