Изобретение относится к дифференциальным механизмам и может быть применено в различных областях науки и техники, в которых необходимо для решения каких-либо задач обеспечить управляемому объекту вращательное и результатирующее поступательное движения, при этом результатирующее поступательное движение может быть пропорционально разности или сумме составляющих поступательных движений отдельных звеньев механизма. Оно, например, может быть использовано в микротомах или механизмах тонкой регулировки - в микроманипуляторах.
Известен (а. с. 179136, МПК6 F 06 В, 21.09.1964, опубл. в БИ 4 от 03.02.1966) дифференциальный винт для механизмов точной настройки, содержащий две расположенные последовательно по длине винтовые нарезки.
Винтовые нарезки выполнены в виде винтовых пар. Правая винтовая нарезка состоит из неподвижного и подвижного звеньев, а вторая винтовая пара - из двух подвижных звеньев.
Недостатком известного дифференциального винта являются его ограниченные возможности, поскольку с помощью этого механизма нельзя обеспечить вращение выходного звена при его перемещении.
Известный (И. И. Артоболевский. Механизмы в современной технике. Том 3. М. : Наука, 1979, с. 383, рис.2118) механизм дифференциального винта для точной установки содержит две винтовые пары с различным ходом, первая из которых состоит из неподвижного и подвижного звеньев, а вторая состоит из двух подвижных звеньев, одно из которых является выходным звеном.
Недостатком данного дифференциального винта для точной установки также являются его ограниченные функциональные возможности, так как с его помощью нельзя обеспечить вращение выходного звена при его перемещении.
Задачей, решенной данным изобретением, является расширение функциональных возможностей механизма путем увеличения числа его степеней свободы.
Технический результат, достигаемый при использовании настоящего изобретения, заключается в обеспечении вращения выходного звена механизма при его результатирующем поступательном движении. Тем самым дифференциальный винтовой механизм, предназначенный для линейных перемещений какого-либо объекта, преобразован в механизм дифференциального выдвижного шпинделя.
Указанный выше технический результат достигается тем, что в дифференциальном выдвижном шпинделе, содержащем две винтовые пары с различным ходом, первая из которых состоит из неподвижного и подвижного звеньев, а вторая состоит из двух подвижных звеньев, одно из которых является выходным звеном механизма, другое подвижное звено второй винтовой пары выполнено отдельно от подвижного звена первой винтовой пары, при этом оно соединено с неподвижным и подвижным звеньями первой винтовой пары, образовав с ними соответственно поступательную и вращательную пары, выходное звено второй винтовой пары соединено с подвижным звеном первой винтовой пары, образовав с ним поступательную пару.
Выполнение подвижного звена второй винтовой пары отдельно от подвижного звена первой винтовой пары позволило выходному звену второй винтовой пары при своем вращении смещаться относительно этого звена. Для этого подвижное звено второй винтовой пары соединено с неподвижным звеном первой винтовой пары, образовав с ним поступательную пару. В результате этого звено не имеет возможности вращаться при вращении выходного звена второй винтовой пары. Соединение подвижного звена второй винтовой пары с подвижным звеном первой винтовой пары, с образованием между ними вращательной пары, позволило этому звену смещаться только вместе с подвижным звеном первой винтовой пары. Соединение выходного звена второй винтовой пары с подвижным звеном первой винтовой пары, с образованием с ним поступательной пары, позволило выходному звену при вращении подвижного звена первой винтовой пары вращаться вместе с ним и при этом смещаться относительно него. Вся совокупность признаков позволяет получить результатирующее движение выходного органа как сумму или разность составляющих движений с одновременным его вращением.
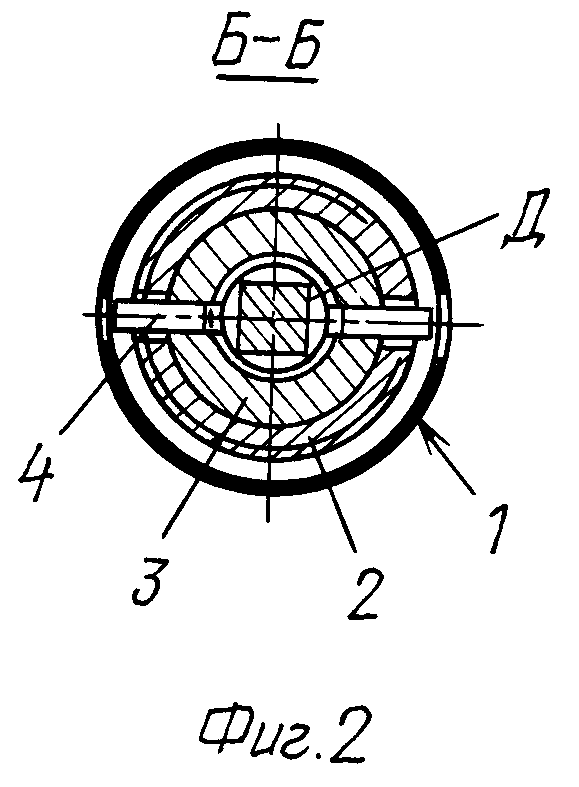
На фиг.1 показан предлагаемый механизм; на фиг.2 - сечение Б-Б.
Дифференциальный выдвижной шпиндель (см. фиг.1) содержит винтовую пару А и винтовую пару В. В винтовую пару А входят подвижное звено 1 и неподвижное звено 2. В винтовую пару В входят подвижные звенья 3 и 4. Подвижное звено 4 является выходным звеном механизма.
