Изобретение относится к области оптико-электронного приборостроения, конкретно к телевизионной микроскопии, и может быть использовано в криминалистике для проведения трассологических экспертиз пуль и гильз стрелкового оружия и создания банка данных пулегильзотек.
Известны устройства для получения изображений стреляных патронов, гильз и пуль (см. патенты Канады 2102319, М.кл. F 42 B 25/00, G 06 F 15/70, G 01 N 21/84, опубл. 20.01.2002; 2164369, М.кл. F 41 A 31/00, F 41 A 35/00, G 02 B 21/00, G 01 N 21/88, опубл. 20.01.2002; 2207454, М. кл. F 42 B 35/00, H 04 N 7/18, G 01 N 33/20, G 02 B 21/36, G 06 K 9/62, опубл. 20.01.2002; 2233507, М.кл. F 42 B 35/00, G 06 K 9/62, опубл. 20.01.2002).
Устройство по патенту Канады 2102319 анализирует и сравнивает поверхности стреляных пуль. Для этого полученное в микроскопе оптическое изображение (оптический сигнал) поверхности объекта усиливают, усиленный сигнал преобразуют в электрический сигнал, после чего осуществляют его цифровое кодирование. Полученный кодированный сигнал сохраняется в электронной памяти. В последующем накопленные коды различных изображений поверхности пуль могут сравниваться с кодами изображений поверхности других пуль для определения меры близости уже имеющихся изображений с новыми.
Устройство по патенту Канады 2164369 представляет собой портативный аппарат для получения изображений стреляных гильз, в частности дна гильзы и следа бойка (два фиксированных увеличения). Аппарат может быть использован в полевых условиях офицером полиции, и затем полученные изображения в цифровой электронной форме могут быть отправлены в криминалистический центр. В данном устройстве используется тот же принцип получения изображений, что и в предыдущем патенте. Отличия состоят в конструкции ящика аппарата, при открывании крышки которого аппарат готов к работе.
Устройство по патенту Канады 2207454 представляет собой аппарат, имеющий приспособление для крепления гильзы, выровненной вдоль ее продольной оси, с поверхностью капсюля, перпендикулярной к этой оси, микроскоп, смонтированный так, что его оптическая ось параллельна продольной оси гильзы, механизм фокусировки микроскопа для получения изображения следа давления бойка на поверхности капсюля, аксиально-симметричный источник света, установленный таким образом, чтобы поверхность капсюля с следом бойка была освещена симметричным относительно продольной оси светом. При этом полученное изображение дна гильзы и следа бойка может быть использовано для последующего сравнительного анализа исследуемой гильзы и других изображений, взятых из базы данных, независимо от угловой ориентации гильзы при ее установке в прибор. Основным отличием сравнительного анализа по данному патенту является то, что два сравниваемых изображения (исследуемое и из базы данных) поворачиваются относительно друг друга, и находится максимальное значение корреляционной функции близости первого и второго изображений.
Устройство по патенту Канады 2233507 является аппаратом для получения двух изображений следов на гильзах, полученных при ее диффузном освещении двумя раздельными источниками света под двумя различными заданными углами (либо одним источником света, поворачиваемым на заданный угол, либо на заданный угол поворачивается держатель гильзы вокруг продольной оси).
Используемый в двух последних патентах принцип вычисления функции взаимной корреляции для определения меры близости изображений исследуемого объекта и изображений, имеющихся в базе данных, требует больших затрат времени, при этом в анализе участвуют и неинформативные участки изображения, что повышает влияние шумов и ухудшает информативность оценок близости.
Кроме того, использование в патенте 2207454 симметричного освещения объекта приводит к ухудшению выявления особенностей и дефектов его поверхности. К дополнительному ухудшению оценок близости приводит также неизбежная некоторая потеря качества цифрового изображения при необходимом в данном случае повороте его на произвольный большой угол.
При этом во всех устройствах по патентам Канады не предусмотрено средств для предобработки фрагментов изображений, а без этого "сшитое" изображение поверхности объекта не пригодно ни для визуального, ни для компьютерного анализа.
В рассмотренных выше устройствах не предусмотрена также возможность сопоставления объектов по специально сформированным образам дефектов их поверхности.
Известны также устройства для получения изображения развертки поверхности деформированных цилиндрических объектов (см. патенты РФ 2155378, М.кл. G 06 K 9/60, G 06 T 3/20, G 06 T 7/60, G 01 B 21/88, опубл. 10.05.2001; 2166748, М. кл. G 01 N 21/88, G 01 B 11/30, опубл. 10.05.2001), которые, в частности, могут быть использованы в криминалистике для проведения баллистических экспертиз пуль стрелкового оружия, а также создания и хранения банка данных пулетек для последующей идентификации оружия по следам на пулях.
В обоих устройствах используются оптико-электронные средства для получения изображения. Изображение всей поверхности получается путем съемки серии изображений ее фрагментов. Причем каждый из них формируется в свою очередь из серии снимков, получаемых при перемещении снимаемого участка поверхности относительно съемочной системы на некоторые дискретные расстояния вдоль оптической оси этой системы. Наиболее резкие участки этих снимков и включаются в изображение фрагмента. Устройства содержат осветители, телекамеру с ПЗС-матрицей, датчик позиционирования объекта в исходное положение, объектодержатель, механизмы продольного перемещения, поворота объекта и фокусировочной подвижки, систему автофокусировки, АЦП и ЭВМ. При этом ПЗС-матрица снабжена приводом для вращения с шаговым двигателем и выполнена с возможностью ее вращения вокруг оси, лежащей в ее плоскости и параллельной оси исследуемого объекта.
