Изобретение относится к транспортному машиностроению, в частности к механизмам блокировки межосевого и межколесных дифференциалов транспортного средства повышенной проходимости с колесной формулой 4х4.
Известен механизм блокировки дифференциала транспортного средства, использованный в устройстве управления блокировкой дифференциала, содержащий одно блокирующее устройство, установленное на межосевом дифференциале, и другое блокирующее устройство, установленное на межколесном дифференциале заднего моста, датчики частот вращения всех четырех колес транспортного средства и исполнительный механизм (патент США 4874059, кл. В 60 К 17/34, 1989).
Недостатком этого механизма является, во-первых, то, что в качестве блокировочных устройств используются дисковые муфты, которые, блокируя соответствующие дифференциалы, лишают последних дифференциальных свойств, что ухудшает тягово-скоростные качества транспортного средства при повороте и движении по неровностям на дорогах с твердым покрытием и одинаковым сцеплением с поверхностью всех колес, во-вторых, то, что управление блокировкой осуществляется в зависимости от разности скоростей вращения колес, которая может образовываться не только в результате повышенного буксования части колесного движителя, когда нужно действительно блокировать соответствующий дифференциал, но и при повороте машины, когда блокировка дифференциала, лишающая его дифференциальных свойств, вредна, в-третьих, то, что отсутствует блокирующее устройство на межколесном дифференциале переднего моста, что будет снижать тяговые возможности переднего моста в случаях движения при ухудшенном сцеплении с опорной поверхностью одного из колес переднего моста, тем самым тягово-скоростные качества машины в целом будут снижаться.
Известен механизм блокировки дифференциала, использованный в самоблокирующемся дифференциале С.П.Пожидаева, содержащий первую гидромашину регулируемой производительности, один из двух взаимно проворачивающихся элементов которой кинематически связан с ведущим звеном дифференциала, и вторую гидромашину, один из двух взаимно проворачивающихся элементов которой связан с одним из выходных звеньев дифференциала, подсоединенную последовательно к первой гидромашине и образующую с ней замкнутый гидравлический контур (авт. св. СССР 759348, кл. В 60 К 17/20, F 16 H 1/44, 1980).
Недостатком этого механизма является, во-первых, то, что он обеспечивает блокировку лишь одного дифференциала, поэтому для обеспечения блокировки на транспортном средстве повышенной проходимости с колесной формулой 4х4 межосевого и двух межколесных дифференциалов потребуются три таких механизма, во-вторых, то, что при движении машины по прямой элемент, регулирующий производительность первой гидромашины, находится в нейтральном положении, предопределяя ее нулевую величину. Вследствие этого жидкость, находящаяся в ее полостях и трубопроводах, заперта и жестко связывает друг с другом взаимно проворачивающиеся элементы второй гидромашины. Проворачивание одного из взаимно проворачивающихся элементов этой гидромашины относительно другого возможно только в очень небольших пределах, обусловливаемых объемными утечками жидкости. В результате вторая гидромашина жестко блокирует дифференциал, лишая практически ведущие колеса возможности катиться по сколько-нибудь существенно неровной поверхности без скольжения и дополнительного буксования, и не обеспечивает тем самым повышение тяговых качеств дифференциала при одновременном сохранении его дифференциальных свойств, что ухудшает проходимость машины.
Известен механизм блокировки дифференциала транспортного средства, содержащий следящее устройство, выполненное в виде трех объемных гидропередач, каждая из которых имеет две гидромашины, последовательно соединенные между собой с образованием замкнутого гидравлического контура, причем первые гидромашины всех трех гидропередач выполнены регулируемыми, три зубчатых ряда постоянного зацепления, при этом первая гидромашина первой гидропередачи своим одним из двух взаимно проворачивающихся элементов соединена с ведомой шестерней первого зубчатого ряда, ведущая шестерня которого через вторую гидропередачу, второй зубчатый ряд кинематически связана с венцом ведомой шестерни зубчатой передачи для подвода ведущего момента к дифференциалу, а вторая гидромашина первой гидропередачи своим одним из двух взаимно проворачивающихся элементов кинематически связана с одним из выходных звеньев дифференциала, первая гидромашина второй гидропередачи своим одним из двух взаимно проворачивающихся элементов соединена с ведомой шестерней второго зубчатого ряда, ведущая шестерня которого кинематически связана с венцом ведомой шестерни зубчатой передачи для подвода ведущего момента к упомянутому дифференциалу, первая гидромашина третьей гидропередачи вместе с первой гидромашиной первой гидропередачи своими одними из двух взаимно проворачивающихся элементов через дифференциальную передачу связаны с ведомой шестерней третьего зубчатого ряда, ведущая шестерня которого кинематически связана с венцом ведомой шестерни зубчатой передачи для подвода ведущего момента к упомянутому дифференциалу, а вторая гидромашина третьей гидропередачи своим одним из двух взаимно проворачивающихся элементов кинематически связана с другим выходным звеном того же дифференциала (патент России 2156903, кл. F 16 H 48/30, В 60 К 17/16, 2000).
Недостатком этого механизма является, во-первых, то, что он обеспечивает блокировку лишь одного дифференциала, поэтому для обеспечения блокировки на транспортном средстве повышенной проходимости с колесной формулой 4х4 межосевого и двух межколесных дифференциалов потребуются три таких механизма, во-вторых, то, что хотя при движении по неровностям данный механизм обеспечивает возможность расширять диапазон работы дифференциала в дифференциальном режиме и в тем большей степени, чем выше неровности, наступление блокировки дифференциала в случае ухудшения сцепления с дорогой части движителя, связанной с одним из его выходных звеньев, будет происходить с опозданием и тем большим, чем шире установленный диапазон работы дифференциала в дифференциальном режиме, что будет приводить к потере скорости машины и ее производительности.
Известен механизм блокировки дифференциала транспортного средства, принятый в качестве прототипа, содержащий три зубчатых ряда постоянного зацепления, ведущая шестерня первого из которых кинематически связана с венцом ведомой шестерни зубчатой передачи для подвода ведущего момента к межколесному дифференциалу заднего моста, адаптирующее устройство, выполненное в виде двух объемных гидропередач, каждая из которых имеет две гидромашины, последовательно соединенные между собой с образованием замкнутого гидравлического контура, первые гидромашины которых выполнены регулируемыми, при этом орган регулирования первой гидромашины первой гидропередачи связан посредством первой дифференциальной передачи в виде двухплечего рычага с подпружиненным с двух сторон штоком первого гидроцилиндра управления, орган регулирования первой гидромашины второй гидропередачи связан посредством второй дифференциальной передачи в виде двухплечего рычага с подпружиненным с двух сторон штоком второго гидроцилиндра управления, причем первая гидромашина первой гидропередачи своим одним из двух взаимно проворачивающихся элементов соединена с ведомой шестерней первого зубчатого ряда, а ее вторая гидромашина своим одним из двух взаимно проворачивающихся элементов кинематически связана с одним из выходных звеньев межколесного дифференциала заднего моста, и первого и второго регулирующих устройств, обеспечивающих возможность регулирования давления жидкости в соответствующих полостях гидроцилиндров управления в зависимости от величин действительных скоростей соответственно первого и второго ведущих колес транспортного средства (патент России 2164478, кл. В 60 К 17/16, 2001).