Подвижные звенья 1 и 3 выполнены отдельно друг от друга. Подвижное звено 3 соединено с неподвижным звеном 2, образовав с ним одноподвижную поступательную пару. Подвижное звено 3 также соединено с подвижным звеном 1, образовав с ним одноподвижную вращательную пару. Выходное звено 4 соединено с подвижным звеном 1, образовав с ним одноподвижную поступательную пару.
Конструктивное выполнение звеньев механизма и образованных ими кинематических пар может быть различным (не показано). Подвижное звено 1 может быть выполнено в виде гайки или винта. Соответственно неподвижное звено 2 может быть выполнено в виде винта или гайки. Одноподвижная поступательная пара, образованная звеньями 2 и 3, может быть выполнена в виде штыря, один конец которого жестко соединен с одним из этих звеньев, а другой его конец размещен в прорези, выполненной соответственно в другом звене этой пары. Вместо штыря и прорези в такой кинематической паре может быть выполнено подвижное шлицевое соединение или что-нибудь подобное. Одноподвижная вращательная пара, образованная звеньями 1 и 3, также может быть выполнена различно. Например, она может быть образована штырем, один конец которого жестко соединен с одним из этих звеньев, а другой его конец размещен в кольцевой канавке, выполненной в другом звене этой пары. Вместо штыря и кольцевой канавки в такой кинематической паре может быть выполнено разрезное пружинное кольцо, размещенное в кольцевых канавках, выполненных в обоих звеньях и сопрягающихся друг с другом. Также могут быть применены и другие известные технические решения. Одноподвижная поступательная пара, образованная звеньями 1 и 4, может быть выполнена аналогично кинематической паре, образованной звеньями 2 и 3.
Рассмотрим пример одного из возможных конкретных исполнений механизма дифференциального выдвижного шпинделя (см. фиг.1 и 2).
Винтовая пара А образована гайкой 1 и гильзой 2. На гильзе 2 выполнены наружная винтовая нарезка и один, по меньшей мере, паз Г. В рассматриваемом примере выполнения таких пазов имеется два. Винтовая пара В образована ползуном 3 и винтом 4. Ползун 3 выполнен в виде втулки с внутренней винтовой нарезкой. В ползуне 3 закреплены два штыря 5, свободные концы которых проведены через прорези Г и размещены в кольцевой канавке, выполненной в гайке 1. Один из концов винта 4 выполнен в виде длиномерного квадрата Д, сопряженного с квадратным отверстием, выполненным в гайке 1.
Механизм работает следующим образом.
При вращении гайки 1 она будет перемещаться вдоль своей оси вращения. Ползун 3, связанный с гайкой 1, перемещается вместе с ней, но при этом не вращается. Винт 4, тоже связанный с гайкой 1, вращается вместе с ней. При этом винт 4 будет перемещаться вдоль своей оси вращения. Гайка 1 и ползун 3 перемещаются на расстояние L, величина которого обуславливается количеством оборотов гайки 1 и величиной шага ее винтовой нарезки. Перемещение винта 4 обусловлено суммарным движением гайки 1 и самого винта 4 относительно ползуна 3, связанного с гайкой 1:
l=(t2±t1)•n,
где l - путь винта 4,
n - количество совершенных гайкой 1 оборотов,
t2 - шаг винтовой нарезки А,
t1 - шаг винтовой нарезки В.
Знак "+" - при одинаковых напрвлениях винтовой линии, знак "-" при разных направлениях винтовых линий.
При малой разности t2-t1 можно получить малое перемещение винта 4.
Использование данного изобретения позволяет получить дифференциальный механизм с большими функциональными возможностями, в результате которых его выходное звено преобразовано в выдвижной шпиндель. При закреплении на таком шпинделе заготовок или инструментов позволяет не только перемещать их, но и вращать. Тем самым область применения предлагаемого механизма может быть шире области применения известных дифференциальных винтовых механизмов.
Изобретение относится к передачам с винтовыми механизмами. В механизме содержатся две винтовые пары, первая из которых А состоит из неподвижного 2 и подвижного 1 звеньев, а вторая В состоит из двух подвижных звеньев, одно 4 из которых является выходным звеном механизма. Другое подвижное звено 3 второй винтовой пары В выполнено отдельно от подвижного звена 1 первой винтовой пары А. Звено 3 соединено посредством штыря 5 с неподвижным и подвижным 1 звеньями первой винтовой пары и образует с ними соответственно поступательную и вращательную пары. Выходное звено 4 второй винтовой пары В соединено с подвижным звеном 1 первой винтовой пары А и образует с ним поступательную пару. Предлагаемое техническое решение направлено на совмещение вращательного и поступательного движений. 2 ил.
Дифференциальный выдвижной шпиндель, содержащий две винтовые пары с различным ходом, первая из которых состоит из неподвижного и подвижного звеньев, а вторая - из двух подвижных звеньев, одно из которых является выходным звеном механизма, отличающийся тем, что другое подвижное звено второй винтовой пары выполнено отдельно от подвижного звена первой винтовой пары, при этом оно соединено с неподвижным и подвижным звеньями первой винтовой пары, образуя с ними соответственно поступательную и вращательную пары, выходное звено второй винтовой пары соединено с подвижным звеном первой винтовой пары, образуя с ним поступательную пару.
| ДИФФЕРЕНЦИАЛЬНЫЙ ВИНТ | 0 |
|
SU179136A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ | 1994 |
|
RU2123628C1 |
| US 5865272 C1, 02.02.1999 | |||
| КРАЙНЕР А | |||
| Механика машин | |||
| - М.: Машиностроение, 2000, с.173. | |||
