Изобретение относится к области радиолокации и может быть использовано в системах поиска и сопровождения воздушных и космических объектов в процессе обзора пространства.
Известен радиолокатор, описанный в книге «Радиотехнические системы» Казаринов Ю.М. - М.: Высшая школа, 1990 г. стр.252-254. В нем осуществляется сканирование луча передающего устройства. Отраженные сигналы поступают в пеленгационное приемное устройство, которое определяет направление моноимпульсным методом. Однако устройство не способно уменьшить время обзора.
Известен радиолокатор, изложенный в патенте №2161807, автор Часовской А.А. от 10.01.2001 г., бюл. №1. В нем уменьшается время обзора. Принцип его работы заключается в следующем.
С помощью сканирующего передающего устройства осуществляется перемещение диаграммы направленности по одним и тем же направлениям на величину ее ширины и излучение импульса после окончания каждого перемещения по команде с синхронизатора. Для обеспечения полного обзора пространства фаза перемещения луча периодически меняется. Частота следования зондирующих импульсов увеличена и не зависит от времени запаздывания отраженного сигнала. Направление определяется с помощью пеленгационного приемного устройства моноимпульсным методом. Ширина зоны пересечения двух диаграмм пеленгационного устройства может превышать ширину диаграммы направленности передающего устройства. Направление отображается на индикаторе. Сканирующее передающее устройство выдает код временного положения луча в преобразователь временного положения луча в направление, с выхода которого код проходит через блок элементов совпадения по команде с синхронизатора, в виде адреса и признака записи в оперативное запоминающее устройство для записи кода, характеризующего текущее время с блока счета длительности интервала, который представляет из себя блок счета времени. Адрес для считывания, являющийся в то же время и признаком считывания, в оперативное запоминающее устройство поступает в виде направления с пеленгационного приемного устройства, и когда направление с этого устройства совпадет с ранее поступившим направлением луча со сканирующего передающего устройства, в оперативном запоминающем устройстве произойдет считывание запомненной информации времени в вычитатель. На другой вход вычитателя поступает текущее время с блока счета времени. Разность на выходе вычитателя характеризует дальность. При наличии признака отрицательной разности сложение кодов осуществляется в сумматоре. Дальность отображается на индикаторе на направлении, поступающем с пеленгационного приемного устройства. Однако из-за возникающих несовпадений направлений с пеленгационного приемного устройства и направлений со сканирующего передающего устройства, и из-за погрешностей обработки при определении разности счета времени может иметь место неоднозначное определение дальности.
С помощью предлагаемого устройства уменьшается неоднозначность определения дальности. Достигается это введением блока из двух дешифраторов фаз, триггера, постоянного запоминающего устройства, одноадресного постоянного запоминающего устройства, второго вычитателя, инвертора и блока элементов И-ИЛИ, при этом группа выходов блока элементов совпадения соединена с группой входов блока из двух дешифраторов фаз, первый и второй выходы которого соединены через триггер с первым и вторым входом постоянного запоминающего устройства, имеющего группу выходов, соединенную с третьей группой входов оперативного запоминающего устройства, группа выходов которого соединена с первой группой входов второго вычитателя, имеющего группу выходов и вторую группу входов, соответственно соединенных с первой группой входов сумматора и с группой выходов одноадресного постоянного запоминающего устройства, вход которого соединен с выходом первого вычитателя, соединенного также с первым входом блока элементов И-ИЛИ, и через инвертор с вторым входом этого блока, имеющего группу выходов, соединенную с второй группой входов индикатора и первую и вторую группы входов, соответственно соединенные с группами выходов вышеупомянутых первого вычитателя и сумматора, имеющего вторую группу входов, соединенную с группой выходов блока счета времени.
