Область техники, к которой относится изобретение
Настоящее изобретение имеет отношение к связи. Более конкретно настоящее изобретение касается нового улучшенного способа и устройства для контроля функционирования потенциально стробированного канала.
Уровень техники
Ассоциация промышленности средств электросвязи разработала стандарт для систем связи множественного доступа с кодовым разделением каналов (МДКР) в промежуточном стандарте ПС-95А (IS-95A), называемом «Стандарт совместимости базовой станции и подвижной станции для двухрежимной широкополосной системы сотовой связи с расширенным спектром» (определенном здесь как ПС-95). В системах ПС-95 подвижная станция управляет мощностью своих передач посредством комбинации способов управления мощностью по разомкнутой цепи и по замкнутой цепи. При управлении мощностью по разомкнутой цепи подвижная станция измеряет принятую мощность сигнала прямой линии связи от обслуживающей базовой станции и корректирует мощность передачи по обратной линии связи в соответствии с этим измерением. При управлении мощностью по замкнутой цепи обслуживающая базовая станция измеряет мощность передач от подвижной станции и на основе этого измерения передает ряд команд на повышение/снижение мощности к подвижной станции, которая в ответ корректирует свои передачи. Система управления мощностью, использующая объединенные выгоды управления мощностью по замкнутой цепи и по разомкнутой цепи, подробно описана в патенте США №5056109, называемом «Способ и устройство для управления мощностью передачи в сотовой телефонной системе мобильной связи МДКР».
Согласно ПС-95 во время вызова от подвижной станции требуется мониторинг работы прямого канала трафика. Когда подвижная станция принимает двенадцать (N2m) последовательных плохих кадров, от подвижной станции требуется блокирование передатчика, чтобы он не создавал помех по обратной линии связи. Соответственно, если подвижная станция принимает два (N3m) последовательных хороших кадра, то она должна повторно активизировать свой передатчик. Также подвижная станция поддерживает таймер замираний. Сначала таймер замираний активизируется при активизации подвижной станцией своего передатчика в начале вызова, и он сбрасывается на пять (Т5m) секунд каждый раз, когда на прямом канале трафика принимаются два (N3m) последовательных хороших кадра. При истечении таймера замираний подвижная станция блокирует свой передатчик, объявляет потерю прямого канала трафика и завершает вызов.
Международный союз электросвязи недавно затребовал подачу документов по способам, предлагаемым для обеспечения на каналах радиосвязи услуг высокоскоростных данных и высококачественной речи. Первая часть этих предложений выпущена ассоциацией промышленности средств электросвязи и называется «Возможные предложения по технологии радиодоступа МДКР2000 МСЭ-R» (называется здесь, как МДКР2000). Согласно МДКР2000 эквивалентами прямого канала трафика в ПС-95 являются прямой основной канал (П-ОК) и прямой специализированный канал управления (П-СКУ). Передаваемые на этих каналах кадры данных по продолжительности могут составлять 20 или 5 мс. Для П-ОК кадр (20 или 5 мс) передается с 20 мс интервалом, выровненным относительно начала системного времени МДКР. Для П-СКУ передача может быть прерывистой, так что в 20 мс интервале, выровненном относительно системного времени МДКР, кадр данных может не передаваться.
Использование способов модуляции множественного доступа с кодовым разделением каналов (МДКР) является одним из нескольких способов для облегчения связи, в которой имеется большое количество пользователей системы. В технике известны другие способы множественного доступа, используемые в системах связи, например множественный доступ с временным разделением каналов (МДВР) и множественный доступ с частотным разделением каналов (МДЧР). Однако для систем связи множественного доступа способ модуляции с расширенным спектром МДКР имеет значительные преимущества перед этими способами модуляции. Использование способов МДКР в системе связи множественного доступа описано в патенте США №4901307, называемом «Система связи множественного доступа с расширенным спектром, использующая спутниковые или наземные ретрансляторы». Дополнительно использование способов МДКР в системе связи множественного доступа описано в патенте США №5103459, называемом «Система и способ формирования форм сигнала в системе сотовой телефонной связи МДКР».
