Изобретение относится к области измерительной техники и может быть использовано при измерении различных физических параметров в нестационарном температурном режиме термостатированными измерительными приборами, например термостатированными относительными гравиметрами.
Известен способ определения температурных поправок при измерениях нетермостатированным статическим гравиметром на основе учета инерционного запаздывания показаний гравиметра от изменения температуры (Гуляев П.Ю. Методика учета температурной динамики среды по результатам измерений. Цифровое картографирование, городской кадастр и ГИС: Научн.-техн. сб. по геодезии, аэрокосм, съемкам и картографии. М.: ЦНИИГАиК, 1996. - С. 78-83).
Недостатком данного способа является низкая точность измерений, вызванная большим диапазоном изменения температуры работы чувствительного элемента гравиметра.
Наиболее близким по технической сущности к предлагаемому изобретению является способ определения температурных поправок при измерениях нетермостатированным статическим гравиметром на основе учета инерционного запаздывания показаний гравиметра от изменения температуры, включающий проведение эталонных испытаний с определением реакции гравиметра на заданные изменения температурного режима, последующий выбор (построение) прогнозной рекуррентной динамической модели температурной инерционности гравиметра для вычисления температурных поправок по измеренным до рейса и во время рейса температурам прибора и определенным при эталонных испытаниях коэффициентам инерционности и последующего внесения вычисленных поправок в результаты измерений, отличающийся тем, что при выборе рекуррентной динамической модели изменения температуры для структурной идентификации модели в качестве переходной функции состояния используют вид термодинамической функциональной инерционной зависимости внутренней температуры системы от температуры внешней среды для случая линейного изменения температуры (см. патент №2207600, G01V 7/00, 2002), (см. патент РФ №2440592, 2010).
Недостатками данного способа являются низкая точность и достоверность гравиметрических измерений, т.к. не установлен вид переходной функции, выражающей инерционную зависимость показаний гравиметра от температуры, что приводит к существенным погрешностям определения температурной поправки.
Техническим результатом является повышение точности и достоверности гравиметрических измерений за счет уменьшения температурных погрешностей гравиметрических измерений статическим термостатированным гравиметром, увеличение продолжительности рейсов и сокращение количества опорных пунктов.
Технический результат достигается в способе компенсации нелинейной составляющей скорости дрейфа нуль-пункта статического термостатированного гравиметра при гравиметрических измерениях, включающем проведение эталонных гравиметрических измерений с одновременным измерением температуры корпуса гравиметра при различных температурах окружающей среды, высокочастотную фильтрацию результатов измерений от микросейсмических шумов, сейсмических событий, лунно-солнечного приливных явлений и барометрического эффекта с последующим определением линейной и нелинейной составляющих скорости дрейфа нуль-пункта статического гравиметра, создание модели эффективной температуры в виде набора апериодических звеньев первого порядка, параметры которых определяются по максимуму корреляции между скоростью дрейфа нуль-пункта гравиметра и эффективной температурой, построение графика зависимости скорости дрейфа нуль-пункта гравиметра от эффективной температуры, определение угла наклона аппроксимирующей прямой, тангенс которого является коэффициентом пересчета эффективной температуры в поправку, учитывающую нелинейную составляющую скорости дрейфа нуль-пункта гравиметра, проведение текущих гравиметрических измерений с одновременным измерением температуры корпуса гравиметра и определением линейной и нелинейной составляющих скорости дрейфа нуль-пункта гравиметра, с последующим определением эффективной температуры путем моделирования, вычисление поправки, компенсирующей нелинейную составляющую дрейфа нуль-пункта гравиметра, путем умножения полученной эффективной температуры на коэффициент пересчета эффективной температуры в поправку и внесение соответствующего значения вышеуказанной поправки в нелинейную составляющую скорости дрейфа нуль-пункта гравиметра при текущих гравиметрических измерениях.
Проведение эталонных гравиметрических измерений с одновременным измерением температуры корпуса гравиметра при различных температурах окружающей среды необходимо для создания модели эффективной температуры.
Высокочастотная фильтрация результатов измерений от микросейсмических шумов, сейсмических событий, лунно-солнечного приливных явлений и барометрического эффекта необходима для повышения достоверности значений линейной и нелинейной составлявших скорости ноль-пункта гравиметра.
