Изобретение относится к дифференциальным винтовым передачам и может применяться, в частности, в испытательной технике при испытании образцов на разрыв при постоянной скорости деформации.
Известен дифференциальный винтовой механизм (а. с. N 1397657, F 16 H 25/20, 1988 г.). Он содержит корпус с направляющей, два винта, которые могут вращаться как автономно, так и совместно, замыкаемые с помощью своих маховиков. Перемещение ползуна определяется формулой  где S1 - шаг одного винта и S2 - шаг другого.
где S1 - шаг одного винта и S2 - шаг другого.
Данный механизм обеспечивает малые перемещения ползуна и может применяться в устройствах точного позиционирования.
Недостатком данного механизма является то, что он не может применяться в устройствах, где необходимо обеспечить технологическую операцию, связанную с непрерывным малым перемещением в течение длительного времени, например нескольких суток.
Наиболее близким к изобретению является дифференциальный механизм (а.с. N 1216519, F 16 H 37/16, 1986 г.).
Он содержит корпус, расположенную в корпусе с возможностью вращения гайку, взаимодействующий с гайкой винт, установленный с возможностью осевого перемещения, кинематическую цепь, представляющую собой две пары зубчатых колес, связывающих винт с гайкой таким образом, что колесо, сидящее на винте, сопряжено с колесом, сидящим на валу, а следующее колесо, сидящее на валу, сопряжено с колесом, сидящем на гайке.
Данный механизм позволяет передавать большие усилия с относительно малой скоростью перемещения. Однако получение сверхмалых перемещений, необходимых, например, в устройствах для испытания образцов на растяжение с постоянной скоростью деформации, данный механизм не обеспечивает.
Задача изобретения - расширение технологических возможностей, а именно: обеспечение сверхмалых перемещений рабочего органа как при малых, так и при больших нагрузках, при непрерывной длительной работе и относительно малых габаритах, снижение стоимости изготовления.
Это достигается тем, что в дифференциальном механизме, содержащем корпус, расположенную в корпусе с возможностью вращения гайку, взаимодействующий с гайкой винт, установленный с возможностью осевого перемещения, кинематическую цепь, представляющую собой две пары зубчатых колес, связывающих винт с гайкой, таким образом, что колесо, сидящее на винте, сопряжено с колесом, сидящим на валу, а следующее колесо, сидящее на валу, сопряжено с колесом, сидящем на гайке, согласно изобретению колеса, сидящие соответственно на гайке и на валу, имеют число зубьев Z, сопряженные с ними колеса, соответственно, следующее: сидящее на валу имеет число зубьев Z-1, а сидящее на винте - Z+1.
На чертеже изображена схема предлагаемого механизма.
Дифференциальный механизм состоит из корпуса 1, винта 2, расположенной в корпусе с возможностью вращения гайки 3, взаимодействующей с винтом 2, кинематической цепи, представляющей собой две пары зубчатых колес 4, 5 и 6, 7, связывающих винт 2 с гайкой 3 с помощью вала 8, который расположен в корпусе 1.
Колесо 4, сидящее на винте 2, имеет количество зубьев Z+1, а колесо 5, сопряженное с ним и сидящее на валу 8, имеет число зубьев Z, следующее колесо 6, сидящее на валу 8, имеет количество зубьев Z-1, а сопряженное с ним колесо 7, сидящее на гайке 3, имеет число зубьев Z.
Одинаковое межосевое расстояние между зубчатыми парами обеспечивается смещением зуборезного инструмента при нарезании зубчатых колес. Винт 2 выполнен с возможностью перемещения вдоль оси в зубчатом колесе 4.
Работа механизма заключается в том, что при вращении вала 8 винт 2 и гайка 3 вращаются в одну сторону, но с разной скоростью. Различие в скорости вращения обеспечивается разным передаточным отношением между зубчатыми парами 5, 4 и 6, 7.
В результате сложения вращательных движений винта 2 и гайки 3 перемещение винта 2 относительно гайки 3 может быть крайне мало и определяется следующей формулой:
V= (nв-nг)t= (nд•Z/(Z+1)-nд•(Z-1)/Z)t= =nдt(Z/(Z+1)-(Z-1)/Z)=nдt•1/Z2+Z, где
V - скорость движения винта 2, мм/мин;
nг - частота вращения гайки 3, об/мин;
nв - частота вращения винта 2, об/мин;
nд - частота вращения двигателя, равная частоте вращения вала 8, л(об/мин);
t - шаг винта 2;
Z - количество зубьев на колесах зубчатых 5 и 7.
Скорость перемещения винта 2 в предлагаемом дифференциальном механизме по отношению к скорости перемещения винта, непосредственно связанного с двигателем, уменьшается в Z2 + Z раз. В известном же устройстве с червячной передачей уменьшение скорости перемещения винта не превышает семидесяти, что равняется передаточному отношению червячной пары в силовых передачах. Для обеспечения уменьшения скорости перемещения винта, сравнимой со скоростью в предлагаемом дифференциальном механизме, необходимо строить многоступенчатые червячные передачи, что резко повышает габариты конструкции и увеличивает стоимость как за счет увеличения объема работ, так и за счет резкого увеличения дорогостоящих антифрикционных материалов, применяемых в червячных передачах.
