Изобретение относится к области радиолокационной техники и может быть использовано в системах поиска и слежения за воздушными и космическими объектами.
Известно устройство определения дальности, входящее в состав радиолокатора в патенте №2073883, автор Часовской А.А., 1997 г. В нем с помощью передающего устройства осуществляется излучение пачек импульсов, следующих с увеличенной частотой. Период их следования равен максимальной задержке отраженного сигнала. Дальность определяется в преобразователе дальности как временное рассогласование между интервалами пачек излучаемых передающим устройством и принимаемых приемным устройством. Однако при увеличенной частоте излучения зондирующих импульсов отраженные сигналы могут накладываться друг на друга, что создает неоднозначность определения дальности.
Известно устройство определения дальности, изложенное в патенте автора №2208813, опубликованное в бюл. №20 от 20.07.2003 г. Принцип его работы заключается в следующем. Синхронизатор формирует импульсы, следующие с увеличенной частотой, превышающей частоту излучения известных радиолокаторов. Счетчик считает определенное количество этих импульсов и далее самостоятельно устанавливается в исходное состояние. В момент счета последнего импульса срабатывает первый дешифратор и выдает импульс начала отсчета дальности в преобразователь дальности. Второй же дешифратор срабатывает в момент счета, например, последних двух импульсов и выдает через инвертор запрет элементу совпадения на прохождение импульсов с синхронизатора на вход передающего устройства, который формирует и излучает следующие друг за другом пачки импульсов. Приемное устройство осуществляет преобразование электромагнитной энергии в электрические сигналы и выделение сигналов от цели. Далее с помощью инвертора, последовательно соединенных линий задержек и элементов совпадения определяется интервал равный, например, двум интервалам между импульсами внутри интервала между пачками, и выдается в момент фиксации этого интервала импульс в преобразователь дальности, определяющий дальности по временному рассогласованию между импульсом с первого дешифратора и вышеупомянутым импульсом. Однако при наложении друг на друга отраженных сигналов возникает неоднозначность определения дальности.