На чертеже и в тексте приняты следующие обозначения:
1 - синхронизатор;
2 - сканирующее передающее устройство;
3 - пеленгационное приемное устройство;
4 - преобразователь временного положения луча в направление;
5 - триггер;
6 - постоянное запоминающее устройство;
7 - блок элементов совпадения;
8 - блок из двух дешифраторов фаз;
9 - блок счета времени;
10 - оперативное запоминающее устройство;
11 - первый вычитатель;
12 - одноадресное постоянное запоминающее устройство;
13 - сумматор;
14 - второй вычитатель;
15 - блок элементов И-ИЛИ;
16 - инвертор;
17 - индикатор,
при этом выход синхронизатора 1 соединен с входом сканирующего передающего устройства 2 и с входом блока элементов совпадения 7, имеющего первую группу входов и группу выходов соответственно соединенные: через преобразователь временного положения луча в направление 4 с группой выходов сканирующего передающего устройства 2 и с первой группой входов оперативного запоминающего устройства 10, вторая группа входов и группа выходов которого соответственно соединены: с группой выходов блока счета времени 9 и с первой группой входов первого вычитателя 11, имеющего вторую группу входов, соединенную с вышеупомянутой группой выходов блока счета времени 9, соединенной также с второй группой входов сумматора 13, имеющего первую группу входов, соединенную с группой выходов второго вычитателя 14, первая и вторая группы входов которого соответственно соединены с вышеупомянутой группой выходов оперативного запоминающего устройства 10 и с группой выходов одноадресного постоянного запоминающего устройства 12, имеющего вход, соединенный с выходом первого вычитателя 11, соединенным также с первым входом блока элементов И-ИЛИ 15, и соединенный через инвертор 16 со вторым входом этого блока 15, имеющего первую и вторую группы входов и группу выходов соответственно соединенные: с группой выходов первого вычитателя 11, с группой выходов сумматора 13, и с второй группой входов индикатора 17, имеющего первую группу входов, соединенную с группой выходов пеленгационного приемного устройства 3, соединенной также с группой входов постоянного запоминающего устройства 6, группа выходов которого соединена с третьей группой входов оперативного запоминающего устройства 10, а первый и второй входы через триггер 5 соединены с первым и вторым выходами блока из двух дешифраторов фаз 8, имеющего группу входов, соединенную с вышеупомянутой группой выходов блока элементов совпадения 7.
Работа устройства осуществляется следующим образом.
С помощью сканирующего передающего устройства 2 осуществляется последовательное перемещение диаграммы направленности и излучение зондирующего импульса после перемещения луча на величину собственной ширины. Частота следования импульсов увеличена и не зависит от времени запаздывания отраженного сигнала. Для обеспечения полного обзора пространства фаза перемещения луча периодически меняется через один и тот же промежуток времени. Пример изменения режима поиска целей, в том числе изменения фазы перемещений луча представлен в вышеупомянутом источнике «Радиотехнические системы» Ю.М.Казаринов, стр.253. Отраженные сигналы срабатывают в пересекающихся приемных каналах пеленгационного приемного устройства 3, определяющего направление моноимпульсным методом. Ширина зоны двух пересекающих приемных диаграмм направленности может превышать ширину узкого передающего луча. При этом смещение пересекающихся приемных диаграмм может осуществляться электрическим путем синхронно с передающим лучом, например, так как показано в вышеупомянутой книге на стр.412. Сканирующее передающее устройство 2 выдает код временного положения луча относительно начала сканирования в преобразователь временного положения луча в направление 4, который преобразует временное положение луча в направление относительного начала сканирования. Исполнение преобразователя 4 может быть аналогично постоянному запоминающему устройству, где для каждого значения временного положения зашивается соответствующее направление. В момент выдачи синхроимпульса с синхронизатора 1 параллельный код, характеризующий текущее положение луча, проходит через блок элементов совпадения 7 в виде адреса и признака записи в