Изобретение относится к геофизической технике и касается способов и устройств для определения параметров гравитационного и волнового полей в скважинах, подземных выработках, на море, земной поверхности, летающих объектах, в частности, зенитного и визирного углов скважины, ускорения движения скважинных приборов, при гидродинамических исследованиях скважин, в гравиразведке, сейсморазведке, метеорологии, сейсмологии, прогнозе землетрясений, в навигационной технике, а также охране гражданских и военных объектов.
Известен способ и устройства гравиметрической разведки, основанной на изучении ускорения силы тяжести g и влияния на него геологических тел [1].
Составляющие силы тяжести на поверхности Земли, воздействующие на единичную массу по осям координат, определяются выражениями


где Fx, Fv, Fz - составляющие силы тяжести по осям координат;
Pх, Ру - составляющие центробежной силы Р на поверхности Земли;
R - радиус Земли в точке наблюдения 
М - масса Земли;
G - гравитационная постоянная,
а полная величина напряженности поля силы тяжести (гравитационного поля):

gx, gy, gz являются частными производными по соответствующим осям гравитационного потенциала W, вертикальная производная Wz которого не зависит от центробежных сил. Именно она является объектом изучения гравиразведки:
Измеряется она в Галах. 1 Гал=1 см/сек.
g≈9,8 м/сек2=980 Гал=980 000 мГал.
Важнейшими периодическими изменениями силы тяжести являются солнечно- и лунно-суточные вариации, их максимальная суммарная величина - около 0,3 мГал.
Устройства, реализующие описанный выше способ, называются гравиметрами. Они подразделяются на статические и динамические, а по области применения - на полевые наземные, скважинные, морские и аэрогравиметры.
Во всех гравиметрах обычно имеются следующие функциональные устройства: чувствительные, компенсационные устройства для компенсации воздействия силы тяжести, компенсаторы температуры, системы регистрации, установочные устройства, изоляционные устройства (от внешних воздействий температуры, давления, магнитного и электрического полей). По особенностям чувствительных систем и материалу, из которого сделана основа чувствительной системы, различают гравиметры кварцевые, металлические и кварцево-металлические.
В чувствительных элементах гравиметров используют свойства пружин и крутильных нитей с подвешенным грузиком, воздействие которого в переменном гравитационном поле приводит к изменению натяжения пружины или углу закручивания нити. Для приведения системы в некоторое исходное положение прикладывают компенсационную механическую силу, которую измеряют.
Обычно в гравиметрах имеется два компенсационных устройства, приводящих чувствительную систему в равновесие: 1) для компенсации крупных изменений силы тяжести (при переездах из района в район); 2) измерительное, с помощью которого оценивают величину малых приращений силы тяжести в процессе съемки. По диапазону измерений силы тяжести гравиметры подразделяют на узкодиапазонные (от 0 до 100 мГал) и широкодиапазонные (от 0 до 6000 мГал). Первые используют при высокоточных детальных съемках, а вторые - при региональных работах и съемках в высокогорных местностях.
Масса гравиметров варьирует в широких пределах от 2 до 30 кг. Более точные и широкодиапазонные имеют большую массу и высокую стоимость.
К общим недостаткам известных гравиметров следует отнести сложность механических чувствительных систем, как правило, невозможность измерения в динамическом режиме из-за несовершенства способов определения положения грузика, подвешенного на упругом элементе, малый диапазон измерений, значительный вес из-за сложных компенсационных систем, а также неширокая область применения и невозможность определения параметров волновых полей, частота колебаний которых больше 0 Гц. Гравиметры до настоящего времени не нашли применения в скважинах. Необходимость привязки к опорной сети района работ сдерживает производительность гравиметрических работ. Все известные типы гравиметров не позволяют определять угловые координаты объектов в гравитационном поле.
Известен способ [2] и устройство для исследования высокотемпературных скважин датчиками зенитного угла (ЗУ) с использованием гравитационного поля Земли, при котором на корпус датчика ЗУ устанавливается термодатчик и исследуется зависимость показаний датчика ЗУ от изменения его температуры. Эта зависимость используется затем для внесения поправок в показания датчика на температуру окружающей среды. Но этот способ и устройство датчика не обеспечивают достаточной точности измерений в динамике при перемещении прибора по скважине из-за тепловой инерции датчиков и не позволяет измерять параметры физических полей, кроме угловой ориентации устройства относительно гравитационного вектора.
Известен способ и устройство для определения параметров колебаний почвы с помощью датчика (сейсмоприемника), состоящего из корпуса, пружины, инертной массы, демпфера и электромеханического индукционного преобразователя [3]. Такие устройства плохо принимают вынужденные колебания, частота которых меньше частоты их собственных колебаний, и не могут быть использованы для измерений пульсаций давлений жидкостей, гидроакустических сигналов, параметров гравитационных полей.
Для изучения геологического строения районов мелководных частей шельфа, в дельтах рек и неглубоких озерах для сейсморазведки используются два типа датчиков: гидрофоны, работающие в воде, и геофоны, работающие в сцеплении с грунтом [4].
Например, фирма Input Output изготавливает совмещенный датчик BCS-2. Внутри прочного корпуса располагается геофон модели SM-4 в карданном подвесе. С одного конца корпуса крепится гидрофон (Prescis 2520), а с другого выходит кабель с герморазъемом. Фирма Geo Space выпускает датчик GS-PVl-Full Wave с тремя ортогонально направленными (два горизонтальных и один вертикальный) геофонами в карданных подвесах и одним гидрофоном.
Аналогичные двухкомпонентные датчики выпускает фирма Sercel.
Помимо увеличения объема получаемой информации при использовании двойного датчика, объединение данных от гидрофона и геофона позволяет убрать ложные сигналы, а также разделить данные геофона на Р- и S-волны. Одновременные измерения скорости и давления (геофоном и гидрофоном) вносят усовершенствования в методы обработки, использующие такие приемы, как инверсия и деконволюция.
Фирмой «Си Технолоджи» была разработана конструкция двухкомпонентного датчика, совмещающего в одном корпусе гидрофон и геофон. Датчик разрабатывался для буксируемой цифровой телеметрической системы, способной работать в условиях мелководья, в транзитных зонах и прилегающей к ним суше. В связи с тем, что геофон работает только при хорошем сцеплении с грунтом, корпус датчика выполняется достаточно тяжелым для обеспечения необходимого сцепления.
Для уменьшения времени готовности системы геофон, качающийся в карданном подвесе, необходимо демпфировать. С этой целью геофон помещают в герметичный стакан, заполненный демпфирующей, не проводящей ток инертной жидкостью, сохраняющей свои характеристики в диапазоне температур от минус 40 до плюс 40°С.
Для передачи давления к гидрофону в корпусе имеются специальные проточки, однако сам датчик имеет гидроизоляцию и не пропускает воду в прочный корпус. Корпус датчиков, выполненный в виде трубы, позволяет при необходимости встроить внутри электронику для сбора данных от датчиков и передачи их сейсморегистрирующей станции.
Датчик имеет большие габариты: ⊘ 68, длина 310 мм и вес 3,5 кг, небольшую рабочую глубину погружения в водную среду (до 200 м) и небольшой максимальный угол наклона карданного подвеса (до 30°). Геофон при собственной частоте 10 Гц имеет чувствительность 27,6 В/м/с, а гидрофон - чувствительность 120 мкВ/Па. Геофоны остальных перечисленных фирм имеют те же характеристики, но чувствительность GS-PVI-S (Geo Space) в три раза выше, а чувствительность гидрофона в 2 или 3 раза ниже.
Общим недостатком описанных геофонов является необходимость применения карданного подвеса, неспособность к работе при больших углах наклона (более 30°) и инфранизких частотах (до 0 Гц), а также частотах более 300 Гц, а гидрофонов - малая чувствительность и неширокий диапазон частот.
В Нижне-Волжском НИИ геологии и геофизики разработан сейсмограф [5]. Он представляет собой 3-компонентное устройство [6] с единой жидкостной инертной массой, с возможностью контроля выходных параметров в процессе эксплуатации. В устройство введена система режима оптимального затухания. Частотный диапазон от 0,1 Гц до 30-50 Гц. Взаимовлияние компонент вибрации и поперечная чувствительность в неизменяемых направлениях менее 1%. Устройство содержит основание, на котором расположены три преобразователя, причем каждый преобразователь представляет собой полый корпус, герметично закрытый с обоих торцов упругими эластичными мембранами и заполненный электрохимической окислительно-восстановительной системой, внутренний объем полого корпуса разделен на два отсека, соединенные каналом, в котором расположены два измерительных электрода и два противоэлектрода, охватывающие измерительные электроды, причем все электроды выполнены перфорированными и жестко установлены в полом корпусе. Каждый преобразователь помещен в индивидуальный кожух, причем надмембранные полости соединены каналом, выполненным на внутренней поверхности индивидуального кожуха.