Определение линейной и нелинейной составляющих скорости дрейфа нуль-пункта статического гравиметра необходимо для их разделения и дальнейшей компенсации нелинейной составляющей скорости дрейфа нуль-пункта статического гравиметра.
Создание модели эффективной температуры в виде набора апериодических звеньев первого порядка, параметры которых определяются по максимуму корреляции между скоростью дрейфа нуль-пункта гравиметра и эффективной температурой наилучшим образом соответствует скорости дрейфа нуль-пункта гравиметра.
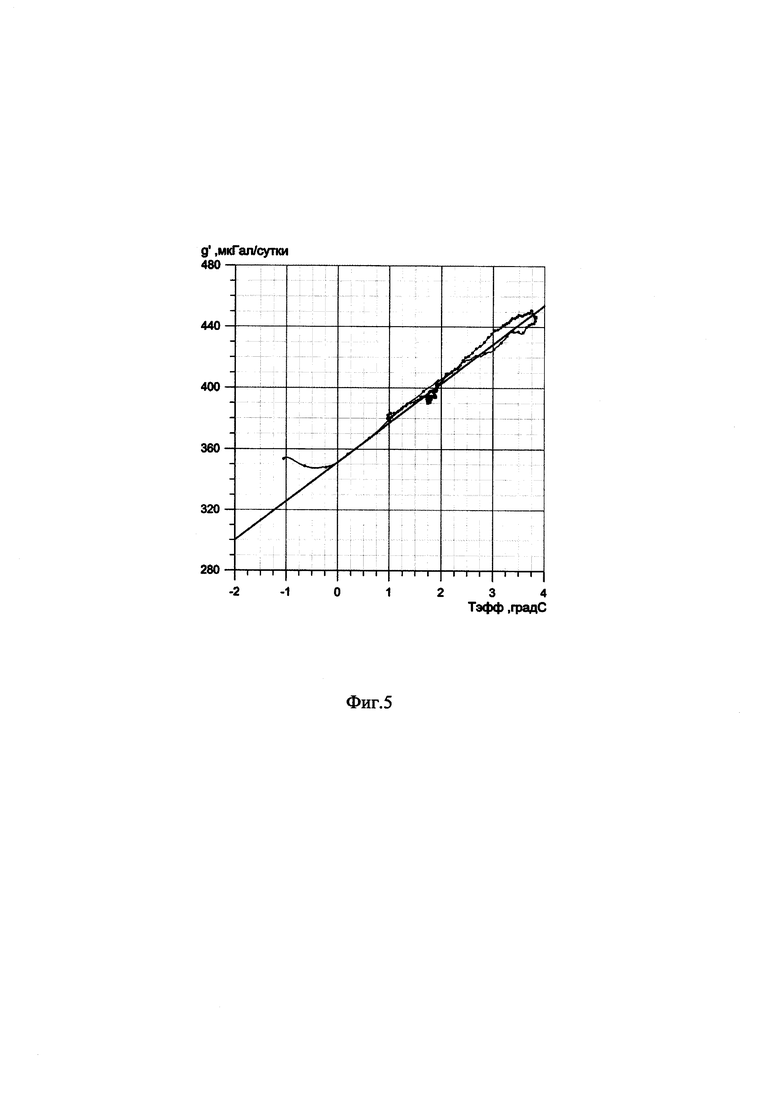
Построение графика зависимости скорости дрейфа нуль-пункта гравиметра от эффективной температуры и определение угла наклона аппроксимирующей прямой, тангенс которого является коэффициентом пересчета эффективной температуры в поправку, учитывающую нелинейную составляющую скорости дрейфа нуль-пункта гравиметра необходимо для определения величины поправки, учитывающей нелинейную составляющую скорости дрейфа нуль-пункта гравиметра.
Проведение текущих гравиметрических измерений с одновременным измерением температуры корпуса гравиметра и определением линейной и нелинейной составляющих скорости дрейфа нуль-пункта гравиметра, с последующим определением эффективной температуры путем моделирования необходимо для определения вышеуказанной поправки.
Вычисление поправки, компенсирующей нелинейную составляющую дрейфа нуль-пункта гравиметра, путем умножения полученной эффективной температуры на коэффициент пересчета эффективной температуры в поправку и внесение соответствующего значения вышеуказанной поправки в нелинейную составляющую скорости дрейфа нуль-пункта гравиметра при текущих гравиметрических измерениях позволяет повысить точность и достоверность гравиметрических измерений.
