Изобретение относится к области радиолокационной техники и может быть использовано в радиолокаторах, осуществляющих поиск и слежение за воздушными и космическими объектами.
Известно устройство определения дальности, входящее в состав радиолокатора, представленного в книге Радиотехнические системы, М.: Высшая школа, Ю.М. Казаринов, стр.194-198. Оно состоит из передающего и приемного устройств, блока индикации и определения дальности и синхронизатора. Однако оно неспособно определить дальность при увеличенной частоте следования зондирующих импульсов.
Известно устройство определения дальности, входящее в состав радиолокатора, изложенного в патенте 2073883, автор Часовской А.А., 1997 г. В нем с помощью передающего устройства осуществляется излучение пачек зондирующих импульсов, следующих с увеличенной частотой. Период их следования равен максимальной задержке отраженного сигнала. Дальность определяется в преобразователе дальности как временное рассогласование между интервалами пачек импульсов, излучаемых передающим устройством и принимаемых приемным устройством. Формирование пачек осуществляется следующим образом. Синхронизатор формирует импульсы, следующие с частотой, превышающей частоту следования зондирующих импульсов известных радиолокаторов в десять и более раз. Счетчик считает определенное количество этих импульсов и далее самостоятельно устанавливается в исходное состояние. В момент счета последнего импульса срабатывает дешифратор и через инвертор выдает запрет элементу совпадения на прохождение управляющих импульсов с синхронизатора. Таким образом, формируются следующие друг за другом пачки импульсов с периодом два интервала между импульсами. Одновременно в момент счета последнего импульса с дешифратора поступает импульс отсчета дальности в преобразователь дальности.
Приемник осуществляет преобразование электромагнитной энергии в электрическую и выдает пачки сигналов в узлы, осуществляющие выделение интервала между пачками. В состав этих узлов входят три линии задержки, инвертор, четыре элемента совпадения. Однако из-за флюктуаций сигналов могут возникнуть ложные дальности.
С помощью предлагаемого устройства устраняется появление ложных дальностей. Достигается это введением линии задержки, равной времени следования пачки импульсов, а также введением второго дешифратора и пятого элемента совпадения, при этом выход второго элемента совпадения соединен с первым входом пятого элемента совпадения, второй вход которого соединен через линию задержки, равной времени следования пачки импульсов, с первым входом четвертого элемента совпадения и с выходом третьего элемента совпадения, первый вход которого через вторую линию задержки соединен с первым входом пятого элемента совпадения, имеющего выход, соединенный через третью линию задержки с вторым входом четвертого элемента совпадения, к тому же выход счетчика соединен через второй дешифратор с входом первого инвертора.
На фиг.1 и в тексте приняты следующие обозначения: 1 - синхронизатор, 2 - счетчик, 3, 4 - дешифраторы, 5 - инвертор, 6 - первый элемент совпадения, 7 - приемное устройство, 8 - передающее устройство, 9 - инвертор, 10 - первая линия задержки, 11 - второй элемент совпадения, 12 - вторая линия задержки, 13 - третий элемент совпадения, 14 - преобразователь дальности, 15 - линия задержки, равной времени следования пачки импульсов, 16 - четвертый элемент совпадения, 17 - пятый элемент совпадения, 18 - третья линия задержки.
При этом выход приемного устройства 7 через первую линию задержки 10 соединен с первым входом второго элемента совпадения 11 и через инвертор 9 с вторыми входами второго элемента совпадения 11 и третьего элемента совпадения 13, имеющего первый вход и выход, соответственно соединенные: через вторую линию задержки 12 с первым входом пятого элемента совпадения 17, а также с выходом второго элемента совпадения 11 и с первым входом четвертого элемента совпадения 16, а также через линию задержки, равной времени следования пачки импульсов 15, с вторым входом пятого элемента совпадения 17, имеющего выход, соединенный через третью линию задержки 18 с вторым входом четвертого элемента совпадения 16, выход которого соединен с вторым входом преобразователя дальности 14, имеющего первый вход, соединенный через дешифратор 3, счетчик 2 с выходом синхронизатора 1, соединенного с первым входом первого элемента совпадения 6, имеющего выход и второй вход, соответственно соединенные с входом передающего устройства 8 и через инвертор 5, дешифратор 4 с входом счетчика 2.
Работа устройства осуществляется следующим образом.
