Изобретение относится к области электротехники и может быть использовано в нефтегазодобывающей промышленности.
Известен способ управления вентильным электродвигателем, реализованный в управляемом вентильном электродвигателе, включающий пуск электродвигателя в синхронном режиме и вращение ротора в вентильном режиме по сигналам ЭДС в свободных от тока секциях обмотки якоря (авторское свидетельство СССР 1774455, кл. Н 02 Р 6/02, 1992).
Недостатком известного способа является невысокая точность определения момента коммутации силовых ключей, приводящая к снижению эксплуатационных качеств и ресурса работы электродвигателя.
Наиболее близким к предлагаемому является способ управления вентильным электродвигателем, секции якорной обмотки которого соединены в "звезду" и подключены к выходам двухполупериодного преобразователя частоты в виде трехфазного моста с обратными диодами, включающий пуск и вращение ротора по сигналам ЭДС в свободных от тока секциях обмотки якоря, преобразование сигналов ЭДС нормализатором в дискретные сигналы логического уровня, поступление дискретных сигналов на входы микроконтроллера, определение микроконтроллером по математической модели данного типа электродвигателя моментов коммутации секций обмотки якоря относительно моментов перехода через ноль ЭДС свободных секций (Radim Visinka, Leos Chalupa, Ivan Skalka. "Системы управления электродвигателями на микроконтроллерах фирмы MOTOROLA". CHIP NEWS Цифровое управление электроприводом, 1999, 1, стр.15).
Недостатком известного способа является отсутствие коррекции момента коммутации в зависимости от величины тока нагрузки, скорости вращения двигателя и индуктивности двигателя с подводящим кабелем в процессе работы двигателя и, как следствие, невозможность управления вентильным индукторным двигателем.
Изобретение направлено на решение задачи, заключающейся в создании универсального способа управления вентильным электродвигателем.
Поставленная задача решается тем, что в способе управления вентильным электродвигателем, секции якорной обмотки которого соединены в "звезду" и подключены к выходам двухполупериодного преобразователя частоты в виде трехфазного моста с обратными диодами, включающем пуск и вращение ротора по сигналам ЭДС в свободных от тока секциях обмотки якоря, преобразование сигналов ЭДС нормализатором в дискретные сигналы логического уровня, поступление дискретных сигналов на входы микроконтроллера, определение микроконтроллером по математической модели данного типа электродвигателя моментов коммутации секций обмотки якоря относительно моментов перехода через ноль ЭДС свободных секций, моменты коммутации смещаются относительно моментов перехода через ноль ЭДС свободных секций в зависимости от величин тока нагрузки, скорости вращения ротора и индуктивности секций якорной обмотки, при этом в качестве интегральной оценки текущих значений тока нагрузки, скорости вращения ротора и индуктивности секций якорной обмотки используется время протекания тока через обратный диод трехфазного моста.
При осуществлении изобретения реализуется повышение КПД двигателя за счет более точного определения момента коммутации.
Изобретение поясняется чертежом, где на фиг.1 представлена функциональная схема вентильного электродвигателя; на фиг.2 функциональная схема нормализатора; на фиг.3 - диаграмма напряжений секций обмотки якоря на входе и выходе нормализатора; на фиг.4 - диаграммы ЭДС секций якорной обмотки на холостом ходу и под нагрузкой.
