Изобретение относится к способу и системе лесозаготовок и ведения лесного хозяйства согласно преамбуле прилагаемых пунктов формулы изобретения 1 и 17.
Обычные лесозаготовки и связанные с ними рабочие операции осуществляются в настоящее время сравнительно примитивным образом в том смысле, что с заготовленным лесом обращаются практически как с массовым материалом без какой-либо особо тщательной подготовки (разметки под раскряжевку) в момент осуществления заготовок. Даже если в качестве подготовки к лесозаготовкам осуществляют оценку стоящего на корню строевого леса, ее производят обычно довольно приблизительно. В результате реальный объем выхода продукции лесозаготовок может значительно отличаться от теоретической оценки этого выхода. Дополнительной проблемой современной техники лесозаготовок является то, что они имеют тенденцию к осуществлению в относительно небольших масштабах в том смысле, что, как правило, в конкретных лесозаготовках принимает участие только один продавец и один покупатель. Границы между лесными участками, принадлежащими разным владельцам, следует тщательно соблюдать, что связано с невозможностью детальной идентификации сырого лесоматериала.
Результатом перечисленных выше недостатков являются значительные издержки. Требуется выполнение больших объемов, осуществляемых без средств автоматизации работ по планированию и управлению.
Задачей настоящего изобретения в первую очередь является создание условий для обращения с заготовленным лесоматериалом не как с безликим массовым продуктом, но как с продукцией, обладающей определенной идентичностью.
Для достижения этой задачи настоящее изобретение предлагает решение, заключающееся в способе осуществления лесозаготовок с помощью валочной машины, состоящей из транспортного средства и установленного на нем валочного агрегата, причем положение валочной машины определяется валкой дерева и, по меньшей мере, одно из бревен, полученных из дерева, снабжено маркировкой, содержащей информацию о его местоположении.
Полученное таким образом бревно оказывается возможным связать с определенным местом произрастания, что означает, что после вывоза бревна с места лесозаготовок отдельный лесовладелец может с уверенностью определить, принадлежит ли данное конкретное бревно ему или кому-либо другому.
Описанное выше превращение заготовленного лесоматериала из массового продукта в отдельные, поддающиеся идентификации элементы означает также не только возможность удобного разделения продукции множества продавцов, но и возможность обслуживания множества покупателей на одной и той же лесосеке. Полная реализация идеи, лежащей в основе изобретения, предполагает, что информация о местоположении, нанесенная на бревно, должна позволять определить с точностью, из какого именно дерева получено данное бревно. Имеющее место перед заготовкой изучение главного ствола дерева должно также осуществляться рассмотренным ниже методом дистанционного анализа с точностью, позволяющей однозначно определить положение отдельного дерева, и с достаточно высокой точностью прогнозировать качество и объем полученных лесоматериалов. Такое точное предварительное изучение создает условия для очень точного предварительного расчета выхода годной продукции при лесозаготовках. Кроме того, возможно целенаправленное управление самими лесозаготовками, при котором происходит заготовка именно тех деревьев, которые позволяют получить оптимальный результат. Согласно изобретению управляющий блок, установленный на валочной машине, может быть выполнен с возможностью управления валочной машиной на основании информации, вытекающей из предварительного изучения участка леса, а также основанных на результатах этого изучения инструкций по лесозаготовке, требующих валки только заранее для этого предназначенных деревьев. Такого высокого разрешения, т.е. на уровне отдельного дерева, можно добиться только при условии осуществления точного учета леса с помощью фотографической и иной техники учета, и этот учет точно координируется с географически точными условиями. Кроме того, очень высокая степень разрешения требуется от устройства определения положения, установленного на валочной машине. Такая высокая степень разрешения достижима в настоящее время с помощью спутниковой системы ГСМ (глобальная система позиционирования).
Согласно предпочтительному варианту реализации изобретения разметку отдельных бревен, предназначенных для распиловки, считывают перед распиловкой, и эту информацию о разметке сохраняют таким образом, чтобы иметь возможность снабдить с ее помощью полученные из этого бревна доски маркировкой, включающей, по меньшей мере, информацию о месте произрастания исходного дерева. Это дает возможность для дополнительной проверки результатов лесозаготовок в отношении объема и качества полученной древесины. Возникает возможность сопоставления информации о фактическом выходе досок из данного бревна и распознавания информации относительно именно этого бревна на пилораме так, чтобы можно было получить точное заключение относительно пригодного выхода из отдельного дерева. Значительно повышаются возможности владельца участка удостовериться в том, что ценность лесных запасов для продажи согласно оценке стоящего на корню леса также реально приближается к ожидаемому реальному выходу и не слишком уменьшается в процессе обработки леса, например в результате неумелой разделки или, с другой точки зрения, не отвечающей существующим требованиям переработки.
Если даже оптимальные преимущества настоящего изобретения достигаюся при выполнении предварительного изучения и осуществлении лесозаготовок с рассмотренной выше точностью, соответствующей разрешению на уровне отдельных деревьев, возможно использование менее точного, чем это, разрешения, когда идея, лежащая в основе изобретения, реализуется в меньшей степени, например с разрешением в один или несколько метров.
Особенности системы, являющейся предметом изобретения, показаны в следующих пунктах формулы изобретения.
