Изобретение относится к системам управления и защиты ядерных реакторов и может быть использовано в системах контроля положения регулирующих органов.
Известно "Устройство для контроля крутящего момента на валу асинхронного электродвигателя" (RU 2269752, МПК G01L 3/10), содержащее трансформатор напряжения и трансформатор тока, включенные в статорную цепь электродвигателя, и измерительную схему с пороговым устройством, отличающееся тем, что в нем в измерительную схему введены источник постоянного напряжения, два согласующих устройства, мост постоянного тока, в первое и третье противоположные плечи которого включены первый и второй образцовые резисторы соответственно, а во второе и четвертые противоположные плечи - опторезисторы первой и второй резисторных оптопар соответственно. Недостатком аналога является то, что аналоговая измерительная схема не имеет современных вычислительных возможностей и средств визуализации измерения.
Прототипом заявленного изобретения является "Механизм управления ядерного реактора с датчиком пошагового контроля положения органа регулирования" [Патент RU 2073917 С1, патентообладатель ОКБ «Гидропресс», МПК 6 G21C 7/36, G21C 7/36], содержащий жестко соединенный с органом регулирования шток, шунт и приводное устройство, расположенное внутри герметичного корпуса, заполненного водой первого контура, индикаторы положения шунта и обмотки электромагнитов приводного устройства, расположенные снаружи герметичного корпуса, причем герметичный корпус выполнен в виде двух концентричных соединенных в верхней части труб, соосно с которыми расположен шунт, охватывающий малую трубу, шунт установлен на верхнем конце штока, а индикаторы положения шунта размещены внутри малой трубы в зоне приводного устройства, отличающийся тем, что индикаторы положения шунта равномерно размещены вдоль оси перемещения штока и разделены немагнитными проставками, а шунт выполнен из магнитных и немагнитных проставок общей длиной, равной рабочему ходу штока, при этом каждому шагу приводного устройства соответствует одна и только одна основная кодовая комбинация положения органа регулирования, снимаемая одновременно со всех индикаторов положения шунта, получающаяся при замыкании или размыкании магнитными и немагнитными проставками шунта магнитных цепей индикаторов положения, причем длины магнитных и немагнитных проставок шунта подобрана так, что при нахождении органа регулирования между i и i+1 шагами приводного устройства промежуточные кодовые комбинации, получающиеся при этом, могут быть отнесены только либо к i, либо к i+1 шагам положения органа регулирования. Недостатком прототипа является то, что датчик пошагового контроля работает в жестких внешних условиях - в зоне высокого давления, температуры, радиации и недоступен для обслуживания во время работы реакторной установки. Современные подходы к обеспечению надежности систем управления и защиты (СУЗ) АЭС требуют резервирования функций, важных для безопасности. Необходимо также обеспечивать диагностику состояния элементов привода органа регулирования и системы его управления.
Целью настоящего изобретения является повышение надежности СУЗ АЭС за счет создания устройства (датчика) шагового контроля, способного резервировать широко используемый датчик пошагового контроля ОКБ «Гидропресс».
Задачей настоящего изобретения является создание способа и устройства шагового контроля органа регулирования ядерного реактора, которое должно размещаться вне зоны с высокими значениями внешних воздействующих факторов, и использовать имеющуюся в системе управления приводом текущую информации о токах и напряжениях в электромагнитах шаговой электрической машины (ШЭМ) как для определения шага, так и для оценки технического состояния привода.
Техническим результатом настоящего изобретения является возможность надежного контроля работы приводного устройства вследствие выявления наведенной в обмотках электромагнитов ЭДС, возникающей при перемещении исполнительного механизма внутри электромагнитов, и определение шага вверх или вниз. При этом, поскольку шаг характеризуется весьма малым изменением индуктивности катушек электромагнитов, для его выявления необходима реализация заданной последовательности действий.
Кроме того, благодаря измерению токов и напряжений реализуется проведение диагностики работоспособности отдельных узлов приводного устройства, контроль падения, сцепления и расцепления органа регулирования ядерного реактора со штоком, диагностика короткого замыкания и обрыва цепи питания электромагнита.
Изобретение поясняется следующими чертежами.
Фиг.1. Функциональная схема устройства шагового контроля органа регулирования ядерного реактора.
Фиг.2. Заданная последовательность действий, реализующая способ шагового контроля органа регулирования ядерного реактора.
Фиг.3. Осциллограммы напряжений на тянущем UТМ и запирающем СЗМ электромагнитах и их произведение.