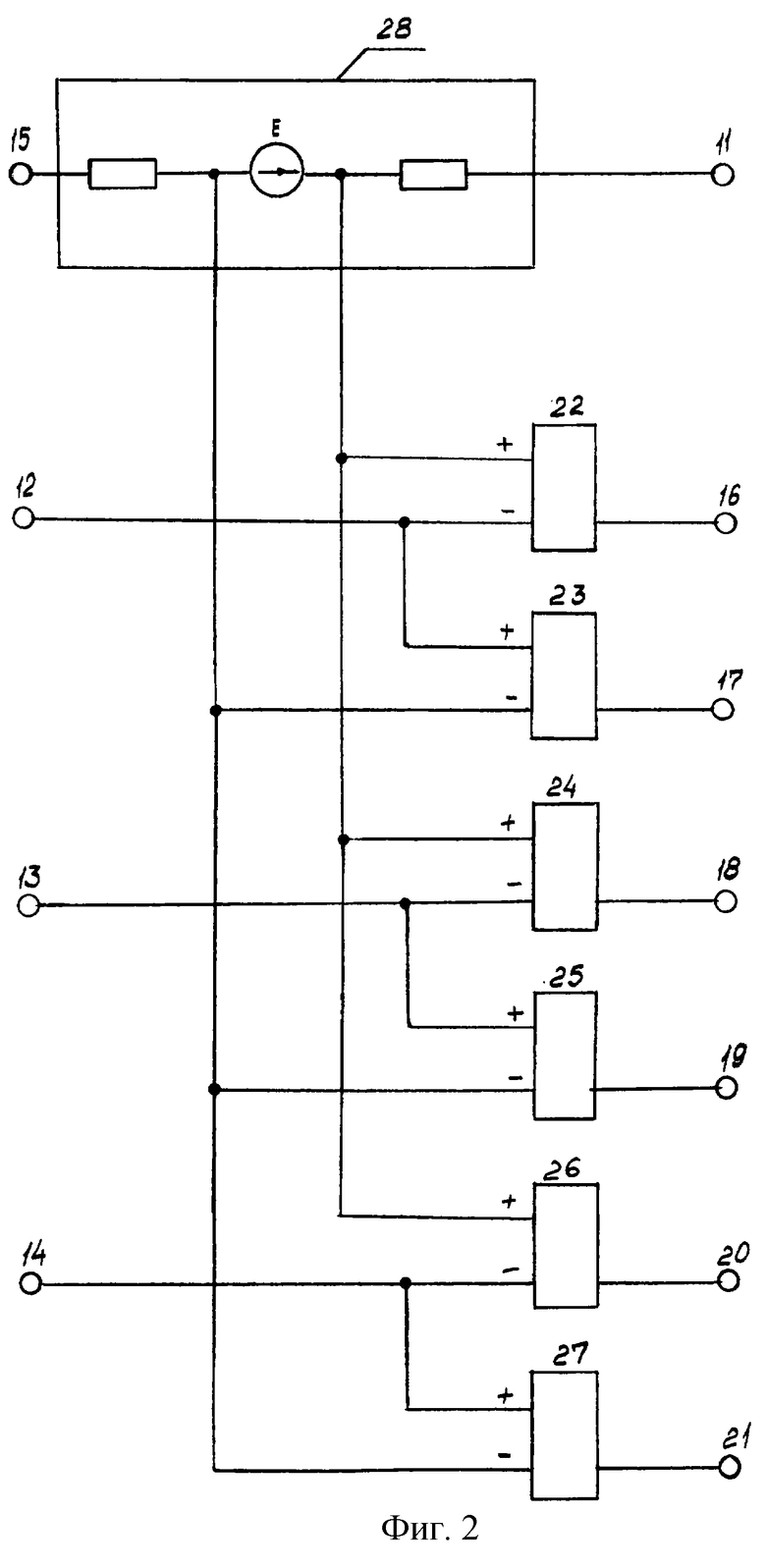
Способ управления реализован в вентильном электродвигателе, содержащем электромеханический преобразователь энергии 1 с выполняющим функцию индуктора ротором 2 на постоянных магнитах или ротором 3 из магнитомягкого материала с обмоткой возбуждения 4. Секции якорной обмотки 5, 6, 7 электромеханического преобразователя 1 соединены в "звезду" и подключены к выходам двухполупериодного преобразователя частоты 8, выполненного в виде трехфазного моста с обратными диодами, и к входам нормализатора 9. Сигналы с нормализатора поступают на микроконтроллер 10, формирующий управляющие комбинации для преобразователя частоты. Нормализатор 9 имеет входы 11, 12, 13, 14, 15, выходы 16, 17, 18, 19, 20, 21, компараторы 22, 23, 24, 25, 26, 27 и делитель 28, включающий в себя источник напряжения Е, определяющий пороги срабатывания компараторов.
Способ управления вентильным электродвигателем реализован следующим образом.
После пуска электродвигателя по сигналам ЭДС в свободных от тока секциях обмотки якоря микроконтроллер 10 циклично выдает управляющие комбинации, обеспечивающие 120o коммутацию ключей, на двухполупериодный преобразователь частоты 8. Ротор 2 или 3 вращается.