Благодаря защите измерительных электродов от влияния проводящего материала отсеков преобразователь слабо реагирует на резкие одиночные воздействия, обусловленные ударами. Существенно снижены время релаксации, уровень собственных шумов, повышена чувствительность, а наличие индивидуальных кожухов обусловливает независимость показаний от атмосферных воздействий. Указывается также, что трехкомпонентная установка с сочетанием углов наклона преобразователя с углами наклона их электродных блоков 70°-110° практически исключает при донных постановках вероятность расположения электродного блока в опасной горизонтальной плоскости.
При регистрации различных волновых процессов приемник акустических колебаний может быть весьма эффективно использован в случаях определения направления на источник колебаний, а также для разделения распространяющихся волн по их типу (продольные, поперечные, волны Релея, Лява и т. д.).
К недостаткам устройства следует отнести то, что в качестве чувствительного элемента в нем используется инерционная масса, состоящая только из жидкости-электролита, и неподвижная система электродов. Чувствительный элемент не работает при расположении его оси, близком к горизонтальному, что не позволяет использовать устройство в качестве гравиметра и для регистрации непрерывного спектра инфранизких частот до нуля Гц. Не может работать устройство и в качестве гидрофона, а также барометра. С другой стороны, высокочастотная область его применения ограничена 300 Гц.
Известны измерительные преобразователи с компенсацией магнитных потоков (дифманометры), предназначенные для измерения разности давлений, избыточных давлений, разрежений, уровней пульсаций давлений [7]. Характеристики преобразователей по диапазону измерения давлений, по точности, по диапазону рабочих температур (ограничен 80°С) и по габаритным размерам не позволяют их использовать в глубоких скважинах, а также для приема сейсмических сигналов и в качестве гравиметров.
Известны мембранные тензопреобразователи для использования в качестве датчиков давления (силы) [8]. Принцип их действия основан на использовании тензоэффекта в кремнии. Они включают в себя корпус, мембрану с кристаллом сапфира с гетероэпитаксиальным слоем кремния, на поверхности которого создана мостовая схема из 4-х тензорезисторов. Кристалл по всей плоскости жестко соединен с мембраной, которая под действием измеряемого давления или силы (в том числе и силы тяжести) деформируется, вызывая изменения сопротивления мостовой тензосхемы, которое преобразуется в электрический выходной сигнал. Достоинством таких устройств являются малые габариты, недостатком - ограничения на использование при температурах свыше 80°С. Большая погрешность и малый динамический диапазон не позволяют использовать их в качестве гравиметра или сейсмоприемника.
Известен датчик для измерения разности давлений [9], выполненный в виде корпуса с воспринимающими давление мембранами, с несжимаемой жидкостью, заполняющей полость между корпусом и мембранами и приспособлением для определения смещения. Это приспособление представляет собой дифференциальный конденсатор, подвижный электрод которого жестко связан с мембранами. Динамический диапазон измерений разности давлений, чувствительность и точность этого датчика ограничены конструктивными особенностями его элементов, в частности - приспособления для измерения смещения. Кроме того, датчик не обеспечивает приема сейсмических сигналов и не может быть использован в качестве гравиметра.
Известна рабочая жидкость (РЖ) электролитического резистивного преобразователя [10], представляющая собой раствор ионофора в жидком органическом соединении с числами переноса катионов и анионов ионофора, близкими к 0,5, отличающаяся тем, что жидким растворителем служит пропиленкарбонат (4-метил-1,3-диоксоланон-2), а ионофором - калия гексафторофосфат при концентрациях в пропиленкарбонате от 1,0·10-4 до 3,0·10-4 кг-экв·м-3. Отличительной особенностью этой РЖ является удачное сочетание ее свойств вязкости, термостойкости со стабильностью резистивных параметров и индифферентностью к конструкционным материалам датчика в диапазоне рабочих температур от -50°С до +250°С.
Известен способ определения зенитного и визирного углов скважины [11] с помощью электролитического датчика. Он включает в себя измерение электролитическим датчиком с РЖ, описанной в [10], выходного сигнала Uj дифференциально включенными ортогональными парами электродов датчика по осям j его чувствительности, определение коэффициентов передачи Кj датчика путем его установки на известный угол наклона αj, измерение (вычисление) ортогональных составляющих зенитного угла в функции преобразования βαj=f(Кj, Uαj) для определения основной погрешности датчика при его наклоне на угол αj, измерение зенитного и визирного углов или их вычисление по тригонометрическим формулам; после установки датчика под углом αj производится его нагревание (охлаждение) в рабочем диапазоне температур и измерение одновременно с сигналом Uij дифференциальных пар выходного сигнала Uiz, пропорционального электрическому сопротивлению zi параллельно включенной ортогональной пары электродов датчика, вычисляется действительное (текущее) значение коэффициентов передачи Кij дифференциально включенных ортогональных пар электродов, составляется непрерывная зависимость Kij=f(Uiz), которая используется для вычисления ортогональных составляющих зенитного угла в функции преобразования:
βij=f(Kij(Uiz)·Uij,
где i - момент времени измерения, при этом выходной сигнал может быть пропорционален только активной или только реактивной составляющей параллельно включенных ортогональных пар электродов.
Способ обеспечивает высокую точность измерения ортогональных составляющих зенитного угла и конечного результата - зенитного и визирного углов независимо от температурной нестабильности и инерционности датчика.
Датчик позволяет по сигналу Uiz, так же как и устройство [6], регистрировать удары и ускорение вдоль оси z и принимать сейсмические сигналы, однако чувствительность его из-за неподвижных измерительных электродов очень мала, а диапазон рабочих частот низок. Датчик не может быть использован в качестве гравиметра, гидрофона или геофона.
Техническая задача, на решение которой направлено настоящее изобретение, состоит в создании способа и устройства для одновременного определения параметров гравитационного и волнового полей как в ультразвуковой, так и в высокочастотной областях колебаний, в повышении диапазона и точности определения угловых координат объекта, ускорения его движения, в расширении области применения: для геофизических и гидродинамических исследований скважин, гравиразведки, сейсмографии, сейсморазведки, метеорологии, в навигационной технике, строительстве шахт и подземных выработок, охране гражданских и военных объектов.
Технический результат от использования данного изобретения состоит в том, что может быть не только существенно расширена область применения, увеличен диапазон, повышена точность определения известных параметров гравитационного и волновых полей при одновременном уменьшении габаритов и увеличении направленности приема датчика, но и получена принципиально новая информация о наземных, подводных и подземных геологических объектах, необходимая для разведки и разработки жидких и твердых полезных ископаемых, а также для целей гражданской обороны при чрезвычайных обстоятельствах (землетрясения, оползни, военные действия).
Указанная задача достигается тем, что согласно способу для определения параметров гравитационного и волнового полей электролитическим датчиком, содержащим неподвижные и подвижный измерительные электроды и имеющим инерционную массу, состоящую из твердой части, содержащей упругий элемент и подвижный электрод, и жидкой (несжимаемой) части - электролита, которая совместно с измерительными электродами служит электрическим преобразователем, включающему измерение выходного сигнала по осям чувствительности датчика при дифференциально включенных сопротивлениях электролита между подвижным и неподвижными электродами, определение коэффициентов передачи датчика при установке его на известный зенитный угол в гравитационном поле, определение основной погрешности датчика при его наклоне относительно вектора гравитационного поля, установку датчика вертикально и нагревание или охлаждение датчика в рабочем диапазоне температур и измерение выходного сигнала Uij при дифференциально включенных сопротивлениях электролита между подвижным и неподвижными электродами датчика и выходного сигнала Uiz при их параллельном включении, определение коэффициента передачи Кij, составление непрерывной зависимости Кij=f(Uiz) для определения составляющей направления гравитационного вектора вдоль оси чувствительности j с корректировкой по Uiz, запись при полевых или скважинных измерениях сигналов датчика Uij, пропорциональных воздействию силы от суммарного ускорения гравитационного и волнового полей в каждый момент времени t: Fj=m(gtcos ϕij+αik cos θtkj),
где m - инерционная масса:
m=m1+m2 (m1 - твердая часть; m2 - жидкая часть);
gt - ускорение силы тяжести в гравитационном поле;
αtk - ускорение в волновом поле;
αtk=fi(ωk), ωk - спектральная частота волнового поля;
ϕij - угол между направлением оси чувствительности j и вектором гравитационного поля (при ωk=0);
θtkj - угол между направлением вектора волнового поля (вектора, перпендикулярного касательной плоскости к фронту волны) и осью j при ωk>0.
