Изобретение относится к технологии бурения, конкретно к системам автоматического управления бурением.
Известны система и способ управления процессом бурения по патенту РФ 2067170, содержащая датчики контроля основных параметров: осевого усилия, глубины скважины, датчик вибрации буровой колонны и электронную аппаратуру ЭВМ для сравнения замеренных основных параметров с заданными согласно программе управления. Основное назначение этой системы -обеспечение автоматического перехода от режима "Забуривание" к режиму "Бурение". Переход с одного режима на другой осуществляется по показаниям датчика вибраций. Вибрации колонны бурильных труб при касании долотом поверхности породного блока резко возрастают. Система не обеспечивает полной автоматизации процесса бурения.
Известна также система и способ управления процессом бурения по а.с. СССР 1231946 (прототип), содержащая датчики контроля параметров, блок передачи данных, блок обработки данных с программным обеспечением и базой данных управления. База данных управления содержит:
- проектные значения нагрузки на долото;
- частоту вращения ротора;
- расход бурового раствора;
- проектное время бурения;
- глубина скважины.
Недостатки системы заключаются в том, что она не обеспечивает требуемый уровень достоверности информации для определения ситуации для принятия оптимального решения автоматизацией процесса бурения в основном из-за недостаточной емкости базы данных и отсутствии системы учета опыта предшествующих работ и самообучаемости системы.
Задачей создания изобретения является обеспечение высокой степени достоверности определения контролируемой ситуации для полной автоматизации и оптимизации режимов процесса бурения.
Решение указанных задач достигнуто за счет того, что система управления процессом бурения, содержащая забойный двигатель, насос для прокачки промывочной жидкости, забойную телеметрическую систему, наземные датчики контроля технологических параметров, блок передачи информации и управляющий компьютер с программным обеспечением и базой данных управления, которая содержит сведения о проектной траектории скважины, дополнительно содержит базу данных САПР, которая содержит проектные данные по конструкции скважины, характеристики оборудования, технологии процесса бурения, геологические и геофизические данные, при этом программное обеспечение выполнено с возможностью самообучения путем учета данных САПР скважины и учета предшествующего, полученного ранее при бурении скважин того же куста или месторождения, опыта при принятии решения и реализовано с использованием искусственных нейронных сетей. Искусственные нейронные сети содержат однотипные элементы ячейки, имитирующие работу нейронов мозга, обладающие группой синапсов, образующих входные связи, и аксоном, образующих выходную связь данного элемента ячейки.
Решение указанных задач в способе управления процессом бурения, включающем операции измерения забойных и наземных технологических параметров и принятие решения управляющим компьютером, достигнуто тем, что это решение принимается с учетом базы данных САПР и предшествующего опыта бурения скважин того же куста или месторождения и на основании опыта бурения скважины производится корректирование проекта САПР.
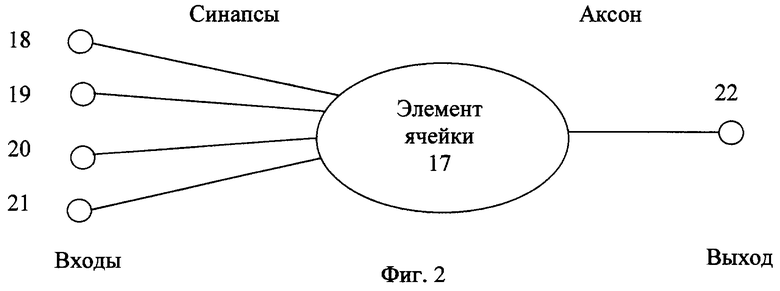
На фиг. 1 приведена общая схема системы. На фиг. 2 - ячейка нейронной сети.
Система управления процессом бурения содержит смонтированные в нижней части колонны бурильных труб 1 забойный двигатель 2 с породоразрушающим инструментом 3 и забойную телеметрическую систему 4 с электромагнитным или гидравлическим каналом связи. Забойная телеметрическая система содержит датчики контроля параметров в забое 5, 6, 7 и 8. Эти датчики контролируют, например, углы азимута, горизонта, положение отклонителя и показатели каротажа. Наземные датчики контроля технологических параметров 9 и 10 могут контролировать любые параметры, например давление промывочной жидкости в магистрали насоса 11, вибрации колонны бурильных труб 1. Датчики 9 и 10 через приемное устройство 12 соединены с управляющим компьютером 13.
Управляющий компьютер 13 содержит программное обеспечение 14, базу данных управления 15 и базу данных САПР 16.
База данных управления 15 содержит сведения о проектной траектории скважины. База данных САПР (Системы автоматизированного проектирования бурового комплекса) содержит проектные данные всего комплекса: конструкцию скважины, характеристики оборудования, технологию процесса бурения, геологию, геофизические данные и т.д. Выходы из компьютера подключены к соответствующим приводам исполнительных устройств (приводу насоса 11, лебедки, превентора и т.д. (на фиг. 1 и 2 не показано).