Однако используемый в этих устройствах принцип многократной съемки одного и того же фрагмента изображения существенно усложняет и замедляет процесс съемки и технически не оправдан, поскольку аналогичный результат может быть получен путем уменьшения размеров снимаемых фрагментов.
Известно устройство для получения изображения развертки цилиндрических тел (см. патент РФ 2130628, М. кл. G 02 B 21/36, H 04 N 5/535, опубл. 20.05.1999), выбранное за прототип, содержащее осветители в виде пары попеременно включающихся малоинерционных широкоапертурных источников рассеянного света; объектодержатель в виде съемного узла, представляющего собой установленные соосно в общем корпусе, снабженном направляющими, поворотный столик с зубчатой полумуфтой и подпружиненный прижим с свободно вращающейся центрировочной зубчатой коронкой, причем на установочной поверхности столика нанесено рифление, а в полумуфте предусмотрено центрирующее отверстие для сопряжения с осью привода вращения объекта; механизмы продольного перемещения, поворота объекта и фокусировочной подвижки; систему автофокусировки, телевизионную камеру с ПЗС-матрицей, АЦП и ЭВМ. При этом привод фокусировочной подвижки снабжен датчиком позиционирования в исходное положение, а ПЗС-матрица установлена с возможностью поворота вокруг оси, лежащей в ее плоскости и параллельной оси исследуемого объекта, и снабжена приводом для вращения с шаговым электродвигателем. Кроме того, осветители объекта могут быть выполнены в виде пары светодиодных матриц с матовыми рассеивателями.
Такая конструкция устройства, по мнению заявителя, обеспечивает возможность записи в цифровом виде изображения развертки поверхности пуль, в том числе деформированных, с высокой разрешающей способностью и минимальными искажениями. Для этого телекамерой с ПЗС-матрицей при проецировании на поверхность объекта осветителем системы автофокусировки светового штриха определяют необходимость выполнения фокусировочной подвижки, выполняют ее; по величине дефокусировки вычисляют текущий радиус объекта и определяемую им ширину фрагмента, обеспечивая последующий синтез изображения развертки; определяют угол отклонения нормали к поверхности фрагмента от направления оси телекамеры, поворачивают на этот угол ПЗС-матрицу телекамеры. После выполнения всех этих операций включают по очереди основные осветители и производят съемку фрагмента при двух направлениях освещения. После этого позиционируют объект в новое положение и выполняют съемку следующего фрагмента. Изображения всех снятых фрагментов оцифровывают и записывают в память ЭВМ с возможностью последующего синтеза полной развертки.
Для осуществления в данном устройстве рассмотренного принципа получения изображения предложено использовать объектодержатель в виде съемного узла, выполнение которого требует очень высокой точности изготовления, и такой же точности изготовления привода вращения объекта. Такая точность может быть достигнута только индивидуальной подгонкой всех деталей этих узлов. Помимо высокой трудоемкости и стоимости такой работы, это делает все устройство в целом неремонтопригодным, т.к. замена съемного узла объектодержателя требует возврата всего изделия на производство для осуществления индивидуальной подгонки заменяемого узла. Кроме того, в устройстве предусмотрена сложная конструкция разворота ПЗС-матрицы телекамеры, что не только усложняет устройство в целом, но и сильно затрудняет "сшивку" фрагментов изображения, снятых при разных разворотах телекамеры. При этом разворот телекамеры предусмотрен только вокруг одной оси, что позволяет компенсировать наклон деформированной поверхности также только по одному из направлений; для исключения влияния наклона по другому направлению приходится все равно уменьшать размер снимаемого фрагмента. Однако выбор величины фрагмента, соответствующей ожидаемой степени деформации поверхности, позволяет и без поворота телекамеры обеспечить качественную съемку при упрощении конструкции, исключении операций измерения наклона и поворота матрицы. При этом суммарное время съемки не возрастает.
Следует отметить, что в данном устройстве, как и в рассмотренных выше устройствах, отсутствуют средства для предобработки изображений фрагментов, а без них "сшитое" изображение поверхности объекта не пригодно ни для визуального ни для компьютерного анализа. Во всех этих устройствах не предусмотрена также возможность сопоставления объектов по специально сформированным образам характерных дефектов поверхности, а только по корреляции всего изображения поверхности одного объекта с изображением другого.
Задачей изобретения является обеспечение возможности выявления меры близости исследуемых объектов по дефектам и другим локальным признакам, зафиксированным в изображениях их поверхностей, путем съемки, выполняемой в виде отдельных фрагментов, размеры которых выбраны в соответствии с ожидаемой величиной деформации поверхности, при сокращении времени и вычислительных ресурсов, затрачиваемых на выполнение данной задачи, и при одновременном упрощении конструкции устройства.