Данный механизм обеспечивает управляемую блокировку дифференциала, не лишающую при этом его дифференциальных свойств.
Недостатком этого механизма является то, что он не может обеспечить одновременно с управляемой блокировкой межколесного дифференциала заднего моста управляемую блокировку межосевого дифференциала и межколесного дифференциала переднего моста транспортного средства повышенной проходимости с колесной формулой 4х4. В результате тягово-скоростные качества, проходимость, производительность и топливная экономичность такой машины будут снижаться.
Задача изобретения - создание механизма блокировки дифференциалов, обеспечивающего в случае ухудшения сцепления части колес с опорной поверхностью управляемую блокировку всех трех дифференциалов транспортного средства с колесной формулой 4х4, не лишающую при этом их дифференциальных свойств.
Технический результат - повышение тягово-скоростных качеств, проходимости, производительности и топливной экономичности.
Указанный технический результат достигается тем, что в механизме блокировки дифференциалов транспортного средства, содержащем три зубчатых ряда постоянного зацепления, ведущая шестерня первого из которых кинематически связана с венцом ведомой шестерни зубчатой передачи для подвода ведущего момента к межколесному дифференциалу заднего моста, адаптирующее устройство, выполненное в виде двух объемных гидропередач, каждая из которых имеет две гидромашины, последовательно соединенные между собой с образованием замкнутого гидравлического контура, первые гидромашины которых выполнены регулируемыми, при этом орган регулирования первой гидромашины первой гидропередачи связан посредством первой дифференциальной передачи с подпружиненным с двух сторон первым штоком, орган регулирования первой гидромашины второй гидропередачи связан посредством второй дифференциальной передачи с подпружиненным с двух сторон вторым штоком, причем первая гидромашина первой гидропередачи своим одним из двух взаимно проворачивающихся элементов соединена с ведомой шестерней первого зубчатого ряда, а ее вторая гидромашина своим одним из двух взаимно проворачивающихся элементов кинематически связана с одним из выходных звеньев межколесного дифференциала заднего моста, и первого и второго регулирующих устройств для выработки управляющих сигналов в зависимости от величин действительных скоростей соответственно первого и второго ведущих колес транспортного средства, ведущая шестерня второго зубчатого ряда кинематически связана с венцом ведомой шестерни зубчатой передачи для подвода ведущего момента к межколесному дифференциалу переднего моста, первая гидромашина второй гидропередачи своим одним из двух взаимно проворачивающихся элементов соединена с ведомой шестерней этого зубчатого ряда, а вторая гидромашина этой гидропередачи своим одним из двух взаимно проворачивающихся элементов кинематически связана с одним из выходных звеньев межколесного дифференциала переднего моста, адаптирующее устройство снабжено дополнительными третьей объемной гидропередачей, имеющей две гидромашины, последовательно соединенные между собой с образованием замкнутого гидравлического контура, первая из которых выполнена регулируемой и своим одним из двух взаимно проворачивающихся элементов соединенной с ведомой шестерней третьего зубчатого ряда, ведущая шестерня которого кинематически связана с венцом ведомой шестерни зубчатой передачи для подвода ведущего момента к межосевому дифференциалу, а вторая гидромашина этой гидропередачи своим одним из двух взаимно проворачивающихся элементов кинематически связана с одним из выходных звеньев указанного дифференциала, и третьим и четвертым регулирующими устройствами для выработки управляющих сигналов в зависимости от величин действительных скоростей соответственно третьего и четвертого ведущих колес, причем каждое из четырех регулирующих устройств выполнено в виде двух датчиков линейных скоростей перемещения соответствующего ведущего колеса в продольном и вертикальном направлениях, размещенных над этим колесом в продольно-вертикальной плоскости его симметрии, сумматора для геометрического суммирования сигналов от этих датчиков и усилителя выходного сигнала сумматора, один из двух выходов которого одновременно является выходом соответствующего регулирующего устройства, а другой его выход соединен с массой транспортного средства, при этом орган регулирования первой гидромашины третьей объемной гидропередачи связан посредством третьей дифференциальной передачи с третьим штоком, причем первый и второй штоки соединены соответственно с сердечником первого и сердечником второго электромеханических преобразователей, каждый из которых снабжен двумя обмотками, провода которых навиты вокруг соответствующих сердечников в противоположных друг другу направлениях, а третий шток соединен с сердечником третьего электромеханического преобразователя, снабженного четырьмя обмотками, провода первой и второй из которых навиты вокруг сердечника в одном направлении, а провода третьей и четвертой - в противоположном, при этом начало первого витка первой обмотки первого электромеханического преобразователя соединено с выходом первого регулирующего устройства, начало первого витка второй его обмотки соединено с выходом второго регулирующего устройства, начало первого витка первой обмотки второго электромеханического преобразователя соединено с выходом третьего регулирующего устройства, начало первого витка второй его обмотки соединено с выходом четвертого регулирующего устройства, начало первого витка первой обмотки третьего электромеханического преобразователя соединено с выходом первого регулирующего устройства, начало первого витка второй его обмотки соединено с выходом второго регулирующего устройства, начало первого витка третьей его обмотки соединено с выходом третьего регулирующего устройства, начало первого витка четвертой его обмотки соединено с выходом четвертого регулирующего устройства, причем конец последнего витка каждой обмотки всех трех электромеханических преобразователей соединен с массой транспортного средства, при этом каждая из трех дифференциальных передач выполнена в виде дифференциального рычага, одним концом шарнирно связанного с органом регулирования рабочего объема соответствующей гидромашины, другим концом шарнирно связанного с соответствующей тягой ручной настройки, а средней частью шарнирно связанного со штоком соответствующего электромеханического преобразователя, причем кинематическая связь одного из двух взаимно проворачивающихся элементов второй гидромашины каждой из трех гидропередач с одним из выходных звеньев соответствующего дифференциала снабжена фрикционной муфтой.
Кинематическая связь ведущей шестерни второго зубчатого ряда с венцом ведомой шестерни зубчатой передачи для подвода ведущего момента к межколесному дифференциалу переднего моста, соединение первой гидромашины второй гидропередачи своим одним из двух взаимно проворачивающихся элементов с ведомой шестерней этого зубчатого ряда и кинематическая связь второй гидромашины этой гидропередачи своим одним из двух взаимно проворачивающихся элементов с одним из выходных звеньев межколесного дифференциала переднего моста обеспечивают бесступенчато регулируемую кинематическую связь между венцом ведомой шестерни зубчатой передачи для подвода ведущего момента к межколесному дифференциалу переднего моста и соответствующим выходным звеном этого дифференциала.
