Изобретение относится к области электротехники, а именно к способам управления вентильным электродвигателем, и может быть использовано, в частности, для управления погружным вентильным электродвигателем, служащим приводом погружного насоса, применяемого в нефтяной промышленности для добычи нефти.
Известен способ управления вентильным электродвигателем, реализованный в управляемом вентильном электродвигателе, включающий пуск электродвигателя в синхронном режиме и вращение ротора в вентильном режиме по сигналам ЭДС в свободных от тока секциях обмотки якоря (авторское свидетельство СССР 1774455, кл. Н 02 Р 6/02, 1992).
Недостатком известного способа является невысокая точность определения момента коммутации силовых ключей, приводящая к снижению эксплуатационных качеств и ресурса работы электродвигателя.
Также известен способ управления вентильным электродвигателем, секции якорной обмотки которого соединены в "звезду" и подключены к выходам двухполупериодного преобразователя частоты в виде трехфазного моста с обратными диодами, включающий пуск и вращение ротора по сигналам ЭДС в свободных от тока секциях обмотки якоря, преобразование сигналов ЭДС нормализатором в дискретные сигналы логического уровня, поступление дискретных сигналов на входы микроконтроллера, определение микроконтроллером по математической модели данного типа электродвигателя моментов коммутации секций обмотки якоря относительно моментов перехода через ноль ЭДС свободных секций (Radim Visinka, Leos Chalupa, Ivan Skalka. "Системы управления электродвигателями на микроконтроллерах фирмы MOTOROLA", журнал "CHIP NEWS: Цифровое управление электроприводом", №1, 1999, стр.14-16).
Недостатком известного способа является отсутствие коррекции момента коммутации в зависимости от величины тока нагрузки, скорости вращения двигателя и индуктивности двигателя с подводящим кабелем в процессе работы двигателя и, как следствие, невозможность управления вентильным электродвигателем с повышенной индуктивностью обмоток.
Наиболее близким к заявляемому техническому решению по совокупности существенных признаков и достигаемому техническому результату является способ управления вентильным электродвигателем, секции якорной обмотки которого соединены в "звезду" и подключены к выходам двухполупериодного преобразователя частоты, выполненного в виде трехфазного моста с обратными диодами, включающий пуск и вращение ротора по сигналам ЭДС в свободных от тока секциях обмотки якоря, преобразование сигналов ЭДС нормализатором в дискретные сигналы логического уровня, поступление дискретных сигналов на входы микроконтроллера, определение микроконтроллером по математической модели данного типа электродвигателя моментов коммутации секций обмотки якоря относительно моментов перехода через ноль ЭДС свободных секций и смещение момента коммутации относительно моментов перехода через ноль ЭДС свободных секций в зависимости от величин тока нагрузки, скорости вращения ротора и индуктивности секций якорной обмотки, причем в качестве интегральной оценки текущих значений тока нагрузки, скорости вращения ротора и индуктивности секций якорной обмотки используют время протекания тока через обратный диод трехфазного моста. Устройство для реализации данного способа содержит двухполупериодный преобразователь частоты, выполненный в виде трехфазного моста с обратными диодами, микроконтроллер и нормализатор, состоящий из делителя и блока компараторов, имеющего два входа опорного уровня (см. патент RU 2207700 C2, публ. 27.06.2003, МПК7 Н 02 Р 6/00, Н 02 Р 6/18, Н 02 К 29/00, Н 02 К 29/06).
Недостатком данного способа является ограничение смещения моментов коммутации моментом перехода ЭДС свободной фазы нуля, что составляет 30 электрических градусов, а с учетом задержки фильтра нормализатора и времени вычислений моментов коммутации, выполняемых процессором после пересечения ЭДС свободной фазы нуля и занимающих в зависимости от частоты вращения 10-15 электрических градусов, практически достижимой величиной смещения моментов коммутации является величина 15-20 электрических градусов.
Следствием данного недостатка является снижение КПД вентильного электродвигателя и невозможность управления вентильными электродвигателями с большими коэффициентами искажения электромагнитного поля, требующими смещения коммутации на углы более 20 электрических градусов.