Решение указанной задачи достигается в устройстве для получения изображения развертки поверхности объектов, близких к плоскости или телу вращения, возможно деформированных, содержащем осветители, выполненные в виде малоинерционных источников рассеянного света, по меньшей мере, один объектодержатель, выполненный с возможностью сохранения неизменного положения объекта в нем в течение процесса получения полного изображения, механизмы продольного перемещения объекта и его поворота, систему автофокусировки с датчиком позиционирования объекта в исходное положение, по меньшей мере, одну съемочную систему, содержащую объектив и телевизионную камеру с ПЗС-матрицей, АЦП и ЭВМ, отличающемся тем, что в него введены блок управления, блок формирования цифрового изображения фрагмента, с выделением части телевизионного кадра, блок формирования полного изображения объекта, блок выделения информативных участков изображения объекта и формирования его информативных признаков, блок сравнения информативных признаков изображения объекта с информативными признаками объектов базы данных.
При этом система автофокусировки дополнительно содержит блок анализа качества фокусировки и электропривод с шаговым двигателем, механизмы продольного перемещения и поворота объекта снабжены шаговыми двигателями и средствами передачи усилия, причем вход блока анализа качества автофокусировки соединен с выходом телевизионной камеры, а выход этого блока через блок управления соединен с электроприводом системы автофокусировки, электроприводы шаговых двигателей механизмов продольного перемещения и поворота объекта через блок управления соединены с ЭВМ, блок формирования цифрового изображения фрагмента содержит помимо упомянутого выше АЦП электронную память на один кадр, вход которой соединен с выходом АЦП, и устройство выборки части кадра, вход которого соединен с выходом электронной памяти на один кадр.
Причем первый вход АЦП является первым входом блока формирования цифрового изображения фрагмента, второй его вход является входом синхронизации блока формирования цифрового изображения фрагмента, вход устройства выборки части кадра является вторым входом блока формирования цифрового изображения фрагмента, а выход устройства выборки части кадра - выходом блока формирования цифрового изображения фрагмента.
При этом первый вход блока формирования цифрового изображения фрагмента соединен с выходом телевизионной камеры, второй вход этого блока соединен с соответствующим выходом блока управления, а выход блока формирования цифрового изображения фрагмента подключен к входу блока формирования полного изображения, первый выход которого соединен с входом ввода данных в память ЭВМ, а второй выход этого блока соединен с входом блока выделения информативных участков изображения и формирования его информативных признаков, второй вход которого соединен с соответствующим выходом ЭВМ, а его выход подключен к входу ввода данных в память ЭВМ, вход и выход блока сравнения информативных признаков изображения объекта с информативными признаками изображений объектов базы данных соединен с соответствующими выходом и входом ЭВМ.
При этом объектодержатель устройства может быть выполнен съемным, что позволяет осуществлять съемку объектов различной формы.
Для улучшения точного позиционирования объекта относительно съемочной системы средства передачи усилия всех механизмов перемещения, выполнены в виде муфт, содержащих эластичные элементы.
Для сохранения постоянства коэффициента увеличения при фокусировке изображения объектив и телевизионная камера с ПЗС-матрицей съемочной системы могут быть установлены на одной платформе, связанной с платформой, на которой установлен объектодержатель через электропривод с шаговым двигателем системы автофокусировки.
Сохранение постоянства коэффициента увеличения при фокусировке можно также обеспечить установкой объектодержателя и объектива съемочной системы на одной платформе, связанной с платформой, на которой установлена телевизионная камера с ПЗС-матрицей, через электропривод с шаговым двигателем системы автофокусировки, при этом объектив выполняется с телецентрическим ходом лучей в пространствах предметов и изображений.
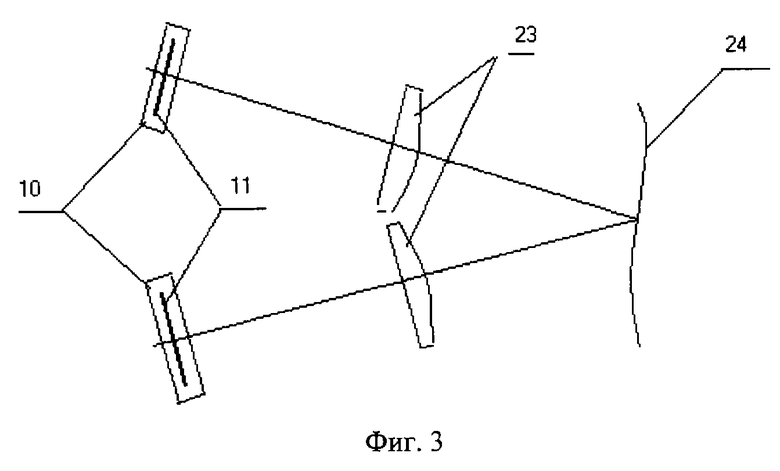
В устройстве может быть обеспечено получение стереопар изображения поверхности объекта для разделения дефектов поверхности, связанных с нарушением ее формы. Для этого оно содержит две съемочные системы, установленные под углом 5<α<15 друг другу, и таким образом, что их оптические оси пересекаются в одной точке поверхности объекта при условии фокусировки его изображения.
Для дополнительных удобств осуществления точной фокусировки в устройстве предусмотрено создание светового штриха на поверхности объекта, для чего система автофокусировки может содержать дополнительный осветитель с щелевой диафрагмой и объективом, при этом осветитель электрически соединен с соответствующим выходом блока управления.