Снабжение адаптирующего устройства дополнительной третьей объемной гидропередачей, имеющей две гидромашины, последовательно соединенные между собой с образованием замкнутого гидравлического контура, первая из которых выполнена регулируемой и своим одним из двух взаимно проворачивающихся элементов соединенной с ведомой шестерней третьего зубчатого ряда, ведущая шестерня которого кинематически связана с венцом ведомой шестерни зубчатой передачи для подвода ведущего момента к межосевому дифференциалу, а вторая гидромашина этой гидропередачи своим одним из двух взаимно проворачивающихся элементов кинематически связана с одним из выходных звеньев указанного дифференциала, обеспечивает бесступенчато регулируемую кинематическую связь между венцом ведомой шестерни зубчатой передачи для подвода ведущего момента к межосевому дифференциалу и соответствующим выходным звеном этого дифференциала.
Снабжение адаптирующего устройства дополнительными третьим и четвертым регулирующими устройствами для выработки управляющих сигналов в зависимости от величин действительных скоростей соответственно третьего и четвертого ведущих колес необходимо для осуществления управления блокировкой межколесного дифференциала переднего моста, а вместе с первым и вторым регулирующими устройствами для управления блокировкой межосевого дифференциала.
Выполнение каждого из четырех регулирующих устройств в виде двух датчиков линейных скоростей перемещения соответствующего ведущего колеса в продольном и вертикальном направлениях, размещенных над этим колесом в продольно-вертикальной плоскости его симметрии, сумматора для геометрического суммирования сигналов от этих датчиков и усилителя выходного сигнала сумматора, один из двух выходов которого одновременно является выходом соответствующего управляющего устройства, а другой его выход соединен с массой транспортного средства, позволяет получить достаточной силы управляющий сигнал, пропорциональный действительной скорости перемещения соответствующего ведущего колеса в продольно-вертикальной плоскости его симметрии.
Связь органа регулирования первой гидромашины третьей объемной гидропередачи посредством третьей дифференциальной передачи с третьим штоком, соединение первого и второго штоков соответственно с сердечником первого и сердечником второго электромеханических преобразователей, каждый из которых снабжен двумя обмотками, провода которых навиты вокруг соответствующих сердечников в противоположных друг другу направлениях, соединение третьего штока с сердечником третьего электромеханического преобразователя, снабженного четырьмя обмотками, провода первой и второй из которых навиты вокруг сердечника в одном направлении, а провода третьей и четвертой - в противоположном, при этом начало первого витка первой обмотки первого электромеханического преобразователя соединено с выходом первого регулирующего устройства, начало первого витка второй его обмотки соединено с выходом второго регулирующего устройства, начало первого витка первой обмотки второго электромеханического преобразователя соединено с выходом третьего регулирующего устройства, начало первого витка второй его обмотки соединено с выходом четвертого регулирующего устройства, начало первого витка первой обмотки третьего электромеханического преобразователя соединено с выходом первого регулирующего устройства, начало первого витка второй его обмотки соединено с выходом второго регулирующего устройства, начало первого витка третьей его обмотки соединено с выходом третьего регулирующего устройства, начало первого витка четвертой его обмотки соединено с выходом четвертого регулирующего устройства, причем конец последнего витка каждой обмотки всех трех электромеханических преобразователей соединен с массой транспортного средства, обеспечивают управляемую блокировку всех трех дифференциалов транспортного средства в следящем за соотношением действительных поступательных скоростей каждого из четырех колес транспортного средства режиме, позволяющую приспосабливать работу механизма блокировки к работе дифференциалов в различных дорожных условиях движения машины, что дает каждому из четырех колес такую же способность катиться в тяговом режиме по неровной поверхности и криволинейному пути без наступления блокировки дифференциалов, что и при прямолинейном движении по ровной поверхности, а в случае ухудшения сцепления с дорогой одной части колес обеспечивает немедленное включение блокировки дифференциалов, не лишая при этом их способности проявлять дифференциальные свойства в соответствии с конкретными дорожными условиями движения транспортного средства.
Выполнение каждой из трех дифференциальных передач в виде дифференциального рычага, одним концом шарнирно связанного с органом регулирования рабочего объема соответствующей гидромашины, другим концом шарнирно связанного с соответствующей тягой ручной настройки, а средней частью шарнирно связанного со штоком соответствующего электромеханического преобразователя, позволяет путем воздействия на тягу ручной настройки подобрать в соответствии с конкретной трансмиссией, в которой установлен данный механизм блокировки, расчетное передаточное отношение соответствующей гидропередачи.
Снабжение кинематической связи одного из двух взаимно проворачивающихся элементов второй гидромашины каждой из трех гидропередач с одним из выходных звеньев соответствующего дифференциала фрикционной муфтой позволяет на ходу транспортного средства отключать каждую из трех гидропередач от соответствующего выходного звена.
На фиг.1 представлена схема механизма блокировки дифференциалов, на фиг. 2 - блок-схема регулирующего устройства.
Механизм блокировки дифференциалов (фиг.1) состоит из трех гидропередач. Первая гидропередача 1 включает регулируемую гидромашину 2 и нерегулируемую гидромашину 3, последовательно связанные друг с другом посредством трубопроводов 4 и 5 с образованием замкнутого гидравлического контура. Вал 6 гидромашины 2 посредством зубчатой пары, состоящей из зубчатых колес 7 и 8, связан с выходным звеном 9 межосевого дифференциала, кинематически связанным с венцом 10 ведомой шестерни зубчатой передачи, подводящей ведущий момент к корпусу 11 межколесного дифференциала заднего моста. При этом зубчатое колесо 7 закреплено на выходном звене 9, а зубчатое колесо 8 соединено с концом вала 6. Вал 12 гидромашины 3 соединен посредством фрикционной муфты 13 с ведущей шестерней 14 зубчатой конической пары, ведомая шестерня 15 которой закреплена на выходном звене 16 дифференциала заднего моста, связанном с правым ведущим колесом 17 этого моста. Другое выходное звено 18 связано с левым ведущим колесом 19. Вторая гидропередача 20 включает регулируемую гидромашину 21 и нерегулируемую гидромашину 22, последовательно связанные друг с другом посредством трубопроводов 23 и 24 с образованием замкнутого гидравлического контура. Вал 25 гидромашины 21 посредством зубчатой пары, состоящей из зубчатых колес 26 и 27, связан с выходным звеном 28 межосевого дифференциала, кинематически связанным с венцом 29 ведомой шестерни зубчатой передачи, подводящей ведущий момент к корпусу 30 межколесного дифференциала переднего моста. При этом зубчатое колесо 26 закреплено на выходном звене 28, а зубчатое