Задача, на решение которой направлено заявляемое изобретение, состоит в создании способа управления различными типами вентильных электродвигателей.
Технический результат, достигаемый при решении поставленной задачи, заключается в повышении КПД вентильного электродвигателя и возможности управления вентильным электродвигателем с большим коэффициентом искажения электромагнитного поля.
Поставленный технический результат достигается за счет того, что в способе управления вентильным электродвигателем, секции которого соединены в звезду и подключены к выходам двухполупериодного преобразователя частоты в виде трехфазного моста с обратными диодами, включающем пуск и вращение ротора по сигналам ЭДС в свободных от тока секциях обмотки якоря, преобразование сигналов ЭДС нормализатором в дискретные сигналы логического уровня, поступление дискретных сигналов на входы микроконтроллера, определение микроконтроллером по математической модели данного типа электродвигателя моментов коммутации секций обмотки якоря и смещение момента коммутации секций в зависимости от величин тока нагрузки, скорости вращения ротора и индуктивности секций якорной обмотки, в качестве интегральной оценки текущих значений которых используют время протекания тока через обратный диод трехфазного моста, моменты коммутации вычисляют и смещают относительно моментов перехода ЭДС свободных секций уровней напряжения, отличных от нуля и соответствующих заданному углу положения ротора для данных типов двигателя.
Устройство для реализации способа содержит двухполупериодный преобразователь частоты, выполненный в виде трехфазного моста с обратными диодами, микроконтроллер и нормализатор, состоящий из делителя и блока компараторов, имеющего два входа опорного уровня, и отличается тем, что между делителем и блоком компараторов установлен блок смещения опорного уровня, содержащий датчик тока, датчик напряжения, два сумматора и инвертор, при этом входы первого сумматора соединены с датчиками тока и напряжения, входы второго сумматора соединены с выходом первого сумматора и со средней точкой делителя, а выход второго сумматора соединен с первым входом опорного уровня напрямую, а со вторым входом опорного уровня через инвертор.
Наличие в устройстве блока смещения опорного уровня позволяет производить вычисление и смещение моментов коммутации относительно моментов перехода ЭДС свободных секций уровней напряжения, отличных от нуля, это делает достижимыми большие углы смещения моментов коммутации, что в свою очередь позволяет повысить КПД электродвигателя и осуществлять управление различными типами вентильных электродвигателей, в том числе электродвигателями с большим коэффициентом искажения электромагнитного поля.
Изобретение поясняется следующими графическими материалами:
Фиг.1 - функциональная схема устройства управления вентильным электродвигателем;
Фиг.2- функциональная схема нормализатора с блоком смещения опорного уровня;
фиг.3 - диаграмма напряжений секции обмотки якоря на входе нормализатора.