Устройство может содержать одну съемочную систему для съемки изображения поверхности цилиндрических объектов и объектодержатель и вторую съемочную систему для съемки изображения поверхности плоских объектов и объектодержатель.
Устройство может содержать одну съемочную систему, обеспечивающую съемку изображения поверхности как плоских, так и цилиндрических объектов, и два съемных объектодержателя, в один из которых введен узел преобразования вращения объекта на его поступательное перемещение.
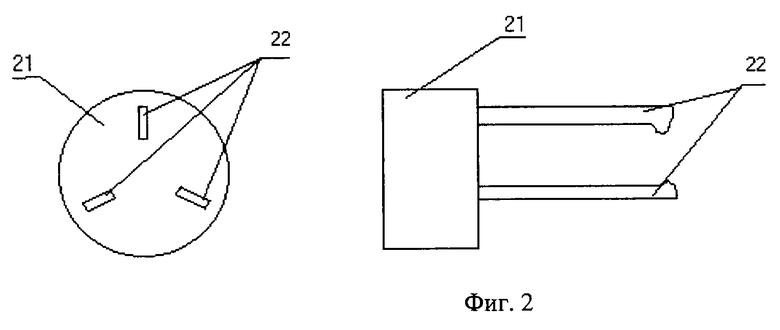
Для установки гильз с целью съемки изображения их дна объектодержатель может выполняться в виде цилиндрической детали, в которой консольно закреплены под углом 120 градусов друг к другу три пружины, имеющие клювообразной формы выступы вблизи их конца, которые входят в выемку вблизи дна гильзы.
Для исключения нарушения синхронизации опроса элементов ПЗС-матрицы телевизионной камеры и выходного сигнала АЦП второй вход АЦП блока формирования цифрового изображения фрагмента может быть соединен с выходом тактового сигнала ПЗС-матрицы телевизионной камеры.
Введенный в устройство блок формирования полного изображения в наиболее простом варианте его выполнения может содержать управляющее устройство и ОЗУ, причем вход управляющего устройства является входом блока, его выход подключен к входу ОЗУ, выход которого является вторым выходом блока.
Для исключения перепадов яркости на границах фрагментов изображения в блок формирования полного изображения может быть включено устройство выравнивания среднего уровня яркости всех фрагментов изображения, вход которого подключен к выходу ОЗУ, а его выход является первым выходом блока.
Для фильтрации шума и/или выравнивания средней яркости по фрагменту в блок формирования полного изображения может быть включено устройство предобработки каждого фрагмента изображения, вход которого является входом блока, а выход подключен к второму входу ОЗУ.
Покажем, каким образом введенные отличительные признаки предлагаемого устройства обеспечивают решение поставленной задачи.
Решение задачи идентификации объектов по микроскопическим деталям на их поверхности требует получения изображений с разрешением, недостижимым с возможностями телевизионных камер. Тем более невозможно получение полного детального изображения при деформированных поверхностях. Поэтому решение поставленной задачи сводилось, во-первых, к пофрагментному получению изображения, объединения всех фрагментов в полное изображение поверхности объекта и, во-вторых, такой обработке полученного изображения, которая позволяет обеспечить эффективную идентификацию объектов при экономии времени и вычислительных ресурсов.
Первая часть решения задачи осуществляется в предлагаемом устройстве точным позиционированием объекта относительно съемочной системы, что достигается применением механизмов продольного перемещения и поворота объекта с использованием шаговых двигателей и безлюфтовых средств передачи усилия (в частности, выполненных на основе муфт с эластичными элементами), работающих под воздействием управляющих сигналов от блока управления, который использует при выработке этих сигналов данные от введенного в устройство блока анализа качества фокусировки. При этом процесс автофокусировки может выполняться за несколько шагов, на каждом из которых блоком анализа качества фокусировки осуществляется оценка ее качества, и по достижении допустимого качества процесс завершается.
Для облегчения объединения в последующем всех фрагментов в полное изображение целесообразно обеспечить сохранение одинаковым масштаба изображения для всех фрагментов. Это может быть осуществлено либо тем, что при фокусировке объект перемещается относительно съемочной системы как целого, либо за счет применения в съемочной системе специального объектива с телецентрическим ходом лучей, который обеспечивает автоматически сохранение масштаба съемки.
Предлагаемое устройство может быть выполнено как с одной съемочной системой, обеспечивающей съемку объектов, по форме близких как к цилиндру, так и к плоскости, так и с раздельными съемочными системами, предназначенными для съемки одного из объектов - цилиндрического или плоского. В первом случае устройство может быть более компактным и соответственно несколько дешевле. Однако при этом необходимы съемные объектодержатели, в одном из которых должен дополнительно присутствовать узел преобразования вращения объекта на его поступательное перемещение. Во втором случае, за счет некоторого усложнения общей конструкции устройства, имеется возможность использования как съемных, так и несъемных объектодержателей, отпадает необходимость использования в объектодержателе узла преобразования вращения объекта на его поступательное перемещение, а также может быть применен специальный объектодержатель для цилиндрических гильз, обеспечивающий более простую и надежную их установку в устройство.
