Изобретение относится к области измерительной техники и может быть использовано при измерении различных физических параметров в нестационарном термическом режиме нетермостатированными измерительньми приборами, например нетермостатированными статическими гравиметрами.
Известен принятый за прототип способ определения температурных поправок при измерениях нетермостатированным статическим гравиметром на основе учета инерционного запаздывания показаний гравиметра от изменения температуры (Гуляев П. Ю. Методика учета температурной динамики среды по результатам измерений. Цифровое картографирование, городской кадастр и ГИС: Научн.-техн. сб. по геодезии, аэрокосм. съемкам и картографии. М.: ЦНИИГАиК, 1996. - С. 78-83). Способ включает проведение эталонных испытаний с определением реакции гравиметра на заданные изменения температурного режима, последующий выбор (построение) прогнозной рекуррентной динамической модели температурной инерционности гравиметра, используемой при проведении гравиметрических измерений для вычисления температурных поправок по измеренным до рейса и во время рейса температурам прибора и определенным при эталонных испытаниях коэффициентам инерционности, и последующее внесение вычисленных температурных поправок в результаты измерений.
Недостатком способа является его неопределенность, что серьезно затрудняет практическое использование при производстве гравиметрических работ, так как в нем не установлен вид переходной функции, выражающей инерционную зависимость показаний гравиметра от температуры. В способе предлагается выполнять структурную идентификацию модели для каждого конкретного случая моделирования ("конкретных реализаций моделируемых процессов"), то есть для каждой разновидности температурного режима надо заново эталонировать гравиметр и строить новую модель.
Задачей изобретения является создание универсального способа определения температурных поправок, обеспечивающего уменьшение температурных погрешностей гравиметрических измерений при любых температурных режимах.
Поставленная задача решается за счет того, что в способе определения температурных поправок при измерениях нетермостатированным статическим гравиметром на основе учета инерционного запаздывания показаний гравиметра от изменения температуры, включающем проведение эталонных испытаний с определением реакции гравиметра на заданные изменения температурного режима, последующий выбор (построение) прогнозной рекуррентной динамической модели температурной инерционности гравиметра, используемой для вычисления температурных поправок в результаты измерений по измеренным до рейса и во время рейса температурам прибора и определенным при эталонных испытаниях коэффициентам инерционности, и последующего внесения вычисленных температурных поправок в результаты измерений, согласно изобретению для структурной идентификации рекуррентной динамической модели в качестве переходной функции состояния используют вид термодинамической функциональной инерционной зависимости внутренней температуры системы от температуры внешней среды для случая линейного изменения температуры.
Способ согласно изобретению основан на не используемом ранее и предложенном автором подходе к созданию прогнозной рекуррентной динамической модели зависимости внутреннего температурного режима гравиметра от внешней температуры. Полученный технический результат обусловлен тем, что в результате реализации способа строятся прогнозные модели изменения эквивалентных температур (соответствующих величине фактического изменения показаний от изменения температуры), а не значений ускорений силы тяжести, соответствующих нулевому делению шкалы (смещения нульпункта). Для всех приборов в любых температурных режимах задается единый универсальный вид функции термодинамической инерционной зависимости внутренней температуры системы от температуры внешней среды. При моделировании производится только параметрическая идентификация, заключающаяся в определении коэффициентов инерции. Они определяются для каждого прибора при метрологических исследованиях и при проведении гравиметрических работ задаются априорно при любых температурных режимах.
Модель представлена формулами
tэкв,i=(ti-t0)-Fi, (1)
qi=K•tэкв,i, (3)
где tэкв,i - вычисленная эквивалентная температура;
Fi - переходная функция состояния;
τ - время измерения;
ti - измеренная температура в момент i;
t0 - измеренная температура в начальный момент;
ε - коэффициент инерции, определяемый по результатам эталонирования;
j - индекс (+ или -) при коэффициенте ε (εj = ε+ при значении tj-t0≥0, εj = ε- при значении tj-t0<0).
е - основание натуральных логарифмов;
qi - поправка в измеренное значение силы тяжести за эквивалентную температуру;
К - температурный коэффициент для вычисления поправок за температуру, определяемый по результатам эталонирования;
i - порядковый номер момента, на который вычисляется температура.
При i=1 значение функции Fi-1=0.
Для построения модели используются совокупности G измеренных значений ускорений силы тяжести g(τ)∈G и совокупности Твн значений внутренних температур гравиметра tвн(τ)∈Tвн. Значения τ принадлежат совокупности ряда моментов измерений.
Коэффициенты инерции ε и температурный коэффициент К определяются по результатам эталонирования гравиметров методом подбора путем подстановки в формулы (1)-(3) различных численных значений этих коэффициентов и выбора из них вероятнейших путем сопоставления временного ряда вычисленных значений поправок q(τ)∈Q с рядом измеренных значений ускорений силы тяжести g(τ)∈G. Условие выбора - минимальное расхождение этих рядов.