Детали и преимущества настоящего изобретения рассматриваются в приведенном ниже подробном описании.
Краткое описание чертежей
Ниже со ссылкой на прилагаемые чертежи приведено конкретное описание предпочтительных вариантов реализации изобретения, рассматриваемых в качестве примеров.
На чертежах:
на фиг.1 показано изображение, иллюстрирующее, каким образом данные, полученные с помощью аэрофотосъемки или иным образом, могут быть использованы для воспроизведения ландшафтов в цифровой топографической модели при высокой точности карты;
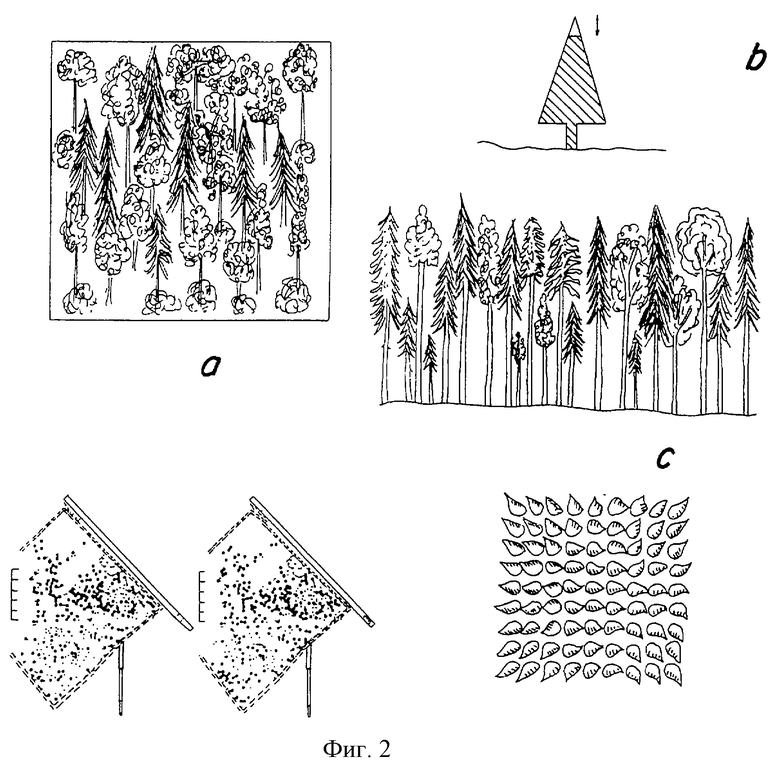
на фиг.2 показано схематическое изображение леса, где позицией а) обозначена аэрофотография части леса, позицией b) - вид сбоку части леса и позицией с) - схематическое изображение части леса при наблюдении сверху;
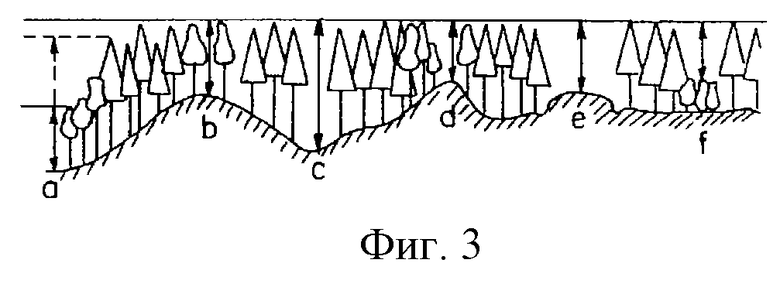
на фиг.3 показано изображение, демонстрирующее, каким образом можно объединить информацию о ландшафте и о лесоматериале с целью облегчения стратегического планирования лесоразработок;
на фиг.4 схематически показана валочная машина в рабочем положении;
на фиг.5 схематически показано, каким образом организация, занимающаяся лесозаготовками, может быть связана с центром управления;
на фиг.6 схематические показано, каким образом в потоке материала, поступающего к покупателю, можно за счет применения способа разметки, являющегося предметом настоящего изобретения, проследить индивидуальность и происхождение отдельного бревна;
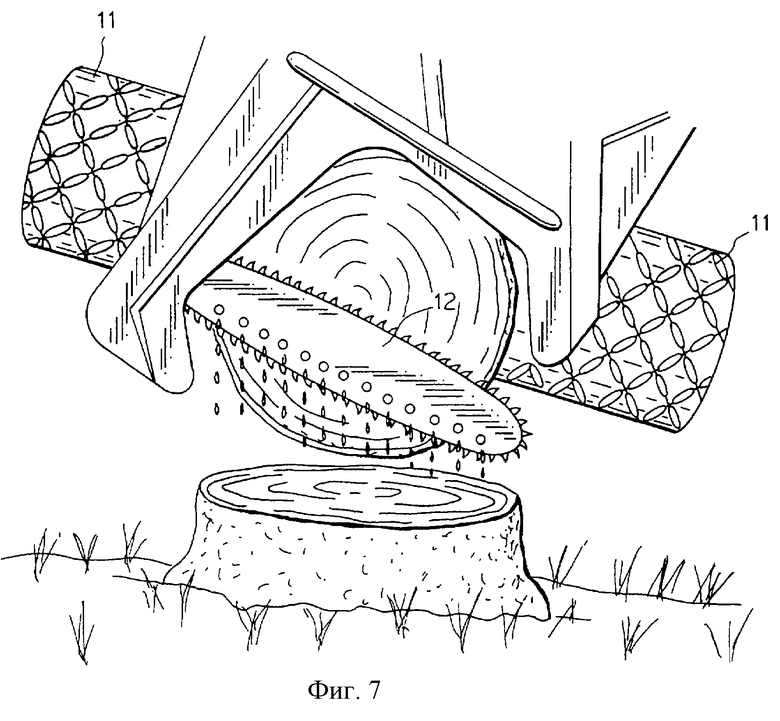