колесо 27 соединено с концом вала 25. Вал 31 гидромашины 22 соединен посредством фрикционной муфты 32 с ведущей шестерней 33 зубчатой конической пары, ведомая шестерня 34 которой закреплена на выходном звене 35 дифференциала переднего моста, связанном с правым ведущим колесом 36 этого моста. Другое выходное звено 37 связано с левым ведущим колесом 38. На корпусе 39 межосевого дифференциала закреплен венец 40 ведомой шестерни зубчатой передачи, подводящей ведущий момент к этому корпусу. Ведущая шестерня 41 этой зубчатой передачи закреплена на валу 42. Таким валом может быть, например, промежуточный вал раздаточной коробки, а при его отсутствии ее ведущий вал. Выходное звено 9 связано с ведущим валом 43 зубчатой передачи, подводящей ведущий момент к корпусу 11 дифференциала заднего моста, посредством карданного вала 44, а выходное звено 28 посредством карданного вала 45 связано с ведущим валом 46 зубчатой передачи, подводящей ведущий момент к корпусу 30 дифференциала переднего моста. Третья гидропередача 47 включает регулируемую гидромашину 48 и нерегулируемую гидромашину 49, последовательно связанные друг с другом посредством трубопроводов 50 и 51 с образованием замкнутого гидравлического контура. Вал 52 гидромашины 48 посредством зубчатой пары, состоящей из зубчатых колес 53 и 54, связан с валом 55, кинематически связанным с венцом 40 ведомой шестерни зубчатой передачи, подводящей ведущий момент к корпусу 39 межосевого дифференциала. При этом зубчатое колесо 53 закреплено на валу 55, а зубчатое колесо 54 соединено с концом вала 52. Вал 56 гидромашины 49 соединен посредством фрикционной муфты 57 с ведущей шестерней 58 зубчатой пары, ведомая шестерня 59 которой связана с концом вала 60, на другом конце которого закреплена ведущая шестерня 61 зубчатой конической пары, ведомая шестерня 62 которой закреплена на ведущем валу 46 зубчатой передачи, подводящей ведущий момент к корпусу 30 дифференциала переднего моста. Органы регулирования 63, 64 и 65 рабочих объемов соответственно гидромашин 2, 21 и 48 шарнирно связаны с концами соответственно дифференциальных рычагов 66, 67 и 68, другие концы которых шарнирно связаны соответственно с тягами 69, 70 и 71 ручной настройки. Своей средней частью рычаги 66, 67 и 68 шарнирно связаны соответственно со штоками 72, 73 и 74, соединенными в свою очередь соответственно с сердечниками 75, 76 и 77 первого, второго и третьего электромеханических преобразователей и подпружиненными с двух сторон соответственно пружинами 78 и 79, 80 и 81 и 82 и 83. Сердечники 75 и 76 снабжены каждый двумя обмотками соответственно 84, 85 и 86, 87. При этом в обмотке 84 навивка провода выполнена в направлении, противоположном направлению навивки провода в обмотке 85, а в обмотке 86 - в направлении, противоположном направлению навивки в обмотке 87. Сердечник 77 снабжен четырьмя обмотками. Из них обмотки 88 и 89 имеют навивку проводов одного направления, а обмотки 90 и 91 - другого, противоположного первому. Начала первых витков обмоток 84 и 85 подключены посредством соответственно проводов 92 и 93 к выходам соответственно первого 94 и второго 95 регулирующих устройств, установленных соответственно над левым 19 и правым 17 ведущими колесами заднего моста с креплением соответственно на кронштейнах 96 и 97, жестко связанных с корпусом 98 заднего моста. Начала первых витков обмоток 86 и 87 подключены посредством соответственно проводов 99 и 100 к выходам соответственно третьего 101 и четвертого 102 регулирующих устройств, установленных соответственно над левым 38 и правым 36 направляющими ведущими колесами переднего моста с креплением соответственно на кронштейнах 103 и 104, жестко связанных соответственно со ступицами 105 и 106 левого 38 и правого 36 направляющих колес. Начала первых витков обмоток 88 и 89 подключены посредством соответственно проводов 107 и 108 к выходам соответственно первого 94 и второго 95 регулирующих устройств. Начала первых витков обмоток 90 и 91 подключены посредством соответственно проводов 109 и 110 к выходам соответственно третьего 101 и четвертого 102 регулирующих устройств. Концы последних витков всех обмоток всех трех электромеханических преобразователей подключены к массе транспортного средства. Каждое из регулирующих устройств (фиг. 2) состоит из размещенных в продольно-вертикальной плоскости симметрии соответствующего колеса датчика 111 линейной скорости перемещения этого колеса в вертикальном направлении, датчика 112 линейной скорости перемещения этого колеса в продольном направлении, сумматора 113 для геометрического суммирования сигналов, поступающих от датчиков 111 и 112, усилителя 114 выходного сигнала сумматора 113. При этом один выход усилителя в каждом регулирующем устройстве подключен к массе транспортного средства, а другой является одновременно выходом соответствующего регулирующего устройства.
Механизм блокировки работает следующим образом.
При работе транспортного средства в тяговом режиме, с относительно небольшими скоростями, фрикционные муфты 13, 32, и 57 должны быть водителем включены, обеспечивая постоянное функционирование механизма блокировки, работающего в следящем режиме.
При прямолинейном движении машины по ровной поверхности действительные скорости всех ее колес равны между собой, предопределяя выработку равных между собой электрических сигналов регулирующими устройствами 94, 95, 101 и 102. Поэтому в каждом электромеханическом преобразователе электродинамические силы обмоток, витки которых имеют одно направление навивки, уравновешиваются электродинамическими силами обмоток, витки которых имеют противоположное направление навивки. В результате сердечники 75, 76 и 77, поджатые вместе с соответствующими штоками 72, 73 и 74 с двух сторон соответствующими пружинами 78 и 79, 80 и 81 и 82 и 83, находятся в положениях, соответствующих таким установкам органов регулирования рабочих объемов гидромашин 2, 21 и 48 и, следовательно, таким передаточным отношениям гидропередач 1, 20 и 47, при которых шестерня 15, кинематически связанная посредством первой гидропередачи 1 с выходным звеном 9 и, следовательно, с корпусом 11 дифференциала заднего моста, имеет скорость вращения такую же, что и выходное звено 16 этого дифференциала, обеспечивая тем самым при прямолинейном движении машины по ровной поверхности возможность выходным звеньям 16 и 18 дифференциала заднего моста вращаться со скоростью его корпуса 11, шестерня 34, кинематически связанная посредством второй гидропередачи 20 с выходным звеном 28 и, следовательно, с корпусом 30 дифференциала переднего моста, имеет скорость вращения такую же, что и выходное звено 35 этого дифференциала, обеспечивая тем самым при прямолинейном движении машины по ровной поверхности возможность выходным звеньям 35 и 37 дифференциала переднего моста вращаться со скоростью его корпуса 30, шестерня 62, кинематически связанная посредством третьей гидропередачи 47 с корпусом 39 межосевого дифференциала, имеет скорость вращения такую же, что и вал 46 и, следовательно, выходное звено 28 этого дифференциала, обеспечивая тем самым при прямолинейном движении машины по ровной поверхности возможность выходным звеньям 28 и 9 межосевого дифференциала вращаться со скоростью его корпуса 39.