МДКР, будучи по своей природе широкополосным сигналом, предлагает форму разнесения частоты путем расширения мощности сигнала по ширине полосы частот. Следовательно, выборочное замирание частоты воздействует только на малую часть ширины полосы частот сигнала МДКР. Разнесение в пространстве, или по трассе получается путем обеспечения многих траекторий сигналов через одновременно работающие линии связи от подвижного пользователя через два или более пунктов сотовой связи. Кроме того, разнесение по трассе может быть получено путем использования среды, содержащей много траекторий, через обработку расширенного спектра, допуская отдельно прием и обработку сигнала, поступающего с различными задержками на распространение. Примеры разнесения по трассе иллюстрируются в патенте США №5101501, называемом «Способ и система для обеспечения гибкой передачи обслуживания при осуществлении связи в системе сотовой телефонной связи МДКР» и в патенте США №5109390, называемом «Приемник с разнесенным приемом в системе сотовой телефонной связи МДКР».
В системе связи, предусматривающей данные, использующие формат модуляции квадратурной фазовой манипуляции КФМ, может быть получена очень полезная информация при получении перекрестного произведения синфазной I и квадратурной Q составляющих сигнала КФМ. Зная относительные фазы этих двух составляющих, можно приблизительно определить скорость подвижной станции относительно базовой станции. Описание схемы для определения перекрестного произведения составляющих I и Q в системе связи с модуляцией КФМ приведено в патенте США №5506865, называемом «Схема скалярного произведения для несущей пилот-сигнала».
Существует растущая потребность в обеспечении передачи цифровой информации на высоких скоростях системами радиосвязи. Один способ передачи высокоскоростных цифровых данных от удаленной станции к центральной базовой станции состоит в том, чтобы позволить удаленной станции передавать данные, используя способы МДКР с расширенным спектром. Один из предложенных способов состоит в том, чтобы позволить удаленной станции передавать информацию, используя малый набор ортогональных каналов, этот способ подробно описан в находящейся в процессе одновременного рассмотрения патентной заявке США №08/886.604, называемой «Система радиосвязи МДКР с высокоскоростными данными».
Требуются новые способы контроля П-СКУ, когда П-СКУ находится в режиме прерывистой передачи (ПП), так как теперь подвижная станция должна принимать решение, является ли принятый кадр хорошим кадром плохим кадром или пустым кадром (то есть передачи нет).
Сущность изобретения
Настоящее изобретение предлагает новый улучшенный способ и устройство для контроля потенциально стробированного канала в системе радиосвязи.
Первый способ является расширением способа, используемого ПС-95, с пустыми кадрами просто игнорируемыми, но потенциально с разными пороговыми значениями. Подвижная станция поддерживает счетчик последовательных плохих кадров, СЧТ1, и счетчик последовательных хороших кадров, СЧТ2. В начале вызова СЧТ1 и СЧТ2 установлены в нулевое значение. Для каждого принятого кадра подвижная станция определяет, является ли этот кадр хорошим, плохим или пустым. Если принятый кадр является хорошим, то СЧТ1 сбрасывается в нулевое значение, а СЧТ2 увеличивается на 1. Если принятый кадр является плохим, то СЧТ1 увеличивается на единицу, а СЧТ2 сбрасывается в нулевое значение. Если принятый кадр является пустым, то СЧТ1 и СЧТ2 не меняются. Если СЧТ1 достигает порогового значения, ПОРОГ1, то подвижная станция блокирует свой передатчик. Соответственно, если СЧТ2 достигнет порогового значения, ПОРОГ2, то подвижная станция повторно активизирует свой передатчик. Подвижная станция сбрасывает свой таймер замираний к Х секундам всякий раз, когда СЧТ2 становится равен или больше значения ПОРОГ3.