на фиг. 7 показано трехмерное детальное изображение, иллюстрирующее разгрузочный конец валочного устройства, снабженный режущим средством;
на фиг.8 схематически показано, каким образом согласно изобретению производится разметка одного конца бревна;
на фиг. 9 схематически показано трехмерное изображение, иллюстрирующее разметочное устройство с разметочными средствами, которые могут смещаться из рабочего в нерабочее положение и наоборот;
на фиг.10 схематически показано разметочное средство типа пробойника;
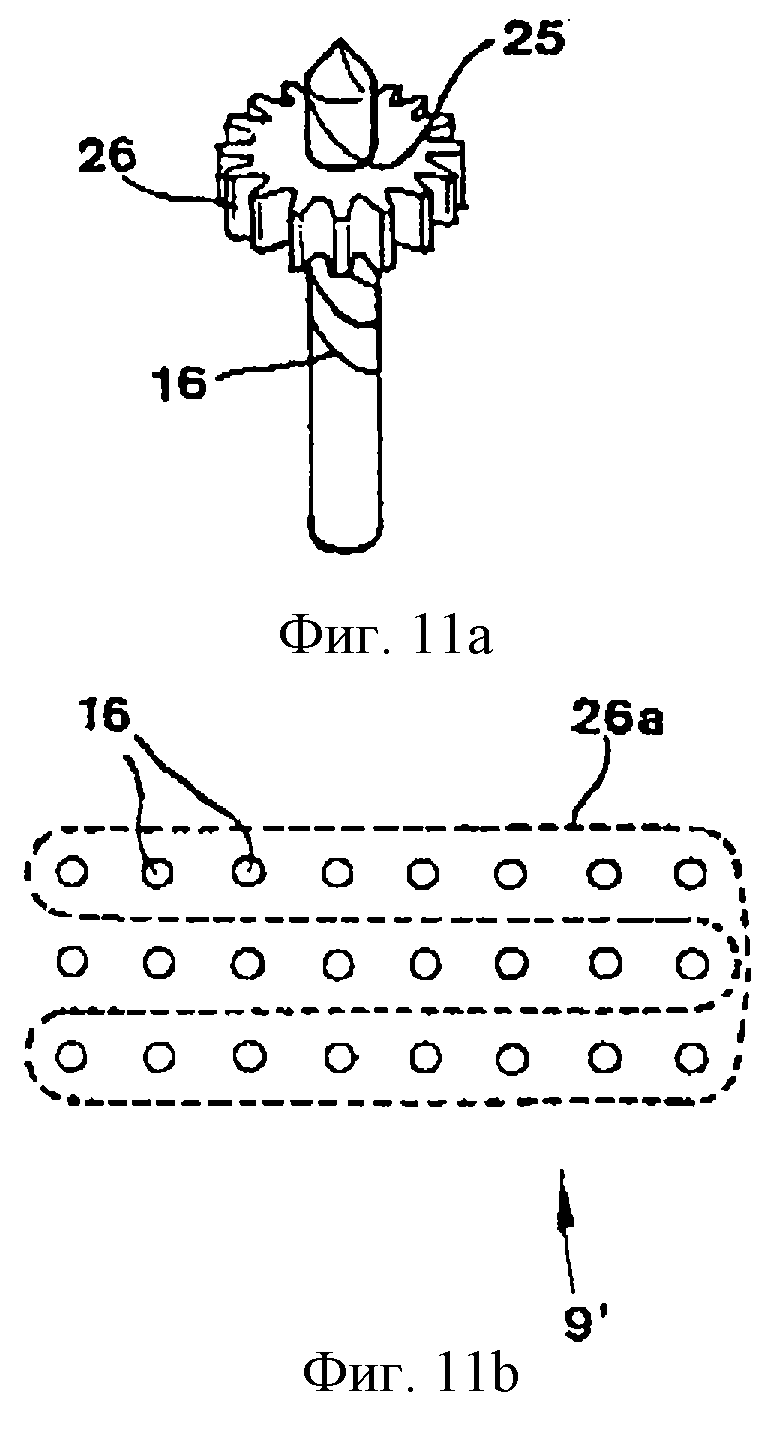
на фиг. 11а и b схематически показано альтернативное разметочное средство;
на фиг.12 показан еще один вариант разметочного устройства;
на фиг. 13 показано перспективное изображение устройства для окорения бревен на входе пилорамы;
на фиг.14 показано схематическое изображение валочной машины с устройством определения положения, включающим в себя блок определения положения на транспортном средстве валочной машины и средство определения положения валочного устройства относительно блока определения положения;
на фиг. 15 показано техническое решение, являющееся альтернативой показанному на фиг.14;
на фиг.16 показан другой вариант;
на фиг.17 показан еще один вариант;
на фиг.18 показано схематическое изображение, иллюстрирующее, каким образом установленный на валочной машине сканер может использоваться для сканирования деревьев таким образом, чтобы информация о сканировании могла использоваться в управляющем блоке для принятия решения о переработке или прогнозе переработки (определяя, в каких случаях осуществляется раскряжевка).