С помощью предлагаемого устройства уменьшается неоднозначность определения дальности. Достигается это введением пятой и шестой линии задержки, шестого и седьмого элемента совпадения и элемента ИЛИ, при этом выход приемного устройства соединен со вторым входом седьмого элемента совпадения и через пятую линию задержки соединен с первым входом шестого элемента совпадения, имеющего выход и второй вход, соединенные соответственно со вторым входом элемента ИЛИ и с выходом второго инвертора, соединенного также через шестую линию задержки с первым входом вышеупомянутого седьмого элемента совпадения, выход которого соединен с первым входом элемента ИЛИ, имеющего выход, соединенный с входом первой линии задержки.
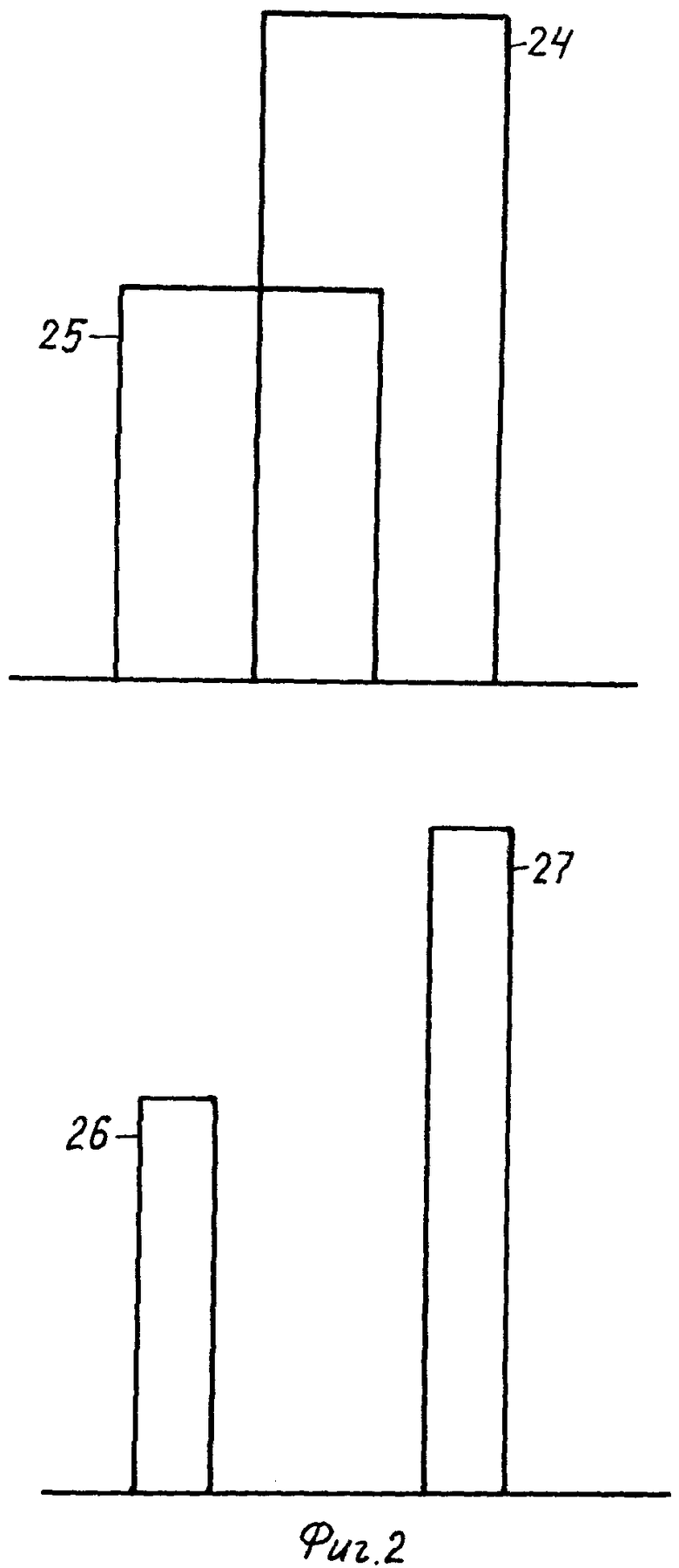
На фиг.1 и в тексте приняты следующие обозначения:
1 - синхронизатор;
2 - счетчик;
3, 4 - дешифраторы;
5 - инвертор;
6 - приемное устройство;
7 - передающее устройство;
8 - элемент совпадения;
9 - инвертор;
10, 11 - линии задержки;
12 - элемент совпадения;
13 - линия задержки;
14 - элемент совпадения;
15 - линия задержки;
16 - элемент совпадения;
17 -элемент ИЛИ;
18 - элемент совпадения;
19 - преобразователь дальности;
20 - линия задержки, равная времени следования пачки импульсов;
21,22 - элементы совпадения;
23 - линия задержки,
при этом выход синхронизатора 1 соединен с первым входом элемента совпадения 8, выход и второй вход которого соответственно соединены с входом передающего устройства 7 и через инвертор 5, дешифратор 4, счетчик 2 с вышеупомянутым выходом синхронизатора 1, к тому же выход счетчика 2 соединен через дешифратор 3 с первым входом преобразователя дальности 19, имеющего второй вход, соединенный с выходом элемента совпадения 21, имеющего первый и второй входы, соответственно соединенные с выходом элемента совпадения 18, а также через линию задержки 20 с вторым входом элемента совпадения 22, и через линию задержки 23 с выходом элемента совпадения 22, имеющего первый вход, соединенный через линию задержки 15 с первым входом элемента совпадения 18 и соединенный с выходом элемента совпадения 12, первый и второй входы которого соответственно соединены: с выходом линии задержки 11 и со вторым входом элемента совпадения 18, а также через инвертор 9 с выходом приемного устройства 6, соединенного также со вторым входом элемента совпадения 16 и через линию задержки 10 с первым входом элемента совпадения 14, имеющего выход и второй вход, соединенные соответственно со вторым входом элемента ИЛИ 17 и с выходом инвертора 9, соединенного также через линию задержки 13 с первым входом элемента совпадения 16, выход которого соединен с первым входом элемента ИЛИ 17, имеющего выход, соединенный с входом линии задержки 11.