Сущность настоящего изобретения поясняется фиг.1. Управление исполнительным механизмом 1 (ИМ) органа регулирования ядерного реактора выполняется при помощи тянущего 2, запирающего 3 и фиксирующего 4 электромагнитов от блоков управления 5. Способ шагового контроля положения и диагностика технического состояния привода органа регулирования ядерного реактора реализуется при помощи устройства шагового контроля органа регулирования ядерного реактора, состоящего из датчиков напряжения 6 и датчиков тока 7 трансформаторного типа, сигналы с которых поступают на аналого-цифровой преобразователь 8, с которого в цифровом виде на вычислительное устройство 9, состоящее из электронной схемы и микросхемы (микрочипа), в микросхему (микрочип) записана заданная последовательность действий, реализующая способ шагового контроля органа регулирования ядерного реактора (фиг.2). В качестве микросхемы (микрочипа) может использоваться специализированный микроконтроллер, например промышленный микроконтроллер семейства TMS320C2000 (Texas Instruments, США), а также общеприменяемый процессор, например, Pentium IV. В качестве вычислительного устройства может использоваться промышленная вычислительная рабочая станция либо персональный компьютер.
Способ шагового контроля органа регулирования ядерного реактора реализуется в реальном времени заданной последовательностью действий (фиг.2), которая позволяет определять факт выполнения или невыполнения шага, а также вычислять текущее положение исполнительного механизма. Упомянутая последовательность действий использует данные о зависимостях от времени напряжений и токов на электромагнитах приводов ШЭМ и сравнивает с пороговым значением произведения напряжения на тянущем UТМ и запирающем UЗМ электромагнитах (фиг.3) при отработке приводом штатной рабочей циклограммы токов.
Начало отработки приводом циклограммы шага определяется заданной последовательностью действий, реализующей способ шагового контроля органа регулирования ядерного реактора, относительно момента, когда микросхема (микрочип) устройства шагового контроля органа регулирования ядерного реактора зафиксировала (зафиксировал) превышение средним значением напряжения на тянущем электромагните пороговой величины напряжения, например 100 В. На интервале времени рабочей циклограммы, где должен выполняться шаг, производится сбор массивов усредненных величин напряжений на
тянущем UТМ(t) и запирающем UЗМ(t) электромагнитах. Затем выполняется нормирование элементов собранных массивов и вычисление массива произведений (-UHTM(t)·UНЗМ(t)), где UHTM и UНЗМ - пары нормированных значений усредненных напряжений на тянущем и запирающем электромагнитах. В качестве признака шага рассматривается превышение порогового значения хотя бы одним элементом массива величин (-UHTM(t)·UНЗМ(t)), которое является следствием наведенной ЭДС, возникающей при перемещении исполнительного механизма внутри электромагнитов. Данные о напряжении на фиксирующем электромагните используются заданной последовательностью действий для определения факта фиксации органа регулирования ядерного реактора на новом уровне. Данные о токах на тянущем, запирающем и фиксирующем электромагнитах используются для определения правильности функционирования привода. В результате реализации способа шагового контроля органа регулирования ядерного реактора на выход устройства шагового контроля органа регулирования ядерного реактора выдаются сигналы о реализации шага вверх или шага вниз (при выполнении этих шагов) или сигналы об отсутствии шага. Последовательность действий, реализующая способ шагового контроля органа регулирования ядерного реактора, приведена на фиг.2. В блоке 1 происходит ввод исходных данных, в блоке 2 - задание начального положения штанги. Переменная h характеризует положение штанги, т.е. количество шагов штанги, переменная h0 - это фактическое начальное положение штанги привода на момент включения устройства шагового контроля в работу, задаваемое управляющей программе в числе исходных данных, которое позволяет определить абсолютное положение штанги органа регулирования ядерного реактора. В блоке 3 выполняется фиксация момента начала отработки приводом циклограммы шага. Проверка циклограммы токов на соответствие диаграмме "вверх" или "вниз" по характеру усредненных напряжений UТМ(t) и UЗМ(t). В блоке 4 происходит проверка циклограмм токов на соответствие диаграмме "вверх", в блоке 5 выполняется проверка циклограмм токов на соответствие диаграмме "вниз". В блоке 6 происходит проверка на наличие признака шага вверх, в блоке 7 выполняется проверка на наличие признака шага вниз. В блоках 8 и 11 выводятся сообщения об отсутствии шага, в блоке 9 переменная h инкрементируется, в блоке 10 - декрементируется.