Во втором возможном варианте осуществления базовая станция периодически передает «контрольный кадр» (например, в начале каждого N-секундного интервала, синхронизированного относительно системного времени МДКР), если в это время нет кадра данных для передачи на П-СКУ. Контрольный кадр передается с самой низкой скоростью передачи данных, оговоренной между базовой станцией и подвижной станцией. Затем подвижная станция осуществляет контроль П-СКУ по кадрам, передаваемым в определенное заданное время способом, аналогичным способу, определенному в ПС-95, потенциально с разными значениями для разных пороговых значений. Подвижная станция дополнительно к этим периодическим кадрам также может содержать другие не пустые кадры, принятые в целях контроля.
В третьем возможном варианте осуществления базовая станция передает «контрольный кадр» каждый раз, когда количество последовательных пустых кадров превышает пороговое значение или когда количество пустых кадров (последовательных или не последовательных) за заданный интервал превышает некоторое пороговое значение. Это гарантирует наличие у подвижной станции некоторых не пустых кадров для осуществления контроля всегда, когда требуется.
В четвертом возможном варианте осуществления подвижная станция передает сообщение, требующее ответа от базовой станции (к примеру, ответом может быть просто подтверждение приема), когда количество обнаруженных последовательных пустых кадров превышает пороговое значение. Это гарантирует прием подвижной станцией не пустого кадра для осуществления контроля.
В пятом возможном варианте осуществления подвижная станция передает сообщение, требующее ответа от базовой станции (к примеру, ответом может быть просто подтверждение приема), когда количество обнаруженных пустых кадров (последовательных или не последовательных) за заданный интервал превышает пороговое значение. Это гарантирует прием подвижной станцией не пустого кадра для осуществления контроля всегда, когда требуется.
В шестом возможном варианте осуществления для осуществления контроля П-СКУ подвижная станция использует принимаемый уровень пилот-сигнала (Ес/Io) пилот-сигналов из активного набора. Если суммарное значение Ес/Io пилот-сигналов активного набора превышает заданное пороговое значение, то подвижная станция рассматривает принятые корректно данные, если в этом кадре передаются данные как хороший кадр. Иначе подвижная станция рассматривает кадр как плохой. Затем правило контроля с описанным выше определением хорошего и плохого кадров, аналогично определенному в ПС-95, может использоваться с теми же пороговыми значениями или с измененными пороговыми значениями.
Краткое описание чертежей
Особенности, задачи и преимущества настоящего изобретения станут более очевидны из приведенного ниже подробного описания, сопровождаемого чертежами, в которых используется сквозная нумерация.
Фиг.1 является схемой, иллюстрирующей элементы системы радиосвязи.
Фиг.2 является функциональной схемой базовой станции согласно настоящему изобретению.
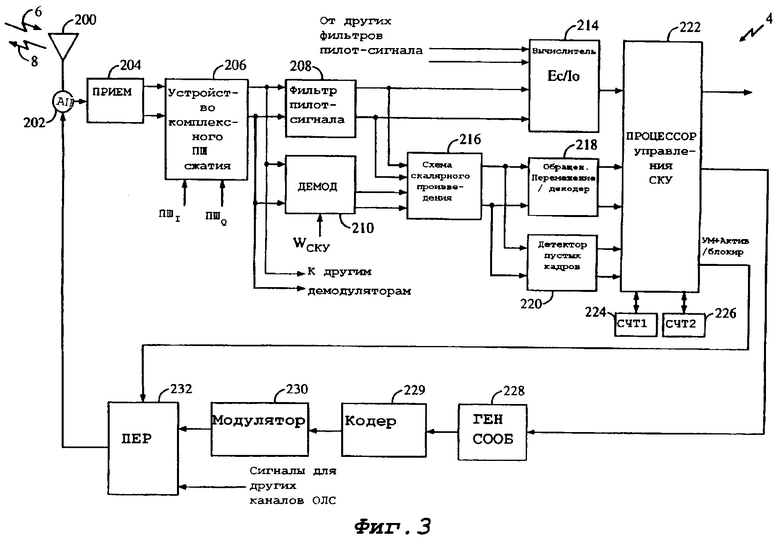
Фиг.3 является функциональной схемой подвижной станции согласно настоящему изобретению.