определение по записанным сигналам параметров полей с использованием методов частотной фильтрации и частотных спектров.
Указанная задача достигается также тем, что устройство для определения параметров гравитационного и волнового полей содержит электролитический датчик, включающий корпус из проводящего материала с полостями, заполненными электролитом, представляющим собой раствор ионофора - калия гексафторофосфата (K[PF6]) в жидком органическом растворителе - пропиленкарбонате (С4Н6O3), характеризующийся числами переноса количества электричества катионов и анионов ионофора, близкими к 0,5, неподвижные измерительные электроды на изоляторах, жестко соединенные с корпусом, подвижный измерительный электрод, проводящие электрический ток упругие элементы, жестко соединенные вдоль оси чувствительности датчика одними концами с подвижным измерительным электродом, а другими концами - с корпусом, при этом подвижный электрод имеет возможность перемещаться относительно неподвижных электродов под воздействием гравитационного или волнового полей на инерционную массу, состоящую из твердой части, образованной упругим элементом и подвижным электродом, и несжимаемой жидкой части - электролита, контактирующего с внутренней поверхностью корпуса, упругим элементом, подвижным и неподвижным измерительными электродами с возможностью перетекания, а измерительные электроды соединены с измерительной мостовой схемой с возможностью дифференциального и параллельного включения сопротивлений электролита между подвижным и неподвижными электродами.
Устройство может содержать три электролитических датчика, установленные на объекте по взаимно перпендикулярным осям координат jx, iy, jz, для определения угловых координат объекта относительно гравитационного поля: cos2α+cos2β+cos2ϕ=1,
где α, β, ϕ - углы соответственно между осями jx, jy, jz объекта и вектором гравитационного поля.
В результате способ и устройство приобретают качественно новое содержание, позволяя рассматривать гравитационное поле и его изменение как непрерывное волновое поле в области инфранизких частот до нуля Гц, расширяется их область применения для геофизических исследований скважин, разведочной геофизики, для определения параметров гравитационного и волнового полей в скважинах, подземных выработках, на море, земной поверхности, метеорологии, сейсмографии, прогнозе землетрясений, в навигационной технике, а также охране гражданских и военных объектов.
Известны технические решения, в которых имеются признаки, сходные с заявленными в предлагаемом способе и устройстве.
Так, например, в способе и устройстве гравиметрической разведки [1] определяется приращение ускорения Δg силы тяжести по оси координат z гравиметрами относительно базовой сети или от точки к точке наблюдения. Измерения выполняются неподвижным гравиметром, что необходимо для успокоения инерционной системы, при этом инфранизкочастотные колебания в непрерывном частотном спектре (до нуля Гц) гравиметрами не регистрируются из-за малой их чувствительности. Даже при значительной амплитуде до 0,4 мГал зарегистрированные явления бывают необъяснимыми, т.е. существующие способ и устройства гравиразведки не позволяли рассматривать гравитационное поле и его изменение как волновое поле. Такая же аналогия может быть проведена и с сейсмическим полем, полем давления и их изменениями. Технические решения, описанные в [3-6], при помощи геофона, гидрофона и сейсмографа пытались преодолеть этот инфранизкочастотный барьер, достигая в лучшем случае результата до 0,1 или 0,01 Гц. С другой стороны, дифференциальные датчики давления [7-9], обладая достаточной чувствительностью к изменению давления или пульсаций его с низкой частотой, не могли служить для приема инфранизкочастотных и высокочастотных сейсмических колебаний или использоваться в качестве датчика гравиметра. Вместе с тем, ни одно из технических решений аналогов или прототипа не обеспечивает направленности приема инфранизкочастотных колебаний, чтобы по этому дополнительному критерию разделять гравитационные и волновые поля, а также получать высокоточную информацию об изменении гравитационного и волнового полей при технически достижимых высоких (свыше 100 МПа) давлениях и температурах (до 250°С).
Дополнительным преимуществом заявленного способа и устройства является также то, что обеспечивается измерение в динамическом режиме составляющих полного гравитационного вектора и его изменения по осям координат на движущемся объекте и угловые координаты направления на возмущающий источник инфранизкочастотных колебаний, что чрезвычайно важно для сейсмологии при определении предвестников и месторасположения будущих эпицентров землетрясений.
Таким образом, ни одно из решений аналогов не позволяет осуществить одновременное, точное определение параметров гравитационного и волнового полей и их взаимную ориентировку, в том числе при значительных изменениях температуры и гидростатического давления окружающей среды.
Только одновременное измерение параметров гравитационного и волновых полей единым компенсированным по давлению электролитическим датчиком, имеющим твердую упругую и жидкую (несжимаемую) составную инерционную массу с электролитом, составленным на основе ионофора - калия гексафторофосфата и органического растворителя - пропиленкарбоната, подвижные и неподвижные электроды в качестве электрического преобразователя, учет температурного дрейфа коэффициента передачи электрического преобразователя, разделение полученной информации (угловое положение, амплитуда, частота, фаза) с использованием методов частотной фильтрации. амплитудно-частотных и фазочастотных спектров и установка датчиков на объекте по осям его координат, позволяют решить поставленную техническую задачу и достичь принципиально нового эффекта. Поэтому предложенное решение обладает существенными отличиями.
Перечень чертежей и иных материалов с кратким пояснением.
Фиг.1 - Устройство электролитического датчика.
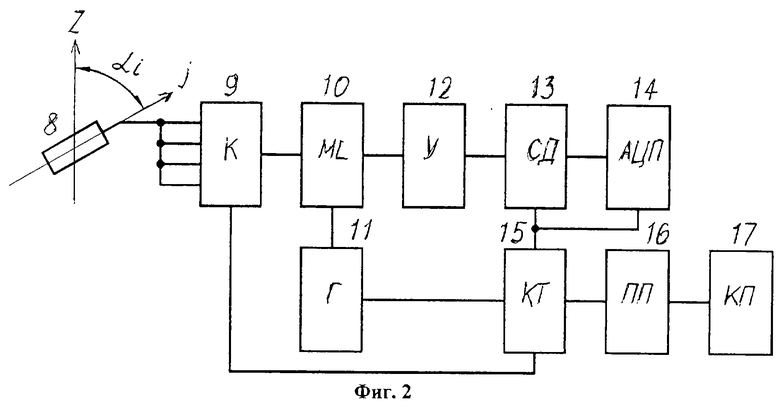
Фиг.2 - Электрическая блок-схема датчика.
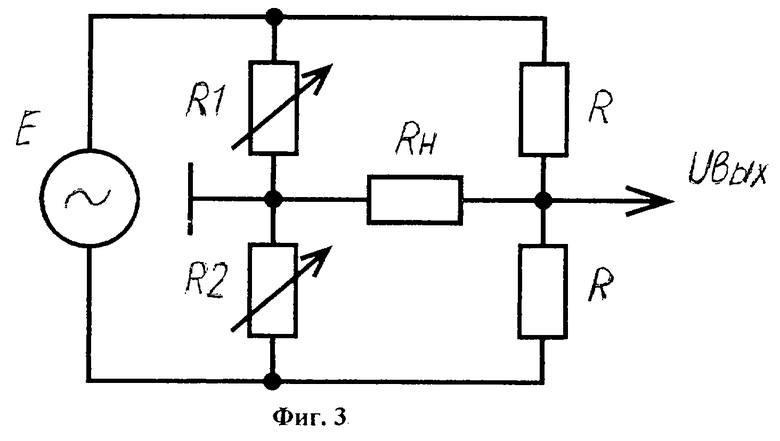
Фиг.3 - Дифференциальная схема включения измерительных электродов датчика.