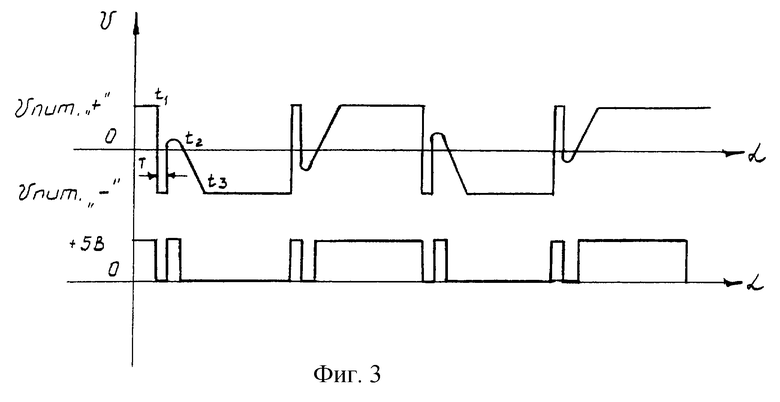
Пусть при выдаче I-ой управляющей комбинации преобразователь частоты 8 отключает секцию 6 от "+" источника в момент времени t1 фиг.3. Нормализатор 9 преобразует напряжение секции 6 на входе 13 в напряжения логического уровня на выходах 18,19. В этих сигналах, поступающих на входы микроконтроллера 10, содержится следующая информация:
- о времени Т (фиг.3) - время протекания тока в прежнем направлении под действием ЭДС самоиндукции через обратный диод преобразователя частоты 8;
- о моменте времени t2 (фиг.3) - момент перехода через ноль ЭДС секции, отключенной от источника.
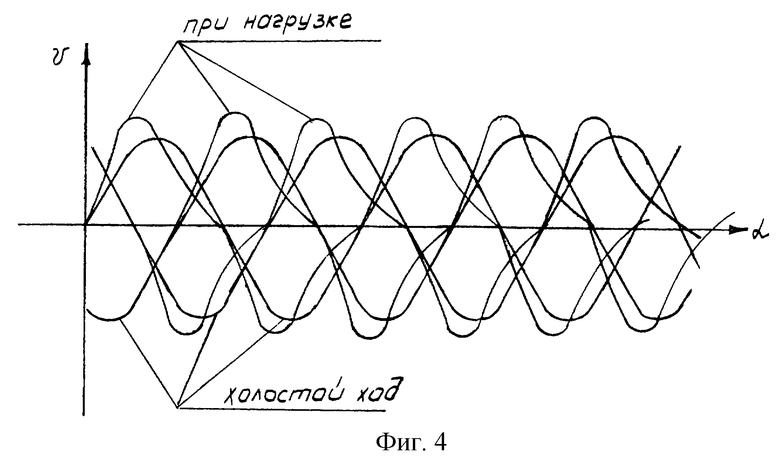
На фиг. 4 представлены диаграммы ЭДС секций 5, 6, 7, якорной обмотки на холостом ходу и при нагрузке под действием реакции якоря. Из диаграмм следует, что в зависимости от величин тока нагрузки, скорости и индуктивности необходимо смещение момента коммутации секций 5, 6, 7 якорной обмотки относительно перехода через ноль ЭДС свободных секций, определяемое математической моделью данного типа электродвигателя, что не учитывается в известных способах управления. Это приводит к протеканию тока в секциях обмотки якоря, когда он не создает номинальный момент или создает тормозной.
Микроконтроллер 10 вычисляет момент подключения секции 6 к "-" источника питания (момент выдачи I+1-ой комбинации), используя время между моментами t2, перехода ЭДС секций, отключенных от источника через "0". Для учета реакции якоря при определении моментов коммутации используется время Т. Для этого вычисленный момент смещается на величину, пропорциональную времени Т.
Применение описанного способа позволяет исключить протекание тока в секциях якорной обмотки, когда он не создает номинального момента или создает тормозной момент. Т.е. микроконтроллер автоматически настраивает смещение момента коммутации на текущие значения индуктивности двигателя с подводящим кабелем, тока нагрузки и скорости вращения двигателя. Это приводит к повышению КПД, улучшению эксплуатационных характеристик вентильных двигателей и делает возможным управление вентильными индукторными двигателями без установки датчика положения ротора с хорошими эксплуатационными характеристиками.