Подробное описание предпочтительного варианта реализации
Существует стремление к созданию основы для принятия эффективных решений в области лесного хозяйства для полного использования преимуществ настоящего изобретения. С одной стороны, оно направлено на получение возможности к созданию с высокой экономической эффективностью высококачественных описаний территорий (геология, геология четвертичного периода, физическая география, гидрология, климатология, почвы, биология растительности, геология питания и различные карты).
На фиг. 1 показано, каким образом можно с помощью различной регистрирующей техники, в частности аэрофотосъемки, получить информацию, которую можно использовать для воспроизведения ландшафта в цифровой топологической модели при высокой точности карты. Кроме того, необходим точный учет лесных запасов на участке ландшафта. В данном случае предпочтительным является использование также различных приемов учета лесных запасов с самолетов, например фотограмметрии и техники анализа изображений. Аэрофотоснимок показан на фиг.2а и на нем можно различить отдельные деревья. С помощью подходящей техники анализа изображений и знания характеристик различных видов деревьев, а также их среды обитания при различных условиях, можно получить сравнительно точную оценку качества и объема древесины по отдельным деревьям. С помощью по-настоящему точной воспроизводящей техники, применяемой для воспроизведения с очень высокой точностью точных координат на карте, можно с отклонением порядка нескольких сантиметров или, по крайней мере, дециметров определить местоположение отдельного дерева.
На фиг. 2с продемонстрирована тенденция к восприятию отдельных деревьев как отклоняющихся от центра изображения в центральной проекции относительно воспроизводящей техники. Качественной оценки для целей продажи стоящего на корню строевого леса можно добиться с учетом затененности, совмещения силуэтов деревьев, диаметра листьев и массы хвои, их цвета и т.д. Эта оценка может послужить основой для принятия при разработке стратегии лесозаготовок очень точных и верных решений.
На фиг. 3 показано, каким образом в поперечном воспроизведении объединяется информация о ландшафте и о лесоматериале, облегчая планирование лесозаготовок.
На фиг.4 показана валочная машина, обозначенная в целом позицией 1, которая состоит из базового транспортного средства 2 и установленного на нем валочного механизма 3. Валочный механизм 3 в данном случае установлен на базовом транспортном средстве 2 с помощью крана 4. Валочный механизм 3 в данном случае представлен так называемым узкозахватным валочным механизмом, т.е. механизмом, предназначенным для захвата стоящего дерева, его спиливания, укладки в положение, показанное на фиг.4, после чего с помощью подающего устройства ствол пропускают через механизм при одновременной обрезке сучьев. Ствол можно с помощью режущего устройства распилить на отдельные бревна. Следует подчеркнуть, что настоящее изобретение в этом отношении так же хорошо применимо в случаях, когда предполагается обойтись без обрезки сучьев, т. е. только при поперечной распиловке на бревна. Однако изобретение применимо также и в случае работы с цельными хлыстами, т.е. тогда, когда валочный механизм применяется для того, чтобы спилить дерево и повалить его, однако без выполнения раскряжевки на меньшие части.
Применяемое в формуле изобретения выражение "бревно" в данном случае относится ко всему хлысту в целом. Валочный механизм можно при желании снабдить средством для обрубки ветвей так, чтобы иметь возможность освобождать хлыст от ветвей путем пропуска хлыста через механизм также при полной обработке хлыста. На валочной машине установлено устройство определения местоположения, обозначенное в целом позицией 5, которое может определять положение валочной машины с помощью внешних сигналов, передающихся без проводов. Предпочтительной является работа устройства определения местоположения согласно системе ГСМ (ГСМ = глобальная система позиционирования). Это спутниковая система определения местоположения, создающая условия для достижения очень высокой точности при определении местоположения. Спутниковые сигналы в действительности подвергаются искажениям. На практике искажения корректируют посредством сигналов, излучаемых наземной станцией. Эти сигналы воспринимаются устройством определения местоположения и могут наряду со спутниковыми сигналами способствовать достижению очень высокой точности определения местоположения.
Спутник ГСМ обозначен на фиг.4 позицией 6, в то время как антенна устройства определения местоположения 5 обозначена позицией 7. На изображении, показанном в увеличенном масштабе на фиг.4 в круге, показано, каким образом водитель валочной машины имеет доступ к блоку управления, лучше всего компьютеру с экраном дисплея, соединенному с устройством определения местоположения. Этот управляющий блок может в действительности быть адаптивным компьютером, обладающим программным и аппаратным обеспечением, необходимыми для определения местоположения.
На валочной машине 1 установлено маркировочное устройство, показанное на фиг. 9 и обозначенное в целом позицией 9. Это маркировочное устройство 9 предназначено для нанесения маркировки на бревна, полученные из деревьев. С помощью управляющего блока 8 маркировочным устройством 9 управляют таким образом, чтобы наносить на бревно (см., например, бревно, обозначенное позицией 10 на фиг. 8) информацию о местоположении, т.е. информацию о месте произрастания дерева, на основе информации, полученной от устройства 5 определения местоположения.
