Изобретение относится к оборудованию ядерных энергетических установок и может быть использовано в механизмах управления ядерных реакторов.
Известен привод регулирующего органа ядерного реактора, содержащий кожух, тянущий, фиксирующий и запирающий электромагниты, зубчатую штангу, подвижную и фиксирующую защелки, соединенные с якорями, тянущий якорь, связанный с полюсом запирающего электромагнита и с подвижной защелкой, несущую трубу, на которой установлен неподвижный полюс фиксирующего электромагнита и неподвижный полюс тянущего электромагнита (см. патент РФ N 2059301, 1996 г. ).
Задачей изобретения является повышение тягового усилия привода и снижение ударных нагрузок на детали привода.
Поставленная задача достигается тем, что в приводе регулирующего органа ядерного реактора, содержащего кожух, тянущий, фиксирующий и запирающий электромагниты, зубчатую штангу, подвижную и фиксирующую защелки, соединенные с якорями, тянущий якорь, связанный с полюсом запирающего электромагнита и с подвижной защелкой, несущую трубу, на которой установлен неподвижный полюс фиксирующего электромагнита и неподвижный полюс тянущего электромагнита, между подвижными полюсами тянущего, фиксирующего, запирающего электромагнитов и соответствующими нижними упорами установлены пружины, а также между подвижным полюсом тянущего электромагнита и нижним упором подвижного полюса тянущего электромагнита установлена пружина.
Сущность изобретения поясняется чертежами:
на фиг. 1 изображен привод регулирующего органа,
на фиг. 2 изображено продолжение фиг. 1,
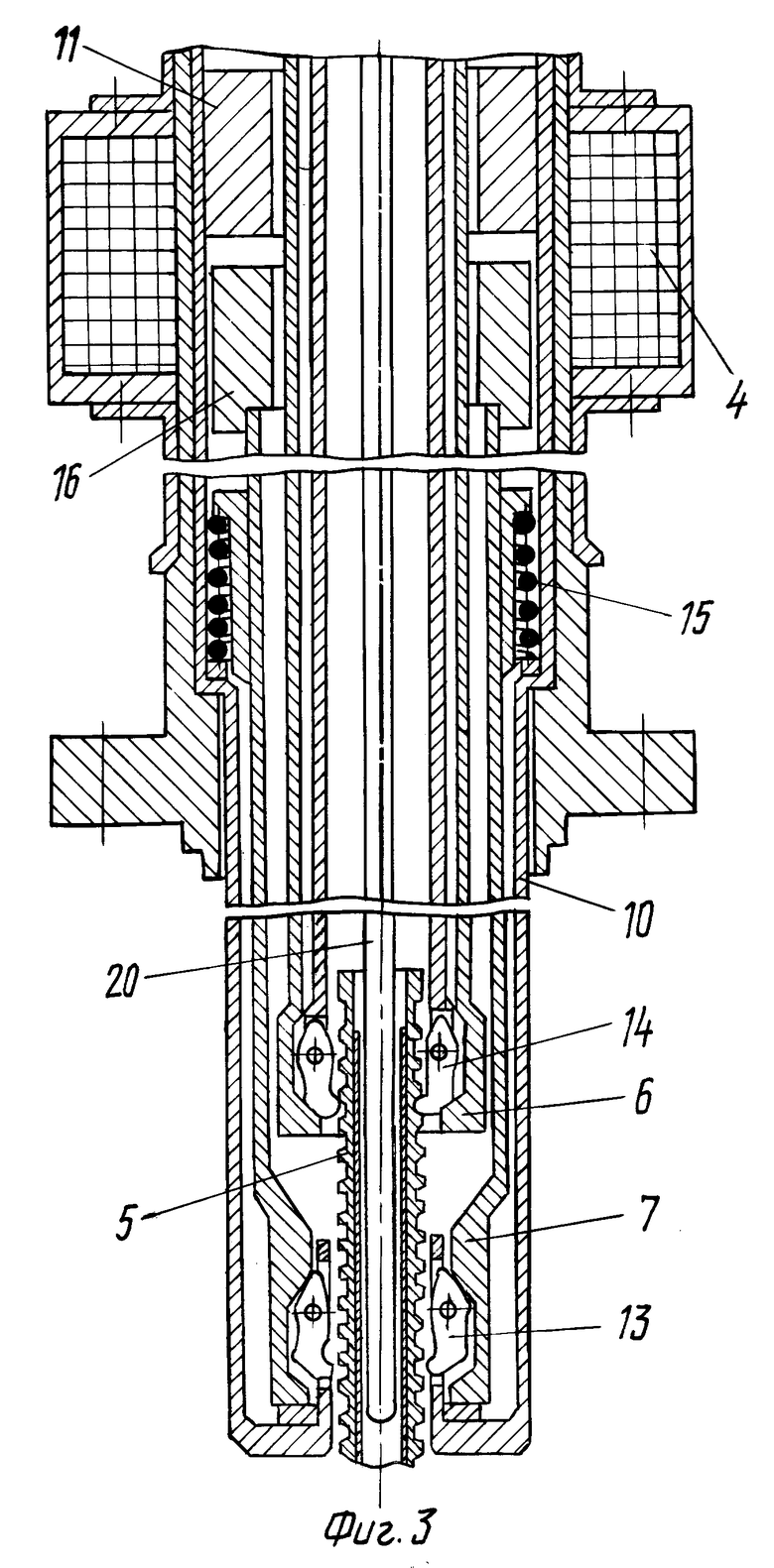
на фиг. 3 изображено продолжение фиг. 2.