Этот метод особенно эффективен в системах, где длина подводящего кабеля значительна и меняется в широких пределах, например в нефтедобыче, бурении.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2279757C2 |
| ПОГРУЖНОЙ ЭЛЕКТРОДВИГАТЕЛЬ С ПОСТОЯННЫМИ МАГНИТАМИ | 2002 |
|
RU2247463C2 |
| УПРАВЛЯЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2088039C1 |
| УПРАВЛЯЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2091978C1 |
| СИСТЕМА ПОДГОТОВКИ НЕШТАТНОГО ТОПЛИВА | 2002 |
|
RU2215176C2 |
| СПОСОБ РАЗРАБОТКИ НЕФТЯНЫХ МЕСТОРОЖДЕНИЙ | 2001 |
|
RU2191257C1 |
| ПЛАСТИНЧАТЫЙ НЕФТЯНОЙ НАСОС | 2001 |
|
RU2191926C2 |
| Инвертная кислотная микроэмульсия для обработки нефтегазового пласта | 2001 |
|
RU2220279C2 |
| СПОСОБ ПОЛУЧЕНИЯ ДЕПРЕССОРНОЙ ПРИСАДКИ | 2001 |
|
RU2180339C1 |
| СПОСОБ РАЗРАБОТКИ МНОГОПЛАСТОВОГО НЕФТЯНОГО МЕСТОРОЖДЕНИЯ | 2001 |
|
RU2188938C1 |
Изобретение относится к электротехнике и может быть использовано в нефтегазодобывающей промышленности. Техническим результатом является создание универсального способа управления вентильным электродвигателем. В способе управления вентильным электродвигателем пуск и вращение ротора электродвигателя осуществляют по сигналам ЭДС в свободных от тока секциях якорной обмотки электромеханического преобразователя. Сигналы ЭДС электромеханического преобразователя подают на нормализатор для их преобразования в дискретные сигналы логического уровня, которые поступают на входы микроконтроллера для определения по математической модели вентильного электродвигателя моментов коммутации в секциях якорной обмотки, когда он не создает номинального момента или создает тормозной момент. Микроконтроллер автоматически настраивает угол опережения коммутации на текущие значения индуктивности вентильного электродвигателя с подводящим кабелем, тока нагрузки и скорости вращения вентильного электродвигателя. В результате реализуется функция управляемого датчика положения ротора. Это приводит к повышению КПД и улучшению эксплуатационных характеристик вентильного электродвигателя и позволяет управлять вентильными индукторными электродвигателями без датчика положения ротора с хорошими эксплуатационными характеристиками. Способ особенно эффективен, где длина подводящего кабеля значительна и меняется в широких пределах, например, при нефтедобыче, бурении. 4 ил.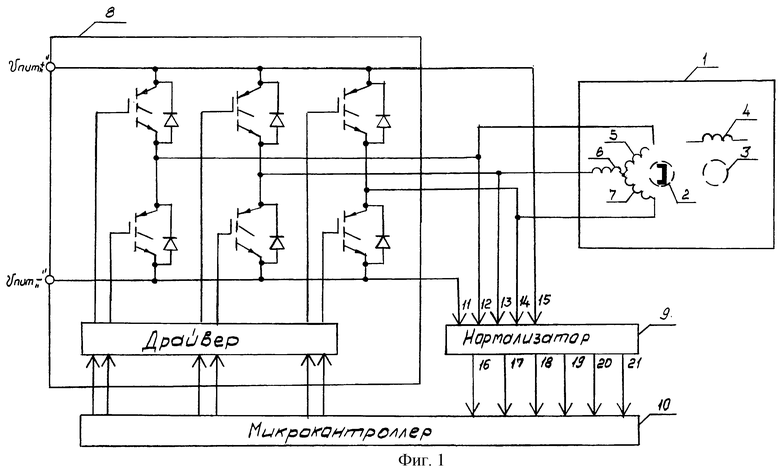
Способ управления вентильным электродвигателем, секции якорной обмотки которого соединены в "звезду" и подключены к выходам двухполупериодного преобразователя частоты в виде трехфазного моста с обратными диодами, включающий пуск и вращение ротора по сигналам ЭДС в свободных от тока секциях обмотки якоря, преобразование сигналов ЭДС нормализатором в дискретные сигналы логического уровня, поступление дискретных сигналов на входы микроконтроллера, определение микроконтроллером по математической модели данного типа электродвигателя моментов коммутации секций обмотки якоря относительно моментов перехода через ноль ЭДС свободных секций, отличающийся тем, что моменты коммутации смещаются относительно моментов перехода через ноль ЭДС свободных секций в зависимости от величин тока нагрузки, скорости вращения ротора и индуктивности секций якорной обмотки, при этом в качестве интегральной оценки текущих значений тока нагрузки, скорости вращения ротора и индуктивности секций якорной обмотки используется время протекания тока через обратный диод трехфазного моста.
| СНIРS NEWS | |||
| Цифровое управление электроприводом, 1999, №1 (34), с.15 | |||
| СТАТИЧЕСКИЙ СИММЕТРИЧНЫЙ ТРИГГЕР | 0 |
|
SU288039A1 |
| Приспособление для автоматического регулирования подачи нефти в топки паровых котлов | 1928 |
|
SU13453A1 |
| ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ | 1996 |
|
RU2098917C1 |
| Вентильный электродвигатель | 1983 |
|
SU1105986A1 |
| Ротор-превентор | 1958 |
|
SU146263A1 |
| DE 3836950 А1, 03.05.1990 | |||
| US 4978895 А, 18.12.1990. | |||