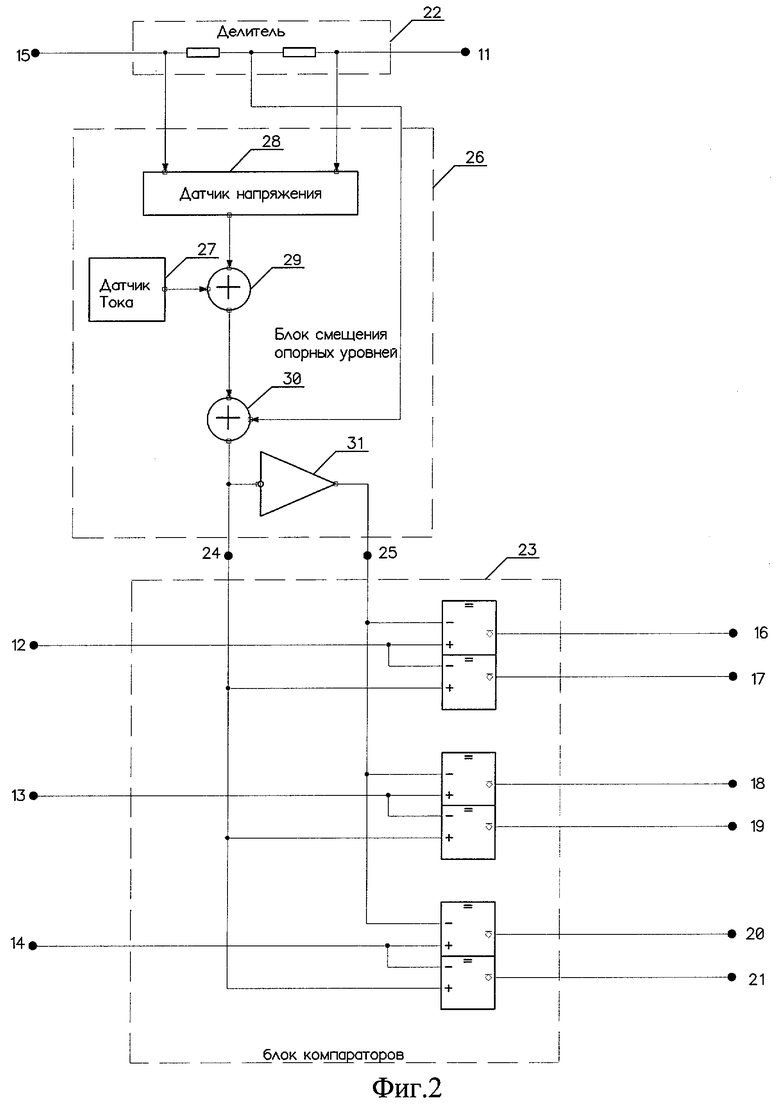
Вентильный электродвигатель 1 имеет ротор 2 на постоянных магнитах, выполняющий функцию индуктора, или ротор 3 из магнитомягкого материала с обмоткой возбуждения 4. Секции якорной обмотки 5, 6, 7 соединены в "звезду" и подключены к выходам двухполупериодного преобразователя частоты 8, выполненного в виде трехфазного моста с обратными диодами, и к входам 12, 13, 14 нормализатора 9. Входы 11 и 15 нормализатора 9 соединены с источником напряжения. Сигналы с выходов 16, 17, 18, 19, 20, 21 нормализатора 9 поступают на микроконтроллер 10, который формирует управляющие комбинации для преобразователя частоты 8. Нормализатор 9 включает в себя делитель 22 и блок компараторов 23, имеющий два входа опорного уровня 24 и 25. Между делителем 22 и блоком компараторов 23 установлен блок смещения опорного уровня 26, определяющий пороги срабатывания компараторов.
Блок смещения опорного уровня 26 содержит датчик тока 27, датчик напряжения 28, два сумматора 29 и 30 и инвертор 31. Входы сумматора 29 соединены с датчиком тока 27 и датчиком напряжения 28, а входы сумматора 30 соединены с выходом сумматора 29 и со средней точкой делителя 22. Выход сумматора 30 соединен с входом опорного уровня 24 напрямую, а с входом опорного уровня 25 через инвертор 31.