В случае прямолинейного движения машины и наезда одного из колес, например переднего левого 38, на единичную неровность действительная поступательная скорость его за счет вертикальной составляющей увеличится, поскольку этому колесу нужно будет пройти по поверхности единичной неровности путь больше прямолинейного пути, проходимого каждым из трех других колес по ровной поверхности. Соответственно увеличится и электрический сигнал, вырабатываемый регулирующим устройством 101. Вследствие дифференциальных свойств, проявляемых межколесным дифференциалом переднего моста, скорость вращения колеса 38 и связанного с ним выходного звена 37 увеличится, а колеса 36 и связанного с ним выходного звена 35 снизится. Следовательно, снизится и действительная поступательная скорость колеса 36 и, как следствие, пропорциональный ей электрический сигнал, вырабатываемый регулирующим устройством 102. Одновременно вследствие дифференциальных свойств, проявляемых межосевым дифференциалом, скорость вращения корпуса 39 которого при заданной скорости машины постоянна, скорость вращения корпуса 30, равная среднему значению скоростей вращения выходных звеньев 35 и 37, и кинематически связанного с ним выходного звена 28 увеличится, а скорость вращения выходного звена 9 и кинематически связанного с ним корпуса 11 межколесного дифференциала заднего моста, его выходных звеньев 16 и 18 и связанных с ними соответственно колес 17 и 19, уменьшится. Уменьшатся при этом и электрические сигналы, вырабатываемые регулирующими устройствами 95 и 94. Поскольку при прямолинейном движении по ровной поверхности колеса 36, 19 и 17 проходят одинаковые пути, снижение действительных поступательных скоростей и скоростей вращения этих колес при наезде колеса 38 на единичную неровность, а также уменьшение электрических сигналов, вырабатываемых устройствами 102, 94 и 95, произойдет в одинаковой степени, но меньшей, чем степень возрастания действительной поступательной скорости колеса 38, его скорости вращения и электрического сигнала, вырабатываемого устройством 101. Объясняется это тем, что с увеличением скорости вращения колеса 38 одновременно, но в меньшей степени, увеличивается скорость вращения корпуса 30, способствуя тем самым уменьшению степени снижения скорости вращения колеса 36, его действительной поступательной скорости и электрического сигнала, вырабатываемого устройством 102, и уменьшаются, также в меньшей степени, скорость вращения корпуса 11, связанных с ним колес 17 и 19, их действительные скорости и электрические сигналы, вырабатываемые устройствами 95 и 94. Благодаря тому, что увеличение электрического тока в обмотке 90, питающейся от регулирующего устройства 101, происходит в большей степени, чем уменьшение электрического тока в обмотке 91, питающейся от регулирующего устройства 102, результирующая электродинамическая сила обмоток 90 и 91, имеющих навивку витков одного направления, возрастает. В обмотках 88 и 89, питающихся соответственно от регулирующих устройств 94 и 95, электрический ток снижается, вследствие чего результирующая электродинамическая сила этих обмоток, имеющих навивку витков другого направления, противоположного направлению навивки витков обмоток 90 и 91, снижается. Равновесие электродинамических сил, действующих на сердечник 77 третьего электромеханического преобразователя со стороны обмоток 88, 89, 90 и 91, нарушается. Последний смещается, преодолевая суммарное усилие пружин 83 и 82 и переводя посредством штока 74 и дифференциального рычага 68 орган регулирования 65 рабочего объема гидромашины 48 в положение увеличения, что приводит при постоянной скорости вращения вала 52, кинематически связанного с корпусом 39, скорость вращения которого, как уже отмечалось, постоянна, к пропорциональному увеличению производительности этой гидромашины и изменению передаточного отношения третьей гидропередачи 47 таким образом, что шестерня 62, кинематически связанная с валом 56 гидромашины 49 этой гидропередачи, будет увеличивать свою скорость вращения в той же степени, в какой ее увеличивает вал 46, кинематически связанный с одной стороны с корпусом 30, а с другой с выходным звеном 28, не препятствуя последнему увеличивать свою скорость вращения при наезде колеса 38 на единичную неровность, то есть предоставляя при этом межосевому дифференциалу необходимую свободу проявлять дифференциальные свойства.
Увеличение электрического тока в обмотке 86, питающейся от регулирующего устройства 101, и уменьшение электрического тока в обмотке 87, питающейся от регулирующего устройства 102, приводит к нарушению равновесия электродинамических сил, действующих на сердечник 76 второго электромеханического преобразователя со стороны обмоток 86 и 87, имеющих навивку витков в противоположных друг другу направлениях. Сердечник 76 смещается, преодолевая суммарное усилие пружин 80 и 81 и переводя посредством штока 73 и дифференциального рычага 67 орган регулирования 64 рабочего объема гидромашины 21 в положение уменьшения, что приводит к уменьшению ее производительности. Однако некоторое увеличение скорости вращения вала 25 гидромашины 21, кинематически связанного с увеличивающим свою скорость вращения выходным звеном 28, уменьшает степень снижения производительности гидромашины 21. Снижение производительности гидромашины 21 в уменьшенной степени приводит к такому изменению передаточного отношения второй гидропередачи 20, при котором шестерня 34, кинематически связанная с валом 31 гидромашины 22 этой гидропередачи, будет снижать свою скорость вращения в той же степени, в какой ее снижает выходное звено 35, не препятствуя последнему снижать свою скорость вращения при наезде колеса 38 на единичную неровность, то есть предоставляя при этом межколесному дифференциалу переднего моста необходимую свободу проявлять дифференциальные свойства.
Уменьшение в одинаковой степени электрического тока в обмотках 84 и 85, питающихся соответственно от регулирующих устройств 94 и 95 и имеющих навивку витков в противоположных друг другу направлениях, сохраняет электродинамические силы этих обмоток в равновесии, поэтому сердечник 75 первого электромеханического преобразователя останется на месте, и рабочий объем гидромашины 2 не изменится. Однако снижение скорости вращения вала 6 гидромашины 2, кинематически связанного с выходным звеном 9 межосевого дифференциала, скорость которого согласно дифференциальным свойствам последнего уменьшается, приводит к уменьшению производительности гидромашины 2 и изменению передаточного отношения первой гидропередачи 1 таким образом, что шестерня 15, кинематически связанная с валом 12 гидромашины 3 этой гидропередачи, будет снижать свою скорость вращения в той же степени, в какой ее снижает выходное звено 16, не препятствуя последнему и смежному с ним выходному звену 18 снижать свою скорость вращения в той же степени, в какой ее снижает корпус 11 межколесного дифференциала заднего моста. В результате оба колеса заднего моста 19 и 17, связанные с соответствующими выходными звеньями 18 и 16, будут иметь снижение своей скорости вращения, обусловленное дифференциальными свойствами межосевого дифференциала, в степени, равной степени снижения скорости вращения колеса 36, обусловленного дифференциальными свойствами межколесного дифференциала переднего моста.
При прямолинейном движении машины и одновременном наезде на одинаковые единичные неровности колес одного из мостов, например колес 36 и 38 переднего моста, действительные поступательные скорости их за счет вертикальной составляющей увеличатся в одинаковой степени, поскольку им нужно будет пройти по поверхностям одинаковых единичных неровностей равные между собой пути, величина которых больше прямолинейного пути, проходимого колесами 17 и 19 заднего моста по ровной поверхности. Соответственно вследствие дифференциальных свойств межосевого дифференциала увеличатся и скорости вращения колес 36 и 38, связанных с ними соответствующих выходных звеньев 35 и 37, корпуса 30 дифференциала переднего моста и кинематически связанного с ним выходного звена 28 межосевого дифференциала, а скорости вращения его выходного звена 9, кинематически связанного с ним корпуса 11 дифференциала заднего моста, выходных звеньев 16 и 18 этого дифференциала и связанных с ними соответствующих колес 17 и 19 одновременно снизятся в одинаковой степени. Снизятся соответственно и действительные поступательные скорости этих колес. Одновременно электрические сигналы, вырабатываемые устройствами 101 и 102 пропорционально действительным поступательным скоростям соответственно колес 38 и 36, в одинаковой степени возрастут, а электрические сигналы, вырабатываемые устройствами 94 и 95 пропорционально действительным поступательным скоростям соответственно колес 19 и 17, в одинаковой степени снизятся.