Привод регулирующего органа ядерного реактора содержит кожух 1, тянущий электромагнит 2, запирающий электромагнит 3, фиксирующий электромагнит 4, зубчатую штангу 5, жестко связанную с регулирующим органом ядерного реактора, подвижную защелку 6, неподвижную защелку 7, якорь 8 (подвижный полюс тянущего электромагнита), полюс 9 запирающего электромагнита, несущую трубу 10, неподвижный полюс 11 фиксирующего электромагнита, неподвижный полюс 12 тянущего электромагнита, кулачки 13 и 14, пружину 15, подпружинивающую подвижный полюс 16 фиксирующего электромагнита, подвижный полюс 17 запирающего электромагнита, подпружиненный пружиной 18, пружину 19 для ускорения отключения запирающего электромагнита, датчик положения 20, пружину 21, подпружинивающую якорь 8 (подвижный полюс тянущего электромагнита), трубу 22, связанную с якорем 8 и подвижной защелкой 7.
Привод регулирующего органа ядерного реактора работает следующим образом.
В исходном состоянии при обесточенных электромагнитах 2,3,4 штанга 5 находится на нижнем механическом упоре. Верхний торец штанги всегда находится выше кулачков 14 подвижной защелки 6. Перемещение штанги 5 вверх или вниз происходит при поочередном включении электромагнитов 2,3,4 в определенной последовательности. Для перемещения штанги 5 вверх сначала включается питание на запирающий электромагнит 3. Подвижный полюс 17 притягивается к неподвижному полюсу 9, поднимает подвижную защелку 6, сжимает пружину 19. Пружина 18 в это время разжимается и помогает притянуть подвижный полюс 17 к неподвижному полюсу 9 при значительно меньшем токе, чем без пружины 18. По мере приближения подвижного полюса 17 к неподвижному полюсу 9 усилие, развиваемое самим электромагнитом при неизменном токе питания, возрастает, а усилие, создаваемое пружиной 18 уменьшается и подвижный полюс 17 плавно без удара притягивается к неподвижному полюсу 9. Подвижная защелка 6 нажимает на кулачки 14 и зажимает кулачками 14 штангу 5. Пружина 21 в это время сжата под действием веса подвижных частей привода (якорь 8 жестко связанный с трубой 22, полюсы 9, 17 и подвижная запирающая защелка 6), якорь 8 в нижнем положении находится на упоре 23, жестко связанном с несущей трубой 10. При включении питания на тянущий электромагнит 2 якорь 8 притягивается к полюсу 12 и поднимает подвижные части и штангу 5, к которой крепится регулирующий орган ядерного реактора (на фиг. 1,2,3 не показан). Пружина 21 в это время разжимается и помогает притягивать якорь 8 к полюсу 12 при значительно меньшем токе, чем без пружины 21. По мере приближения якоря 8 к полюсу 12 усилие, развиваемое тянущим электромагнитом 2 при неизменном токе питания возрастает, а усилие, создаваемое пружиной 21 