оперативное запоминающее устройство 10 для записи кода, характеризующего время с блока счета времени 9, который устанавливается самостоятельно в исходное состояние после определенного количества времени. Исполнение блока 9 аналогично преобразователю дальности, представленного в книге Васин и др. «Справочник-задачник по радиолокации, 1977, стр.214. Адрес для считывания, являющийся в то же время и признаком считывания, поступает в оперативное запоминающее устройство 10 с постоянного запоминающего устройства 6, куда также поступают направления с пеленгационного приемного устройства 3 и на первый и второй входы признаки фазы луча с первого и второго выхода триггера 5, на первый и второй входы которого поступают соответствующие сигналы с дешифраторов блока из двух дешифраторов фаз 8. Каждый из дешифраторов фиксирует определенный код направления с блока элементов совпадения 7 в зависимости от фазы передающего луча, так как после изменения фазы изменяются и направления скачкообразных перемещений луча. Для преобразования направлений, поступающих с пеленгационного приемного устройства 3 в направления, аналогичные направлениям сканирующего передающего устройства 2, для каждой из групп направлений с пеленгационного приемного устройства 6, ближе расположенных к соответствующим направлениям сканирующего передающего устройства 2, зашиваются коды этих направлений передающего луча для каждой из двух фаз в постоянное запоминающее устройство 6, который и выдает их в оперативное запоминающее устройство 10, и когда направление с постоянного запоминающего устройства 6 совпадет с ранее поступившим направлением луча со сканирующего передающего устройства 2, в оперативном запоминающем устройстве 10 произойдет считывание запомненной информации о времени в первый вычитатель 11. На другой вход вычитателя поступает текущее время с блока счета времени 9 и положительная разность будет характеризовать дальность до объекта в том случае, если текущая величина времени будет превышать считанную. Если же считанная величина времени будет превышать текущую, это значит, что значение времени с блока счета времени 9 поступило до установки этого блока в нуль. В этом случае отрицательная разность с выхода первого вычитателя 11 не будет характеризовать дальность и выдаст признак отрицательной разности в одноадресное постоянное запоминающее устройство 12, в котором зашита информация о максимальном времени, которое могло бы быть подсчитано с помощью блока счета времени 9 до установки его в нуль. Во втором вычитателе 14 это максимальное время вычитается из запомненного в оперативном запоминающем устройстве 10 и разность поступает в сумматор, где складывает с текущим временем, поступающим с блока счета времени 9. В результате сумма, характеризующая дальность, проходит через блок элементов И-ИЛИ 15 при наличии признака отрицательной разности с вычитателя 11. При отсутствии же признака отрицательной разности, положительная разность с первого вычитателя 11 проходит через вышеупомянутый блок элементов И-ИЛИ 15, при наличии положительного сигнала с инвертора 16, фиксирующего отсутствие признака отрицательной разности. Значение дальности с выхода, блок элементов И-ИЛИ 15 поступает в индикатор 17 для отображения на направлении с пеленгационного приемного устройства 3.
Приведем пример конкретного исполнения.
Пусть луч совершает круговой обзор пространства с помощью фазированной антенной решетки. Ширина луча по азимуту 1°, а по углу места 60°. Частота излучения зондирующих импульсов 5 кГц. После каждого скачка луча излучается импульс. Тогда время кругового обзора составит 72 мс. Синхронно с передающим лучом сканирует также с помощью круговой решетки зона пересечения приемных диаграмм шириной 30°. При этом обеспечивается разрешающая способность по направлению 20 минут при максимальной дальности обнаружения 1000 км. Возможны другие варианты конкретных применений.
В предлагаемом устройстве, при уменьшении неоднозначности определения дальности, при ускоренном обзоре с увеличенной частотой следования импульсов, уменьшается вероятность пропуска целей при сокращении узлов обработки.