При работе привода в режиме «стоянки» при питании электромагнитов постоянным напряжением происходит диагностика наличия короткозамкнутых витков путем сравнения измеренного в реальном времени значения сопротивления с измеренным при изготовлении привода. При наличии напряжения на любом из электромагнитов, но при токе, равном нулю, происходит выявление обрыва цепи питания электромагнита.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 2004 |
|
RU2273896C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЯДЕРНОГО РЕАКТОРА С ДАТЧИКОМ ПОШАГОВОГО КОНТРОЛЯ ПОЛОЖЕНИЯ ОРГАНА РЕГУЛИРОВАНИЯ | 2008 |
|
RU2394290C2 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЯДЕРНОГО РЕАКТОРА С ДАТЧИКОМ ПОШАГОВОГО КОНТРОЛЯ ПОЛОЖЕНИЯ ОРГАНА РЕГУЛИРОВАНИЯ | 2001 |
|
RU2208846C2 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЯДЕРНОГО РЕАКТОРА С ДАТЧИКОМ ПОШАГОВОГО КОНТРОЛЯ ПОЛОЖЕНИЯ ОРГАНА РЕГУЛИРОВАНИЯ | 1994 |
|
RU2073917C1 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 2002 |
|
RU2237298C2 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1999 |
|
RU2157007C1 |
| Привод регулирующего органа ядерного реактора | 2002 |
|
RU2217821C1 |
| СИСТЕМА УПРАВЛЕНИЯ И КОНТРОЛЯ ПОЛОЖЕНИЯ ОРГАНОВ РЕГУЛИРОВАНИЯ ЯДЕРНОГО РЕАКТОРА | 2009 |
|
RU2412493C1 |
| Система контроля положения органа регулирования ядерного реактора | 1990 |
|
SU1806410A3 |
| Датчик определения заданного порога тока потребления | 2018 |
|
RU2678718C1 |
Изобретение относится к системам управления и защиты ядерных реакторов и может быть использовано в системах контроля положения регулирующих органов. Способ шагового контроля органа регулирования ядерного реактора включает одновременное измерение токов и напряжений силовых электромагнитов и вычисление активной мощности тягового электромагнита. Положение органа регулирования ядерного реактора определяется в виде суммы начального положения органа регулирования ядерного реактора и последующих шагов «вниз» и «вверх». Решение о наличии соответствующего шага принимается на основе сравнения соответствия фактически измеренной циклограммы токов трех электромагнитов с заданной циклограммой. Заданная циклограмма соответствует полученной от системы управления команде. Решение о наличии соответствующего шага принимается также на основе превышения порогового значения характеристической функции. Эта функция определяет фактическое наличие шага и вычисляется как произведение напряжений тянущего и запирающего электромагнитов. Изобретение позволяет повысить надежность системы управления и защиты АЭС. 2 з.п. ф-лы, 3 ил.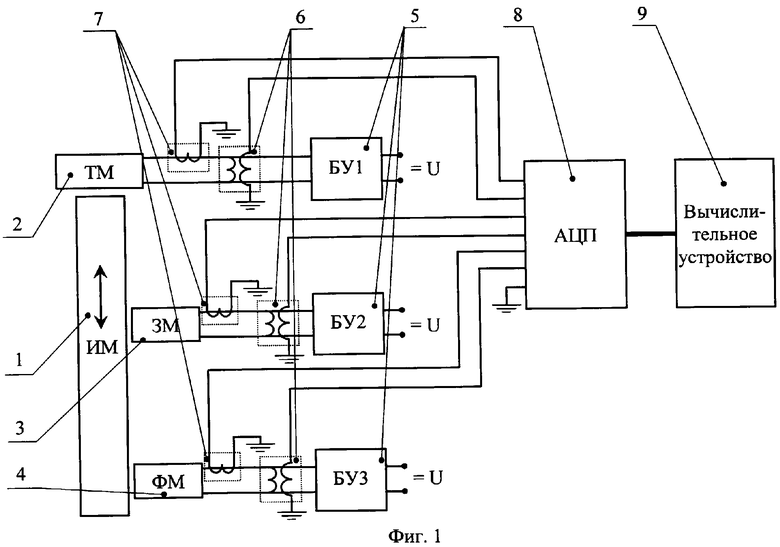
1. Способ шагового контроля органа регулирования ядерного реактора, включающий одновременное измерение токов и напряжений силовых электромагнитов, вычисление активной мощности тягового электромагнита, отличающийся тем, что положение органа регулирования ядерного реактора определяется в виде суммы начального положения органа регулирования ядерного реактора и последующих шагов «вниз» и «вверх», решение о наличии соответствующего шага принимается на основе сравнения соответствия фактически измеренной циклограммы токов трех электромагнитов с заданной циклограммой, соответствующей полученной от системы управления команды, а также превышения порогового значения характеристической функции, определяющей фактическое наличие шага, вычисляемой как произведение напряжений тянущего и запирающего электромагнитов.
2. Способ шагового контроля органа регулирования ядерного реактора по п.1, отличающийся тем, что фактор технического состояния привода оценивается по наличию короткозамкнутых витков электромагнитов.
3. Способ шагового контроля органа регулирования ядерного реактора по п.1, отличающийся тем, что фактор технического состояния привода оценивается по наличию обрыва цепи питания электромагнитов.
| МЕХАНИЗМ УПРАВЛЕНИЯ ЯДЕРНОГО РЕАКТОРА С ДАТЧИКОМ ПОШАГОВОГО КОНТРОЛЯ ПОЛОЖЕНИЯ ОРГАНА РЕГУЛИРОВАНИЯ | 1994 |
|
RU2073917C1 |
| Привод регулирующего органа ядерного реактора | 2002 |
|
RU2217821C1 |
| Способ фиксации положения исполнительного органа станка | 1958 |
|
SU126712A1 |
| US 2005286673 A1, 29.12.2005 | |||
| Способ уборки корнеклубнеплодов | 1981 |
|
SU1353349A1 |
| JP 2004112996 A, 08.04.2004. | |||