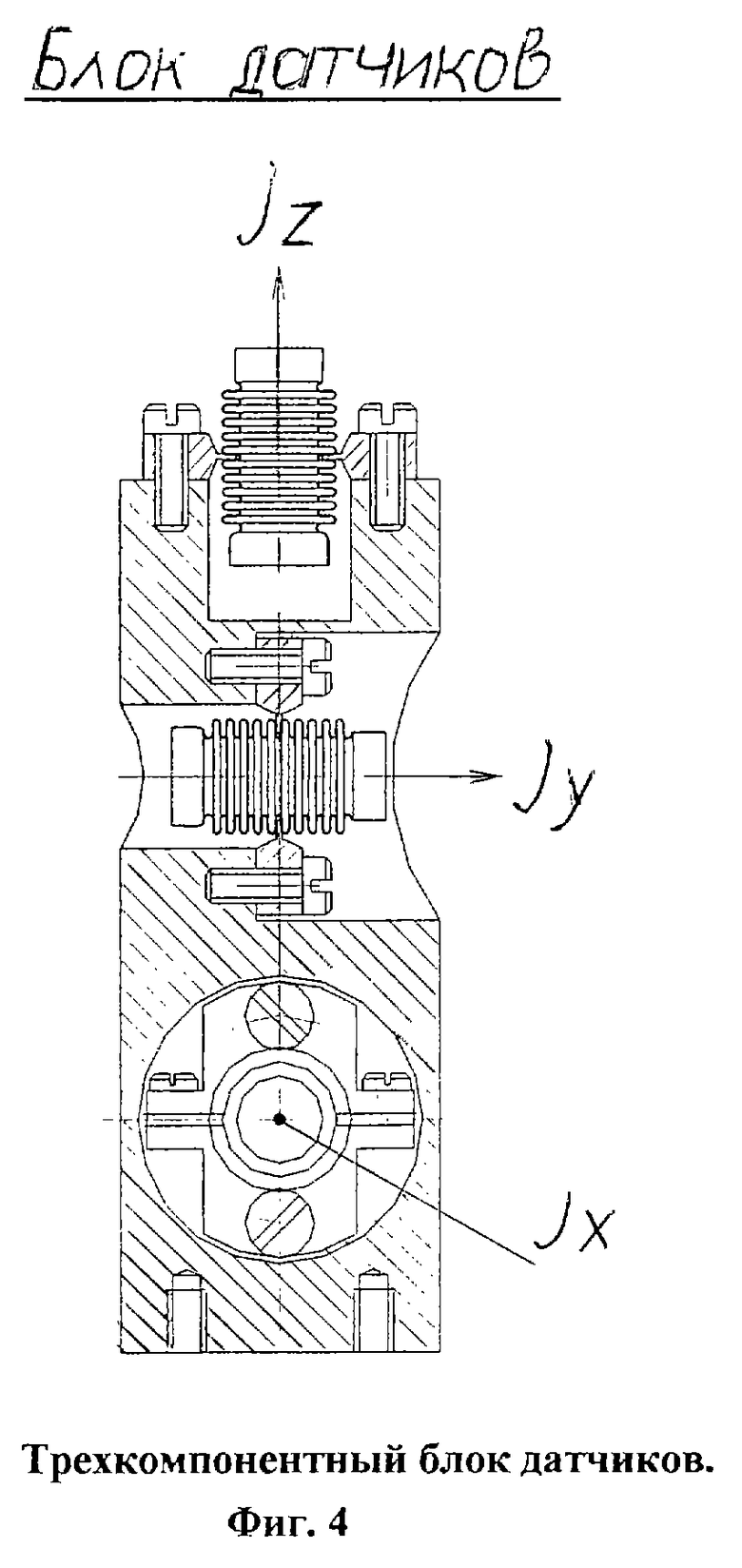
Фиг.4 - Трехкомпонентный блок датчиков.
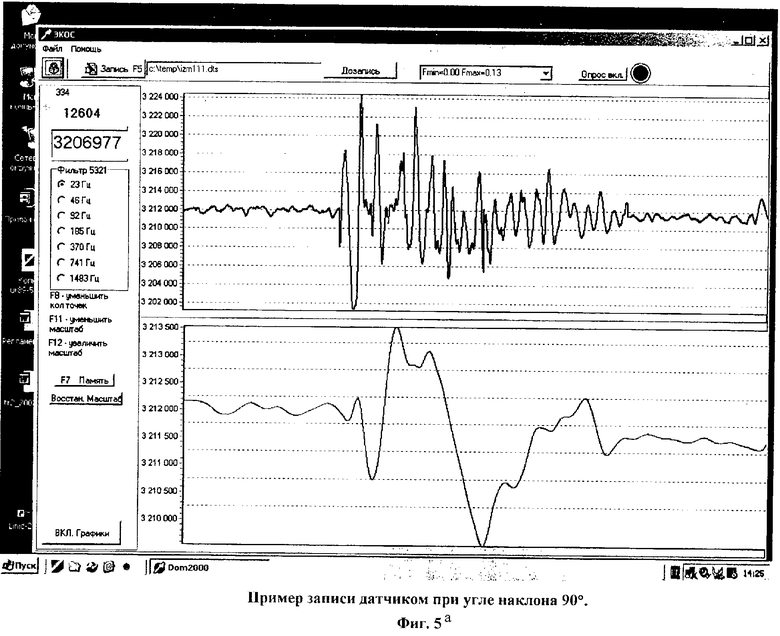
Фиг.5а - Пример записи датчиком при угле наклона 90°.
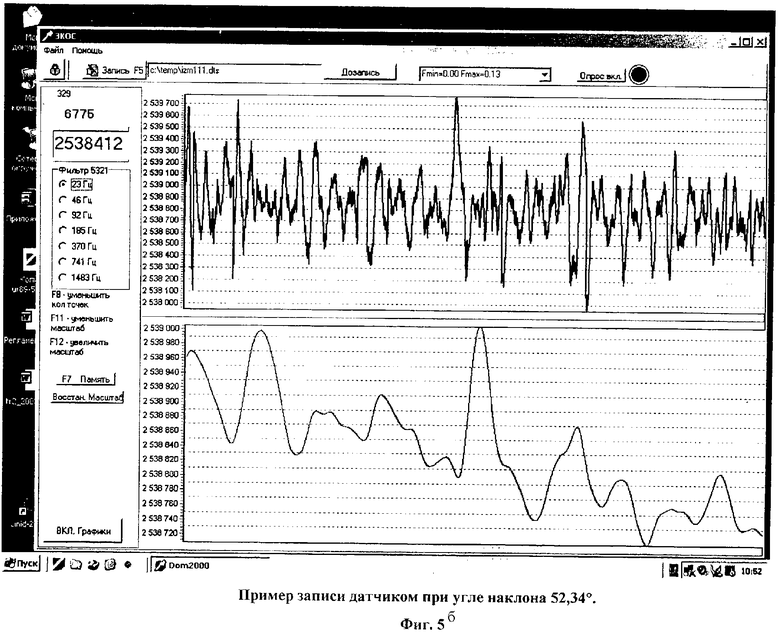
Фиг.5б - Пример записи датчиком при угле наклона 52,34°.
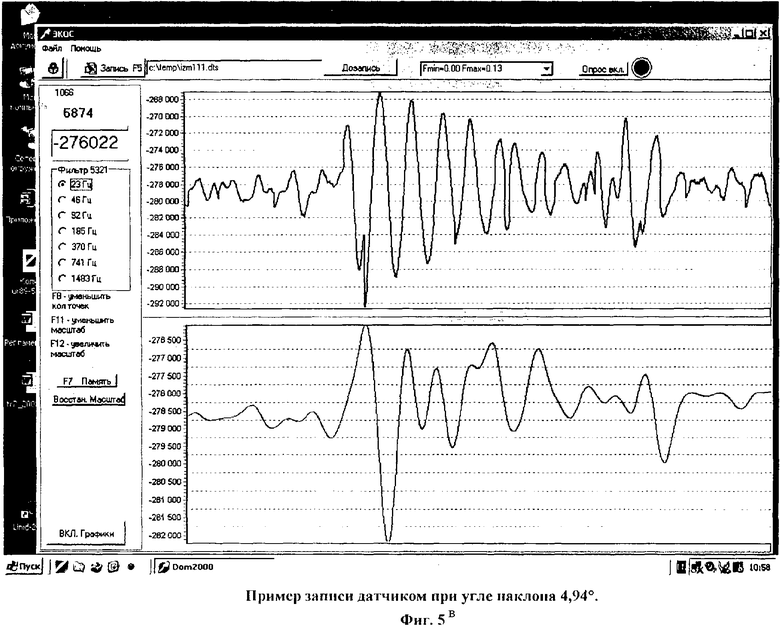
Фиг.5в - Пример записи датчиком при угле наклона 4,94°.