Синхронизатор 1 формирует импульсы, следующие с частотой, превышающей частоту следования зондирующих импульсов известных радиолокаторов в десять и более раз. Счетчик 2 считывает определенное количество этих импульсов и далее самостоятельно устанавливается в исходное состояние. В момент счета, например, последнего импульса срабатывает дешифратор 3 и выдает импульс начала отсчета дальности и преобразователь дальности 14. Дешифратор же 4 срабатывает в момент счета, например, двух последних, следующих друг за другом импульсов и выдает в период наличия этих импульсов через инвертор 5 запрет элементу совпадения 6 на прохождение управляющих импульсов с синхронизатора 1 на вход передающего устройства 8. Передающее устройство 8 формирует и излучает электромагнитные импульсы, следующие в зоне, ограниченной диаграммой направленности, в виде следующих друг за другом пачек импульсов с периодами следования, равными максимальной задержке отраженного сигнала, и с интервалами, например, равными времени следования трех импульсов. Приемное устройство 7 осуществляет преобразование электромагнитной энергии в электрические сигналы и выделение сигнала от объектов. В момент отсутствия очередного импульса сработает второй элемент совпадения 11, на первый вход которого подается задержанный первой линией задержкой 10 импульс, а второй соединен через инвертор 9 с выходом приемника 7. Так как величина задержки первой линии задержки 10 равна периоду следования импульса, то в случае отсутствия очередного импульса на выходе второго элемента совпадения 11 будет иметь место положительный сигнал, который через вторую линию задержки 12, также равной периоду следования импульсов, поступает на первый вход третьего элемента совпадения 13, у которого второй вход также соединен через инвертор 9 с выходом приемника 7. Следовательно, третий элемент совпадения 13 сработает при повторном отсутствии импульса, что имеет место при отсутствии двух следующих друг за другом импульсов. С выхода третьего элемента совпадения 13 импульс задерживается на время следования пачки импульсов с помощью линии задержки, равной времени следования пачки 15, и поступает на второй вход пятого элемента совпадения 17.
Для пояснения воспользуемся фиг.2, где показано временное положение двух пачек импульсов. Точкам а, b и с соответствуют времена наличия импульсов на выходах: второго элемента совпадения 11, третьего элемента совпадения 13 и линии задержки, равной времени следования пачки импульсов 15. Однако пятый элемент совпадения 17 сработает только в случае поступления на первый вход импульса с выхода второго элемента совпадения 11 и выдаст импульс, который снова задержится на время, равное периоду следования импульса с помощью третьей линии задержки 18, и поступит на второй вход четвертого элемента совпадения 16. Последний сработает в случае наличия импульса на выходе третьего элемента совпадения 13, что соответствует временному положению точки d на фиг.2. Следовательно, четвертый элемент совпадения 16 сработает при отсутствии двух импульсов до следования и после следования пачки, что исключает вероятность ложного срабатывания, а следовательно, и ложного определения дальности. Импульс на выходе четвертого элемента совпадения 16 является импульсом окончания отсчета дальности и поступает на первый вход преобразователя дальности 14. Преобразователь дальности определяет временное рассогласование между запускающим импульсом с выхода дешифратора 3 и импульсом с выхода четвертого элемента совпадения 16. Пример исполнения преобразователя дальности представлен, например, в книге Васин и др. Справочник-задачник по радиолокации, 1977 г. Первый отсчет дальности осуществляется после прихода второй пачки, так как необходимо время для исключения ложной дальности.
При увеличении интервалов между пачками дешифратор 4 срабатывает на период счета такого количества последних импульсов в пачке, которое соответствуют длительности этих интервалов, а дешифратор 3 будет по-прежнему срабатывать в моменты, соответствующие точкам b и c (фиг.2).
Приведем пример конкретного исполнения.
Пусть предлагаемое устройство осуществляет излучение импульсов длительностью 1 мкс в виде пачек в количестве 12 импульсов с интервалом, равным трем периодам следования импульсов. Тогда при максимальной дальности действия 1000 км интервал между импульсами будет составлять 470 мкс, а интервал между пачками импульсов - 1410 мкс.
При использовании предлагаемого устройства в обзорном радиолокаторе с шириной диаграммы направленности, равной 1 градус за время пересечения объекта диаграммой, достаточно принять две отраженные пачки от объекта и обеспечить круговой обзор за 4 сек.