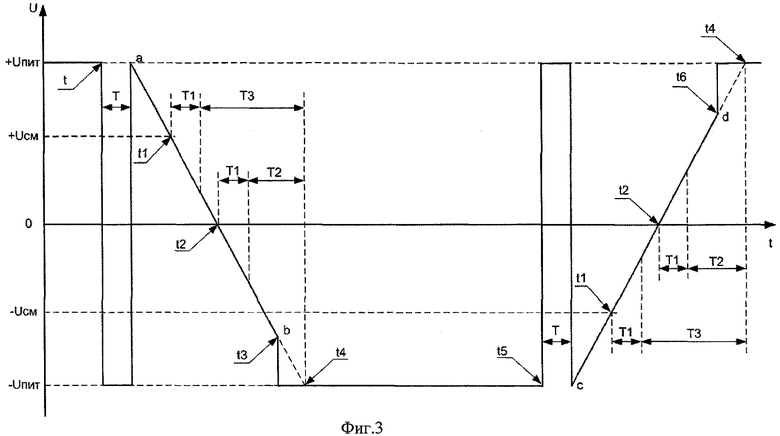
На диаграмме напряжений на входе нормализатора 9 показаны:
- t - момент отключения секции от "+" источника питания;
- Т - интервал времени, в течение которого ток протекает в прежнем направлении под действием ЭДС самоиндукции через обратный диод преобразователя частоты 8;
- Отрезки ab и cd - интервал, на котором напряжение на входе нормализатора 9 совпадает с противоЭДС секции;
- Uсм - напряжение смещения опорного уровня, формируется блоком смещения опорных уровней в зависимости от напряжения Uпит и тока нагрузки;
- t1 - момент пересечения противоЭДС секции уровня опорного напряжения, соответствует углу α0-n0;
- t2 - момент пересечения противоЭДС секции 6 нулевого уровня, соответствует углу α0;
- t3 - момент подключения секции 6 к "-" источника питания.
- T1 - сумма времени вычислений микроконтроллером моментов коммутации и задержки фильтра нормализатора;
- t4 - момент коммутации при отсутствии смещения, учитывающего реакцию якоря, соответствует углу α0+300;
- t5 - момент отключения секции от "-" источника питания;
- t6 - момент подключения секции к "+" источника питания;
- T2 - максимально возможное смещение моментов коммутации при вычислении их относительно момента пересечения противоЭДС секции нулевого уровня;
T3 - максимально возможное смещение моментов коммутации при вычислении их относительно момента пересечения противоЭДС секции опорного уровня Uсм.
Заявляемый способ управления вентильным электродвигателем реализуется при работе устройства следующим образом. После пуска электродвигателя по сигналам ЭДС в свободных от тока секциях обмотки якоря микроконтроллер 10 циклично выдает управляющие комбинации, обеспечивающие 120° коммутацию ключей, на двухполупериодный преобразователь частоты 8. Ротор 2 или 3 начинает вращаться.
Пусть при выдаче I-ой управляющей комбинации преобразователь частоты 8 отключает, например, секцию 6 от "+" источника в момент времени t, фиг.3. Нормализатор 9, имеющий в своем составе блок смещения опорных уровней, преобразует напряжение секции 6 на входе 13 в дискретные сигналы логического уровня на выходах 18, 19. В этих сигналах, поступающих на входы микроконтроллера 10, содержится следующая информация:
- о времени Т (фиг.3) - время протекания тока в прежнем направлении под действием ЭДС самоиндукции через обратный диод преобразователя частоты 8;
- о моменте времени t1 (фиг.3) - момент перехода ЭДС секции, отключенной от источника уровня напряжения, соответствующего углу α0-n0 в зависимости от уровня Uсм.
Микроконтроллер 10 вычисляет момент подключения секции 6 к "-" источника питания (момент выдачи I+1-ой комбинации), используя время между моментами t1 перехода ЭДС секции, отключенных от источника уровня напряжения, соответствующего углу α0-n0. Для учета реакции якоря при определении моментов коммутации используется время Т. Для этого вычисленный момент смещается на величину, пропорциональную времени Т.
Как видно из фиг.3, при вычислении моментов коммутации относительно пересечений ЭДС свободной фазы нуля - момент t2 (угол α0), доступной областью переключений является интервал T2. Это связано с тем, что 10-15 электрических градусов (время Т1) занимают задержка фильтра нормализатора и время вычислений моментов коммутации, выполняющиеся процессором после момента t2.
В заявляемом способе доступной областью переключений является интервал Т3, так как задержка фильтра и время вычислений отсчитываются от момента t1 (угол α0-n), это делает достижимыми большие углы смещения моментов коммутации, что в свою очередь позволяет управлять вентильными электродвигателями с большими коэффициентами искажения электромагнитного поля.