уменьшается и якорь 8 плавно без удара подтягивает подвижные части к нижнему торцу 24 упора 23, а между полюсами 8 и 12 остается зазор, включается питание фиксирующего электромагнита 4, полюс 16 притягивается к полюсу 11 и поднимает защелку 7. Пружина 15 при обесточенном электромагните 4 поджата весом полюса 16 и защелки 7. Защелка 7 при поджатой пружине 15 опирается нижним торцем на несущую трубу 10. После включения питания электромагнита 4 пружина 15 разжимается и помогает притягивать полюс 16 к полюсу 11 при значительно меньшем токе, чем без пружины 15. По мере приближения полюса 16 к полюсу 11 усилие развиваемое электромагнитом 4 при неизменном токе питания возрастает, а усилие, создаваемое пружиной 15 уменьшается и полюс 16 плавно без удара притягивается к полюсу 11. Защелка 7 нажимает на кулачки 13 и зажимает кулачками 13 штангу 5. Питание запирающего электромагнита 3 отключается, полюс 17 отходит от полюса 9 и опускается на упор 25. Пружина 18 поддерживает полюс 17 и смягчает удар полюса 17 об упор 25. Подвижная защелка 6 отпускает кулачки 14 и они расходятся. Отключается питание тянущего электромагнита 2 и тянущий якорь 8 опускается на упор 23, сжимая пружину 21. Пружина 21 смягчает удар якоря 8 об упор 23. Вместе с якорем 8 опускается труба 22 полюс 9 и подвижная защелка 6. Так происходит подъем штанги 5 на один шаг вверх. При повторении вышеописанного цикла включений электромагнитов штанга 5 шагами будет подниматься вверх. Для изменения направления перемещения штанги 5 изменяется последовательность включения питания электромагнитов. При включенном питании фиксирующего электромагнита 4 и отключенном питании остальных электромагнитов штанга 5 удерживается неподвижной защелкой 7. Включается питание тянущего электромагнита 2. Якорь 8 притягивается к полюсу 12 и поднимает трубу 22 с кулачками 14, полюсы 9 и 17 и подвижную защелку 6. Включается питание запирающего электромагнита 3, полюс 17 притягивается к полюсу 9, защелка 6 нажимает на кулачки 14 и зажимает штангу 5. Отключается питание фиксирующего электромагнита 4, защелка 7 отпускает кулачки 13 и штангу 5. Штанга 5 удерживается подвижной защелкой 6. Отключается питание тянущего электромагнита 2, якорь 8 опускается на упор 23 и опускает подвижные части и штангу 5 на один шаг вниз. Включается питание фиксирующего электромагнита 4, штанга 5 зажимается защелкой 7 и кулачками 13. Отключается питание запирающего электромагнита 3. При повторении описанного цикла включений электромагнитов штанга будет дискретно с определенным шагом опускаться вниз. Датчик 20 в результате электромагнитного взаимодействия с шунтом внутри штанги 5 выдает сигналы о положении штанги 5 и соотвественно о положении регулирующего органа ядерного реактора, т.к. регулирующий орган жестко связан со штангой 5.