Реверсирование горизонтального движения винта может осуществляться с помощью изменения местоположения колес зубчатых - колесо 5 с колесом 6, колесо 4 с колесом 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ | 2005 |
|
RU2303184C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ | 2001 |
|
RU2216666C2 |
| СТЕНД ДЛЯ УСТАЛОСТНЫХ ИСПЫТАНИЙ ОБРАЗЦОВ | 2006 |
|
RU2327134C1 |
| УСТРОЙСТВО ПРЕЦИЗИОННОГО МЕХАНИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ | 2013 |
|
RU2534854C1 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2009 |
|
RU2419018C1 |
| ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ С ПРОМЕЖУТОЧНЫМИ ЗВЕНЬЯМИ | 1994 |
|
RU2094676C1 |
| ЗУБОФРЕЗЕРНЫЙ СТАНОК С ГИДРАВЛИЧЕСКИМИ СВЯЗЯМИ ДЛЯ НАРЕЗАНИЯ ЦИЛИНДРИЧЕСКИХ ЗУБЧАТЫХ КОЛЕС МЕТОДОМ ДИАГОНАЛЬНОЙ ПОДАЧИ | 1999 |
|
RU2165828C2 |
| СТАНОК РЕЛЬСОСВЕРЛИЛЬНЫЙ ПЕРЕНОСНЫЙ | 1999 |
|
RU2171328C2 |
| ГЛАВНАЯ ПЕРЕДАЧА | 1998 |
|
RU2153424C2 |
Изобретение направлено на обеспечение сверхмалых перемещений. Кинематическая цепь, представляющая собой две пары зубчатых колес, связывает винт с гайкой. Винт установлен в корпусе с возможностью осевого перемещения. Колесо, сидящее на винте, имеет число зубьев Z+1 и сопряжено с колесом кинематической цепи, сидящим на валу, которое имеет число зубьев Z. Колесо, сидящее на гайке, имеет число зубьев Z и сопряжено с колесом, сидящим на валу и имеющим число зубьев Z-1. 1 ил.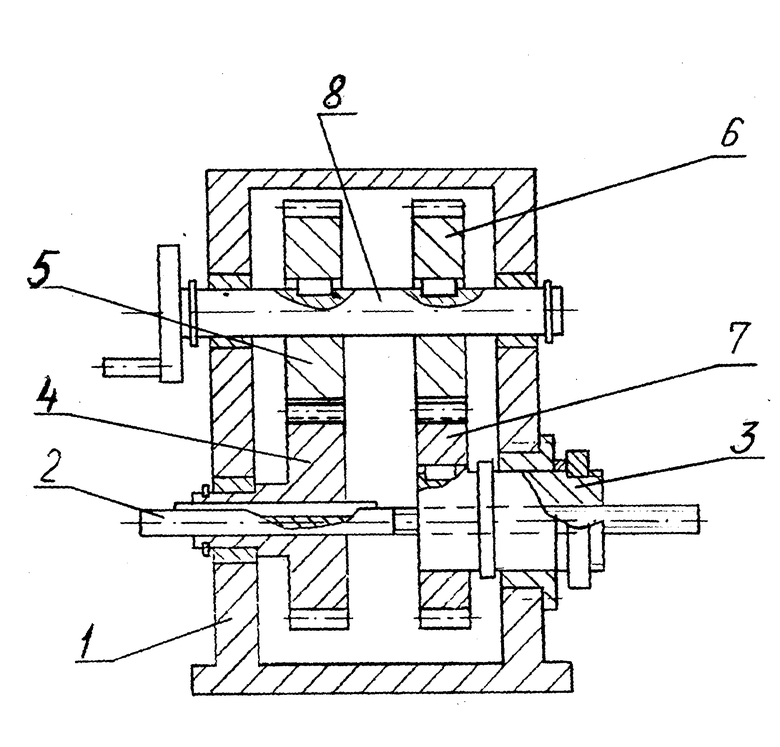
Дифференциальный механизм, содержащий корпус, расположенную в корпусе с возможностью вращения гайку, взаимодействующий с гайкой винт, установленный с возможностью осевого перемещения, кинематическую цепь, представляющую собой две пары зубчатых колес, связывающих винт с гайкой таким образом, что колесо, сидящее на винте, сопряжено с колесом, сидящим на валу, а следующее колесо, сидящее на валу, сопряжено с колесом, сидящим на гайке, отличающийся тем, что колеса, сидящие соответственно на гайке и на валу, имеют число зубьев Z, сопряженные с ними колеса соответственно следующее, сидящее на валу имеет число зубьев Z - 1, а сидящее на винте - Z + 1.
| SU, 1397657 A1, 1988 | |||
| SU, 1216519 A1, 1986. |
