Изобретение относится к фотограмметрии, конкретно - к цифровой фотограмметрии, и может быть использовано для проведения кадастровых съемок, крупномасштабных топографических съемок, маркшейдерских работ, проектно-изыскательских работ и мониторинга протяженных объектов, а также применено в других отраслях народного хозяйства.
Известны способы дистанционного зондирования поверхности путем съемки поверхности воздушно-подвесной системой, включающие установку транспортного средства со съемным устройством в заданной точке поверхности, подъем съемочного устройства на тросе необходимой высоты и плановую съемку поверхности (см. В. А. Варанесян. Радиоэлектронная разведка. - М.: Воениздат 1990, с. 230). Недостатком этих способов является то, что съемка осуществляется с фиксированной по высоте точки в плане поверхности. Это не позволяет повышать точность определения координат поверхности. Наиболее близким по технической сущности к предлагаемому способу является способ, включающий установку съемочного устройства над заданной точкой, плановую съемку поверхности, съемку поверхности, перемещение съемочного устройства по вертикали и обработку материалов съемки (см. патент RU 2087863, МПК 6 G 01 C 11/00, 1997 г.). Недостатком этого способа является то, что съемка опорных точек (маркировочных знаков) и поверхности осуществляется с одной и той же фиксированной по высоте точки в плане поверхности. Это не дает возможности осуществлять уверенную привязку к опорным (реперным) точкам, повышать точность определения координат поверхности и осуществлять калибровку съемочной аппаратуры.
Техническим результатом предлагаемого способа является повышение точности кадастровой и топографической съемки, улучшение условий для построения фототриангуляции на район работ, повышение экономичности и упрощение съемочных работ, автоматизация процессов обработки информации, возможность провести калибровку съемочной аппаратуры, оперативное решение задач.
Указанный технический результат достигается тем, что съемка ведется аэростатом со съемочной аппаратурой на нескольких уровнях по высоте в горизонтальном (сверху) плане, причем съемочные работы ведутся в два этапа, на первом этапе с высотной точки над участком выполняется плановая съемка заданного масштаба, на втором этапе аэростат со съемочной аппаратурой опускают на высоту съемки увеличенного масштаба, который обеспечивает уверенное распознавание реперной точки (точки с известными координатами) на цифровом снимке, и на этой высоте перемещают съемочное устройство в горизонтальной плоскости так, чтобы реперная точка попала в поле зрения съемочного устройства, и выполняют съемку реперной точки поверхности с повышенным разрешением относительно заданного масштаба съемки. Масштабирование снимков и привязка их друг к другу выполняется коррелятором программно в автоматическом режиме после дешифрирования реперной точки и ее индексации на растре снимка увеличенного масштаба. С целью калибровки съемочного устройства и повышения точности сети фототриангуляции формируют локальную повышенной точности сеть фототриангуляции с помощью съемки увеличенного масштаба с необходимыми продольными и поперечными перекрытиями цифровых снимков, покрывающих поверхность, включающую не менее трех реперных точек. После этого приступают к съемке следующего снимка стереопары заданного масштаба съемки.
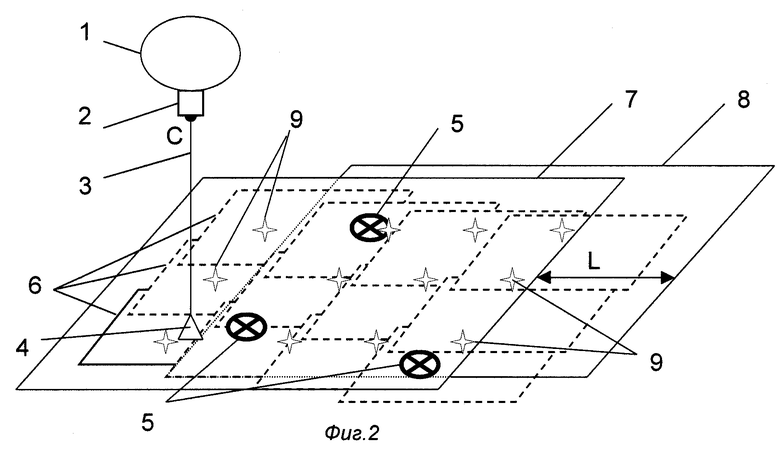
Сущность способа поясняется чертежами. На фиг.1 показана общая схема осуществления способа, на фиг.2 показана методика формирования локальной сети фототриангуляции. На фигурах обозначено: аэростат 1, съемочное устройство (цифровой фотоаппарат) 2, тросовая система 3, якорь с катушкой 4, реперная точка (например, колышек с известными координатами) 5, цифровой снимок увеличенного масштаба 6, цифровой снимок заданного масштаба съемки 7, второй цифровой снимок стереопары заданного масштаба съемки 8, опорные точки локальной сети фототриангуляции с известными координатами 9, точка для съемки снимка заданного масштаба А, точка на высоте, позволяющей выполнить съемку увеличенного масштаба и провести уверенное распознавание реперной точки на снимке В, точка, позволяющая выполнить съемку увеличенного масштаба и обеспечивающая попадание реперной точки в поле зрения съемочного устройства С, смещение второго снимка заданного масштаба относительно первого для формирования стереопары L.