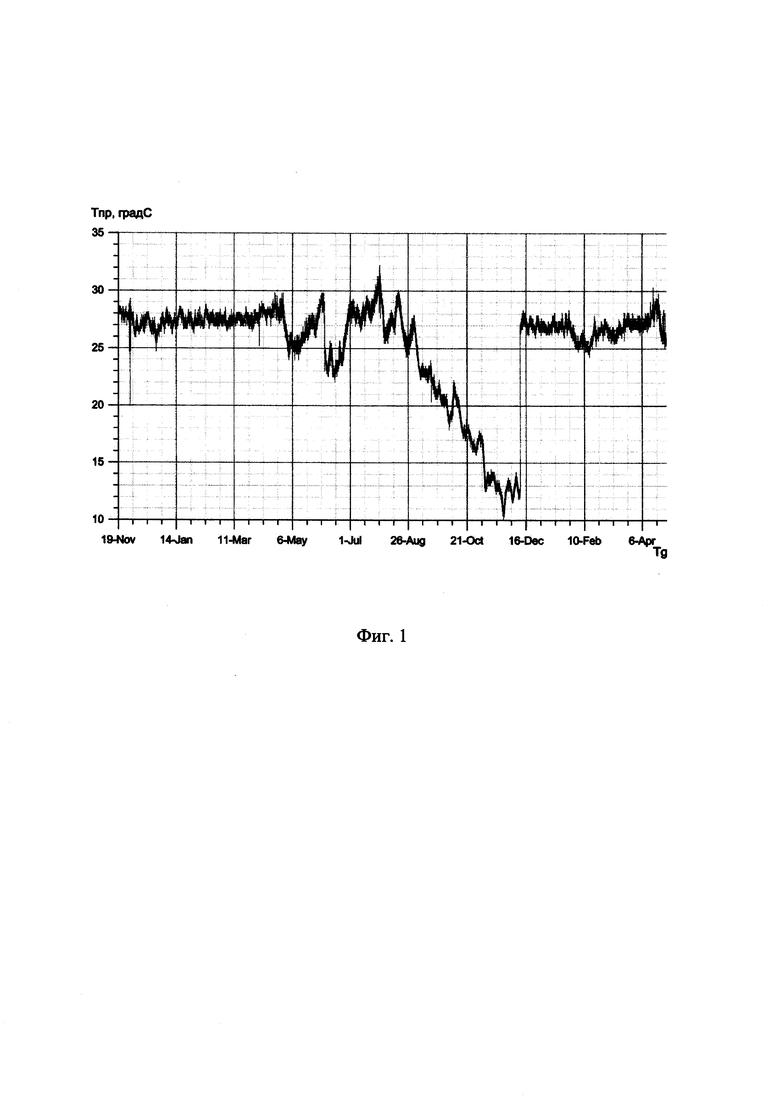
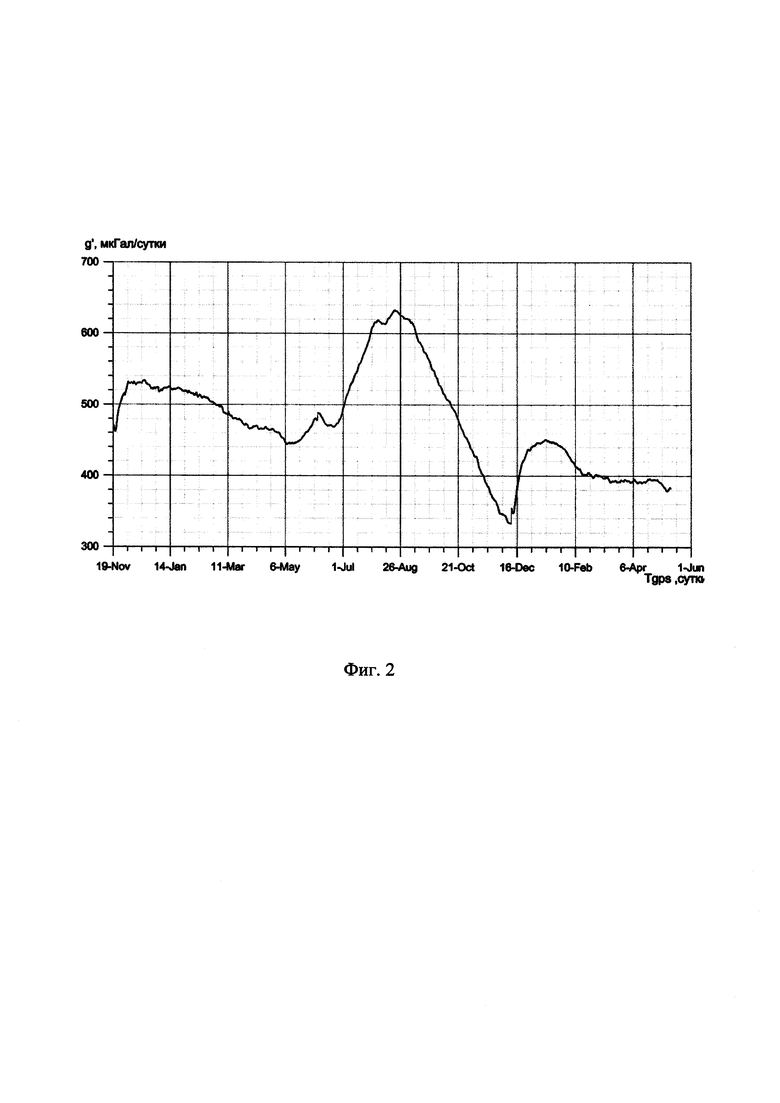
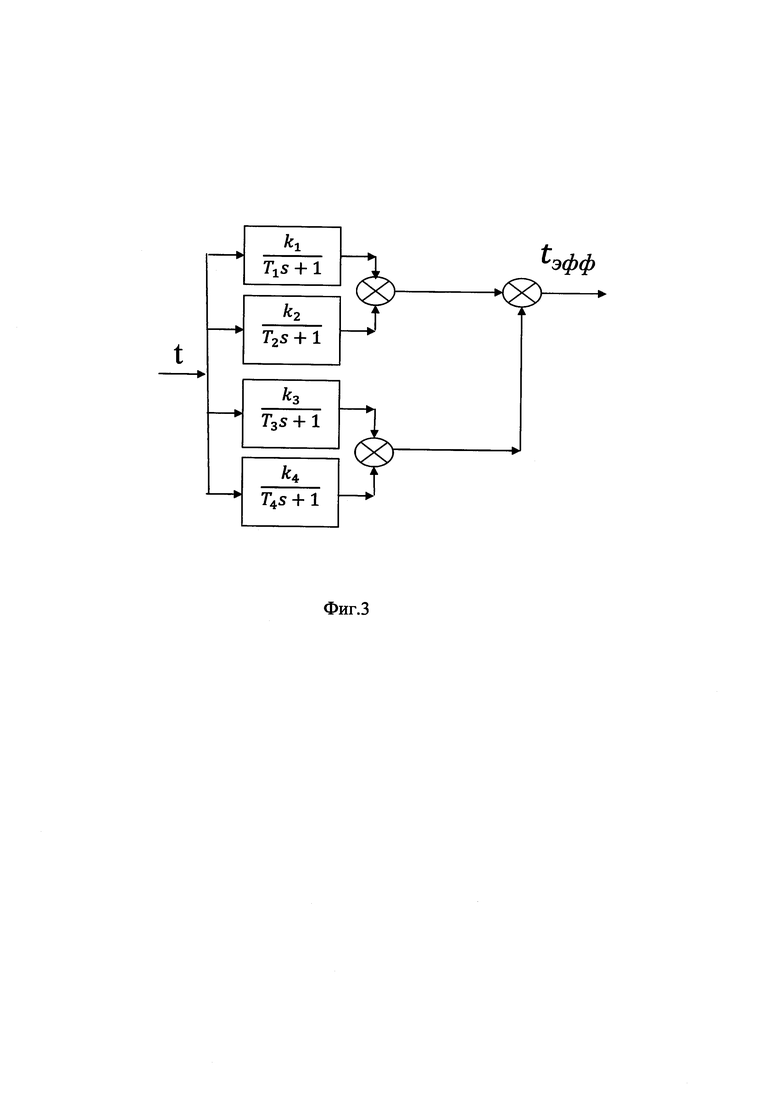
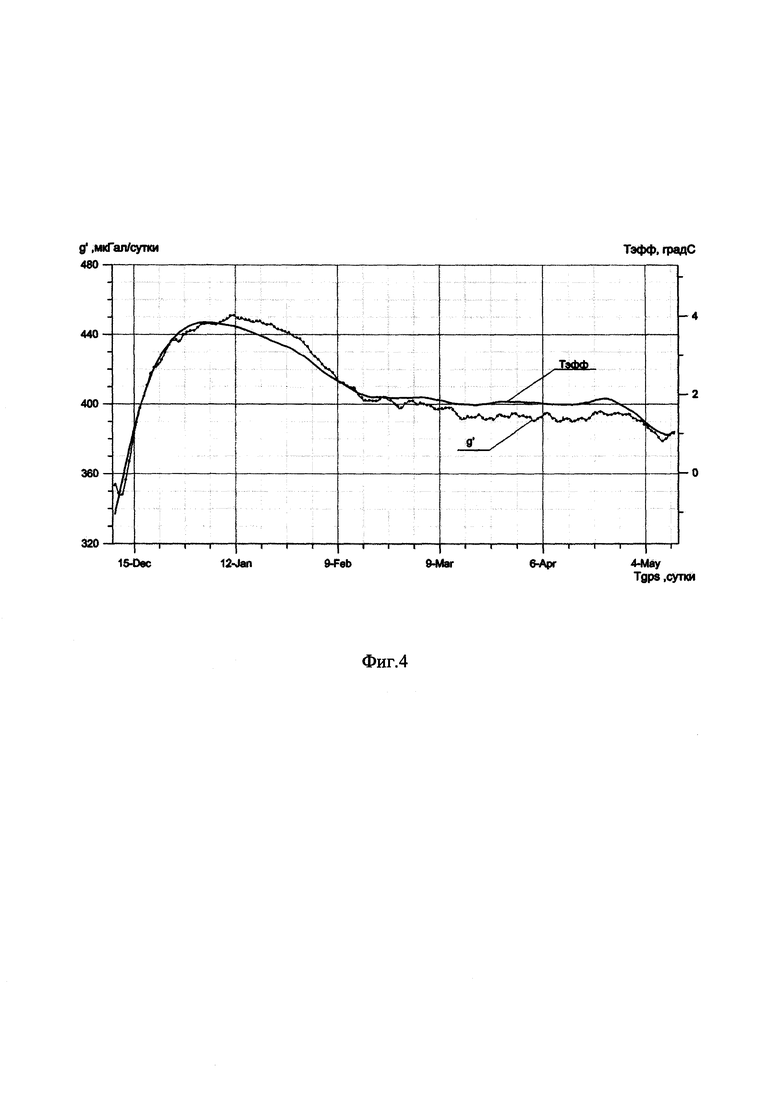
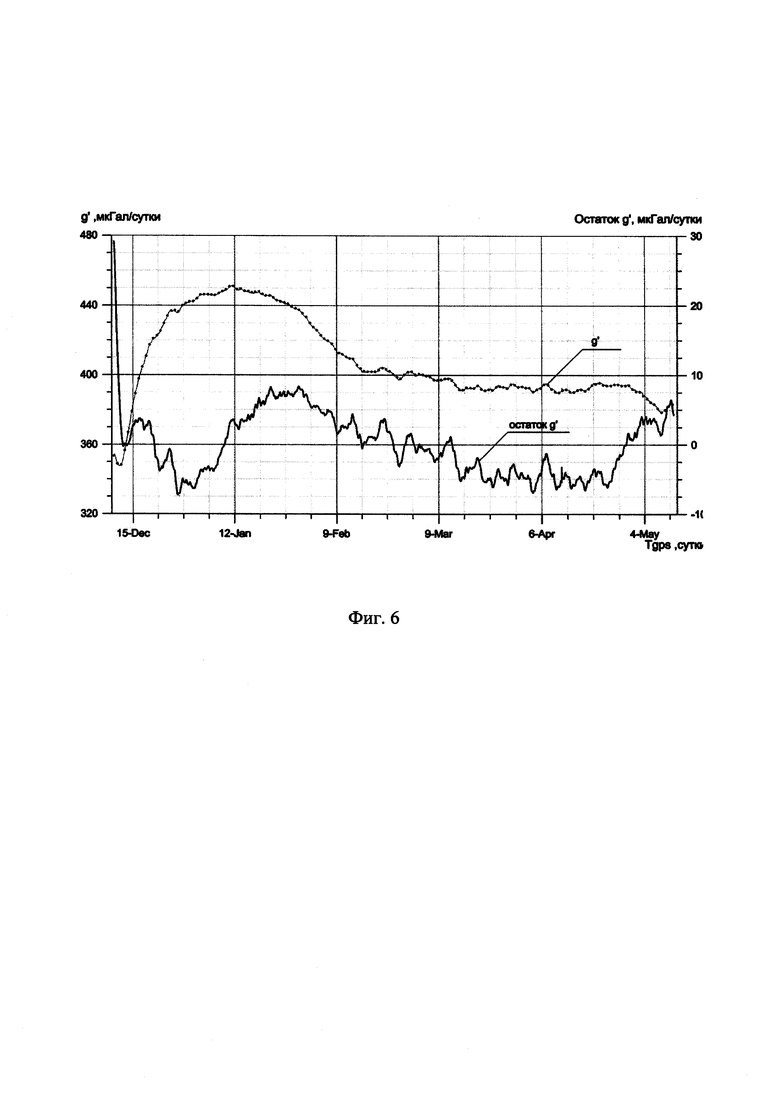
Способ компенсации нелинейной составляющей скорости дрейфа нуль-пункта статического термостатированного гравиметра при гравиметрических измерениях поясняется чертежами, где на фиг. 1 приведен график изменения температуры, на фиг. 2 - график изменения скорости дрейфа нуль-пункта гравиметра, на фиг. 3 - блок-схема вычисления эффективной температуры, на фиг. 4 - графики эффективной температуры и скорости дрейфа нуль-пункта гравиметра, на фиг. 5 - график зависимости нелинейной составляющей скорости дрейфа нуль-пункта гравиметра от