В устройстве может быть предусмотрена стереосъемка поверхности объектов. Последующая компьютерная обработка стереопар, получаемых ею, позволяет разделить дефекты поверхности, связанные с нарушением ее формы, в частности царапины и другие микронеровности, и нарушения однородности коэффициента отражения, связанные с возможными загрязнениями и другими случайными факторами. Такая дифференциация позволяет повысить правильность последующей идентификации исследуемых объектов.
Для достижения максимально высокой четкости получаемых изображений важно также избежать нарушения синхронизации опроса элементов ПЗС-матрицы телевизионной камеры и выходного сигнала АЦП, которое может возникнуть при взаимной синхронизации строчными импульсами телевизионной камеры. Поэтому предлагается вариант осуществления устройства с подачей на выход АЦП импульсов, формируемых задающим генератором телевизионной камеры, который одновременно формирует и тактовые импульсы опроса элементов ПЗС-матрицы телевизионной камеры.
Вторая часть решения поставленной задачи - эффективная идентификация исследуемых объектов при экономии времени и вычислительных ресурсов - обеспечивается введением в устройство блока формирования цифрового изображения фрагмента с выделением части телевизионного кадра, блока формирования полного изображения объекта с возможным введением в его состав устройства предобработки каждого фрагмента изображения до его записи в ОЗУ этого блока и устройства выравнивания среднего уровня яркости всех фрагментов изображения, а также блока выделения информативных участков изображения объекта и формирования его информативных признаков и блока сравнения информативных признаков изображения объекта с информативными признаками объектов базы данных.
Первые два из упомянутых блоков функционально обеспечивают получение высокодетального полного изображения объекта, которое, однако, неэффективно использовать в качестве основы для построения поисковой системы. Во-первых, это изображение содержит большую долю неинформативных признаков, что существенно ухудшает надежность сопоставления двух объектов, а во-вторых, непосредственное сравнение двух изображений поверхностей объектов требует значительного времени и вычислительных ресурсов. Поэтому в устройство введен блок выделения информативных участков изображения объекта и формирования его информативных признаков, который позволяет формировать значительно более простые, компактные и в то же время высокоинформативные признаки изображения каждого конкретного объекта, которые затем могут быть включены вместе с полным изображением поверхности объекта в базу данных. Именно эти информативные признаки являются в дальнейшем объектом сравнения, осуществляемым блоком сравнения информативных признаков изображения объекта с информативными признаками объектов базы данных. Например, для объекта - пули из нарезного оружия - такими признаками могут являться одномерные функции распределения яркости изображения, порожденные мелкими царапинами на ее поверхности. Ряд функций, выполняемых упомянутыми введенными блоками для эффективной идентификации исследуемых объектов, может быть возложен на ЭВМ, однако это увеличивает требования к ее памяти и быстродействию, а некоторые операции более эффективно выполняются спецпроцессорами, входящими в состав упомянутых блоков.
Предлагаемое устройство поясняется чертежами, где на фиг.1 приведен пример выполнения устройства в виде его функциональной схемы, на фиг.2 поясняется вариант выполнения объеектодержателя для установки гильз; на фиг.3 показан вариант выполнения устройства для получения стереоизображения.
Согласно фиг. 1 устройство содержит платформу 1, являющуюся конструктивной основой всего устройства, платформу 2, которая имеет возможность продольного перемещения вдоль платформы 1, и платформу 3, имеющую возможность перемещения в поперечном направлении относительно платформы 1. Платформа 2 является одновременно подвижным элементом системы автофокусировки и основанием системы крепления объектодержателя 5 и шагового двигателя 6 механизма поворота объекта. При этом платформа 2 соединена через устройство передачи усилия с шаговым двигателем 4 системы автофокусировки, закрепленным на платформе 1. На платформе 1 установлен также датчик 7 позиционирования объекта в исходное положение и закреплен шаговый двигатель 8 электропривода механизма продольного перемещения съемочной системы относительно объекта, связанный в свою очередь через устройство передачи усилия с платформой 3, которая является конструктивной основой съемочной системы, состоящей из объектива 9, телевизионной камеры 10 с ПЗС-матрицей 11. На съемочной системе жестко зафиксированы два осветителя 12 и осветитель 13 системы автофокусировки.
Устройство содержит также блок 14 управления, блок 15 анализа качества автофокусировки, ЭВМ 16, блок 17 формирования цифрового изображения фрагмента с выделением части телевизионного кадра, блок 18 формирования полного изображения объекта, блок 19 выделения информативных участков изображения объекта и формирования его информативных признаков, блок 20 сравнения информативных признаков изображения объекта с информативными признаками объектов базы данных.
При этом блок 15 анализа качества фокусировки соединен с выходом телевизионной камеры 10, а выход блока 15 через блок 14 управления соединен с шаговым двигателем 4 электропривода системы автофокусировки. Шаговые двигатели 8 и 6 механизмов продольного перемещения и поворота объекта соответственно соединены через блок 14 управления с ЭВМ 16, первый вход блока 17 формирования цифрового изображения фрагмента соединен с выходом телевизионной камеры 10, второй вход блока 17 соединен с соответствующим выходом блока 14 управления, а выход блока 17 подключен к входу блока 18 формирования полного изображения, первый выход которого соединен с входом ввода данных в память ЭВМ 16, а второй выход соединен с первым входом блока 19 выделения информативных участков изображения объекта и формирования его информативных признаков, второй вход блока 19 соединен с соответствующим выходом ЭВМ 16, а выход блока 19 подключен к входу ввода данных в память ЭВМ 16, вход и выход блока 20 сравнения информативных признаков изображения объекта с информативными признаками объектов базы данных соединены с соответствующими выходом и входом ЭВМ 16.