Осуществляется способ следующим образом. В точке съемки (фиг.1) размещается комплект аппаратуры, состоящий из аэростата 1, съемочного устройства 2, троса 3, якоря и катушки 4. Аэростат 1 заполняется носителем и на тросе 3 поднимается вертикально вверх до высоты точки А, при которой цифровой снимок заданного масштаба 7 съемочным устройством 2 покрывает запланированный участок. После этого выполняют съемку запланированного участка. Затем аэростат 1 и съемочное устройство 2 опускают с помощью троса 3 и катушки 4 в точку В с высотой, позволяющей выполнить съемку увеличенного масштаба и обеспечивающей разрешение цифрового снимка для уверенного распознавания реперной точки 5. На этой высоте перемещают аэростат 1 и съемочное устройство в точку С, которая гарантирует попадание реперной точки 5 в поле зрения съемочного устройства 2. После этого выполняют съемку увеличенного масштаба цифрового снимка 6 участка с размещенной на нем реперной точкой 5. Затем перемещаются на расстояние L и выполняют съемку следующего снимка 8 для создания стереопары. Обработка данных съемки состоит в том, что на снимке 6 высокого разрешения опознают реперную точку 5 с точностью до пиксела. После этого опознанный на растре пиксел реперной точки 5 индексируют (например, окрашивая в экстремальный цвет) и выполняют масштабирование снимка 6 до масштаба снимка 7, сохраняя индексацию пиксела реперной точки 5. Далее привязка снимка 6 и снимка 7 друг к другу выполняется с помощью коррелятора программно в автоматическом режиме. В результате на растровом снимке 7 заданного масштаба появляется точно маркированный пиксел с реперной точкой 5. С целью калибровки съемочного устройства 2 и повышения точности сети фототриангуляции на запланированный участок заданного масштаба формируют локальную повышенной точности сеть фототриангуляции (фиг.2). Для этого съемкой увеличенного масштаба с необходимыми продольными и поперечными перекрытиями цифровых снимков 6 покрывают поверхность, включающую не менее трех реперных точек 5. Съемка увеличенного масштаба и локальная сеть фототриангуляции должны покрывать площадь снимка заданного масштаба 7. Обработка данных съемки состоит в том, что на снимках 6 высокого разрешения опознают реперные точки 5 с точностью до пиксела и строят локальную сеть фототриангуляции, покрывая поверхность снимка 7 плотной сеткой опорных точек с известными координатами 9. После этого опознанный на растре пиксел опорной точки 9 индексируют (например, окрашивая в экстремальный цвет) и выполняют масштабирование фрагмента растрового изображения, включающего опорную точку 9 до масштаба снимка 7, сохраняя индексацию пиксела опорной точки 9. Далее привязка фрагмента растрового изображения и снимка 7 друг к другу выполняется с помощью коррелятора программно в автоматическом режиме. В результате на растровом снимке 7 заданного масштаба появляется точно маркированный пиксел с опорной точкой 9.
С помощью полученных данных осуществляются кадастровые и крупномасштабные топографические съемки, маркшейдерские и проектно-изыскательские работы, мониторинг объектов. Наиболее эффективно применение способа для съемок масштабов в диапазоне 1:100 - 1:2000. Особенно высокая производительность работ достигается при съемках линейных объектов и небольших населенных пунктов.
Техническая осуществимость изобретения подтверждается широким применением способа в производственном процессе Закрытого акционерного общества "ЦКМ" и осуществляемого с помощью системы для крупномасштабной аэрофотосъемки. Базисная комплектация системы для крупномасштабной аэрофотосъемки включает: специализированное программное обеспечение, разработанное ЗАО "ЦКМ", гелиевый аэростат диаметром 155 см, цифровой фотоаппарат с полем зрения 2836•2132 пиксела, тросовую систему, якорь и катушку, автомобиль, ЭВМ.