Подробное описание предпочтительных вариантов осуществления
На фиг.1 показана базовая станция 2, передающая сигналы 6 прямой линии связи к подвижной станции 4. Подвижная станция 4 передает сигналы 8 обратной линии связи к базовой станции 2. В возможном варианте осуществления сигналы 6 прямой линии связи и сигналы 8 обратной линии связи являются сигналами связи множественного доступа с кодовым разделением каналов (МДКР) в соответствии с возможными предложениями ассоциации промышленности средств электросвязи для международного союза электросвязи (МСЭ), называемыми «Возможные предложения по технологии радиодоступа МДКР2000 МСЭ-R», дополнительно усовершенствованными в рабочем тексте промежуточного стандарта, называемом «Бюллетень предложений для физического уровня МДКР2000».
На фиг.2 более подробно показаны элементы, необходимые для передачи П-СКУ сигнала 6 прямой линии связи и для приема сигнала 8 обратной линии связи. Сообщения для передачи на П-СКУ формируются в генераторе 100 сообщений П-СКУ (ГЕН СООБ СКУ). Эти сообщения могут содержать сообщения планирования скоростей, сообщения направления передачи обслуживания и ответные сообщения (как будет описано ниже). Как сказано ранее, П-СКУ является каналом ПП, который передается при наличии сообщения для передачи и не передается, когда нет сообщений для передачи на П-СКУ.
Сообщение подается на элемент 102 обработки П-СКУ. Элемент 102 обработки П-СКУ выполняет необходимую предварительную обработку и кодирование сообщения П-СКУ (когда имеется) и формирует каналы для передачи сообщения на П-СКУ сигнала 6 прямой линии связи. Сообщение П-СКУ подается на генератор 104 битов контроля циклическим избыточным кодом ЦКИ и хвостовых битов. В ответ генератор 104 битов ЦИК и хвостовых битов формирует набор битов контроля циклическим избыточным кодом (ЦИК) в соответствии с битами в сообщении П-СКУ и добавляет биты ЦИК к сообщению П-СКУ. Затем генератор 104 битов ЦИК и хвостовых битов добавляет ряд хвостовых битов для установки в исходное состояние памяти декодера в приемнике и подает полученный в результате пакет в кодер 106.
В возможном варианте осуществления кодер 106 является сверточным кодером. Его конструкция и реализация хорошо известны в данной области техники. Для специалистов в данной области техники очевидно, что настоящее изобретение в равной степени применимо к другим кодерам, например, к блочным кодерам и турбокодерам. Закодированные символы подаются на устройство 108 перемежения. Устройство 108 перемежения переупорядочивает символы в заданном режиме для обеспечения разнесения по времени в передаче сообщения П-СКУ. Обычно в системах радиосвязи ошибки возникают в пакетах. Декодеры обладают значительными преимуществами функционирования при борьбе с ошибками, которые возникают не в пакетах. Операция перемежения помогает распространить результат пакета ошибок по пакету для улучшения функционирования декодера в приемнике.
Перемеженные символы подаются на пробивающий элемент 109 управления мощностью. Пробивающий элемент 109 принимает биты управления мощностью обратной линии связи и пробивает биты управления мощностью в потоке перемеженных символов. Биты управления мощностью передаются в подвижную станцию 4 и используются для корректировки мощности передачи сигнала 8 обратной линии связи.
Из пробивающего элемента 109 символы подаются на демультиплексор 110, который альтернативно выводит символы в две разные ветви обработки. Первый выходной сигнал демультиплексора 110 подается в элемент 112А расширения, следующий выходной сигнал демультиплексора 110 подается в устройство 112В расширения и так далее. Устройства 112 расширения осуществляют расширение демультиплексированных символов в соответствии с ортогональной расширяющей функцией Wску. Ортогональное расширение хорошо известно в данной области техники, и предпочтительный вариант осуществления устройств 112 расширения описан в упомянутом выше патенте США №5103459. Расширенные сигналы подаются в устройство 116 комплексного ПШ расширения.