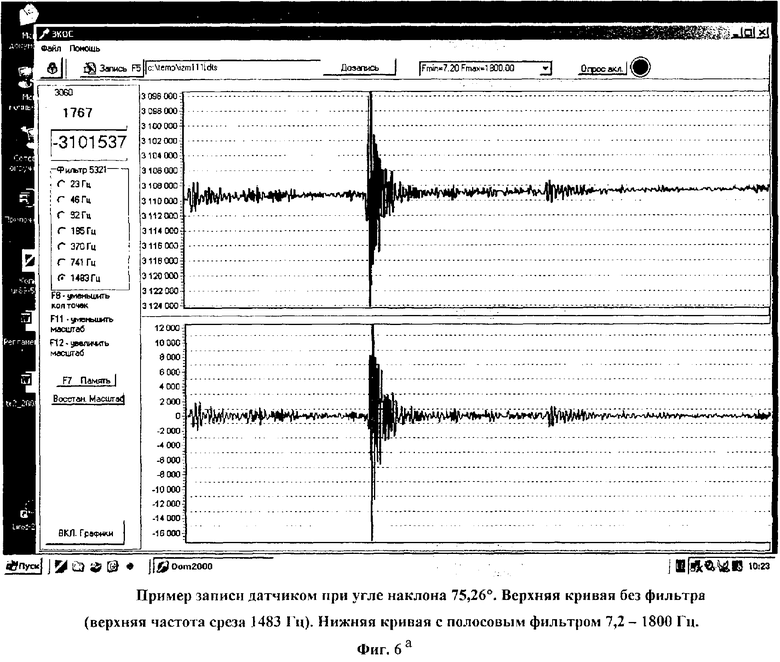
Фиг.6а - Пример записи датчиком при угле наклона 75,26°. Верхняя кривая без фильтра (верхняя частота среза 1483 Гц). Нижняя кривая с полосовым фильтром 7,2-1800 Гц.
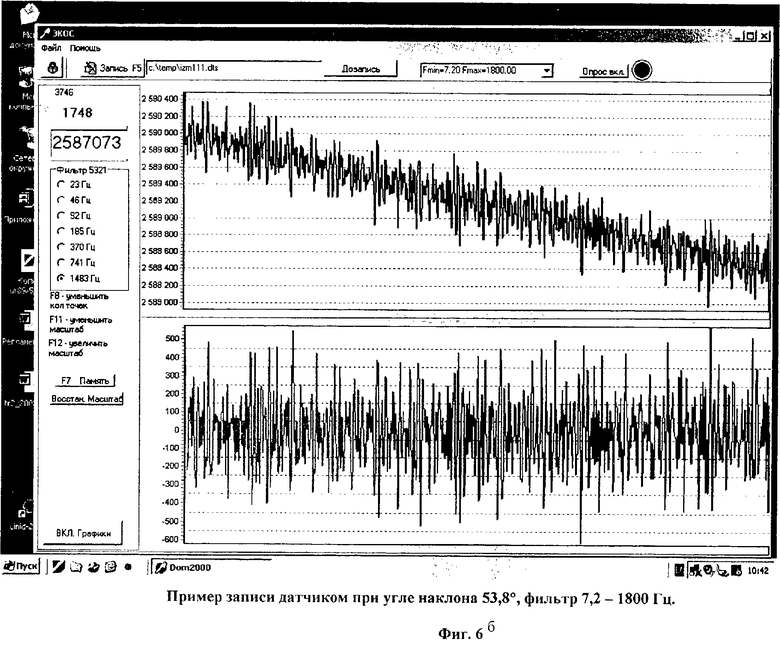
Фиг.6б - Пример записи датчиком при угле наклона 4,94°, фильтр 7,2-1800 Гц.
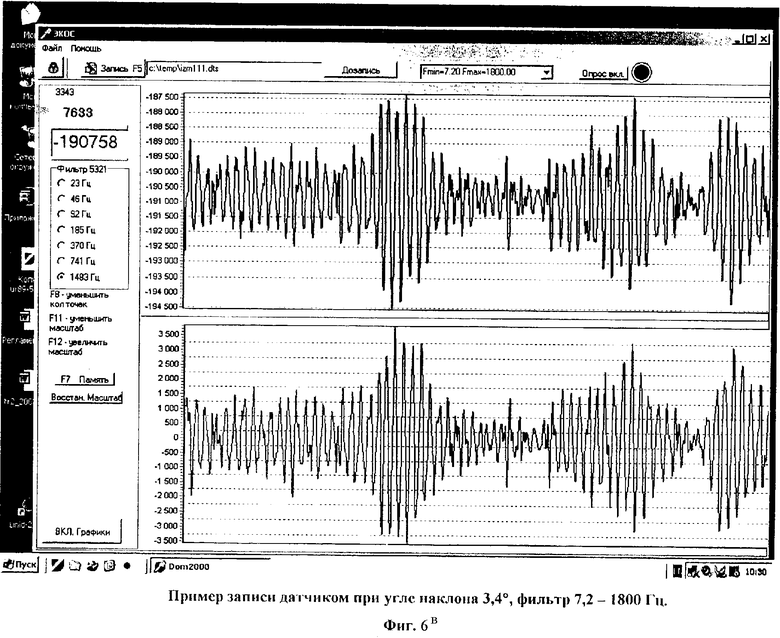
Фиг.6в - Пример записи датчиком при угле наклона 3,4°, фильтр 7,2 -1800 Г.
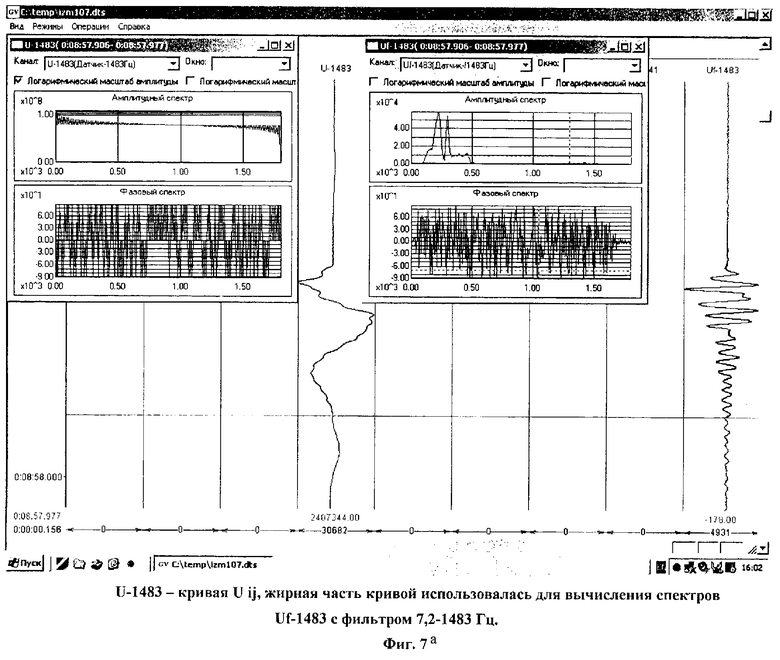
Фиг.7а - U-1483 - кривая Uij, жирная часть кривой использовалась для вычисления спектров Uf-1483 с фильтром 7,2-1483 Гц.
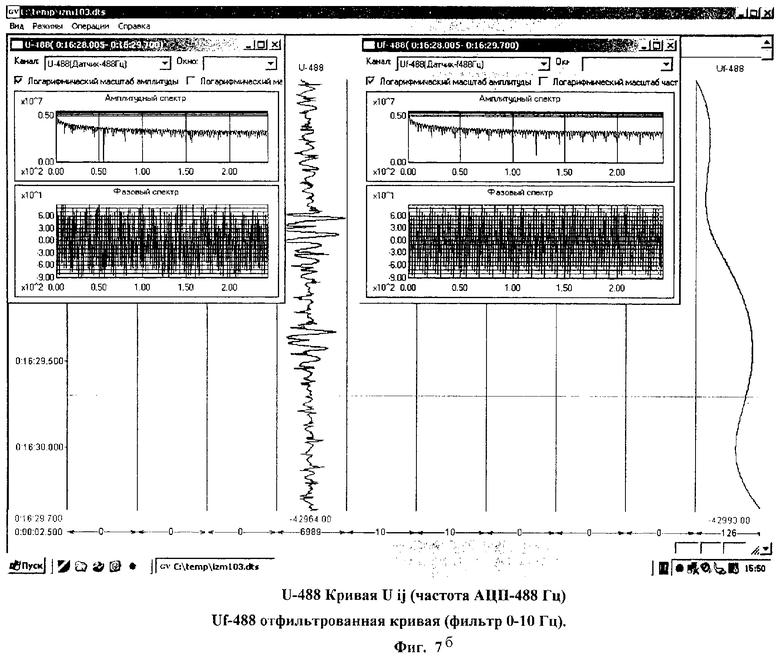
Фиг.7б - U-488 Кривая Uij (частота АЦП-488 Гц). Uf-488 отфильтрованная кривая (фильтр 0-10 Гц).