Валочная машина 1 содержит средства для распознавания и ввода информации, касающейся качества и/или размеров бревна. Управляющий блок 8 дает команду маркировочному устройству нанести на бревно информацию, относящуюся к его качеству и размерам. В том случае, когда из одного хлыста получается много бревен, желательно, чтобы валочная машина 1 содержала средство для автоматического распознавания или ввода вручную информации, касающейся положения данного бревна в хлысте, и чтобы управляющий блок 8 мог дать команду маркировочному устройству нанести на бревно эту информацию о положении. Кроме того, желательно нанести на бревно информацию, касающуюся фактического покупателя этого бревна, а также возможно информацию, касающуюся продавца этого бревна. Информация, касающаяся продавца, наверняка будет не нужна, если можно связать продавца с местом произрастания дерева.
На фиг. 7 показана отгрузочная сторона валочного механизма 3, т.е. сторона, с которой посредством подающего средства 11 механизма производится выгрузка бревен. Механизм содержит на этой отгрузочной стороне режущее средство 12, предназначенное для отрезания пропускаемых через него бревен. В данном примере режущим средством служит установленная на шарнире качающаяся цепная пила. Конечно возможно применение и других режущих средств.
Маркировочное устройство, являющееся предметом настоящего изобретения, предпочтительно устанавливается на выходной стороне валочного механизма так, чтобы на бревно, пропускаемое через него согласно варианту реализации, наносили маркировку сразу после его отделения от остального хлыста. Соответственно маркировка может быть нанесена на торец свободно падающего бревна, что предъявляет довольно высокие требования к быстродействию. Однако вполне возможны и другие варианты реализации. Так, маркировочное устройство может быть приспособлено для нанесения маркировки на боковую поверхность бревна возможно после освобождения этой части поверхности от коры. Согласно другому варианту реализации можно также наносить маркировку на бревно, еще не отделенное от остального хлыста, однако для этого необходим прогноз относительно качества и объема этого бревна. В случае неправильности прогноза могут возникнуть отклонения.
Возможность выполнения маркировки бревна заключается в объединении маркировочного средства и режущего средства 12, например путем снабжения режущего средства 12 маркировочным средством, пригодным для этой цели. Оно может быть как контактного (пробивка отверстий, резание, сверление, штамповка) так и неконтактного (лучевая энергия, напыление красителя) типа. Согласно возможному варианту реализации маркировочное устройство может представлять собой распылительные сопла, приспособленные для напыления на отрезаемое бревно маркировки, содержащей уже рассмотренную выше информацию. Для этого требуется относительно большое количество сопел. В принципе было бы возможно наносить маркировку, содержащую значительный объем информации, на весь торец бревна. Конечно допустим также и более ограниченный объем информации.
На фиг. 8 показано, каким образом на бревно, обозначенное позицией 10, наносится маркировка, обозначенная позицией 13 и состоящая из сетки отверстий, пробитых в торце бревна. Маркировка содержит также справочную метку 14, позволяющую правильно считывать сетку. Возможное количество отверстий в сетке может быть очень большим, например 100 и более, что зависит от требуемого объема информации, желательно наносить маркировку на торцевую поверхность бревна, поскольку это обычно облегчает последующее считывание информации маркировки.
На фиг. 9 показано, что маркировочное устройство 9 состоит из корпуса, обозначенного позицией 15, в котором размещено несколько маркировочных средств. В данном примере они имеют характер пробойников, которые избирательно переводятся в рабочее маркировочное положение или нерабочее положение покоя. Пробойники, например, считаются находящимися в рабочем положении будучи выдвинуты и в нерабочем положении - будучи отведены назад. Таким образом, эти пробойники предназначены для того, чтобы прижиматься к торцу бревна таким образом, чтобы маркировочные средства, находящиеся в данный момент в рабочем положении, т.е. выдвинутые, вдавливались в поверхность торца бревна.
На фиг. 5 показано, каким образом занимающаяся лесозаготовками организация может быть связана с центром управления 17, который может поддерживать связь с различными подразделениями этой организации по телефону или по радио. Валочная машина обозначена позицией 1, и информация о поваленном лесе передается с ее блока управления 8 в центр управления 17, а из центра управления 17 на валочную машину посылают сигналы, предназначенные для управления работой валочной машины 1 по валке леса, например, таким образом, чтобы работа была сосредоточена на запрошенном в данный момент сортименте. Центр управления 17 находится также в контакте с другими подразделениями занимающейся лесозаготовками организации, такими как транспортные средства, а также с потребителями древесного сырья, например пилорамами или целлюлозно-бумажными предприятиями. Центр управления 17 в каждый конкретный момент времени будет иметь информацию соответственно о наличных объемах лесоматериалов и о тех объемах, которые могут быть получены в процессе лесозаготовок с учетом качества и объемов, так что с помощью центра управления можно очень быстро заключить деловые соглашения. Иными словами, центр управления может служить "электронной" лесной биржей.