Предлагаемое устройство может быть использовано в радиолокаторах дальнего обнаружения, в том числе и с антенными решетками, предназначенных для управления воздушным движением и для слежения за удаленными, в том числе и космическими объектами. При этом создается возможность уменьшить время обзора, улучшить энергетические характеристики и увеличить дальность действия в связи с увеличением количества отражений от объектов. Следовательно, обеспечивается и экономический эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2007 |
|
RU2333510C1 |
| РАДИОЛОКАТОР | 1992 |
|
RU2073883C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2005 |
|
RU2298807C2 |
| РАДИОЛОКАТОР | 2007 |
|
RU2337377C1 |
| УСТРОЙСТВО ДИСКРЕТНОГО ИЗМЕРЕНИЯ ВРЕМЕННОГО ИНТЕРВАЛА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2007742C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2004 |
|
RU2253879C1 |
| ДАТЧИК АЗИМУТАЛЬНЫХ МЕТОК | 1998 |
|
RU2186406C2 |
| РАДИОЛОКАТОР | 2008 |
|
RU2402039C2 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2460084C1 |
| РАДИОЛОКАТОР | 1993 |
|
RU2073881C1 |

Устройство определения дальности относится к области радиолокационной техники и может быть использовано в радиолокаторах, осуществляющих поиск и слежение за воздушными и космическими объектами. Достигаемый технический результат - устранение появления ложных дальностей. Устройство определения дальности состоит из синхронизатора, счетчика, двух дешифраторов, передающего устройства, приемного устройства, двух инверторов, пяти элементов совпадения, трех линий задержки и преобразователя дальности, а также линии задержки, равной времени следования пачки импульсов. 2 ил.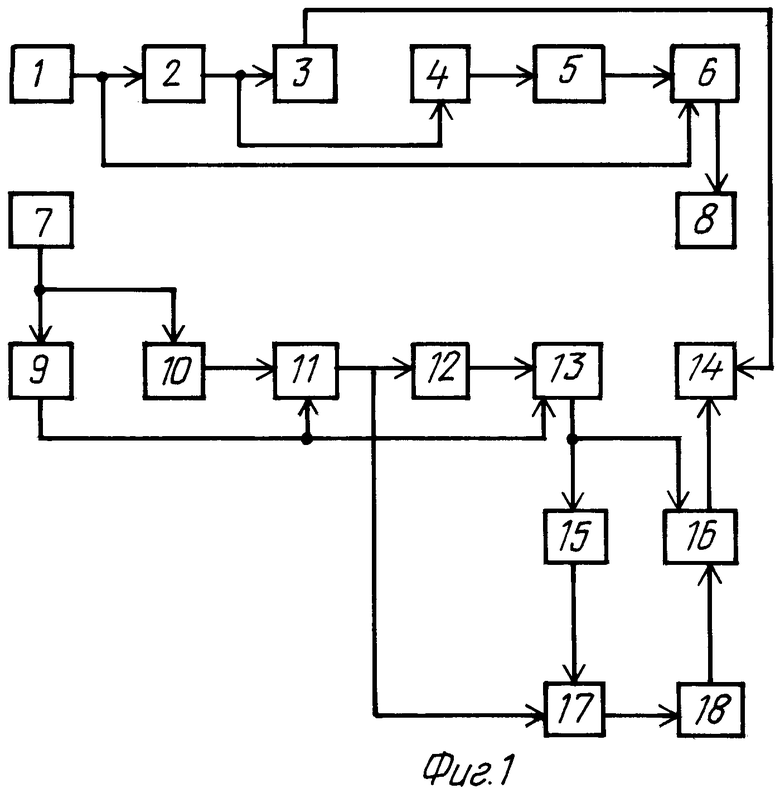
Устройство определения дальности, состоящее из синхронизатора, счетчика, дешифратора, передающего устройства, приемного устройства, двух инверторов, четырех элементов совпадения, трех линий задержек и преобразователя дальности, где выход синхронизатора соединен с первым входом первого элемента совпадения, выход и второй вход которого соответственно соединены с входом передающего устройства и с выходом первого инвертора, к тому же выход синхронизатора так же соединен через счетчик, первый дешифратор с первым входом преобразователя дальности, имеющего второй вход, соединенный с выходом четвертого элемента совпадения, а выход приемного устройства соединен через первую линию задержки с первым входом второго элемента совпадения и через второй инвертор со вторыми входами второго и третьего элементов совпадения, отличающееся тем, что вводится линия задержки, равная времени следования пачки импульсов, пятый элемент совпадения и второй дешифратор, при этом выход второго элемента совпадения соединен с первым входом пятого элемента совпадения, второй вход которого соединен через линию задержки, равную времени следования пачки импульсов, с первым входом четвертого элемента совпадения и выходом третьего элемента совпадения, первый вход которого через вторую линию задержки соединен с первым входом пятого элемента совпадения, имеющего выход, соединенный через третью линию задержки с вторым входом четвертого элемента совпадения, к тому же выход счетчика соединен через второй дешифратор с входом первого инвертора.
| РАДИОЛОКАТОР | 1992 |
|
RU2073883C1 |
| SU 1398624 A1, 10.01.1999 | |||
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1997 |
|
RU2115139C1 |
| US 5504490 A, 02.04.1996 | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| US 4320397, 16.03.1982. | |||