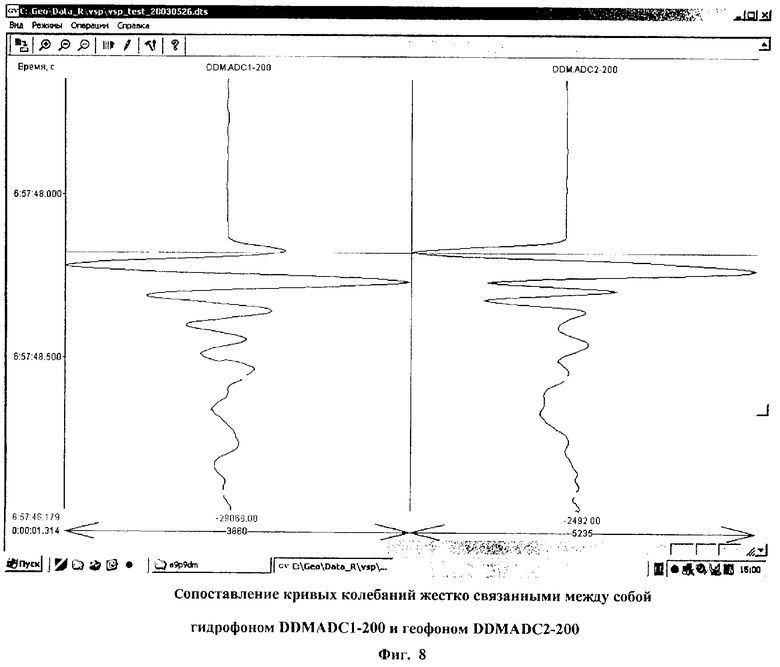
Фиг.8 - Сопоставление кривых колебаний жестко связанными между собой гидрофоном DDMADC1-200 и геофоном DDMADC2-200.
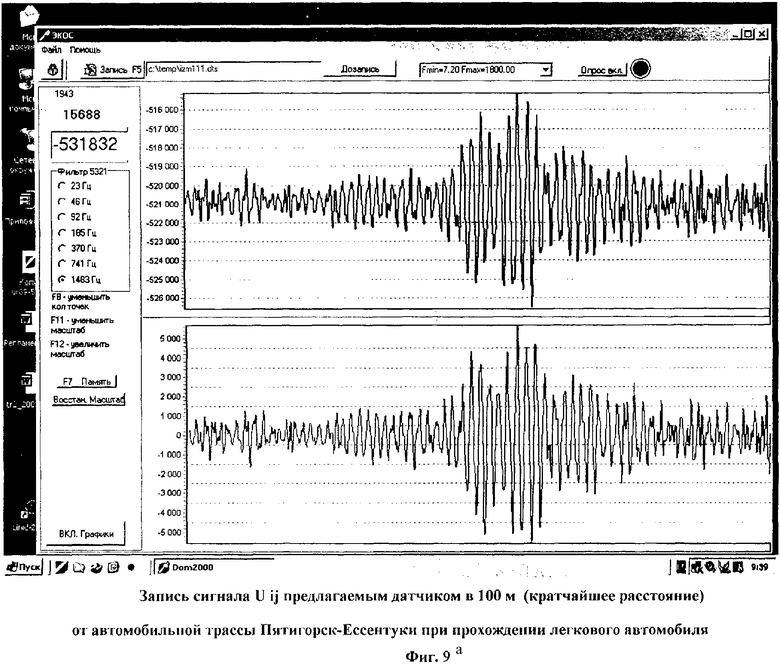
Фиг.9а - Запись сигнала Uij предлагаемым датчиком в 100 м (кратчайшее расстояние) от автомобильной трассы Пятигорск-Ессентуки при прохождении легкового автомобиля.
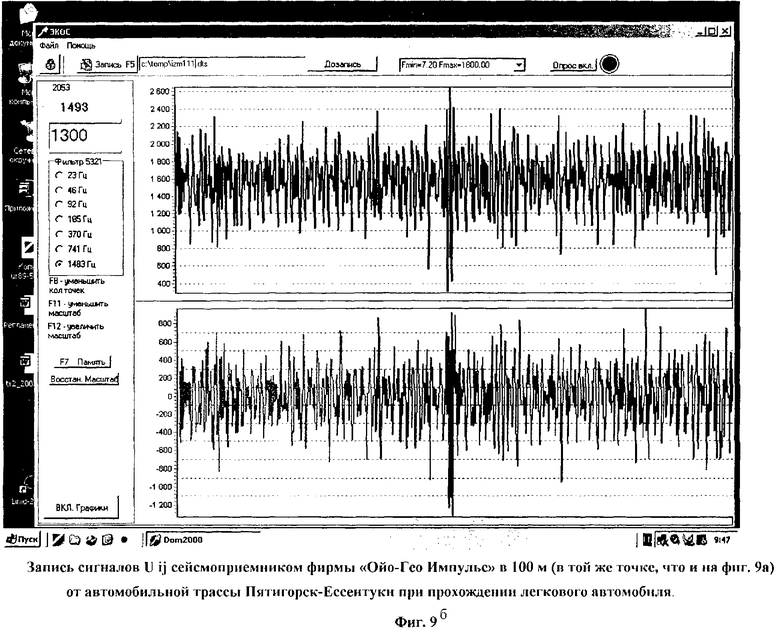
Фиг.9б - Запись сигналов Uij сейсмоприемником фирмы «Ойо-Гео Импульс» в 100 м (в той же точке, что и на фиг.8) от автомобильной трассы Пятигорск-Ессентуки при прохождении легкового автомобиля.
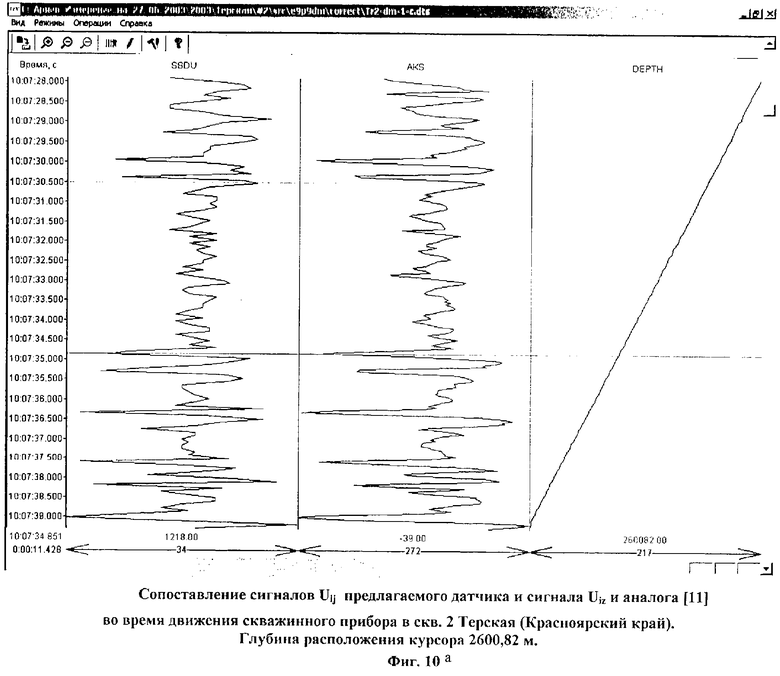
Фиг.10а - Сопоставление сигналов Uij предлагаемого датчика и сигнала Uiz аналога [11] во время движения скважинного прибора в скв. 2 Терская (Красноярский край). Глубина расположения курсора 2600,82 м.