Для сохранения неизменного положения объекта во время съемки в объектодержателе 5 имеется поворотный столик с рифленой поверхностью и соосный с ним подпружиненный прижим.
Для сохранения постоянства коэффициента увеличения при фокусировке изображения последняя осуществляется перемещением объекта вместе с объектодержателем 5 относительно съемочной системы 3 как целого. При этом в съемочной системе 3 может быть использован объектив 9 любого типа. Кроме того, возможно обеспечить постоянство коэффициента увеличения при фокусировке с использованием объектива 9 с телецентрическим ходом лучей в пространстве предметов и пространстве изображений, при этом фокусировка может выполняться путем перемещения телевизионной камеры 10 относительно объектива 9. В этом случае сохранение постоянства масштаба обеспечивается самим ходом лучей в телецентрическом объективе.
Автофокусировка может выполняться путем вычисления в блоке 15 анализа качества фокусировки какой-либо функции резкости изображения, например среднего квадрата яркости изображения, и выработки сигнала управления электроприводом 4 механизма фокусировки. При этом несколькими последовательными шагами такого процесса добиваются максимизации функции резкости. Автофокусировка может выполняться также с использованием дополнительного осветителя 13 с щелевой диафрагмой и объективом, создающего световой штрих на поверхности объекта, положение которого анализируется в блоке 15 анализа качества фокусировки. При этом критерием фокусировки является некоторое заранее заданное положение светового штриха на поверхности объекта.
Устройство в целом может быть выполнено, как это показано на фиг.1, с одной съемочной системой как для съемки цилиндрических, так и плоских объектов. При этом необходимы два различных съемных объектодержателя 5 - один для съемки цилиндрических объектов с поворотным столиком и соосным с ним подпружиненным прижимом, и второй - для съемки плоских поверхностей объекта, устанавливаемый в то же место, в котором имеется узел преобразования вращения объекта на его поступательное перемещение, например зубчатые шестерня и рейка. Передача усилия от электропривода 6 на поворот объекта в съемном объектодержателе 5 может быть выполнена с помощью муфты с эластичными элементами. Последнее позволяет обеспечить высокую точность позиционирования объекта при относительно свободной системе допусков на выполнение конструкции. Такие же эластичные элементы могут быть использованы и в других устройствах передачи усилий от шаговых двигателей 4 и 8.
Другой вариант выполнения устройства предусматривает использование двух отдельных съемочных систем для съемки цилиндрических и плоских объектов. В этом случае объектодержатели 5 могут быть как съемными, так и несъемными, их конструкция упрощается, и улучшается точность позиционирования объектов, в частности, за счет устранения узла преобразования вращения объекта на его поступательное перемещение, а также прямой связи между объектом съемки и электроприводом механизма его перемещения. При этом объектодержатель для съемки плоских поверхностей (фиг.2), в частности дна гильз, может быть выполнен в виде цилиндрической детали 21, в которой консольно закреплены под углом 120 градусов друг к другу три пружины 22, имеющие клювообразной формы выступы вблизи их конца, которые входят в выемку вблизи дна гильзы. Такой объектодержатель обеспечивает более простое закрепление гильз при достаточно высокой точности их пространственной ориентации по отношению к системе съемки.
Для повышения вероятности правильной идентификации исследуемых объектов устройство может быть выполнено в варианте, показанном на фиг.3, в котором для обеспечения получения стереопар изображения поверхности объекта имеются две съемочные системы, установленные под углом 5<α<15 друг к другу, и таким образом, что их оптические оси пересекаются в одной точке поверхности объекта при условии фокусировки его изображения. При этом каждая из съемочных систем содержит телевизионную камеру 10 с ПЗС-матрицей 11 и объектив 23. Оптические оси обоих объективов 23 пересекаются в точке А на поверхности объекта 24.
Для осуществления высокой точности синхронизации опроса элементов ПЗС-матрицы 11 и формирования цифрового сигнала на выходе АЦП блока 17 в предлагаемом устройстве может быть реализована подача на выход АЦП импульсов, формируемых задающим генератором телевизионной камеры 10. Это исключает возможность нарушения синхронизации на уровне отдельных элементов изображения и обеспечивает получение его максимальной четкости.
Устройство предусматривает также возможность включения в блок 18 формирования полного изображения объекта устройства предобработки каждого фрагмента изображения, например для фильтрации шума и/или выравнивания средней яркости по фрагменту, что позволяет улучшить информативность изображения и облегчить формирование полного изображения объекта. В этом случае устройство предобработки каждого фрагмента изображения устанавливается на входе блока 18 формирования полного изображения объекта и осуществляет предобработку до записи фрагмента в ОЗУ этого блока.
Устройство предусматривает также возможность включения в блок 18 формирования полного изображения объекта устройства выравнивания средней яркости всех фрагментов изображения, которое позволяет исключить перепады яркости на границах фрагментов, улучшив, тем самым, визуальное восприятие изображения и облегчив формирование его информативных признаков. В этом случае устройство выравнивания средней яркости всех фрагментов устанавливается между ОЗУ и выходом блока 18 формирования полного изображения, обеспечивая запись откорректированного изображения в память ЭВМ 16.