В возможном варианте осуществления базовая станция 2 дополнительно к специализированному каналу управления передает канал пилот-сигнала для обеспечения подвижной (удаленной) станции 4 возможности осуществить когерентную демодуляцию принятого П-СКУ. Символы пилот-сигнала, обычно каждая последовательность, подаются на элемент 114 расширения. Расширение символов пилот-сигнала обычно осуществляется в соответствии с ортогональной расширяющей последовательностью Wпилот, ортогональной расширяющей последовательности Wску.
Расширенные сигналы из элементов 112 и 114 расширения подаются в устройство 116 комплексного ПШ расширения. Устройство 116 комплексного ПШ расширения осуществляет расширение сигналов от устройств 112 и 114 расширения в соответствии с двумя псевдошумовыми (ПШ) последовательностями ПШI и ПШQ. Комплексное ПШ расширение хорошо известно в данной области техники и подробно описано в возможных предложениях по МДКР2000, в рабочем тексте спецификаций ПС-2000 и упомянутой выше патентной заявке США №08/856.428, находящейся в процессе одновременного рассмотрения. Расширенный с помощью комплексного ПШ расширения сигнал подается в передатчик (ПЕР) 118. Передатчик 118 преобразует с повышением частоты, усиливает и фильтрует расширенные сигналы для передачи через антенну 120, как сигнал 6 прямой линии связи. В возможном варианте осуществления передатчик 118 модулирует сигнал в соответствии с форматом модуляции КФМ.
Согласно фиг.3 сигнал 6 прямой линии связи принимается антенной 200 и подается через антенный переключатель 202 в приемник (ПРИЕМ) 204. Приемник 204 преобразует с понижением частоты, усиливает и фильтрует сигнал 6 прямой линии связи. Согласно возможному варианту осуществления приемник 204 осуществляет демодуляцию сигнала 6 прямой линии связи в соответствии с форматом демодуляции КФМ и выводит синфазный и квадратурный сигналы в устройство 206 комплексного ПШ сжатия. Устройство 206 комплексного ПШ сжатия сжимает принятый сигнал в соответствии с двумя псевдошумовыми последовательностями, используемыми для расширения сигнала (ПШI и ПШQ).
Сигналы, сжатые с помощью комплексного ПШ сжатия, подаются в фильтр 208 пилот-сигнала. Фильтр 208 пилот-сигнала сжимает сигнал в соответствии с ортогональной расширяющей последовательностью Wпилот. Сжатые символы пилот-сигнала подаются на вычислитель 214 Ec/Io и схему 216 скалярного произведения.
Сигналы, сжатые с помощью комплексного ПШ сжатия, также подаются в демодулятор 210. Демодулятор 210 осуществляет демодуляцию сигналов, сжатых с помощью ПШ сжатия в соответствии с ортогональным расширяющим кодом Wску. Затем сжатые сигналы подаются в схему 216 скалярного произведения. Схема 216 скалярного произведения вычисляет скалярное произведение П-СКУ и канала пилот-сигнала. Так как канал пилот-сигнала и специализированный канал управления проходят по одной и той же траектории распространения, то они будут иметь одинаковые фазовые сдвиги. В результате вычисления скалярного произведения канала пилот-сигнала и канала СКУ получается скалярный набор модулей с удаленной внесенной каналом неоднозначностью фаз. Предпочтительная реализация схемы 216 скалярного произведения подробно описана в упомянутом выше патенте США №5506865.
Полученные в результате демодулированные символы из схемы 216 скалярного произведения подаются в устройство обращенного перемежения / декодер 218 и детектор 220 пустого кадра. Устройство обращенного перемежения / декодер 218 осуществляет обратное перемежение и декодирует сообщение П-СКУ и подает оценку сообщения, или сигнал, определяющий объявление плохого кадра, в процессор 222 управления СКУ. Имеется ряд способов обнаружения плохого кадра. Первым способом является определение, сверяются ли биты контроля циклическим избыточным кодом, сформированные локально в удаленной станции 4, с декодируемыми битами ЦИК. Вторым способом является вычисление частоты появления ошибочных символов путем сравнения принятых закодированных символов с набором локально сформированных повторно закодированных символов на основе декодируемых битов.