Благодаря увеличенной частоте зондирующих импульсов можно обеспечить накопление сигналов для увеличения дальности обнаружения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАТОР | 1999 |
|
RU2161807C2 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2390037C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2010 |
|
RU2447456C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2012 |
|
RU2479850C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2005 |
|
RU2279690C1 |
| РАДИОЛОКАТОР | 2008 |
|
RU2402039C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2004 |
|
RU2253879C1 |
| РАДИОЛОКАТОР | 1993 |
|
RU2088950C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2000 |
|
RU2193216C2 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2460084C1 |
Изобретение относится к радиолокации и может быть использовано для обзора пространства. Достигаемым техническим результатом изобретения является уменьшение неоднозначности при определении дальности до объекта. Указанный результат достигается за счет того, что заявленный радиолокатор содержит определенным образом соединенные между собой - сканирующее передающее устройство, пеленгационное приемное устройство, преобразователь временного положения луча в направление, блок элементов совпадения, блок счета времени, два вычитателя, оперативное запоминающее устройство, сумматор, индикатор, синхронизатор, блок из двух дешифраторов фаз, триггер, постоянное запоминающее устройство, одноадресное постоянное запоминающее устройство, инвертор и блок элементов И-ИЛИ. 1 ил.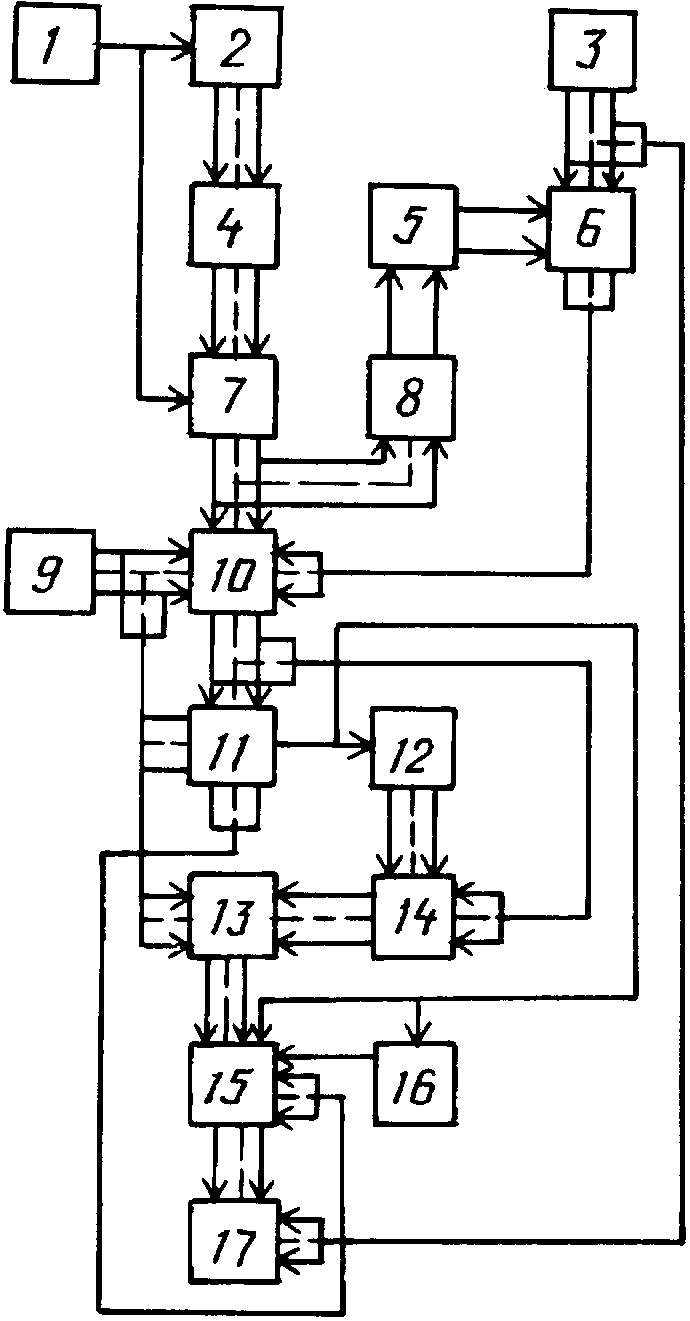
Радиолокатор, состоящий из синхронизатора, сканирующего передающего устройства, пеленгационного приемного устройства, преобразователя временного положения луча в направление, блока элементов совпадания, блока счета времени, первого вычитателя с признаком, оперативного запоминающего устройства, сумматора и индикатора, где выход синхронизатора соединен с входом сканирующего передающего устройства и с входом блока элементов совпадения, имеющего первую группу входов и группу выходов, соответственно соединенные через преобразователь временного положения луча в направление с группой выходов сканирующего передающего устройства и с первой группой входов оперативного запоминающего устройства, вторая группа входов и группа выходов которого соответственно соединены с группой выходов блока счета времени и с первой группой входов первого вычитателя, имеющего вторую группу входов, соединенную с вышеупомянутой группой выходов блока счета времени, а группа выходов пеленгационного приемного устройства соединена с первой группой входов индикатора, отличающийся тем, что введены блок из двух дешифраторов фаз, триггер, постоянное запоминающее устройство, одноадресное постоянное запоминающее устройство, второй вычитатель, инвертор и блок элементов И-ИЛИ, при этом группа выходов блока элементов совпадения соединена с группой входов блока из двух дешифраторов фаз, первый и второй выходы которого соединены через триггер с первым и вторым входами постоянного запоминающего устройства, имеющего группу выходов, соединенную с третьей группой входов оперативного запоминающего устройства, группа выходов которого соединена с первой группой входов второго вычитателя, имеющего группу выходов и вторую группу входов, соответственно соединенных с первой группой входов сумматора и с группой выходов одноадресного постоянного запоминающего устройства, вход которого соединен с выходом первого вычитателя, соединенного также с первым входом блока элементов И-ИЛИ, и через инвертор с вторым входом этого блока, имеющего группу выходов, соединенную с второй группой входов индикатора, и первую и вторую группы входов соответственно соединенные с группами выходов вышеупомянутых первого вычитателя и сумматора, имеющего вторую группу входов, соединенную с группой выходов блока счета времени.
| РАДИОЛОКАТОР | 1999 |
|
RU2161807C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА ДЛЯ ПОСТРОЕНИЯ МНОГОФУНКЦИОНАЛЬНОГО РАДИОЛОКАТОРА | 2004 |
|
RU2274875C2 |
| РАДИОЛОКАТОР | 2000 |
|
RU2178185C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1995 |
|
RU2096801C1 |
| US 4292635 A, 29.09.1981 | |||
| EP 1026520 A2, 09.08.2000 | |||
| Сошник пневматической сеялки | 1973 |
|
SU490423A1 |