Программное обеспечение 14 реализовано с использованием искусственных нейронных сетей. Искусственные нейронные сети (фиг. 2) содержат однотипные элементы ячейки, имитирующие работу нейронов мозга, обладающих группой синапсов, образующих входные связи 18...21 и выходную связь - аксон 22. Каждый элемент ячейки характеризуется своим текущим состоянием по аналогии с нервными клетками головного мозга, которые могут быть возбуждены или заторможены. Каждый синапс характеризуется величиной синаптической связи или ее весом Wi, который по физическому смыслу эквивалентен электрической проводимости.
Текущее состояние нейрона определяется как взвешенная сумма его входов
S = Х • Wi.
Выход нейрона есть функция его состояния:
Y= f(s).
Очевидно, что процесс функционирования НС (нейронной сети), то есть сущность действий, которые она способна выполнять, зависит от величин синаптических связей, поэтому задавшись определенной структурой НС, отвечающей какой-либо задаче, при разработке сети необходимо найти оптимальные значения всех переменных весовых коэффициентов (некоторые синаптические связи могут быть постоянными).
Этот этап называется "обучением НС", и от того, насколько качественно он будет выполнен, зависит способность решать поставленные перед ней проблемы во время эксплуатации. Работа всех сетей сводится к классификации, обобщению входных сигналов, принадлежащих n-мерному гиперпространству, по некоторому числу классов. С математической точки зрения это происходит путем разбиения гиперпространства гиперплоскостями (запись для случая однослойного перцептрона).
Алгоритм обучения с учителем:
1. Проинициализировать элементы весовой матрицы (обычно небольшими случайными значениями).
2. Подать на входы один из входных векторов, которые сеть должна научиться различать, и вычислить ее выход.
3. Если выход правильный, перейти на шаг 4.
4. Иначе вычислить разницу между идеальным и полученным значениями выхода: δ = y1-y.
Модифицировать веса в соответствии с формулой:
Wij(t+1)=Wij(t)+v(t)•δXi,
где t - номера итераций;
v - коэффициент скорости обучения;
i - номер входа;
j - номер нейрона в слое.
5. Повторить цикл с шага 2, пока сеть не перестанет ошибаться.
При работе системы датчики 5...8, 9 и 10 регистрируют наиболее важные параметры, характеризующие процесс бурения. Информация о зарегистрированных забойных параметрах передается через передающее устройство 4 на приемное устройство 12. Параметры с наземных датчиков 9 и 10 передаются на приемное устройство 12. После преобразования информации о параметрах она передается на управляющий компьютер 13, где анализируется посредством программного обеспечения 14, и в зависимости от решения, принятого нейронной сетью, на выход управляющего компьютера подается сигнал управляющего воздействия, который осуществляет конкретные действия по изменению режима бурения, например, изменяя производительность насоса 11, регулируя тем самым мощность и скорость вращения забойного двигателя 2 с породоразрушающим инструментом 3. Возможны также любые другие формы воздействия на процесс бурения, например на лебедку, превентор и т.д. Одновременно целесообразно выводить на экран монитора наиболее важные результаты измерения и команды, вырабатываемые системой. Монитор на фиг. 1 и 2 не показан.
Реализация способа осуществляется следующим образом.
Забойные параметры регистрируются датчиками 5...8, а технологические параметры - наземными датчиками контроля технологических параметров 9 и 10. Информация передается на приемное устройство 12 и далее на управляющий компьютер 13. На жестком диске управляющего компьютера 13 предварительно установлено программное обеспечение 14, база данных управления 15 и база данных САПР 16. Управляющий компьютер 13 принимает решение с учетом информации, заложенной в базе данных САПР 16. Информация о всех параметрах с датчиков 5...10 и принятых управляющих воздействиях также записывается на жесткий диск управляющего компьютера 13. (Жесткий диск на фиг. 1 и 2 не показан). При бурении последующих скважин учитывается записанная информация для принятия решения. Решения принимаются управляющим компьютером 13 и с учетом предшествующего опыта бурения скважин того же куста или месторождения, который был зафиксирован в памяти (на жестком диске) управляющего компьютера 13. Например, при одинаковых ситуациях принимаются одинаковые решения по корретировке траектории скважины или аварийному прекращению буровых работ. Опыт по бурению скважин одного и того же куста является наиболее ценным и в нашем случае он может быть передан с одной буровой на другую на дискете для компьютера или по каналам связи без перевода квалифицированных специалистов на вновь осваиваемую скважину. В этом заключается один из основных элементов самообучаемости системы. Второй элемент самообучаемости заключается в технологических особенностях нейронных сетей и описан ранее в разделе "Алгоритм обучения с учителем".
Кроме того, записанная и полученная в результате компьютерной обработки информация может передаваться для корректировки проекта САПР скважины. Например, по результатам каротажа, полученным с датчика каротажа 8, было обнаружено наличие значительного количества углеводородов, т.е. породоразрушающий инструмент 3 вошел в нефтеносный пласт на глубине значительно меньшей проектной. В этом случае база данных САПР (проект скважины) корректируется в сторону уменьшения проектной глубины скважины и процесс бурения прекращается.