На фиг. 1-3 представлены графики, иллюстрирующие способ согласно изобретению.
Способ осуществляется следующим образом. До начала работ при проведении метрологических исследований приборов производятся температурные исследования в режиме суточных колебаний температуры, близком по амплитуде и периодичности к режиму предстоящих работ. Измерения начинают спустя 2-3 суток после начала заданного режима. В процессе исследования в течение 3-5 суток непрерывно с интервалами 0,5-1 час снимаются показания гравиметра (ускорение силы тяжести g и внутренняя температура tвн) и фиксируется время снятия показаний. Полученные временные ряды результатов измерений используются для определения эталонных значений коэффициентов инерции ε+ и ε- и температурного коэффициента К по приведенным выше формулам (1)-(3). Определение коэффициентов ε+, ε- и К производится методом подбора. Численные значения коэффициентов подставляются в формулы (1)-(3), вычисляются ряды значений tэкв,i и поправок qi. Затем временные ряды поправок q(τ)∈Q, вычисленных при различных значениях ε+, ε- и К, сравниваются с временным рядом измеренных значений g(τ)∈G, оценивается точность построенных моделей и выбираются вероятнейшие значения коэффициентов ε+, ε- и К, которые принимаются за эталонные. Условием выбора служит минимальное расхождение рядов Q и G. Все вычисления производятся на компьютере.
При проведении гравиметрических работ необходимо начинать измерение температуры гравиметра (с фиксацией моментов времени измерений) за несколько часов до начала рейса. Продолжительность предшествующего рейсу периода измерения температуры должна быть не меньше величины ε (в часах), определенной при эталонировании. Частота измерений до начала рейса и во время рейса должна обеспечивать линейность изменения температуры между моментами измерений. По окончании рейса вычисляются ускорения силы тяжести g и поправки q по формулам (1)-(3), причем вычисление эквивалентных температур начинается с момента t0 до начала рейса, отстоящего от начала рейса на интервал времени, не меньший величины ε. После введения поправок q в измеренные значения силы тяжести g смещение нульпункта учитывается линейно по времени по стандартной методике.
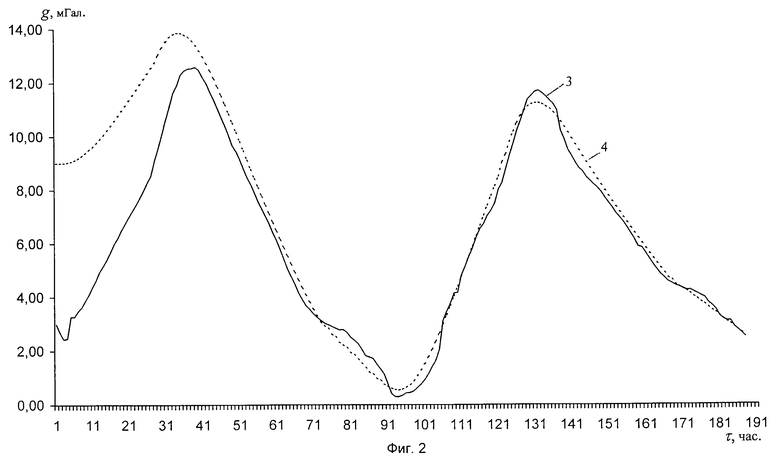
Эффективность предлагаемого способа подтверждается приведенными на фиг. 1-3 графиками, полученными при реализации изобретения. Измерения выполнялись гравиметром типа ГНУ. В продолжение всего периода измерений гравиметр неподвижно находился на постаменте. Внутренняя температура гравиметра менялась от 7 до 35oС. Отсчеты по гравиметру производились с интервалом 1 час. На фиг. 1 представлены графики изменений во времени внутренней температуры tвн (кривая 1) и показаний g гравиметра (кривая 2). Ускорения силы тяжести g вычислялись по стандартной методике. Судя по графикам (кривые 1 и 2), запаздывание изменения показаний g относительно изменения температуры tвн составляет более 10 часов. На фиг.2 представлены графики изменения во времени показаний гравиметра g (кривая 3) и вычисленных согласно изобретению значений поправок q (кривая 4). Графики g и q (кривые 3 и 4 на фиг.2) синфазны, то есть запаздывание изменения показаний практически отсутствует.