Внедрение данного предложения по сравнению с базовым (2) дает возможность получить экономический эффект за счет повышения точности съемочных работ, более высокого уровня обработки информации и оперативного решения задач.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОЗДАНИЯ ПЛАНОВО-ВЫСОТНОГО ОБОСНОВАНИЯ | 1994 |
|
RU2104488C1 |
| Способ получения непрерывного стереоизображения земной поверхности с движущегося носителя | 2018 |
|
RU2686513C1 |
| СПОСОБ СОВЕРШЕНСТВОВАНИЯ ФОТОТРИАНГУЛЯЦИИ ПРИ СОЗДАНИИ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2023 |
|
RU2835990C2 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ С ДВИЖУЩЕГОСЯ НОСИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2498378C1 |
| СПОСОБ СОЗДАНИЯ ОРТОФОТОПЛАНОВ ПО МАТЕРИАЛАМ АЭРОВИДЕОСЪЕМКИ | 2002 |
|
RU2235292C2 |
| Способ обновления топографической карты, созданной по аэрофотоснимкам | 1990 |
|
SU1797689A3 |
| СПОСОБ ПОСТРОЕНИЯ КАРТЫ ЭКЗОГЕННЫХ ГЕОЛОГИЧЕСКИХ ПРОЦЕССОВ МЕСТНОСТИ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА | 2015 |
|
RU2591875C1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ПАРЫ СНИМКОВ | 2001 |
|
RU2177603C1 |
| Способ определения средней квадратической ошибки пространственных координат точек исследуемого объекта из обработки изображений, полученных разными съемочными камерами с произвольными значениями элементов ориентирования | 2019 |
|
RU2714525C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА ПЛОСКОСТИ АЭРОКОСМИЧЕСКОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 2015 |
|
RU2578270C1 |
Изобретение относится к фотограмметрии, а именно к цифровой фотограмметрии, и может быть использовано для проведения кадастровых съемок, крупномасштабных топографических съемок, маркшейдерских работ, проектно-изыскательских работ и мониторинга протяжных объектов, а также может быть применено в других отраслях народного хозяйства. Способ крупномасштабной аэрофотосъемки включает установку съемочного устройства над заданной точкой поверхности, плановую съемку поверхности заданного масштаба. Далее опускают съемочное устройство на высоту съемки увеличенного масштаба, обеспечивающую уверенное распознавание реперной точки на цифровом снимке. Перемещают съемочное устройство в горизонтальной плоскости так, чтобы реперная точка попала в поле зрения съемочного устройства. Выполняют съемку реперной точки поверхности. Затем перемещаются в следующую точку поверхности на расстояние, обеспечивающее необходимое перекрытие цифрового снимка заданного масштаба. Выполняют обработку материалов съемки. Технический результат состоит в повышении точности кадастровой и топографической съемки, улучшении условий для построения фототриангуляции на район работ, повышении экономичности и упрощении съемочных работ, автоматизации процессов обработки информации, возможности провести калибровку съемочной аппаратуры. 1 з.п. ф-лы, 2 ил.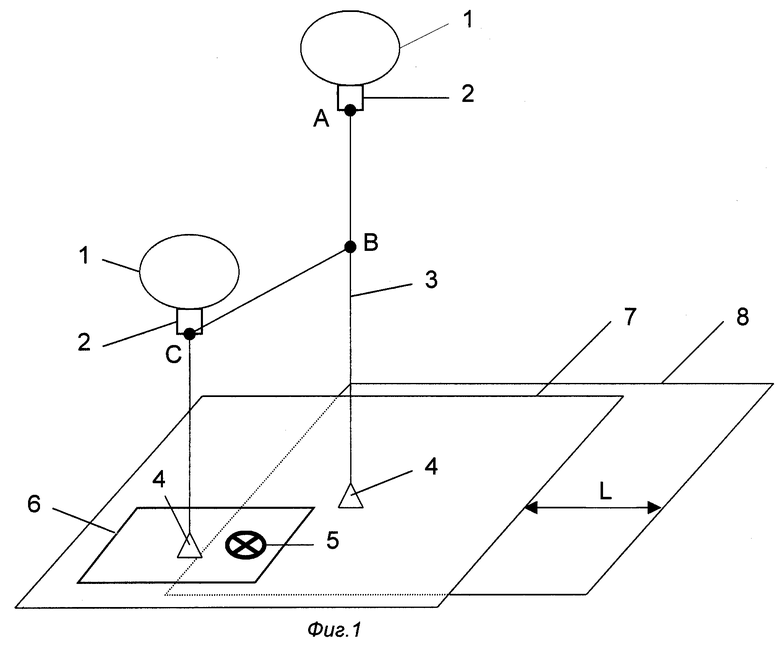
| СПОСОБ МАРКШЕЙДЕРСКОГО КОНТРОЛЯ ОТКРЫТЫХ ГОРНЫХ РАБОТ ПУТЕМ ТЕЛЕВИДЕОСЪЕМКИ | 1992 |
|
RU2087863C1 |
| СПОСОБ ПОЛУЧЕНИЯ КРУПНОМАСШТАБНОЙ КАРТЫ ПАРАМЕТРОВ МНОГОМЕРНОЙ СТРУКТУРЫ ПРИРОДНОЙ СРЕДЫ И АЭРОФОТОСЪЕМОЧНЫЙ САМОЛЕТ ДЛЯ ЕЕ ПОЛУЧЕНИЯ | 1990 |
|
RU2044273C1 |
| Способ изготовления фотопланов | 1961 |
|
SU147782A1 |
| Способ увеличения генерации тепловой энергии в теплоносителе | 2020 |
|
RU2726643C1 |
| СПОСОБ ПОЛУЧЕНИЯ ХЛЕБНОГО КВАСА | 2015 |
|
RU2587480C1 |