Работа устройства осуществляется следующим образом.
Синхронизатор 1 формирует импульсы, следующие с увеличенной частотой следования, превышающей частоту излучения известных радиолокаторов. Счетчик 2 считает определенное количество этих импульсов и далее самостоятельно устанавливается в исходное состояние. В момент счета последнего импульса срабатывает дешифратор 3 и выдает импульс начала отсчета дальности в преобразователь дальности 19. Дешифратор 4 срабатывает в момент счета, например, последних двух импульсов и выдает через инвертор 5 запрет первому элементу совпадения 8 на прохождение импульсов с синхронизатора 1 на вход передающего устройства 7, который формирует и излучает следующие друг за другом пачки импульсов. Приемное устройство 6 осуществляет преобразование электромагнитной энергии в электрические сигналы. Далее осуществляется выделение передней и задней частей сигнала, который может иметь и ступенчатую форму, например, при наложении двух сигналов друг на друга от двух объектов, расположенных на разных дальностях.
Пример наличия такого сигнала представлен на фиг.2, где представлены следующие обозначения:
24 - сигнал от первого объекта;
25 - сигнал от второго объекта;
26 - задняя часть сигнала от второго объекта;
27 - передняя часть сигнала от первого объекта.
Благодаря выделению этих сигналов происходит определение дальностей для каждого из двух объектов, расположенных на разных дальностях но сигналы, от которых наложены друг на друга. Таким образом, устраняется неоднозначность определения дальности. Для выделения передней части сигнала, сигнал с приемника 6 поступает через инвертор 9, шестую линию задержки 13 на первый вход седьмого элемента совпадения 16, на второй вход которого поступает сигнал с приемника 6. Величина шестой линии задержки 13 равна длительности импульса, поступающего с выхода элемента совпадения 16 на первый вход элемента ИЛИ 17. При выделении задней части сигнала, сигнал с приемника 6 поступает через пятую линию задержки 10 на первый вход шестого элемента совпадения 14, имеющего второй вход, соединенный с выходом вышеупомянутого инвертора 9. Величина пятой линии задержки 10 равна длительности импульса, поступающего с выхода шестого элемента совпадения 14 на второй вход элемента ИЛИ 17. Таким образом, с выхода элемента ИЛИ 17 последовательно поступают два импульса, следующие друг за другом. В момент отсутствия очередного импульса с элемента ИЛИ 17 сработает второй элемент совпадения 12, на первый вход которого подается задержанный первой линией задержки 11 импульс, а второй соединен через инвертор 9 с выходом приемника 6. Величина первой линии задержки 11, а также второй линией задержек 15 равна периоду следования импульсов в пачке. Поэтому в случае отсутствия второго импульса на выходе второго элемента совпадения 12 будет иметь место положительный сигнал, который через вторую линию задержки 15 поступает на первый вход третьего элемента совпадения 18, у которого второй вход также соединен через инвертор 9 с выходом приемника 6. Следовательно, третий элемент совпадения 18 сработает при повторном отсутствии импульса, что имеет место при отсутствии двух следующих друг за другом импульсов с интервалом, равным периоду их следования. С выхода третьего элемента совпадения 18 импульс задерживается с помощью третьей линии задержки, равной времени следования пачки 20 и поступает на второй вход четвертого элемента совпадения 22, который работает только в случае поступления на первый вход импульса с выхода второго элемента совпадения 12 и выдаст импульс, далее следующий через четвертую линию задержки 23 на второй вход пятого элемента совпадения 21. Следовательно, элемент совпадения 21 работает при отсутствии двух импульсов между первой и второй пачками, что исключает ложное срабатывание и выдает импульс окончания отсчета в преобразователь дальности 19. Преобразователь дальности определяет временное рассогласование между запускающим импульсом с дешифратора 3 и импульсом с выхода пятого элемента совпадения 21. Также, как и в главном аналоге, дальность характеризуется величиной временного рассогласования между второй точкой интервала после излучения пачки импульсов, облучающих объект и точкой «d» после прихода и обработки второй отраженной пачки. При этом разность между длительностью импульса с приемника 6 и длительностью укороченного импульса с выхода элемента ИЛИ 17, после обучения точечного воздушного или космического объекта, имеет постоянное значение, что не влияет на уменьшенные точности определения дальности. Пример исполнения преобразователя дальности представлен, например, в книге Васин В.В, Степанов Б.Н. «Справочник-задачник по радиолокации», 1977, стр.214.