На фиг. 6 показано, каким образом бревно 10 готовится к распиливанию на доски на пилораме. Вход пилорамы схематически обозначен позицией 18. Воспроизводящее устройство 19 совмещается со входом пилорамы и приспособлено для воспроизведения торцевой поверхности бревна перед распиливанием, регистрируя и сохраняя на этом изображении информацию о форме, например диаметре и толщине коры, и/или росте, например ширине годовых колец. На основе информации, полученной через воспроизводящее устройство, входящее в состав системы оборудование может выполнить анализ и выдать прогноз, относящийся к росту леса в течение определенного времени для участка леса, с которого поступают бревна. Конечно условием для этого является наличие считывающего устройства 20, размещенного на входе пилорамы для считывания маркировки отдельного бревна и сохранения содержащейся в маркировке информации. Связанный с пилорамой блок управления приспособлен для управления дополнительным маркировочным устройством на пилораме с целью снабжения досок, полученных из конкретного бревна 10, маркировкой, содержащей хотя бы информацию о первоначальном месте произрастания дерева. Таким образом, могут быть получены доски, которые можно проверить относительно места произрастания так, чтобы покупатели, озабоченные проблемами охраны окружающей среды, могли быть уверены, что приобретают доски, поступающие из источников, приемлемых с точки зрения охраны окружающей среды.
Воспроизводящее устройство 19 и считывающее устройство 20 могут конечно состоять из одного и того же блока.
Маркировка бревна 10 и считывание этой маркировки позволяют согласовывать маркировку с информацией о реальном экономичном выходе продукции из бревна после распиливания. Информацию, касающуюся этого выхода годного и места произрастания дерева, из которого получено бревно, можно затем сопоставить с информацией, уже имеющейся в лесной базе данных, а именно информацией, первоначально в рамках учета стоящего на корню товарного леса, и информацией, нанесенной на бревно в процессе лесозаготовок посредством маркировочного устройства, соединенного с валочным механизмом.
На фиг. 10 показано, каким образом может быть изготовлено маркировочное средство 16, уже показанное на фиг.9. Маркировочное средство типа пробойника предпочтительно имеет трубчатый передний конец, в который при прижимании к древесному материалу бревна входит кусок древесины. Пробойное средство 16 имеет боковое отверстие 21, через которое можно удалить древесный материал, поступающий в трубчатый конец пробойного средства. Пробойное средство 16 может поворачиваться вокруг оси, параллельной направлению пробивки, так что древесный материал, попавший в пробойный конец пробойного средства, может быть отделен от бревна и удален через отверстие 21.
Криволинейное выдвижное средство 22 предназначено для выдвижения пробивного средства 16 в его рабочее положение и это средство приспособлено как для выдвижения, так и для поворота пробивного средства. Выдвижное средство 22 поворачивается при обратном движении пробивного средства в исходное положение. Выдвижное средство 22 может также быть приспособлено для принудительного отвода пробивного средства или, в качестве альтернативы (или дополнения), для обратного движения может служить пружина 23, показанная на фиг.10.
Существует возможность сочетания пробивных средств, показанных на фиг. 10, с маркировкой посредством красителя, лучше всего путем снабжения пробивного средства каналом 24 для краски, через который краситель поступает из резервуара в область передней горловины пробивного средства. Цель заключается в том, чтобы в отверстие, полученное на торце бревна, поступил краситель так, чтобы оно было более отчетливо видно.
Альтернативный вариант 9' маркировочного устройства показан на фиг.11. В данном случае маркировочное средство 16 состоит из ряда сравнительно небольших сверл, размещенных в блоке и соответственно способных вращаться. Каждое из этих сверл может, например, входить в центральное отверстие 25 зубчатого колеса, обозначенного позицией 26, наружные зубцы которого предназначены для того, чтобы входить в зацепление с криволинейной лентой 26а. Сверла 16 и отверстие 25 в зубчатом колесе снабжены средствами зацепления, не допускающими вращения сверл относительно зубчатого колеса. Когда криволинейная лента 27 движется по дорожке, показанной на фиг.11b, криволинейная лента соответственно должна входить в зацепление с различными зубчатыми колесами, которые соответственно вращаются, вызывая одновременное вращение сверл 16. Сверла 16 могут аксиально смещаться относительно зубчатых колес 26, так что с помощью средств аксиального смещения, не показанных на фиг.11, возможен перевод нужных сверл в рабочее положение для маркировки. Дальнейшее функционирование подобно уже описанному со ссылкой на фиг.9, т.е. работающее в данный момент сверловое маркировочное средство 16 выдвигается, в то время как другие остаются отведенными.
В варианте 9", показанном на фиг.12, корпус маркировочного устройства имеет вид вращающегося колеса. В данном случае маркировочные средства 16 могут двигаться в радиальном направлении, так что они могут выдвигаться через периферийные отверстия в колесе. В соответствии с этим исполнительные средства размещаются внутри колеса, так что возможно избирательное выдвижение маркировочного средства 16, посредством которого на данное бревно наносят необходимую маркировку. Маркировочное устройство по п. 12 может использоваться таким образом, чтобы маркировать наружную поверхность бревна возможно на участке, очищенном от коры, или же наносить маркировку сквозь кору или на самой коре, но можно также использовать принцип колеса при маркировке торцевой поверхности бревна.