Демодулированные символы из схемы 216 скалярного произведения также подаются в детектор 220 пустого кадра. В возможном варианте осуществления детектор 220 пустого кадра вычисляет отношение сигнал / шум для демодулированных символов и сравнивает измеренное отношение сигнал / шум с пороговым значением. Если отношение сигнал / шум ниже порогового значения, то объявляется пустой кадр. Следует отметить, что существуют другие способы определения пустого кадра, не удаляясь от сущности настоящего изобретения, можно использовать любой из них. Способ и устройство для обнаружения пустых кадров описаны в находящейся в процессе одновременного рассмотрения патентной заявке США №09/150.493, поданной 9 сентября 1998 года и называемой «Система и способ обнаружения скорости передачи на основе мощности».
Не пустые кадры данных подаются в процессор 222 управления СКУ, который извлекает пробитые команды управления мощностью и передает сигнал в передатчик 232, в ответ корректирующему мощность передачи сигнала 8 обратной линии связи. Потеря этого потока команд управления мощностью приводит к неспособности управлять мощностью сигнала 8 обратной линии связи и, потенциально, к созданию помех по обратной линии связи.
В первом варианте осуществления настоящего изобретения процессор 222 управления СКУ принимает из декодера 218 или из детектора 220 определение, что кадр является хорошим, плохим или пустым. В начале вызова два счетчика (СЧТ1) 224 и (СЧТ2) 226 инициализируются в нулевое значение. Если принятый кадр является хорошим кадром, то счетчик 224 сбрасывается в нулевое значение, а счетчик 226 увеличивается на единицу. Если принятый кадр объявлен плохим кадром, то счетчик 224 увеличивается, а счетчик 226 сбрасывается в нулевое значение. Если кадр объявлен пустым, то значения счетчиков 224 и 226 остаются неизменными. Если значение счетчика 224 достигает порогового значения ПОРОГ1, то процессор 222 управления СКУ передает сигнал в передатчик 232, блокируя передатчик (то есть выключается выходная мощность). Соответственно, если значение счетчика 226 достигает порогового значения ПОРОГ2, то процессор 222 управления СКУ передает сигнал передатчику 232, повторно активизируя передатчик.
Во втором возможном варианте осуществления каждый N-секундный интервал базовая станция 2 передает кадр, называемый здесь как контрольный кадр, если в это время нет кадра данных для передачи на П-СКУ. В предпочтительном варианте осуществления контрольный кадр содержит известные подвижной станции заданные биты и передается на самой низкой скорости передачи данных, которая оговорена между базовой станцией 2 и подвижной станцией 4.
Согласно фиг.2 таймер 134 отслеживает N-секундные интервалы и по истечении интервала передает сигнал процессору 132 управления. Процессор 132 управления определяет, имеется ли сообщение для передачи, и если не имеется, то подает сигнал в генератор 100 сообщений для формирования контрольного кадра. Контрольный кадр передается на канале П-СКУ, как было описано раньше в отношении других сообщений СКУ. Затем подвижная станция 4 осуществляет управление П-СКУ по не пустым кадрам, передаваемым в определенное заданное время способом, аналогичным способу, определенному в ПС-95, потенциально с разным значением для разных пороговых значений. Подвижная станция 4 дополнительно к этим периодическим кадрам также может содержать другие не пустые кадры, принятые в целях управления. Следует отметить, что контрольный кадр формируется периодически на основе значения счета счетчика 130 фиг.2.
В третьем возможном варианте осуществления базовая станция 2 передает кадр, называемый здесь как контрольный кадр, каждый раз, когда количество последовательных пустых кадров превышает пороговое значение. В предпочтительном варианте осуществления контрольный кадр содержит заданные биты, известные подвижной станции, и передается на самой низкой скорости передачи данных, оговоренной между базовой станцией 2 и подвижной станцией 4.