Применение данного способа управления вентильным двигателем особенно эффективно в системах, где длина кабеля, подходящего к двигателю, значительна и меняется в достаточно широких пределах, например, при добычи нефти погружным насосом, приводом для которого служит погружной электродвигатель, управление которого осуществляется наземной станцией управления, которая располагается на значительном расстоянии от скважины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2000 |
|
RU2207700C2 |
| УПРАВЛЯЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2088039C1 |
| ОДНОФАЗНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2010 |
|
RU2453968C2 |
| УПРАВЛЯЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2091978C1 |
| УПРАВЛЯЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2088041C1 |
| Способ импульсного управления вентильным электродвигателем | 1986 |
|
SU1464263A1 |
| Вентильный электродвигатель | 1990 |
|
SU1774455A1 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1302413A2 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Способ импульсного управления вентильным электродвигателем | 1986 |
|
SU1464262A1 |
Изобретение относится к области электротехники и может быть использовано для привода погружных насосов, применяемых в нефтяной промышленности. Техническим результатом является повышение КПД электродвигателя. В способе управления вентильным электродвигателем и устройстве для его осуществления обеспечивают пуск и вращение ротора по сигналам ЭДС в свободных от тока секциях обмотки якоря, преобразование сигналов ЭДС нормализатором в дискретные сигналы логического уровня, определение микроконтроллером моментов коммутации и их смещение в зависимости от величины тока нагрузки, скорости вращения ротора и индуктивности секций якорной обмотки. Моменты коммутации вычисляют и смещают относительно моментов перехода ЭДС свободных секций уровней напряжения, отличных от нуля. Устройство снабжено блоком смещения опорного уровня, состоящим из датчика тока, датчика напряжения, двух сумматоров и инвертора. Блок смещения установлен в нормализаторе между делителем и блоком компараторов. 2 н.п. ф-лы. 3 ил.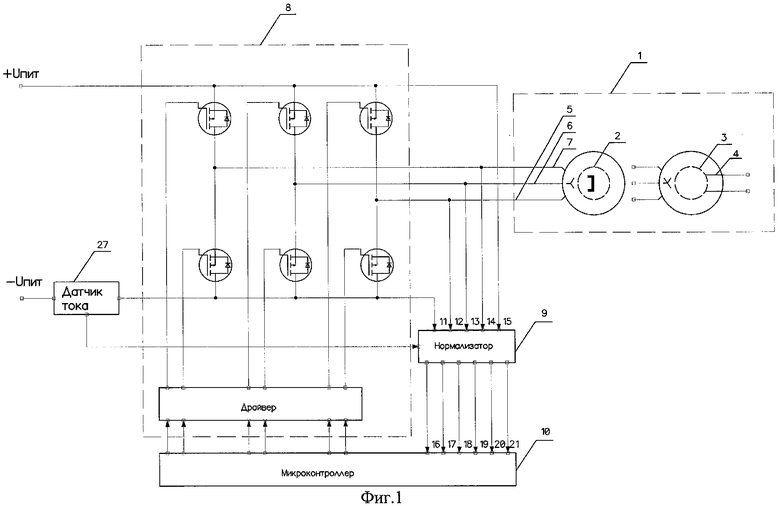
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2000 |
|
RU2207700C2 |
| ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ | 1996 |
|
RU2098917C1 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ДЛЯ ПОГРУЖНЫХ НАСОСНЫХ АГРЕГАТОВ | 1997 |
|
RU2150780C1 |
| Вентильный электродвигатель | 1983 |
|
SU1105986A1 |
| Вентильный электродвигатель | 1990 |
|
SU1774455A1 |
| ВЫХЛОПНОЙ ПАТРУБОК ПАРОВОЙ ТУРБИНЫ | 1997 |
|
RU2117773C1 |
| US 6404153 В2, 11.01.2002 | |||
| КОРПУС ТЕПЛОВОЙ БАТАРЕИ | 2024 |
|
RU2835980C1 |
| DE 10026707 A1, 08.02.2001 | |||
| Лопатка смесителя для жидких и /или сыпучих материалов | 1986 |
|
SU1473823A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