эффективной температуры, на фиг. 6 - график нелинейной составляющей скорости дрейфа нуль-пункта гравиметра до и после введения поправки.
Способ компенсации нелинейной составляющей скорости дрейфа нуль-пункта статического термостатированного гравиметра при гравиметрических измерениях осуществляется следующим образом.
Проводят эталонные гравиметрические измерения с одновременным измерением температуры корпуса гравиметра при различных температурах окружающей среды, Затем проводят высокочастотную фильтрацию результатов измерений от микросейсмических шумов, сейсмических событий, лунно-солнечного приливных явлений и барометрического эффекта. После чего определяют линейную и нелинейную составляющие скорости дрейфа нуль-пункта статического гравиметра. На основании полученных данных создают модель эффективной температуры в виде набора апериодических звеньев первого порядка, параметры которых определяются по максимуму корреляции между скоростью дрейфа нуль-пункта гравиметра и эффективной температурой. Параметрами апериодических звеньев первого порядка являются постоянная времени и коэффициент усиления. Затем строят график зависимости скорости дрейфа нуль-пункта гравиметра от эффективной температуры, определяют угол наклона аппроксимирующей прямой, тангенс которого является коэффициентом пересчета эффективной температуры в поправку, учитывающую нелинейную составляющую скорости дрейфа нуль-пункта гравиметра. После чего проводят текущих гравиметрических измерений с одновременным измерением температуры корпуса гравиметра и определением линейной и нелинейных составляющих скорости дрейфа нуль-пункта гравиметра. Определяют эффективную температуру путем моделирования. Вычисляют поправку, компенсирующую нелинейную составляющую дрейфа нуль-пункта гравиметра, путем умножения полученной эффективной температуры на коэффициент пересчета эффективной температуры в поправку. Затем вносят соответствующее значение вышеуказанной поправки в нелинейную составляющую скорости дрейфа нуль-пункта гравиметра при текущих гравиметрических измерениях.
Конкретный пример осуществления способа компенсации нелинейной составляющей скорости дрейфа нуль-пункта статического термостатированного гравиметра при гравиметрических измерениях.