Согласно фиг.2 процессор 132 управления отслеживает количество последовательных пустых кадров в соответствии с сигналами из генератора 100 сообщений. Когда количество последовательных пустых кадров превышает пороговые значения, то процессор управления передает в генератор 100 сообщений сигнал на выдачу контрольного кадра для формирования контрольного кадра. Контрольный кадр передается на канале П-СКУ, как описано в отношении других сообщений П-СКУ. Затем подвижная станция 4 осуществляет управление П-СКУ по всем не пустым кадрам способом, аналогичным способу, определенному в ПС-95, с потенциально разным значением для разных пороговых значений.
В четвертом возможном варианте осуществления подвижная станция 4 передает сообщение, требующее ответа от базовой станции 2 (к примеру, ответом может быть просто подтверждение приема), когда количество обнаруженных последовательных пустых кадров превышает пороговое значение. Согласно фиг.3 процессор 222 управления принимает определение, является ли кадр пустым, из детектора 220 пустого кадра. В этом варианте осуществления счетчик 224 отслеживает количество последовательных пустых кадров и сбрасывается при обнаружении плохого или хорошего кадра. Когда количество последовательных пустых кадров превышает пороговое значение, процессор 222 управления передает сигнал генератору 228 сообщений (ГЕН СООБ), формирующему в ответ сообщение с запросом. Сообщение с запросом кодируется в кодере 229, модулируется в модуляторе 230, преобразуется с повышением частоты, усиливается и фильтруется в заданный канал сигнала 8 обратной линии связи. Сообщением с запросом может быть любое существующее сообщение, уже определенное в стандарте, не вызывающее какое-либо действие базовой станции, кроме передачи подтверждения приема. К примеру, сообщение с отчетом об измерении мощности. Сообщение с запросом также может быть специальным сообщением, вызывающим передачу базовой станцией 2 контрольного кадра на П-СКУ.
Согласно фиг.2 сообщение с запросом принимается антенной 122 и подается в приемник 124, который преобразует с понижением частоты, усиливает и фильтрует сигнал 8 обратной линии связи, и подает принятый сигнал в демодулятор 126. Демодулятор 126 осуществляет демодуляцию сигнала, декодер 128 декодирует демодулированные символы, подавая сообщение с запросом в процессор 132 управления. В ответ процессор 132 управления определяет, имеется ли в очереди сообщение для передачи на П-СКУ, и если нет, то передает сигнал, требующий формирование генератором 100 сообщений сообщения для передачи на П-СКУ. В возможном варианте осуществления сообщением, сформированным генератором 100, является просто подтверждение приема сообщения с запросом от подвижной станции 4.
В пятом возможном варианте осуществления подвижная станция 4 передает сообщение, требующее ответа от базовой станции 2, когда количество пустых кадров, обнаруженных внутри заданного количества принятых кадров превышает пороговое значение вне зависимости от того, являются пустые кадры последовательными или нет. Согласно фиг.3 процессор управления 222 принимает определение, является ли кадр пустым из детектора 220 пустого кадра. Счетчик 224 отслеживает количество пустых кадров в режиме скользящего сумматора. Когда количество пустых кадров в заданном количестве принятых кадров превышает пороговое значение, процессор 222 управления передает сигнал генератору 228 сообщений (ГЕН СООБ), формирующему в ответ сообщение с запросом. Сообщение с запросом кодируется в кодере 229, модулируется в модуляторе 230 и преобразуется с повышением частоты, усиливается и фильтруется в заданный канал сигнала 8 обратной линии связи.
Согласно фиг.2 сообщение с запросом принимается антенной 8 и подается в приемник 124, который преобразует с понижением частоты, усиливает и фильтрует сигнал 8 обратной линии связи и подает принятый сигнал в демодулятор 126. Демодулятор 126 осуществляет демодуляцию сигнала, декодер 128 декодирует демодулированные символы, подавая сообщение с запросом в процессор 132 управления. В ответ процессор 132 управления 132 определяет, имеется ли в очереди сообщение для передачи на П-СКУ, и если нет, то передает сигнал, требующий формирование генератором 100 сообщений сообщения для передачи на П-СКУ. В возможном варианте осуществления сообщение, сформированное генератором 100, является просто подтверждением приема сообщения с запросом.