Электрический ток в обмотках 90 и 91, питающихся соответственно от устройств 101 и 102, увеличится, а в обмотках 88 и 89, питающихся соответственно от устройств 94 и 95, уменьшится. Равновесие электродинамических сил, действующих на сердечник 77 со стороны этих обмоток, нарушится. Он сместится, преодолевая суммарное усилие пружин 82 и 83 и переводя посредством штока 74, дифференциального рычага 68 орган регулирования 65 рабочего объема гидромашины 48 в положение увеличения, что приводит к пропорциональному увеличению ее производительности и такому изменению передаточного отношения третьей гидропередачи 47, при котором скорость вращения шестерни 62 возрастает в той же степени, в какой возрастает и скорость вращения вала 46, корпуса 30 и выходного звена 28 межосевого дифференциала, не препятствуя последнему проявлять дифференциальные свойства.
Электрический ток в обмотках 86 и 87, питающихся соответственно от регулирующих устройств 101 и 102, возрастет в одинаковой степени, поэтому равновесие электродинамических сил, действующих на сердечник 76 со стороны этих обмоток, не нарушится. Сердечник 76 останется на месте, и рабочий объем гидромашины 21 не изменится. Увеличение производительности гидромашины 21 и, следовательно, изменение передаточного отношения второй гидропередачи 20 будет происходить пропорционально увеличению скорости вращения вала 25, кинематически связанного с увеличивающим скорость вращения выходным звеном 28. В результате шестерня 34, кинематитически связанная с валом 31 гидромашины 22 этой гидропередачи, будет увеличивать свою скорость вращения в той же степени, в какой происходит увеличение скорости вращения выходного звена 35, не препятствуя последнему и смежному с ним выходному звену 37 повышать свою скорость вращения в такой же степени, в какой ее повышает корпус 30 дифференциала переднего моста.
Электрический ток в обмотках 84 и 85, питающихся соответственно от регулирующих устройств 94 и 95, снижается в одинаковой степени, поэтому равновесие электродинамических сил, действующих со стороны этих обмоток на сердечник 75, не нарушится. Сердечник 75 останется на месте, и рабочий объем гидромашины 2 не изменится. Уменьшение производительности гидромашины 2 и, следовательно, изменение передаточного отношения первой гидропередачи 1 будет происходить пропорционально уменьшению скорости вращения вала 6, кинематически связанного с уменьшающим скорость вращения выходным звеном 9. В результате шестерня 15, кинематически связанная с валом 12 гидромашины 3 этой гидропередачи, будет уменьшать свою скорость вращения в той же степени, в какой ее уменьшает выходное звено 16, не препятствуя последнему и смежному с ним выходному звену 18 снижать свою скорость вращения в такой же степени, в какой ее снижает корпус 11 дифференциала заднего моста.
При прямолинейном движении машины и одновременном наезде на одинаковые единичные неровности колес одного какого-либо борта, например колес 38 и 19 левого борта, действительные скорости их за счет вертикальной составляющей увеличатся в одинаковой степени, поскольку им нужно будет пройти по поверхностям одинаковых единичных неровностей равные между собой пути, величина которых больше прямолинейного пути, проходимого колесами 36 и 17 правого борта по ровной поверхности. Соответственно вследствие дифференциальных свойств межколесных дифференциалов переднего и заднего мостов увеличатся скорости вращения колес 38 и 19 и связанных с ними соответствующих выходных звеньев 37 и 18, а скорости вращения выходных звеньев 35 и 16 и связанных с ними соответствующих колес 36 и 17 одновременно снизятся в одинаковой степени. Снизятся соответственно и действительные поступательные скорости этих колес. При этом скорости вращения корпусов 30 дифференциала переднего моста и 11 дифференциала заднего моста, равные среднему значению скоростей вращения соответствующих выходных звеньев 37 и 35, а также 18 и 16, не изменятся. Одновременно электрические сигналы, вырабатываемые устройствами 101 и 94 пропорционально действительным поступательным скоростям соответственно колес 38 и 19, в одинаковой степени возрастут, а электрические сигналы, вырабатываемые устройствами 102 и 95 пропорционально действительным поступательным скоростям соответственно колес 36 и 17, в одинаковой степени снизятся.
Электрический ток в обмотках 88 и 90, питающихся соответственно от регулирующих устройств 94 и 101 и имеющих противоположную друг другу навивку витков, увеличится в одинаковой степени, а в обмотках 89 и 91, питающихся соответственно от регулирующих устройств 95 и 102 и имеющих также противоположную друг другу навивку витков, уменьшится в одинаковой степени. Равновесие электродинамических сил, действующих на сердечник 77 со стороны обмоток 88, 89, 90 и 91, не нарушится. Следовательно, рабочий объем гидромашины 48 не изменится, и поэтому передаточное отношение третьей гидропередачи 47 останется прежним. В результате шестерня 62, кинематическая связь которой с корпусом 39 межосевого дифференциала, имеющего постоянную скорость вращения, не меняет своего передаточного отношения, сохраняет свою скорость вращения постоянной, не препятствуя валу 46, кинематически связанным с ним корпусу 30 дифференциала переднего моста и выходному звену 28, смежному с этим звеном выходному звену 9 и кинематически связанному с последним корпусу 11 дифференциала заднего моста вращаться с постоянной скоростью.
Электрический ток в обмотке 86, питающейся от регулирующего устройства 101, увеличивается, а в обмотке 87, питающейся от регулирующего устройства 102, уменьшается. Равновесие электродинамических сил, действующих на сердечник 76 со стороны этих обмоток, нарушается. Последний смещается, преодолевая суммарное усилие пружин 80 и 81 и переводя посредством штока 73 и дифференциального рычага 67 орган регулирования 64 рабочего объема гидромашины 21 в положение уменьшения, что при постоянной скорости вращения ее вала 25, кинематически связанного с вращающимся с постоянной скоростью выходным звеном 28, приводит к пропорциональному уменьшению ее производительности и, следовательно, изменению передаточного отношения второй гидропередачи 20 таким образом, что шестерня 34, кинематически связанная с валом 31 гидромашины 22 второй гидропередачи 20, будет уменьшать свою скорость вращения в такой же степени, в какой ее уменьшает выходное звено 35 дифференциала переднего моста, не препятствуя последнему проявлять дифференциальные свойства.