Статический термостатированный гравиметр CG-5 Autograv установили на опорном гравиметрическом пункте и стали проводить эталонные гравиметрические измерения с одновременным измерением температуры корпуса гравиметра при различных температурах окружающей среды. График изменения температуры представлен на фиг. 1. После завершения режима эталонных измерений выполняли высокочастотную фильтрацию, накопленных во время наблюдений, результатов измерений с целью подавления микросейсмических шумов, снижения влияния сейсмических событий, лунно-солнечных приливных явлений и барометрического эффекта. Затем определяли линейную и нелинейную составляющие скорости дрейфа нуль-пункта статического гравиметра. Для определения скорости дрейфа применяли числовое дифференцирование результата фильтрации по четырех точечной симметричной формуле:
g[i]'=((g[i-2]-g[i+2])-8×(g[i-1]-g[i+1]))/12×h,
где: g[i]' - скорость дрейфа (мкГал/сутки);
g[i] - результат фильтрации отсчетов (мкГал);
i - порядковый номер отсчета;
h - длительность интервала между отсчетами (сутки).
График изменения скорости дрейфа нуль-пункта гравиметра представлен на фиг. 2. Линейная составляющая скорости дрейфа нуль-пункта гравиметра определяется как среднее значение скорости дрейфа за время наблюдения. После чего создали модель эффективной температуры в виде набора апериодических звеньев первого порядка, параметры которых определяются по максимуму корреляции между скоростью дрейфа нуль-пункта гравиметра и эффективной температурой. На фиг. 3 представлена блок-схема вычисления эффективной температуры. Параметры для вычисления эффективной температуры, учитывающей конструктивные особенности прибора, были получены эмпирическим путем: T1=4 суток, Т2=5 суток, Т3=15 суток, T4=30 суток, а коэффициенты подбирались исходя из максимизации корреляции между «эффективной температурой и скоростью дрейфа: k1=0.22. k2=0.22. k3=1.05. k4=1. На фиг. 4 представлены графики эффективной температуры и скорости дрейфа нуль-пункта гравиметра. Коэффициент корреляции этих двух зависимостей составляет 0,981. Затем построили график зависимости нелинейной составляющей скорости дрейфа нуль-пункта гравиметра от эффективной температуры (фиг. 5). Определили угол наклона аппроксимирующей прямой, тангенс которого является коэффициентом пересчета эффективной температуры в поправку, учитывающую нелинейную составляющую скорости дрейфа нуль-пункта гравиметра. Затем проводили текущие гравиметрические измерения с одновременным измерением температуры корпуса гравиметра и определением линейной и нелинейной составляющих скорости дрейфа нуль-пункта гравиметра, с последующим определением эффективной температуры путем моделирования. Вычисление поправки, компенсирующей нелинейную составляющую дрейфа нуль-пункта гравиметра, проводили путем умножения полученной эффективной температуры на коэффициент пересчета эффективной температуры в поправку. После чего вносили соответствующее значение вышеуказанной поправки в нелинейную составляющую скорости дрейфа нуль-пункта гравиметра при текущих гравиметрических измерениях. Результат компенсации нелинейной составляющей дрейфа при выполнении текущих измерений представлен на фиг. 6. В результате внесения поправки в нелинейную составляющую скорости дрейфа нуль-пункта гравиметра погрешность уменьшилась на порядок
Предложенный способ компенсации нелинейной составляющей скорости дрейфа нуль-пункта статического термостатированного гравиметра при гравиметрических измерениях повышает точность и достоверность гравиметрических измерений за счет уменьшения температурных погрешностей гравиметрических измерений статическим термостатированным гравиметром, сокращает расходы, позволяет увеличить продолжительность рейсов и сократить количество опорных пунктов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2304794C2 |
| СПОСОБ ГРАВИТАЦИОННОГО КАРОТАЖА БУРОВЫХ СКВАЖИН | 1988 |
|
SU1574061A3 |
| ГРАВИМЕТР | 1987 |
|
SU1431524A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗМОЖНОСТИ НАСТУПЛЕНИЯ КАТАСТРОФИЧЕСКИХ ЯВЛЕНИЙ | 2011 |
|
RU2489736C1 |
| СТАТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ В МОРЕ | 2009 |
|
RU2441260C2 |
| Способ ледового комбинированного мониторинга в акватории месторождения углеводородов и комплекс для его осуществления | 2024 |
|
RU2841556C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРНЫХ ПОПРАВОК ПРИ ГРАВИМЕТРИЧЕСКИХ ИЗМЕРЕНИЯХ | 2002 |
|
RU2207600C1 |