Рассмотрим работу предлагаемого устройства с использованием фиг.1, 2 и 3.
Перед началом процесса съемки оператор устанавливает в объектодержатель 5 объект съемки, который затем позиционируется в исходное положение, и в автоматическом режиме выполняется фокусировка с помощью блока 15 анализа качества фокусировки и шагового двигателя 4 системы автофокусировки. При этом датчик 7 позиционирования объекта в исходное положение вырабатывает реперный сигнал системы фокусировки. Процесс съемки выполняется в пошаговом режиме, причем каждый шаг состоит из позиционирования объекта относительно съемочной системы с помощью шаговых двигателей 6 и 8 механизмов поворота объекта и его продольного перемещения, соответственно, автоматической фокусировки с помощью блока 15 анализа качества фокусировки и шагового двигателя 4 системы автофокусировки, съемки телевизионного кадра с помощью осветителей 12, объектива 9 и телевизионной камеры 10 с ПЗС-матрицей 11, передачи аналогового сигнала с выхода телевизионной камеры 10 на вход блока 17, в котором происходит формирование цифрового сигнала изображения и выделение из полного телевизионного кадра заданного фрагмента изображения. Далее цифровой сигнал заданного фрагмента изображения поступает с выхода блока 17 на вход блока 18 формирования полного изображения объекта, где производится его запись в соответствующую область ОЗУ этого блока. На этом шаг съемки заканчивается и такие шаги повторяются пока не будет записано полное цифровое изображение поверхности объекта в ОЗУ блока 18.
Вследствие неравномерных условий освещения различных частей неплоских объектов каждый фрагмент изображения может иметь различную среднюю яркость по площади фрагмента. Для выравнивания этой средней яркости в блок 18 формирования полного изображения объекта может быть включено устройство предобработки каждого фрагмента изображения, которое осуществляет эту функцию перед записью фрагмента в ОЗУ блока 18.
Однако даже после выравнивания средней яркости внутри каждого фрагмента изображения может сохраняться различие яркостей разных фрагментов, вызывающее резкие перепады яркости на границах фрагментов. Для устранения этого эффекта в блок 18 может быть включено устройство выравнивания средних яркостей всех фрагментов, образующих полное изображение объекта. Данная операция выполняется умножением всех значений яркости каждого фрагмента на выработанный процессором блока 18 цифровой коэффициент для соответствующего фрагмента. Причем можно произвести это умножение с перезаписью сигналов в ОЗУ блока 18 или в процессе передачи сигналов из блока 18 в ЭВМ 16. На этом собственно процесс съемки завершается.
Для выполнения задачи создания базы данных объектов и поиска в этой базе данных объектов, идентичных с исследуемым, предназначены блоки 19 и 20 совместно с ЭВМ 16. Блок 19 выделения информативных участков изображения объекта и формирования его информативных признаков выполняет следующие операции: анализирует участок за участком полное изображение поверхности объекта, хранящееся в ОЗУ блока 18, выделяя информативные участки изображения по свойствам их текстуры и/или характеристикам пространственно-частотного спектра; для каждого из выделенных участков формирует по заданному в его памяти алгоритму информационные признаки в виде набора цифровых значений и передает эти признаки вместе с координатами выделенных участков в ЭВМ 16 для записи этих характеристик объекта в базу данных. Блок 20 сравнения информативных признаков изображения объекта с информативными признаками объектов базы данных по алгоритмам, хранящимся в его памяти, производит сравнение информативных признаков исследуемого объекта с информативными признаками объектов из базы данных, вырабатывая числовые критерии близости этих объектов, позволяющие ЭВМ 16 сформировать выходную таблицу, ранжирующую объекты по мере близости их к исследуемому объекту.
Рассмотрим пример выполнения блоков устройства.
Использованные в предлагаемом устройстве механизмы продольного перемещения объекта и его поворота, а также механизм автофокусировки выполнены с использованием шаговых двигателей с числом шагов на оборот 200, например, типа Stepper motor 191-8299 (см. каталог фирмы "RS-Components", с.560).
В качестве основного объектива 9 системы съемки может быть использован объектив ОМ-12, производства ЛОМО.
В устройстве используется, например, бытовая телевизионная камера производства Samsung или Sony с черно-белой ПЗС-матрицей 2/3 дюйма производства тех же фирм.
В качестве основных осветителей 12 и осветителя системы автофокусировки 13 могут быть использованы светодиоды типа HLCPH100, 195041 (см. каталог фирмы "RS-Components", с.593).
Блок управления 14 устройства может быть построен с использованием управляющего процессора ADSP- 2105, программируемой логики ALTERA ЕРМ 7128STC100, и ключей ULN2803.
Блок 15 анализа качества фокусировки может быть построен на процессоре ADSP- 2186 и ОЗУ типа TMS 418169DZ. Процессор управляет приемом данных от телевизионной камеры 10, записью их в ОЗУ блока, вычислением функции резкости, например суммы квадратов всех значений, записанных в память ОЗУ, и передачей вычисленного значения функции резкости на вход процессора блока управления 14.