На фиг.3 показано временное положение трех пачек импульсов. Точкам а, в, с и d соответствует наличие импульсов соответственно на выходах элементов совпадения: 12, 18, 22, 21. Таким образом, первый отсчет дальности происходит после прихода второй пачки. Пусть предлагаемое устройство осуществляет излучение импульсов длительностью 10 мкс в количестве 20 импульсов с интервалами между пачками, равными трем периодам следования импульсов. Тогда при максимальной дальности действия 1000 км интервал между импульсами составит 280 мкс, а интервал между пачками +7 мс.
Предлагаемое устройство может быть использовано в радиолокаторах поиска и сопровождения целей. Благодаря уменьшению неоднозначности определения дальности увеличивается также и разрешающая способность по дальности и увеличивается количество обнаруженных объектов за время одного обзора.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2000 |
|
RU2208813C2 |
| РАДИОЛОКАТОР | 1992 |
|
RU2073883C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2005 |
|
RU2298807C2 |
| РАДИОЛОКАТОР | 2007 |
|
RU2337377C1 |
| УСТРОЙСТВО ДИСКРЕТНОГО ИЗМЕРЕНИЯ ВРЕМЕННОГО ИНТЕРВАЛА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2007742C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2004 |
|
RU2253879C1 |
| РАДИОЛОКАТОР | 2008 |
|
RU2402039C2 |
| УСТРОЙСТВО ДИСКРЕТНОГО ИЗМЕРЕНИЯ ВРЕМЕНИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1994 |
|
RU2084918C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2012 |
|
RU2479851C2 |
| ДАТЧИК АЗИМУТАЛЬНЫХ МЕТОК | 1998 |
|
RU2186406C2 |

Изобретение может быть использовано в системах поиска и слежения за воздушными и космическими объектами. Заявленное устройство определения дальности содержит определенным образом выполненные и соединенные между собой синхронизатор, счетчик, два дешифратора, два инвертора, семь элементов совпадения, шесть линий задержек, передающее устройство, приемное устройство, преобразователь дальности, элемент ИЛИ. Достигаемым техническим результатом является уменьшение неоднозначности определения дальности. 3 ил.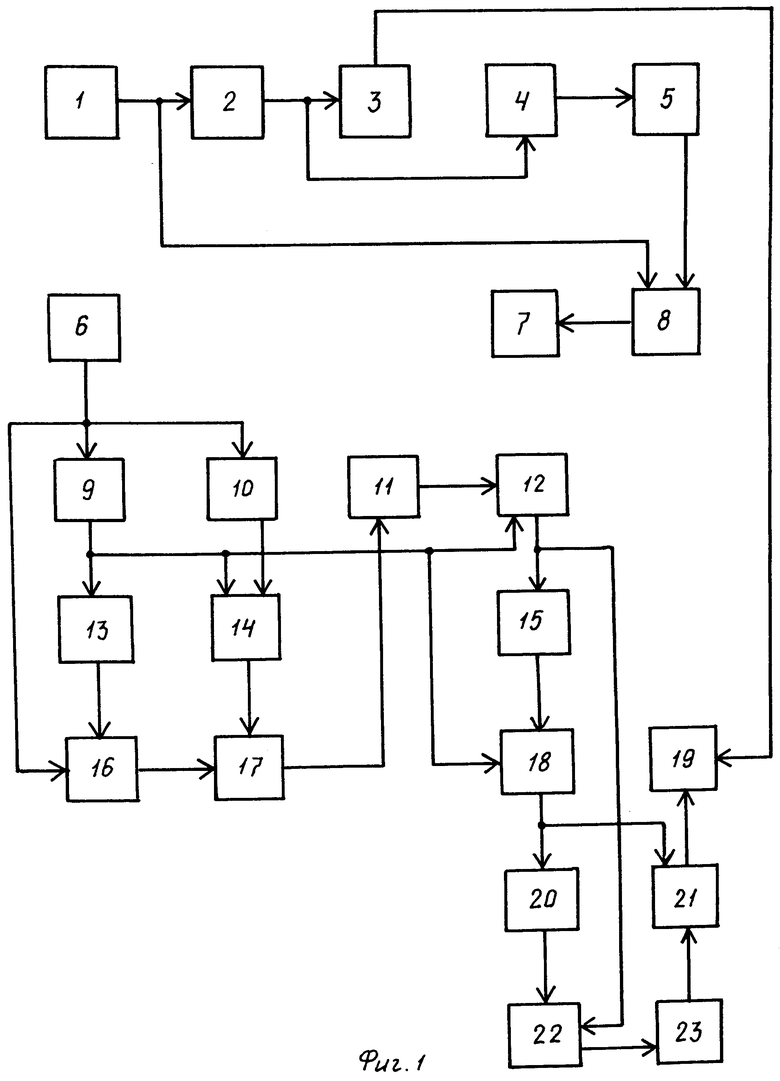