| Способ измерения гравитационного поля Земли | 2020 |
|
RU2737034C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗМОЖНОСТИ НАСТУПЛЕНИЯ КАТАСТРОФИЧЕСКИХ ЯВЛЕНИЙ | 2011 |
|
RU2451310C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БАРОМЕТРИЧЕСКОЙ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2265855C1 |
Изобретение относится к области гравиметрии и может быть использовано для компенсации нелинейной составляющей скорости дрейфа нуль-пункта статического термостатированного гравиметра. Сущность: выполняют эталонные гравиметрические измерения с одновременным измерением температуры корпуса гравиметра при различных температурах окружающей среды. Проводят высокочастотную фильтрацию результатов измерений от микросейсмических шумов, сейсмических событий, лунно-солнечных приливных явлений и барометрического эффекта. Определяют линейную и нелинейную составляющие скорости дрейфа нуль-пункта статического гравиметра. Создают модель эффективной температуры в виде набора апериодических звеньев первого порядка, параметры которых определяются по максимуму корреляции между нелинейной составляющей скорости дрейфа нуль-пункта гравиметра и эффективной температурой. Строят график зависимости нелинейной составляющей скорости дрейфа нуль-пункта гравиметра от эффективной температуры. Определяют угол наклона аппроксимирующей прямой, тангенс которого является коэффициентом пересчета эффективной температуры в поправку, учитывающую нелинейную составляющую скорости дрейфа нуль-пункта гравиметра. Проводят текущие гравиметрические измерения с одновременным измерением температуры корпуса гравиметра и определением линейной и нелинейной составляющих скорости дрейфа нуль-пункта гравиметра. Определяют эффективную температуру путем моделирования. Вычисляют поправку, компенсирующую нелинейную составляющую дрейфа нуль-пункта гравиметра, путем умножения полученной эффективной температуры на коэффициент пересчета эффективной температуры в поправку. Вносят соответствующее значение вышеуказанной поправки в нелинейную составляющую скорости дрейфа нуль-пункта гравиметра при текущих гравиметрических измерениях. Технический результат: увеличение точности гравиметрических измерений за счет уменьшения температурных погрешностей гравиметрических измерений статическим термостатированным гравиметром, увеличение продолжительности рейсов и сокращение количества опорных пунктов. 6 ил.
Способ компенсации нелинейной составляющей скорости дрейфа нуль-пункта статического термостатированного гравиметра при гравиметрических измерениях, включающий проведение эталонных гравиметрических измерений с одновременным измерением температуры корпуса гравиметра при различных температурах окружающей среды, высокочастотную фильтрацию результатов измерений от микросейсмических шумов, сейсмических событий, лунно-солнечных приливных явлений и барометрического эффекта с последующим определением линейной и нелинейной составляющих скорости дрейфа нуль-пункта статического гравиметра, создание модели эффективной температуры в виде набора апериодических звеньев первого порядка, параметры которых определяются по максимуму корреляции между нелинейной составляющей скорости дрейфа нуль-пункта гравиметра и эффективной температурой, построение графика зависимости нелинейной составляющей скорости дрейфа нуль-пункта гравиметра от эффективной температуры, определение угла наклона аппроксимирующей прямой, тангенс которого является коэффициентом пересчета эффективной температуры в поправку, учитывающую нелинейную составляющую скорости дрейфа нуль-пункта гравиметра, проведение текущих гравиметрических измерений с одновременным измерением температуры корпуса гравиметра и определением линейной и нелинейной составляющих скорости дрейфа нуль-пункта гравиметра, с последующим определением эффективной температуры путем моделирования, вычисление поправки, компенсирующей нелинейную составляющую дрейфа нуль-пункта гравиметра, путем умножения полученной эффективной температуры на коэффициент пересчета эффективной температуры в поправку и внесение соответствующего значения вышеуказанной поправки в нелинейную составляющую скорости дрейфа нуль-пункта гравиметра при текущих гравиметрических измерениях.
| SU 1436680 A3, 19.06.1995 | |||
| Способ измерения гравитационного поля Земли | 2020 |
|
RU2737034C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРНЫХ ПОПРАВОК ПРИ ГРАВИМЕТРИЧЕСКИХ ИЗМЕРЕНИЯХ | 2002 |
|
RU2207600C1 |