В шестом возможном варианте осуществления для осуществления управления П-СКУ подвижная станция 4 использует принимаемый уровень пилот-сигнала (Ес/Io) пилот-сигналов из активного набора. Если суммарное значение Ес/Io пилот-сигнала активного набора превышает заданное пороговое значение, то подвижная станция 4 рассматривает принятые корректно данные если в этом кадре передаются данные как хороший кадр. Иначе подвижная станция 4 рассматривает кадр как плохой. Затем правило управления с описанным выше определением хорошего и плохого кадров, аналогично определенному в ПС-95, может использоваться с теми же пороговыми значениями или с измененными пороговыми значениями.
Согласно фиг.3 отношение сигнал/шум (Ес/Io) принятых символов пилот-сигнала вычисляется в вычислителе 214 Ec/Io. Значение Ec/Io для пилот-сигнала сигнала 6 прямой линии связи суммируется с значением Ec/Io пилот-сигналов из других базовых станций в активном наборе подвижной станции 4 для обеспечения суммарного значения Ec/Io. Активным набором базовых станций является набор базовых станций, в текущее время поддерживающих связь с подвижной станцией 4. Суммарное значение Ec/Io пилот-сигнала подается в процессор 222 управления, который сравнивает суммарное значение Ec/Io с пороговым значением. Если суммарное значение Ec/Io превышает пороговое значение, то объявляется хороший кадр, а если суммарное значение Ec/Io меньше порогового значения, то объявляется плохой кадр. Это позволяет подвижной станции 4 сделать заключение, хорошим или плохим кадром является принятый кадр, если он не является пустым, не осуществляя декодирования кадра. Основываясь на этих подсчетах, подвижная станция 4 активизирует или блокирует передатчик 232, как описано выше.
Предшествующее описание предпочтительных вариантов осуществления настоящего изобретения обеспечивает возможность специалистам в данной области техники осуществлять или использовать настоящее изобретение. Различные модификации к приведенным вариантам осуществления будут легко видимы для специалистов в данной области техники, и общие принципы, определенные здесь, могут быть применены к другим вариантам осуществления без использования изобретательских способностей. Таким образом, настоящее изобретение не ограничивается вариантами осуществления, рассмотренными здесь, а предоставляется для использования в самом широком объеме, согласующиеся с раскрытыми здесь принципами и новыми признаками.

Заявлены способ и устройство для управления потенциально стробированным каналом в системе радиосвязи. Подвижная станция поддерживает счетчик последовательных плохих кадров, СЧЕТ1, и счетчик последовательных хороших кадров, СЧЕТ2. В начале вызова СЧЕТ1 и СЧЕТ2 установлены в нулевое значение. Для каждого принятого кадра подвижная станция определяет, является этот кадр хорошим, плохим или пустым. Если принятый кадр является хорошим, то СЧЕТ1 сбрасывается в нулевое значение, а СЧЕТ2 увеличивается на 1. Если принятый кадр является плохим, то СЧЕТ1 увеличивается на 1, а СЧЕТ2 сбрасывается в нулевое значение. Если принятый кадр является пустым, то СЧЕТ1 и СЧЕТ2 не меняются. При достижении СЧЕТ1 порогового значения, ПОРОГ1, подвижная станция блокирует свой передатчик. соответственно, если СЧЕТ2 достигнет порогового значения, ПОРОГ2, то подвижная станция повторно активизирует свой передатчик. Технический результат заключается в создании нового улучшенного способа и устройства для управления потенциально стробированным каналом в системе радиосвязи. 6 н. и 7 з.п.ф-лы, 3 ил.
| ЖИДКАЯ ПИЩЕВАЯ КОМПОЗИЦИЯ И СПОСОБ СНИЖЕНИЯ АППЕТИТА У ЧЕЛОВЕКА | 2002 |
|
RU2313259C2 |