В качестве ЭВМ 16 используется, например, IBM - совместимая PC с процессором не ниже Pentium - 3 и ОЗУ не менее 256 Мб.
Блок 17 формирования цифрового изображения фрагмента с выделением части телевизионного кадра может быть построен на основе программируемой логики ALTERA EPF 10K, ОЗУ типа TMS - 418169 DZ и АЦП типа Bt 218КР20.
Блок 18 формирования полного изображения объекта может быть построен на процессоре типа ADSP 2187 и ОЗУ на сборке микросхем типа SPS6408B4E. Процессор блока, получая на вход размеры каждого фрагмента изображения, рассчитывает адрес ОЗУ, начиная с которого в него записываются цифровые значения яркости точек фрагмента, а также по получению от ЭВМ 16 сигнала об окончании процесса съемки и запроса на передачу полного изображения поверхности объекта в память ЭВМ обеспечивает передачу этого цифрового изображения в память ЭВМ.
В качестве блока 19 выделения информативных участков изображения объекта и формирования его информативных признаков и блока 20 сравнения информативных признаков изображения объекта с информативными признаками объектов базы данных могут быть использованы два процессора ADSP 2187.
Процессор блока 19 запрашивает из ОЗУ блока 18 поочередно заранее заданные массивы памяти, вычисляет их характеристики, например пространственно-частотный спектр с помощью БПФ (стандартной программы быстрого преобразования Фурье), сравнивает полученную характеристику с записанным в его память эталоном характеристики и при удовлетворительном результате сравнения вычисляет информативный признак данного участка изображения и передает его вместе с координатами участка в ЭВМ для записи в базу данных.
Процессор блока 20 получает из ЭВМ 16 информативный признак некоторого участка изображения исследуемого объекта в виде цифровой таблицы, запрашивает из базы данных ЭВМ 16 информативные признаки аналогичных участков изображений других объектов и вычисляет их меру близости, например значение функции их взаимной корреляции. Вычисленные значения передаются в ЭВМ 16 для определения интегральной оценки меры близости объектов.
Сведения об указанных микросхемах ADSP производства фирмы Analog Devices можно найти в сети Интернет на сайте www.analog. com., а о микросхемах фирмы ALTERA - на ее сайте в сети Интернет.
Изобретение относится к области оптико-электронного приборостроения, а конкретно к телевизионной микроскопии. Его применение в криминалистике для проведения трассологических экспертиз пуль и гильз стрелкового оружия позволяет получить технический результат в виде обеспечения возможности выявления меры близости исследуемых объектов по дефектам их поверхностей. Этот результат достигается благодаря тому, что в устройстве реализуется пофрагментное получение изображения и объединение всех фрагментов в полное изображение поверхности объекта с последующей его обработкой, что обеспечивается, в частности, посредством введения в устройство блока формирования полного изображения объекта, блока выделения информативных участков изображения объекта и формирования его информативных признаков и блока сравнения информативных признаков изображения объекта с информативными признаками объектов базы данных. 13 з.п. ф-лы, 3 ил.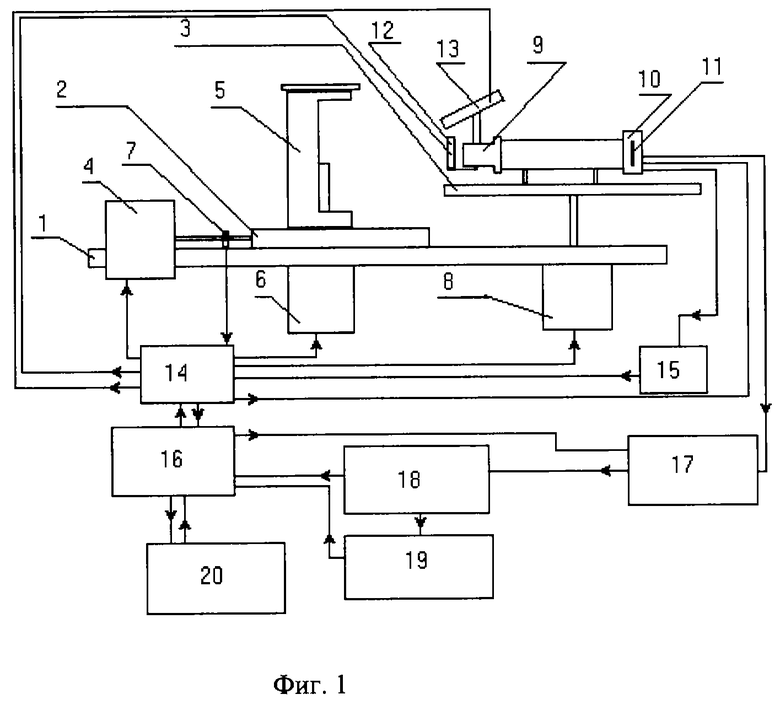
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ДОНЦА ПАТРОННЫХ ГИЛЬЗ ОГНЕСТРЕЛЬНОГО ОРУЖИЯ | 1999 |
|
RU2174251C2 |
| US 5390108 А, 14.02.1995 | |||
| DE 4103457 А1, 13.08.1992 | |||
| US 5685100 А,11.11.1997 | |||
| US 4923066 A, 08.05.1990. | |||