Фиг.10б - Сопоставление сигналов Uij предлагаемого датчика и аналога [11] в скв. 2 Терская. Остановка прибора на глубине 2574,17 м.
Предложенный способ реализуется с помощью электролитического датчика (фиг.1, 4) и электрической схемы (фиг.2-3).
Датчик (фиг.1) содержит корпус 1 из проводящего материала, неподвижные измерительные электроды 2 на изоляторах 3, жестко соединенные с корпусом 1, проводящие электрический ток упругие элементы в виде металлических сильфонов (сильфона) 4, подвижный измерительный электрод 5, жестко соединенный с сильфонами 4, другие концы которых жестко соединены с корпусом 1, полости 6, заполненные вакуумированным электролитом, с распределенными демпфирующими зазорами, изолированные электровводы 7 для подвода электрического тока к неподвижным измерительным электродам. Электрический ток к подвижному измерительному электроду подводится через проводящий корпус 1 и металлические сильфоны 4.
Электрическая блок-схема (фиг.2) включает электролитический датчик 8, коммутатор 9, мостовую цепь 10, генератор 11, усилитель 12, синхронный детектор 13, аналого-цифровой преобразователь (АЦП) 14, контроллер 15, приемопередатчик 16, компьютер 17.
Мостовая цепь 10 и коммутатор 9 позволяют измерить с помощью АЦП 14 сигналы датчика 8, пропорциональные электрическому сопротивлению (импедансу) дифференциального и параллельного включения измерительных электродов.
На фиг.3 приведена дифференциальная схема включения измерительных электродов датчика. Здесь Е - переменное напряжение генератора для питания мостовой схемы, R1 и R2 - сопротивление электролита (импеданс) между неподвижным и подвижным электродами датчика, R - дополнительное сопротивление моста. Rn - сопротивление нагрузки.
Параллельная схема включения электродов датчика отличается от дифференциальной тем, что сопротивления (импедансы) R1 и R2 датчика включены параллельно, образуя одно измерительное плечо мостовой схемы.
Сигналы разбаланса моста 8-10 дифференциального Uij и параллельного Uiz включения электродов коммутируются коммутатором 9, усиливаются усилителем 12, детектируются синхронным детектором 13, оцифровываются АЦП 14 и через контроллер 15 и приемопередатчик 16 передаются на компьютер 17.
Трехкомпонентный блок датчиков (фиг.4) включает в себя три датчика, установленные по взаимно перпендикулярным осям jx, jy, jz.
Предложенный способ реализуется следующей последовательностью операций.
1. Датчик поверяется по измеряемым параметрам гравитационного поля с применением камеры тепла и холода, поверочной установки, оптического квадранта для измерения угловых координат и математического маятника для измерения ускорения силы тяжести (или наблюдения ее в пункте опорной гравиметрической сети).
По записанным компьютером при поверке выходным сигналам, пропорциональным импедансам дифференциального Uij=Кij и параллельного Uiz включения измерительных электродов с применением фильтра нижних частот, например 0-0,13 Гц, и усреднением данных за определенный промежуток времени i=t, вычисляется основная погрешность при 20°С электролитического датчика с изменением его угла наклона относительно вертикали (табл.1).
Основная погрешность опытного образца электролитического датчика (t=25°C)
Затем датчик устанавливается вертикально (угол αj=90°) в камеру тепла и холода, и путем нагревания и охлаждения в рабочем диапазоне температур определяются коэффициенты передачи датчика по каждой из осей j при дискретных значениях температуры окружающей среды в функции Uij=Кij (табл.2). Значение Uij при расчетах угла наклона в скважине вдоль оси j корректируется по Uiz с применением линейной интерполяции, т.е. по непрерывной зависимости Кij=f(Uiz), составленной по данным табл.2.
Выходные сигналы опытного образца электролитического датчика, пропорциональные импедансам дифференциального Uij=Кij и параллельного Uiz включения пары электродов по оси j
Оценка точности и работоспособности способа проведена по сопоставлению погрешности измерения датчиком угловых координат гравитационного вектора при температуре 200°С среды, окружающей датчик (табл. 3) с основной погрешностью при температуре 20°С (табл.1).
Погрешность опытного образца электролитического датчика (t=200°C)
 где
где  - коэффициент, учитывающий температурные изменения сигнала Uiz.
- коэффициент, учитывающий температурные изменения сигнала Uiz.
Из сопоставления данных табл.1 и 3 видно, что погрешности датчика Δβαj не превышают величины 0,08° для углов наклона ±90° от вертикали, при этом случайная погрешность не превышает величины 0,001°, что значительно превосходит результаты аналога [11] как по диапазону углов, так и погрешности их измерения.
2. Во время полевых или скважинных измерений производится запись сигналов датчиков Uij, пропорциональных воздействию силы Fij от суммарного ускорения гравитационного и волнового полей в момент времени i однокомпонентным (см. фиг.1) или трехкомпонентным блоком датчиков (см. фиг.4) по известным методикам наблюдения геофизических исследований скважин, гравиразведки, сейсморазведки, ВСП и т.д., по которым вычисляются с использованием методов частотной фильтрации, амплитудочастотных и фазочастотных спектров, следующие параметры:
2.1. Гравитационного поля с применением низкочастотного фильтра, например 0-0,013 Гц, и усреднением данных Uij (Uijx, Uijy, Uijz) за промежуток времени Δt, больший периода низкочастотной помехи (фиг.5 а-в), при разных углах наклона оси j:
- полная амплитуда (модуль) гравитационного вектора 
- направляющие косинусы:
Как видно из фиг.5, параметры гравитационного и сейсмического полей уверенно регистрируются при любом положении оси j датчика в гравитационном поле.
2.2. Волнового поля с применением полосовых фильтров (для сейсмического поля в узком диапазоне частот, например 7,2-1800 Гц) по каждой из трех взаимно перпендикулярных осей чувствительности датчика jx, jy, jz, при этом:
2.2.1. Выполняется корреляция сигналов Uj по осям jx, jy, jz, нумеруются последовательно амплитуды сигнала во временном окне Δt и определяется их амплитуда, по каждой из которых определяется полная величина энергии (модуль) волны  и ее направляющие косинусы по осям координат датчика
и ее направляющие косинусы по осям координат датчика

 а следовательно, и угол или направление волны по отношению к гравитационному вектору.
а следовательно, и угол или направление волны по отношению к гравитационному вектору.
На фиг.6а-в показан пример регистрации Uij с углом наклона оси j под углом (-)75,26° (верхняя кривая) и с применением более высокочастотного полосового фильтра 7,2-1800 Гц (нижняя кривая).
2.2.2. В заданном окне Δt вычисляются амплитудно- и фазочастотные спектры колебаний по осям jx, jy, jz и для любой частоты определяются амплитуды αx, αу и αz, по которым вычисляются те же параметры, что и в п.2.2.1, а фазовый спектр используется для дополнительной идентификации волн. Примеры вычисления амплитудно- и фазочастотных спектров показаны на фиг.7 а-б.
На фиг.8 приведены сигналы Uij колебаний в яме глубиной 2 м, заполненной илом и водой, записанные скважинным прибором ВСП одновременно двумя соосными датчиками, расположенными в одной и той же точке наблюдения и соединенными между собой жестко металлическим кольцом, при этом датчик ДДМ АДС2-200 был включен в режиме геофона, а датчик ДДМ АДС 1-200 - в режиме гидрофона.
Как видно, кривые Uj очень хорошо коррелируются между собой. Ясно видны фазовые сдвиги, по которым можно распознать обменные волны.
На фиг.9а-б приведены записи сигналов Uij предлагаемым датчиком и сейсмоприемником фирмы «Ойо-Гео Импульс». Записи разновременные в одной и той же точке в 100 м от автомобильной трассы. Из сопоставления фиг.9а и 9б видно, что чувствительность предлагаемого датчика в сопоставимом диапазоне частот 7,2-1800 Гц выше, чем у сейсмоприемника фирмы «Ойо-Гео Импульс», примерно в 6 раз и значительно выше (на 2-3 порядка) в более низкочастотном диапазоне 0-10 Гц.
На фиг.10 показан пример регистрации сигнала Ujj изменения давления промывочной жидкости в скважине и волнового поля от движения прибора, ось j заявленного датчика расположена в плоскости, близкой к горизонтальной, при чувствительности датчика 3 мВ/Па (против 120 мкВ/Па у лучшего аналога - геофона-гидрофона фирмы «Си Технолоджи») или 400 мВ/g (кривая АКС) в сопоставлении с сигналом Uiz датчика прототипа (кривая SSDU), расположенного осью z близко к вертикали (1-1,5°).