Допустимы конечно и другие средства маркировки. Полезная техника маркировки основывается на применении средств, излучающих лазерные лучи, наносящих маркировку, предназначенную для хлыста, например, в форме штрихового кода или иным образом. Несколько лазерных маркировочных средств могут быть размещены в форме блока способом, уже описанным для механических вариантов реализации. Конечно для целей маркировки возможно наряду с лазерной техникой применение других видов лучевой энергии.
Возможно также сконструировать маркировочное устройство таким образом, чтобы оно наносило информацию маркировки на отдельный носитель, который, в свою очередь, наносится на бревно. Он может, например, иметь форму клейкой ленты с маркировочной информацией в форме штрихового кода или иного кода.
На фиг.13 показано, каким образом на входе пилорамы может быть размещено очистное оборудование, предназначенное для удаления с бревна загрязнений, снега или льда, которые, в противном случае, могут затруднить считывание маркировочной информации. Очистное устройство может, например, иметь характер парового душа. В случае нанесения маркировочной информации на торец бревна достаточно конечно выполнить операцию по очистке только в этом месте.
Следует подчеркнуть, что считывающие устройства типа обозначенных позициями 19 и 20 на фиг.6 могут конечно располагаться не только на пилораме или подобном ей агрегате. Такие считывающие устройства могут располагаться в других местах, в которых существует потребность в сортировке бревен в зависимости от имеющейся на них маркировки. Так каждый покупатель может получать именно те бревна, которые ему требуются. Техника маркировки означает в целом, что каждое отдельное бревно может повергаться индивидуальной обработке в показанной на фиг. 5 системе лесозаготовок, так что покупатель получает гораздо больше возможностей получить в свое распоряжение бревна, лучше всего соответствующие его сфере применения.
На фиг.14 показана валочная машина, как и ранее снабженная устройством 5 определения местоположения. Кран, применяемый на фиг.14, имеет несколько иную конструкцию, чем показанный на фиг.4. В варианте реализации, показанном на фиг. 14, устройство определения местоположения 5, так же как в варианте реализации согласно фиг.4, сконструировано таким образом, что блок определения положения 27 располагается на транспортном средстве, например в кабине, которая в данном случае может поворачиваться, в то время как устройство определения местоположения включает в себя также средство определения валочного механизма 3 относительно блока определения положения 27. Поскольку положение блока 27 известно и относительное положение блока 27 и механизма 3 также поддается определению, можно также определить положение дерева, находящегося в механизме 3.
Средство для определения положения валочного механизма 3 относительно блока 14 включает в себя, на фиг. обозначенный позицией 26, 14, измеритель расстояния, например, лазерного типа, позволяющий измерить расстояние от него до ствола дерева, удерживаемого в механизме 3. Если измеритель расстояния 28 комбинируется с угловыми датчиками, размещенными в каждом шарнире между двумя взаимно подвижными частями стрелы крана, а также датчиком направления (компасом) на кране 4 или кабине, можно с высокой точностью определить расстояние и направление, в котором располагается механизм 3 относительно блока 27. Положение механизма 3 можно затем сравнить с информацией в блоке управления валочной машины, так что водитель может сравнивать истинное положение валочного механизма 3 с требующимся положением согласно инструкции по валке. Водитель может, таким образом, гораздо легче находить деревья, которые он должен повалить согласно инструкции по валке.
Несколько иной тип валочной машины показан на фиг.15. Само транспортное средство также должно иметь в данном случае блок 27 определения положения и измеритель расстояния, обозначенный позицией 28. Измеритель служит для измерения расстояния между стволом и узлом 29 крана, который может только поворачиваться относительно транспортного средства. В случае, если узел 29 и кабина транспортного средства, т.е. часть, в которой установлен блок 27, не могут поворачиваться относительно друг друга, но поворачиваются вокруг вертикальной оси как единое целое, для регулировки вращения кабины и узла 29, кроме измерителя расстояния, требуется только один датчик, т.е. компас. В случае, если бы узел 29 мог бы поворачиваться вокруг вертикальной оси относительно кабины, потребовался бы дополнительный датчик для определения угла между этим узлом 29 и остальным транспортным средством.
На фиг.16 показан альтернативный вариант, в котором устройство 5 определения местоположения включает в себя два блока определения положения соответственно 27 и 27'. Можно видеть, что блок 27 располагается на кабине транспортного средства, в то время как блок 27' располагается на стреле крана. Наличие двух таких блоков определения положения, которые должным образом связаны с блоком управления 8, имеющимся в валочной машине, причем последний блок способен анализировать сигналы от этих блоков в целях определения местоположения, означает возможность всегда определять направленность стрелы крана, в том числе во время движения. Как и в предыдущем варианте реализации, этот вариант предусматривает использование измерителя расстояния 28. Это означает, что единственным дополнительным датчиком, требующимся для однозначного определения положения ствола, находящегося в валочном механизме, является угловой датчик 30, находящийся между двумя самыми удаленными частями стрелы крана. В этой связи следует указать, что второй блок определения положения 27' не следует размещать слишком близко к валочному механизму, поскольку существует опасность его повреждения или же экранирования ветвями, хвоей или листьями.