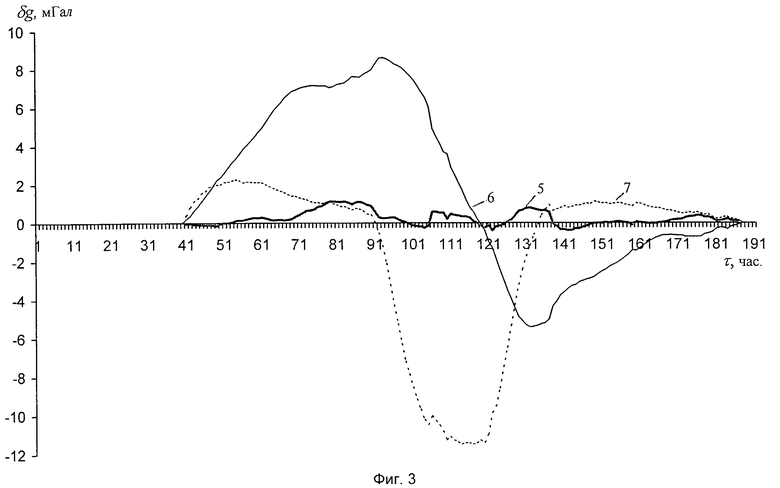
На фиг.3 представлены графики ошибок δg, оставшихся в показаниях гравиметра после учета температурных поправок и поправок за линейное смещение нульпункта. Кривая 5 - график ошибок, оставшихся после исправления согласно изобретению показаний g температурными поправками q, вычисленными по формулам (1)-(3). Для сравнения на фиг.3 приведен график ошибок, оставшихся после учета смещения нульпункта в неисправленных показаниях g (кривая 6), а также график ошибок, оставшихся после учета температурных поправок, вычисленных по внутренней температуре tвн без учета инерционного запаздывания показаний гравиметра от температуры (кривая 7). Из сравнения между собой кривых 5-7 на фиг. 3, видно, что после введения в измеренные значения g поправок q, вычисленных согласно изобретению, ошибки измерений (кривая 5) уменьшились почти в 10 раз.
Таким образом, способ согласно изобретению за счет повышения точности измерений позволяет практически неограниченно увеличивать продолжительность рейсов и сокращать количество опорных пунктов. Способ применим для любых температурных режимов, которые могут возникнуть при производстве гравиметрических работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ компенсации нелинейной составляющей скорости дрейфа нуль-пункта статического термостатированного гравиметра при гравиметрических измерениях | 2021 |
|
RU2765613C1 |
| СПОСОБ НАЗЕМНОЙ ГРАВИРАЗВЕДКИ | 1993 |
|
RU2064684C1 |
| СПОСОБ ГРАВИТАЦИОННОГО КАРОТАЖА БУРОВЫХ СКВАЖИН | 1988 |
|
SU1574061A3 |
| СПОСОБ МНОГОКОМПОНЕНТНОГО ГРАВИМЕТРИЧЕСКОГО МОДЕЛИРОВАНИЯ ГЕОЛОГИЧЕСКОЙ СРЕДЫ | 2007 |
|
RU2364895C1 |
| СПОСОБ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2575316C1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2304794C2 |
| Способ измерения гравитационного поля Земли | 2020 |
|
RU2737034C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАВИТАЦИОННОГО И ВОЛНОВОГО ПОЛЕЙ | 2003 |
|
RU2260199C2 |
| Способ контроля точности площадной гравиметрической съемки | 2021 |
|
RU2781761C1 |
| ГРАВИМЕТР | 2008 |
|
RU2370794C1 |
Использование: при измерении ускорения силы тяжести нетермостатированными статическими гравиметрами. Сущность: проводят эталонные испытания с определением реакции гравиметра на заданные изменения температурного режима. Выбирают прогнозную рекуррентную динамическую модель температурной инерционности гравиметра, используемую для вычисления температурных поправок в результаты измерений по измеренным до рейса и во время рейса температурам прибора и определенным при эталонных испытаниях коэффициентам инерционности. Вносят вычисленные температурные поправки в результаты измерений. Для структурной идентификации рекуррентной динамической модели в качестве переходной функции состояния используют вид термодинамической функциональной инерционной зависимости внутренней температуры системы от температуры внешней среды для случая линейного изменения температуры. Технический результат - уменьшение температурных погрешностей гравиметрических измерений при любых температурных режимах. 3 ил.
Способ определения температурных поправок при измерениях нетермостатированным статическим гравиметром на основе учета инерционного запаздывания показаний гравиметра от изменения температуры, включающий проведение эталонных испытаний с определением реакции гравиметра на заданные изменения температурного режима, последующий выбор (построение) прогнозной рекуррентной динамической модели температурной инерционности гравиметра для вычисления температурных поправок по измеренным до рейса и во время рейса температурам прибора и определенным при эталонных испытаниях коэффициентам инерционности и последующего внесения вычисленных поправок в результаты измерений, отличающийся тем, что при выборе рекуррентной динамической модели изменения температуры для структурной идентификации модели в качестве переходной функции состояния используют вид термодинамической функциональной инерционной зависимости внутренней температуры системы от температуры внешней среды для случая линейного изменения температуры.
| А.П | |||
| ЮЗЕФОВИЧ, Л.В | |||
| ОГОРОДОВА, Гравиметрия | |||
| - М.: Недра, 1980, с.112-115 | |||
| US 3683697 А, 15.08.1972 | |||
| SU 1436680 А3, 19.06.1995 | |||
| ГРАВИМЕТР | 1997 |
|
RU2127439C1 |