Электрический ток в обмотке 84, питающейся от регулирующего устройства 94, увеличивается, а в обмотке 85, питающейся от регулирующего устройства 95, уменьшается. Равновесие электродинамических сил, действующих на сердечник 75 со стороны этих обмоток, нарушается. Последний смещается, преодолевая суммарное усилие пружин 78 и 79 и переводя посредством штока 72 и дифференциального рычага 66 орган регулирования 63 рабочего объема гидромашины 2 в положение уменьшения, что при постоянной скорости вращения ее вала 6, кинематически связанного с вращающимся с постоянной скоростью выходным звеном 9, приводит к пропорциональному уменьшению ее производительности и, следовательно, изменению передаточного отношения первой гидропередачи 1 таким образом, что шестерня 15, кинематически связанная с валом 12 гидромашины 3 первой гидропередачи 1, будет уменьшать свою скорость вращения в такой же степени, в какой ее уменьшает выходное звено 16 дифференциала заднего моста, не препятствуя последнему проявлять дифференциальные свойства.
Если транспортное средство от прямолинейного движения по ровной поверхности переходит к повороту, например, против часовой стрелки, действительные поступательные скорости (имеется в виду продольная составляющая поступательной скорости колеса) и скорости вращения колес будут изменяться. Переднее 36 и заднее 17 колеса правого борта машины будут увеличивать свои действительные поступательные скорости и вместе с соответствующими выходными звеньями 35 и 16 увеличивать скорости вращения. Переднее 38 и заднее 19 колеса левого борта машины будут уменьшать свои действительные поступательные скорости и вместе с соответствующими выходными звеньями 37 и 18 уменьшать скорости вращения. Допустим, направляющими являются передние колеса, тогда действительная поступательная скорость и скорость вращения правого заднего колеса 17 и связанного с ним выходного звена 16, увеличиваясь при повороте машины против часовой стрелки, будут оставаться меньше соответственно действительной поступательной скорости и скорости вращения правого переднего колеса 36 и связанного с ним выходного звена 35, а действительная поступательная скорость и скорость вращения левого переднего колеса 38 и связанного с ним выходного звена 37, уменьшаясь, будут оставаться больше соответственно действительной поступательной скорости и скорости вращения левого заднего колеса 19 и связанного с ним выходного звена 18. При таком соотношении скоростей вращения выходных звеньев 37 и 18, а также 35 и 16 при входе машины в поворот скорость вращения корпуса 30 дифференциала переднего моста, равная среднему значению скоростей вращения выходных звеньев 35 и 37, возрастет, а скорость вращения корпуса 11 дифференциала заднего моста, равная среднему значению скоростей вращения выходных звеньев 16 и 18, снизится.
В соответствии с изменениями действительных поступательных скоростей колес машины при входе ее в поворот против часовой стрелки электрический сигнал, вырабатываемый регулирующим устройством 102, начнет возрастать, а вырабатываемый регулирующим устройством 101 - снижаться, электрический сигнал, вырабатываемый регулирующим устройством 95, будет возрастать, оставаясь меньше электрического сигнала, поступающего от устройства 102, а вырабатываемый регулирующим устройством 94 - снижаться, оставаясь меньше электрического сигнала, поступающего от устройства 101.
Электрический ток в обмотках 88 и 90, питающихся соответственно от регулирующих устройств 94 и 101, будет уменьшаться, а в обмотках 89 и 91, питающихся соответственно от регулирующих устройств 95 и 102, увеличиваться. Вследствие того, что электрический сигнал от устройства 102 при повороте машины превышает электрический сигнал от устройства 95, а электрический сигнал от устройства 101 превышает электрический сигнал от устройства 94, сумма электрических токов, протекающих по обмоткам 90 и 91, имеющих навивку витков одного направления, будет превышать сумму электрических токов, протекающих по обмоткам 88 и 89, имеющих навивку витков другого направления. В результате равновесие электродинамических сил, действующих на сердечник 77 со стороны упомянутых обмоток, нарушится. Сердечник 77 начнет смещаться, преодолевая суммарное усилие пружин 82 и 83 и переводя посредством штока 74 и дифференциального рычага 68 орган регулирования 65 рабочего объема гидромашины 48 в положение увеличения, что приводит к увеличению производительности гидромашины 48 и, следовательно, изменению передаточного отношения третьей гидропередачи 47 таким образом, что шестерня 62 будет увеличивать свою скорость вращения в такой же степени, в какой ее увеличивает вал 46 и кинематически связанные с ним корпус 30 дифференциала переднего моста и выходное звено 28 межосевого дифференциала, не препятствуя последнему проявлять дифференциальные свойства.
Электрический ток в обмотке 87, питающейся от устройства 102, будет возрастать, а в обмотке 86, питающейся от устройства 101, снижаться. Равновесие электродинамических сил, действующих со стороны этих обмоток на сердечник 76, нарушается. Последний смещается, преодолевая суммарное усилие пружин 80 и 81 и переводя посредством штока 73 и дифференциального рычага 67 орган регулирования 64 рабочего объема гидромашины 21 в положение увеличения. Одновременное с увеличением рабочего объема гидромашины 21 увеличение скорости вращения ее вала 25, кинематически связанного с увеличивающим свою скорость вращения выходным звеном 28, приводит к такому увеличению ее производительности и, как следствие, изменению передаточного отношения второй гидропередачи 20, при котором шестерня 34, кинематически связанная с валом 31 гидромашины 22 этой гидропередачи, будет увеличивать свою скорость вращения, опережая увеличивающий свою скорость вращения корпус 30 дифференциала переднего моста в такой же степени, в какой его опережает выходное звено 35, увеличивающее свою скорость вращения при повороте машины. Таким образом, шестерня 34, увеличивая свою скорость вращения в такой же степени, в какой ее увеличивает выходное звено 35, обеспечивает дифференциалу переднего моста свободу проявлять дифференциальные свойства при повороте машины.
Электрический ток в обмотке 84, питающейся от устройства 94, будет уменьшаться, а в обмотке 85, питающейся от устройства 95, увеличиваться. Равновесие электродинамических сил, действующих со стороны этих обмоток на сердечник 75, нарушается. Последний смещается, преодолевая суммарное усилие пружин 78 и 79 и переводя посредством штока 72 и дифференциального рычага 66 орган регулирования 63 рабочего объема гидромашины 2 в положение увеличения. Одновременное с увеличением рабочего объема гидромашины 2 уменьшение скорости вращения ее вала 6, кинематически связанного с уменьшающим свою скорость вращения выходным звеном 9, приводит к такому увеличению ее производительности и, как следствие, изменению передаточного отношения первой гидропередачи 1, при котором шестерня 15, кинематически связанная с валом 12 гидромашины 3 этой гидропередачи, будет увеличивать свою скорость вращения, опережая уменьшающий свою скорость вращения корпус 11 дифференциала заднего моста в такой же степени, в какой его опережает выходное звено 16, увеличивающее свою скорость вращения при повороте машины. Таким образом, шестерня 15, увеличивая свою скорость вращения в такой же степени, в какой ее увеличивает выходное звено 16, обеспечивает дифференциалу заднего моста свободу проявлять дифференциальные свойства при повороте машины.