Также возможно аварийное выключение систем в экстренных ситуациях, например по показаниям датчиков момента на породоразрушающем инструменте 3 или по резкому изменению осевой силы.
Применение изобретения позволило:
1. Создать самообучающуюся систему путем использования базы данных САПР и нейронных сетей.
2. Полностью автоматизировать процесс бурения скважин.
3. Повысить точность проводки наклонно-направленных и горизонтальных скважин.
4. Оптимизировать процесс строительства скважины.
5. Корректировать проект (САПР) по результатам бурения скважины.
6. Обеспечить предотвращение аварийных ситуаций.
7. Использовать опыт бурения скважин того же куста для корректировки процесса бурения и принятия решения в аварийных ситуациях.
8. Оперативно обмениваться информацией между буровыми при одновременном ведении буровых работ или с незначительным смещением во времени технологических циклов.
Изобретение относится к области бурения скважин и может быть использовано для автоматического управления процессом бурения. Задачей изобретения является повышение точности проводки скважин и предотвращение аварийных ситуаций в процессе бурения. Система содержит забойный двигатель, насос для прокачки промывочной жидкости, забойную телеметрическую систему, наземные датчики контроля технологических параметров, блок передачи информации и управляющий компьютер с программным обеспечением и базой данных управления, которая содержит сведения о проектной траектории скважины. В состав системы введена база данных САПР (системы автоматизированного проектирования), которая содержит проектные данные по конструкции скважины, характеристики оборудования, технологии процесса бурения, геологические и геофизические данные. Программное обеспечение выполнено с возможностью самообучения путем учета данных, содержащихся в базе данных САПР скважины, и учета предшествующего, полученного ранее при бурении скважин того же куста или месторождения, опыта, при принятии решения, и реализовано с использованием искусственных нейронных сетей. Искусственные нейронные сети содержат однотипные элементы ячейки, имитирующие работу нейронов мозга, обладающие группой синапсов, образующих входные связи, и аксоном, образующих выходную связь данного элемента ячейки. 1 з.п.ф-лы, 2 ил.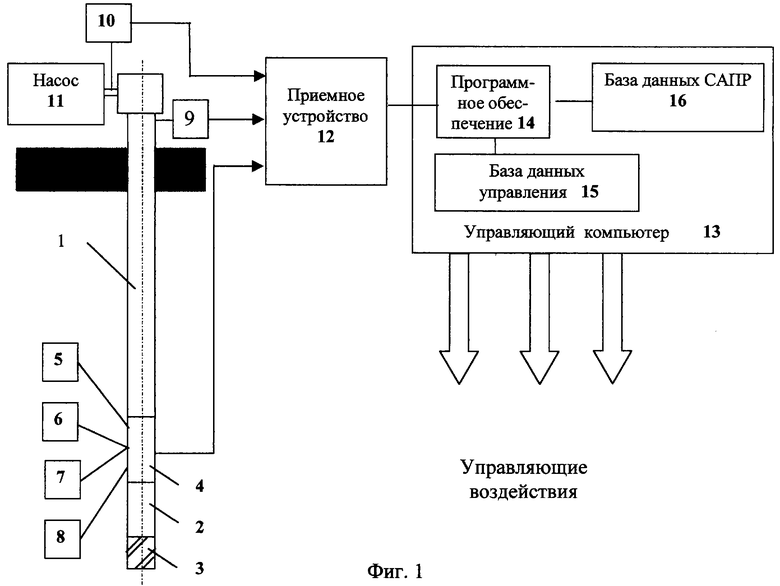
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОЦЕССА БУРЕНИЯ | 1984 |
|
SU1231946A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ СКВАЖИНЫ В ПРОЦЕССЕ БУРЕНИЯ | 1999 |
|
RU2161701C2 |
| СПОСОБ АНАЛИЗА ДИНАМИЧЕСКИХ МНОГОПАРАМЕТРИЧЕСКИХ ПРОЦЕССОВ | 2000 |
|
RU2164039C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ | 1992 |
|
RU2067170C1 |
| СПОСОБ ЭЛЕКТРОСНАБЖЕНИЯ ЭЛЕКТРОПРИЕМНИКОВ, ОБЕСПЕЧИВАЮЩИХ СЛОЖНЫЙ НЕПРЕРЫВНЫЙ ТЕХНОЛОГИЧЕСКИЙ ПРОЦЕСС ПРОМЫШЛЕННЫХ ПРЕДПРИЯТИЙ | 2007 |
|
RU2352046C1 |
| US 4852052 A, 29.12.1983 | |||
| МОЛЧАНОВ А.А | |||
| Измерение геофизических и технологических параметров в процессе бурения скважин | |||
| - М.: Недра, 1983, с.171-186 | |||
| КАЛИНИН А.Г | |||
| и др | |||
| Бурение наклонных и горизонтальных скважин | |||
| - М.: Недра, 1997, с.551-585. | |||