Как видно, кривые АКС и SSDU при движении прибора в скважине очень похожи друг на друга (коэффициент корреляции близок к 1). Они отражают изменение параметров волнового поля (промывочной жидкости), вызванные движением (подпрыгиванием) скважинного прибора с переменной скоростью (от 0 до 1000 м/ч) и ударами его о стенку скважины. На останове скважинного прибора такой корреляции нет. Видно, что чувствительность предложенного датчика в абсолютных единицах по ускорению движения или ударам на порядок выше аналога [11], но волновые картины схожи.
Из сопоставления кривых Uij одноосного датчика, расположенного на физическом маятнике горизонтально при отсутствии его колебаний, и далее при свободных колебаниях маятника под некоторым углом к гравитационному вектору и развороте оси j датчика последовательно в двух взаимно перпендикулярных плоскостях jx и jy, а также в вертикальном положении по оси jz, было установлено, что датчик имеет выраженную направленность не только в отношении ускорения силы тяжести, но и по отношению к направлению качания. Приращения синусоидального сигнала от раскачивания маятника составили по указанным осям: ΔUjzmax=800986, ΔUjxmax=180528, ΔUjymax=475203 или направляющие косинусы: cosα^z=0,84. cosα^x=0,19, cosα^y=0,50, т.е. имеется явная направленность к приему волн сейсмоакустического поля и поля давления.
Как видно, ни один из аналогов ни по родовым понятиям, ни по описанию не могут быть использованы в качестве наиболее близких аналогов заявленных способа и устройства, поэтому независимые пункты формулы изобретения излагаются без разделения на ограничительную и отличительную части.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Краткий справочник по полевой геофизике. М., Недра, 1977 г., стр.68-129.
2. Кривко Н.Н. и др. Промыслово-геофизическая аппаратура и оборудование. М.: Недра. 1981, c.32-38.
3. Вольвовский Б.С., Кунин Н.Я., Терехин Е.И. Краткий справочник по полевой геофизике. М.: Недра, 1977 г., с.252-254.
4. Запорожец Б.В. и др. Универсальный двухкомпонентный датчик для сейсморазведки в условиях мелководья, транзитных зон и прилегающей к ним суше. Ж. «Приборы и системы разведочной геофизики» (издание Саратовского отделения ЕАГО) №2(02) 2002 г., стр.14-15. ООО «Си Технолоджи» г. Геленджик.
5. Григорьев Г.В. и др. НВ НИИ ГГ, г. Саратов. «Пьезоэлектрические преобразователи от инфразвука до ультразвука». Ж. «Приборы и системы разведочной геофизики» №02(02) 2002 г., стр.21.
6. Патент РФ №2128850. Сиротинский и др. Трехкомпонентный приемник акустических колебаний.
7. Малогабаритные измерительные преобразователи (датчики) с компенсацией магнитных потоков. Техническое описание и инструкция по эксплуатации 08902 055 ТО. 1987 г.
8. Тензопреобразователи. Руководство по эксплуатации ПБЦО. 40 8854.000 РЭ, 2000 г.
9. Екогава Дэнки К.К. Датчик для измерения разности давлений. Япония, заявка №63-2332. МКИ 4 G 01 L 13/02. заявл. 55-116345, 80 08 23, опубл. 88. 01. 18.
10. Лисов В.Н., Кривоносов Р.И., Дейнега Г.А. Рабочая жидкость электролитического резистивного преобразователя. Пат. РФ №2172932. МКИ 7 G 01 С 9/18, з. №2000123731/28, 14.09.2000, опубл. 27.08.2001, бюл. №24.
11. Кривоносов Р.И. и др. Способ определения зенитного и визирного углов скважины. Патент РФ №2017950. з. №4935054. 06.05.1991. Рег. 15.08.1994.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО И ВИЗИРНОГО УГЛОВ СКВАЖИНЫ | 1991 |
|
RU2017950C1 |
| РАБОЧАЯ ЖИДКОСТЬ ЭЛЕКТРОЛИТИЧЕСКОГО РЕЗИСТИВНОГО ПРЕОБРАЗОВАТЕЛЯ | 2000 |
|
RU2172932C1 |
| Низкочастотная двухкомпонентная донная сейсмическая коса | 2017 |
|
RU2687297C1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМОРАЗВЕДКИ И СЕЙСМОЛОГИЧЕСКОГО МОНИТОРИНГА | 2014 |
|
RU2572046C1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2304794C2 |
| ЦИФРОВОЙ РЕГИСТРИРУЮЩИЙ МОДУЛЬ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2019 |
|
RU2724964C1 |
| ПОДВОДНАЯ ГЕОФИЗИЧЕСКАЯ СТАНЦИЯ | 2010 |
|
RU2435180C1 |
| ПОДВИЖНЫЙ МОРСКОЙ АППАРАТ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2011 |
|
RU2478059C1 |
| Самовсплывающая портативная донная сейсмическая станция без оставления груза на дне моря | 2022 |
|
RU2796944C1 |
| СПОСОБ И УСТРОЙСТВО ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ОБСАЖЕННОЙ СКВАЖИНЫ | 2005 |
|
RU2306582C1 |

Изобретение относится к геофизической технике и касается способов и устройств для определения параметров гравитационного и волнового полей в скважинах, подземных выработках, на море, земной поверхности, летающих объектах. Технический результат: расширение области применения, увеличение частотного диапазона в сторону инфранизких частот и повышение точности при уменьшении габаритов и увеличении направленности приема. Сущность изобретения: параметры гравитационного и волнового полей определяют электролитическим датчиком, содержащим корпус с полостями, заполненными электролитом, неподвижные измерительные электроды, подвижный измерительный электрод, проводящие электрический ток упругие элементы, одними концами соединенные с подвижным измерительным электродом, а другими - с корпусом. Инерционная масса датчика состоит из твердой части, образованной упругим элементом и подвижным электродом, и жидкой части - электролита. По сигналам датчика определяют параметры полей с использованием методов частотной фильтрации и частотных спектров. 2 н. и 1 з.п. ф-лы, 10 ил., 3 табл.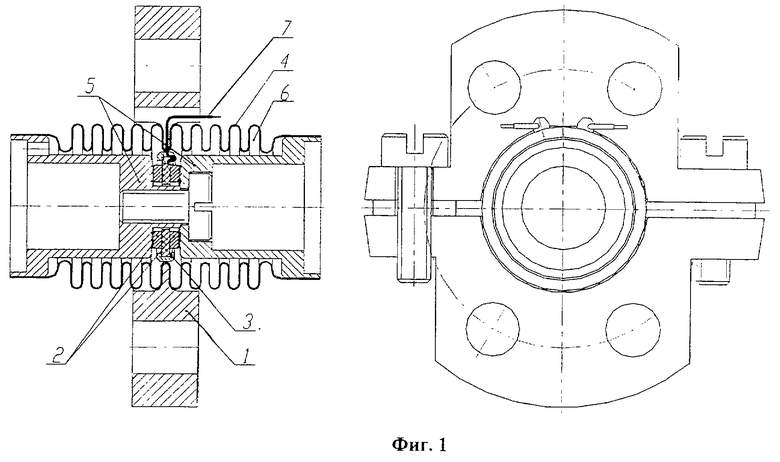
Fj=m(gt cos ϕtj+αtk cos θtkj),
где m - инерционная масса;
m=m1+m2 (m1 - твердая часть; m2 -жидкая часть);
gt - ускорение силы тяжести в гравитационном поле;
αtk - ускорение в волновом поле:
αtk=ft(ωk),ωk - спектральная частота волнового поля;
ϕtj - угол между направлением оси чувствительности j и вектором гравитационного поля (при ωk=0);
θtkj - угол между направлением вектора волнового поля (вектора, перпендикулярного касательной плоскости к фронту волны) и осью j при ωk>0,
определение по записанным сигналам параметров полей с использованием методов частотной фильтрации и частотных спектров.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРИРАЩЕНИЙ ГРАДИЕНТА СИЛЫ ТЯЖЕСТИ | 1994 |
|
RU2085973C1 |
| СПОСОБ ИЗМЕРЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1994 |
|
RU2089927C1 |
| RU 2055352 Cl, 27.02.1996 | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 4197522 A, 08.04.1980. | |||