Устройство определения дальности, состоящее из синхронизатора, счетчика, двух дешифраторов, двух инверторов, пяти элементов совпадения, четырех линий задержек, передающего устройства, приемного устройства и преобразователя дальности, причем выход синхронизатора соединен с первым входом первого элемента совпадения, а также через счетчик, второй дешифратор и инвертор - с вторым входом первого элемента совпадения, выход которого соединен с входом передающего устройства, выход счетчика, кроме того, через первый дешифратор соединен с первым входом преобразователя дальности, второй вход которого соединен с выходом пятого элемента совпадения, при этом преобразователь дальности предназначен для определения дальности по временному рассогласованию между запускающим импульсом с первого дешифратора и импульсом с выхода пятого элемента совпадения, первый вход которого соединен с выходом третьего элемента совпадения, выход которого через третью линию задержки соединен с вторым входом четвертого элемента совпадения, выход которого через четвертую линию задержки соединен с вторым входом пятого элемента совпадения, первый вход четвертого элемента совпадения соединен с выходом второго элемента совпадения, выход которого, кроме того, через вторую линию задержки соединен с первым входом третьего элемента совпадения, первый и второй входы второго элемента совпадения соединены соответственно с выходом первой линии задержки и через второй инвертор с выходом приемного устройства, второй вход второго элемента совпадения также соединен с вторым входом третьего элемента совпадения, отличающееся тем, что введены пятая и шестая линии задержки, шестой и седьмой элементы совпадения и элемент ИЛИ, при этом выход приемного устройства соединен с вторым входом седьмого элемента совпадения и через пятую линию задержки соединен с первым входом шестого элемента совпадения, выход и второй вход которого соединены соответственно с вторым входом элемента ИЛИ и с выходом второго инвертора, соединенного также через шестую линию задержки с первым входом седьмого элемента совпадения, выход которого соединен с первым входом элемента ИЛИ, выход которого соединен с входом первой линии задержки.
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2000 |
|
RU2208813C2 |
| УСТРОЙСТВО ДИСКРЕТНОГО ИЗМЕРЕНИЯ ВРЕМЕННОГО ИНТЕРВАЛА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2007742C1 |
| РАДИОДАЛЬНОМЕР | 1999 |
|
RU2152052C1 |
| US 7095364 D1, 22.08.2006 | |||
| US 6111536 А, 29.08.2000 | |||
| US 4905009 А, 27.02.1990. | |||