Если при каком-либо из описанных выше режимов движения машины сцепление с опорной поверхностью одного из ее колес или колес одного из ведущих мостов, или колес одного из бортов машины ухудшится, скорость вращения этого или соответственно этих колес не увеличится, как это было бы в случае с простыми дифференциалами, потому что со стороны корпусов 11, 30 и 39 соответствующих дифференциалов на их выходные звенья соответственно 16, 35 и 28 наложены дополнительные кинематические связи с передаточными отношениями, определяемыми конкретным режимом движения машины, обеспечивающие в соответствии с кинематикой движения ее колес определенные скорости вращения выходных звеньев 35 и 37 дифференциала переднего моста, 16 и 18 дифференциала заднего моста, 28 и 9 межосевого дифференциала. Распределение ведущего момента между колесами машины при этом будет происходить пропорционально приложенным к ним сопротивлениям, как это имеет место при принудительно заблокированных дифференциалах.
Таким образом, механизм блокировки, поддерживая межколесные дифференциалы переднего и заднего ведущих мостов и межосевой дифференциал в заблокированном состоянии, обеспечивает последним посредством адаптирующего устройства возможность проявлять дифференциальные свойства, приспосабливая скорости вращения колес к дорожным условиям движения путем принудительного изменения передаточных отношений упомянутых дополнительных кинематических связей в соответствии с кривизной пути и профилем дороги.
Механизм блокировки при выполнении транспортных работ отключают путем выключения фрикционных муфт 13, 32 и 57. Это необходимо, чтобы исключить возможный занос машины, который может произойти, если на достаточно высоких скоростях движения наступит внезапная блокировка дифференциалов.
Способность предлагаемого механизма блокировки автоматически и бесступенчато корректировать свои кинематические параметры, приспосабливаясь к работе всех трех дифференциалов в дифференциальном режиме в различных дорожных условиях и обеспечивая при этом мгновенную блокировку дифференциалов в момент ухудшения сцепления одного или части колес машины с опорной поверхностью, не лишающую всех трех дифференциалов способности одновременно с действием блокировки проявлять дифференциальные свойства, повышает по сравнению с прототипом тягово-скоростные качества, проходимость, производительность и топливную экономичность машины.
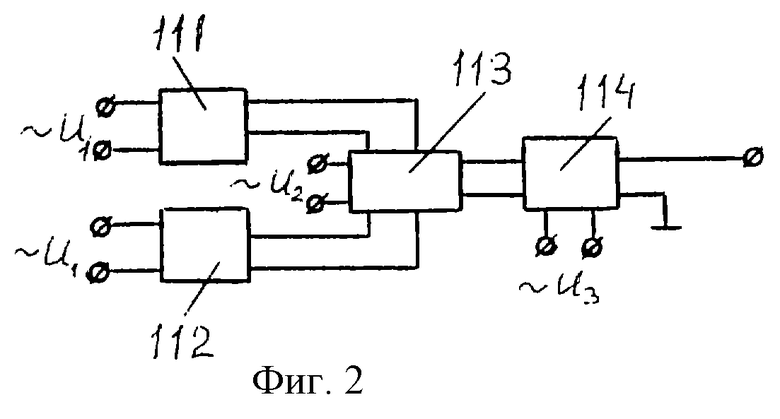
Изобретение относится к транспортному машиностроению, в частности к механизмам блокировки межосевого и межколесных дифференциалов транспортного средства повышенной проходимости с колесной формулой 4•4. В механизме блокировки дифференциалов транспортного средства адаптирующее устройство выполнено из трех регулируемых объемных гидропередач. Первая гидропередача 1 кинематически связывает выходное звено 9 межосевого дифференциала с выходным звеном 16 дифференциала заднего моста, вторая гидропередача 20 - выходное звено 28 межосевого дифференциала с выходным звеном 35 дифференциала переднего моста, третья гидропередача 47 - корпус 39 межосевого дифференциала с его выходным звеном 28. Первая гидропередача 1 регулируется посредством первого электромеханического преобразователя от разницы управляющих электрических сигналов, вырабатываемых регулирующими устройствами 94 и 95, пропорционально действительным скоростям колес заднего моста, вторая 20 - посредством второго преобразователя от разницы сигналов, вырабатываемых устройствами 101 и 102 пропорционально действительным скоростям колес переднего моста, третья 47 - посредством третьего преобразователя от разницы сигналов, вырабатываемых упомянутыми устройствами пропорционально средним значениям действительных скоростей колес переднего и колес заднего мостов. Технический результат - повышение тягово-скоростных качеств, проходимости, производительности и топливной экономичности. 2 з.п.ф-лы, 2 ил.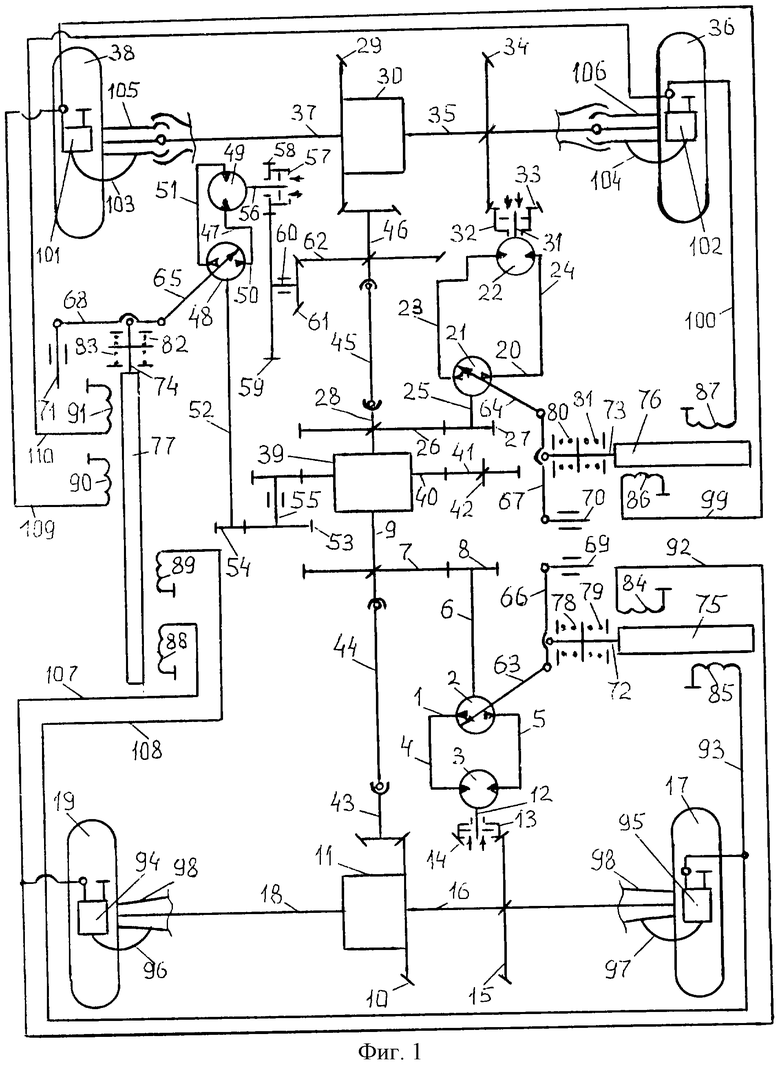
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2164478C2 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2156903C1 |
| SU 759348 А, 30.08.1980 | |||
| US 4874059 А, 17.10.1989. | |||