Применение пружин в предлагаемом приводе компенсирует часть веса подвижных частей привода, делает характеристики усилия электромагнитов более плавными, увеличивает тяговые характеристики привода при неизменном токе питания электромагнитов в результате получения более плавных совместных характеристик усилия пружин и электромагнитов, снижаются ударные нагрузки на детали привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 2002 |
|
RU2237298C2 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 2004 |
|
RU2273896C1 |
| Привод регулирующего органа ядерного реактора | 2002 |
|
RU2217821C1 |
| БЛОК ЭЛЕКТРОМАГНИТОВ РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1999 |
|
RU2177181C2 |
| Привод регулирующего органа ядерного реактора | 1984 |
|
SU1227035A1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЯДЕРНОГО РЕАКТОРА С ДАТЧИКОМ ПОШАГОВОГО КОНТРОЛЯ ПОЛОЖЕНИЯ ОРГАНА РЕГУЛИРОВАНИЯ | 2001 |
|
RU2208846C2 |
| САМОКОММУТИРУЮЩИЙСЯ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 1995 |
|
RU2095870C1 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1990 |
|
SU1830148A3 |
| ЭЛЕКТРОПНЕВМОКЛАПАН (ВАРИАНТЫ) | 2006 |
|
RU2334151C2 |
| КЛАПАН ЗАПОРНЫЙ ЭЛЕКТРОМАГНИТНЫЙ | 2010 |
|
RU2477408C2 |

Изобретение относится к оборудованию ядерных энергетических установок и может быть использовано в механизмах управления ядерных реакторов. Техническим результатом изобретения является повышение тягового усилия привода и снижение ударных нагрузок на детали привода. Между подвижными полюсами тянущего, фиксирующего, запирающего электромагнитов и соответствующими нижними упорами установлены пружины, а также между подвижным полюсом тянущего электромагнита и нижним упором подвижного полюса тянущего электромагнита установлена пружина. Применение пружин в предлагаемом приводе компенсирует часть веса подвижных частей привода, делает характеристики усилия электромагнитов более плавными, увеличивает тяговые характеристики при неизменном токе питания электромагнитов. 1 з. п.ф-лы, 3 ил.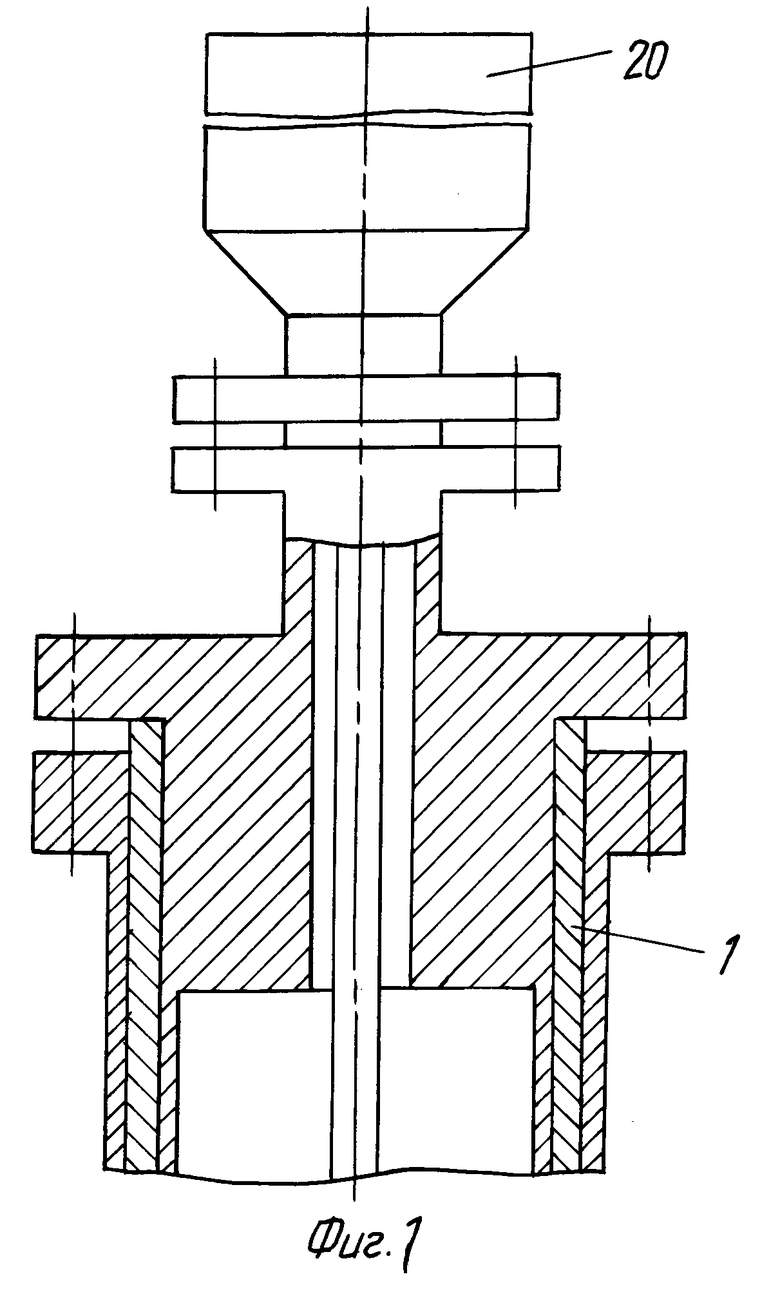
| RU 2059301 C1, 27.04.1996 | |||
| Привод органов регулирования ядерного реактора | 1972 |
|
SU435717A1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЯДЕРНОГО РЕАКТОРА С ДАТЧИКОМ ПОШАГОВОГО КОНТРОЛЯ ПОЛОЖЕНИЯ ОРГАНА РЕГУЛИРОВАНИЯ | 1994 |
|
RU2073917C1 |
| ГАЗОАНАЛИЗАТОР | 1991 |
|
RU2044303C1 |
| СПОСОБ ПОЛУЧЕНИЯ ПОЛИОРГАНОАЦЕТОКСИСИЛОКСАНОВ | 2008 |
|
RU2357978C1 |
| 0 |
|
SU187605A1 | |
| АНАЛОГО-ДИСКРЕТНАЯ МОДЕЛЬ ДЛЯ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ | 0 |
|
SU188163A1 |
| Угловой акселерометр | 1976 |
|
SU623158A2 |