На фиг. 17 показан еще один альтернативный вариант устройства 5 определения положения с блоком 27 определения положения, размещенном в кабине транспортного средства. В варианте реализации, показанном на фиг.17, предусматривается наличие угловых датчиков в каждом шарнирном соединении стрелы крана. Это справедливо также и для соединения между краном и транспортным средством. Кроме того, механизм должен быть дополнен датчиком направления, т. е. компасом, для определения направленности крана относительно блока 27 определения положения.
На фиг.18 показано, каким образом от измерителей расстояния 28, изображенных на фиг.14, 15 и 16, можно добиться выполнения дополнительной функции, а именно, служить сканирующим устройством для сканирования предназначенных для заготовки деревьев перед валкой конкретного дерева. Такое сканирующее устройство, например, лазерного типа соединяется должным образом с блоком управления валочной машины, снабжая его информацией сканирования, которая используется в блоке управления для определения процесса предварительной обработки или прогнозирования предварительной обработки. На фиг.18 схематически показано, каким образом созданная сканирующим устройством 28 информация в форме изображения ближайших деревьев может быть использована после должной переработки сигналов в блоке управления в качестве основы для выдачи предложений относительно предварительной обработки конкретных деревьев (темные столбцы с цифрами, изображенные рядом с деревьями на фиг.18) с возможным также указанием классов качества.
Прогноз предварительной обработки или разметки для раскряжевки, определенный сканирующим устройством 28, может быть компенсирован или уточнен путем соответствующего сопоставления с результатами измерений, полученными на основе предварительного учета стоящего на корню товарного леса для отдельного дерева. Таким образом, водитель валочной машины может с помощью блока управления 8 валочной машины получить от блока управления гораздо более точные предложения по предварительной обработке.
Следует подчеркнуть, что применение настоящего изобретения не ограничивается конечно типами валочных машин, показанных на чертежах. Соответственно изобретение применимо также к таким валочным машинам, на которых стрела снабжена только так называемой валочной головкой, т.е. узлом, способным срезать и повалить дерево, которое после этого краном укладывают на перерабатывающую машину, смонтированную на шасси транспортного средства и обычно снабженную как средствами для обрезки ветвей, так и режущими средствами. Таким образом, в такой машине сама валочная головка должна рассматриваться в качестве эквивалента валочному механизму, описанному выше, в том смысле, что требуется определить непосредственное положение валочной головки так, чтобы посредством этого определить местоположение дерева. Иначе говоря, идея, лежащая в основе изобретения, совершенно не зависит от того, комбинируется ли дополнительное обрабатывающее оборудование с узлом валки деревьев, т.е. смонтировано ли оно на стреле крана, или же оно размещается на шасси транспортного средства, так что стволы укладываются краном на обрабатывающую часть.
Понятно, что изобретение не ограничивается исключительно вариантами реализации, рассмотренными выше. Указывают, например, что было бы возможно определять положение валочного механизма относительно блока определения положения, установленного на валочной машине, с помощью произвольной сенсорной техники, такой как видеофотограмметрия, иная видеотехника и т.п. В целом можно указать, что специалистам в данной области техники очевидна возможность многочисленных модификаций на основе представленной базовой идеи изобретения.













Изобретение относится к лесной промышленности. В способе лесозаготовок в процессе валки деревьев определяют положение валочной машины с помощью, по меньшей мере, одного расположенного на ней устройства определения местоположения посредством внешних, принимаемых без проводов сигналов. На валочной машине установлено маркировочное устройство, предназначенное для нанесения на бревна маркировки. Блок управления, обычно компьютер, установлен на валочной машине для управления маркировочным устройством для нанесения на бревно маркировки с информацией о местоположении валочной машины. Это позволит более эффективно и рационально обрабатывать и использовать лесоматериал. 2 с. и 29 з.п. ф-лы, 18 ил.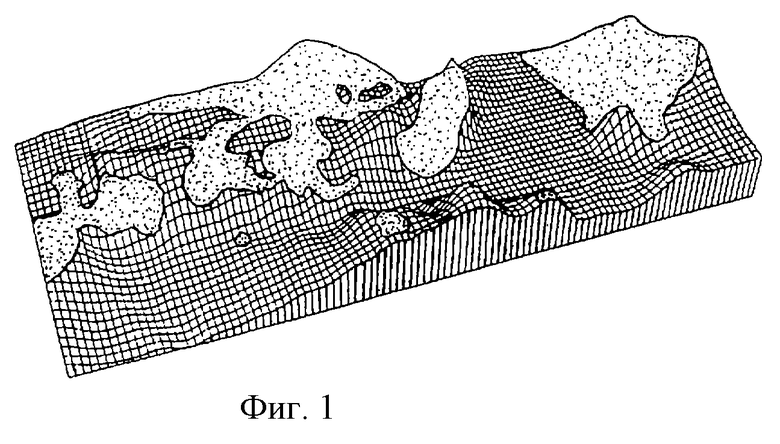
| Огнетушитель | 0 |
|
SU91A1 |
| DE 4232412 А1, 31.03.1994 | |||
| Обзорная информация "Лесоэксплуатация и лесосплав, вып.20 | |||
| - М.: ВНИПИЭИлеспром, 1985, с.26, 27; Экспресс-информация | |||
| Лесоэксплуатация и лесосплав, №3 | |||
| - М.: ВНИПИЭИлеспром, 1990, с.43-45. | |||
