Изобретение относится к измерительной технике, а конкретно к разработке конструкций электрических, механических и электромеханических датчиков и методике их закрепления на исследуемых (крепежных) объектах, преимущественно датчиков ускорения, выполненных на основе пьезокерамических биморфов консольного типа, и может быть использовано для измерения параметров детонаций в электронной системе управления двигателем автомобиля, а также вибраций в различных областях техники.
В технике известны и получили широкое распространение пьезокерамические датчики, в основу принципа работы которых положен прямой пьезоэффект - механическое воздействие на датчик вызывает реакцию в виде электрического сигнала. Конструкция таких датчиков предусматривает наличие одного или нескольких пьезоэлементов, механически и электрически соединенных между собой и закрепленных на опорных (крепежных) узлах устройства таким образом, чтобы наиболее эффективно реализовать возможность использования прямого пьезоэффекта, возникающего, в зависимости от назначения датчика, при изгибе, растяжении-сжатии, сдвиге и других видах воздействий, для получения электрического сигнала - реакции, несущего информацию о самом воздействии [1].
Известно, что наиболее важными характеристиками датчиков детонации являются ширина рабочего частотного диапазона и равномерность амплитудно-частотной характеристики. Ширина полосы пропускания датчика детонации в основном определяется величиной нижней резонансной частоты. Чем выше значение нижней резонансной частоты, тем шире рабочий частотный диапазон датчика.
При разработке и проектировании подобных датчиков стремятся получить на выходе датчика достаточно высокий уровень сигнала. Так, например, коэффициент преобразования ускорения в электрическое напряжение датчика детонации фирмы "BOSCH" составляет 25-30 мВ/g. В то же время для обеспечения широкого рабочего частотного диапазона необходимо обеспечить высокое значение нижней резонансной частоты. Так, например, для упомянутого датчика оно составляет 20-28 кГц. Т. е. в самой постановке задачи присутствует очевидное противоречие: с одной стороны необходимо увеличивать коэффициент преобразования ускорения, который, в свою очередь, убывает с ростом резонансной частоты.
Существующие современные тенденции к увеличению плотности компоновки узлов и элементов двигателя, приближающейся по плотности к компоновке узлов в самолетостроении, обуславливают необходимость к уменьшению габаритов не только механической схемы датчика, но и элементов его конструкции.
Помимо вышеперечисленных основных требований, конструкция датчика по возможности должна быть достаточно простой, технологичной и дешевой. Высокие требования к технологичности конструкции датчика обусловлены в первую очередь необходимостью обеспечения широкого рабочего диапазона. Вместе с тем, известно, что большое влияние на нижнюю резонансную частоту конструкции оказывает качество выполнения торцевых поверхностей сопрягаемых деталей. В этой связи сопрягаемые элементы, определяющие продольную жесткость конструкции, должны быть изготовлены с соблюдением высоких требований к неплоскостности и шероховатости. Удовлетворение этих требований существенно снижает технологичность и повышает стоимость изготовления датчика в целом.
Одной из задач, положенных в основу заявленного изобретения, является поиск оптимального решения, удовлетворяющего упомянутым выше, взаимоисключающим требованиям.
В известном уровне технике можно указать ряд технических решений, в которых задача создания датчика, оптимально сочетающего взаимоисключающие требования, решается путем выполнения основных элементов конструкции датчиков, характерные размеры которых связаны определенными соотношениями со свойствами материалов, из которых они выполнены.
Известен пьезоэлектрический виброизмерительный преобразователь, содержащий корпус, в основании которого выполнен кольцевой выступ, пакет пьезоэлементов, соединенных между собой и прикрепленных к основанию корпуса эластичным токопроводящим клеем, инерционный груз, размещенный на пакете пьезоэлементов. Основные конструктивные параметры преобразователя: высота основания ho, толщина пьезоэлементов h1, поперечный размер (диаметр) пьезоэлементов D, связаны с характеристиками материала элементов конструкции преобразователя: модулем упругости материала пьезоэлемента Е, модулем упругости материала клея Е1 и модулем упругости материала основания Еo следующим соотношением:
3ho•(Eo+E1)/2E+h1≤0,75 D.
При выполнении преобразователя с конструктивными размерами и свойством материалов его элементов в пределах полученного соотношения, обеспечивается при минимальных геометрических размерах повышенный уровень выходного сигнала, возникающего под воздействием продольных (осевых) колебаний, при одновременном снижении погрешности от поперечных (боковых) колебаний (патент РФ 2018134, МПК 5 G 01 Р 15/09, 1994 г.) [2].
Однако эта конструкция не позволяет в полной мере исключить погрешность, вносимую деформациями, возникающими при ее изготовлении.
Одним из существенных факторов, влияющих на стабильность основных характеристик пьезопреобразователей, является качество и стабильность используемого в конструкции преобразователя клеевого соединения.
Известен датчик детонации, содержащий соосно расположенные цилиндрические корпус с упругим основанием и опорный элемент, соединенный с основанием корпуса, стержневой электрический вывод с контактной пружиной, дисковый пьезоэлектрический элемент с нижним и верхним электродами, контактирующими соответственно с упругим основанием корпуса и с контактной пружиной стержневого электрического вывода, и заглушку. На упругом основании корпуса выполнены вертикальные радиальные выступы, на которые опирается упомянутый дисковый пьезоэлектрический элемент. Радиальные выступы обеспечивают получение оптимальных параметров клеевого соединения пьезоэлемента с основанием и осуществление электрического контакта нижнего электрода пьезоэлектрического элемента с корпусом (патент США 4393688, н. кл.73-35, МПК G 01 L 23/22, 1983 г.) [3].
Несмотря на то, что в упомянутом техническом решении устранен ряд недостатков, присущих известному уровню техники, все таки зависимость технических характеристик датчика от качества и стабильности клеевого соединения в значительной мере сохранилась.
Известен также датчик детонации, содержащий соосно расположенные цилиндрический корпус с упругим основанием и опорный элемент, соединенный с основанием корпуса, стержневой электрический вывод с контактной пружиной, дисковый пьезоэлектрический элемент с нижним и верхним электродами, один из которых контактирует с упругим основанием корпуса, заглушку и прижимной узел в виде тарельчатой пружины с центральным отверстием, при этом внешние края тарельчатой пружины контактируют с периферией дискового пьезоэлектрического элемента, изолированной от верхнего электрода, а внутренняя - с заглушкой, причем дисковый пьезоэлектрический элемент вторым электродом соединен с контактной пружиной стержневого электрического вывода через центральное отверстие тарельчатой пружины. Кроме того, в упругом основании корпуса и верхней части опорного элемента выполнено глухое центральное отверстие или кольцевая проточка, диаметр которых d и их глубина h связаны с диаметром D опорного элемента и толщиной S упругого основания корпуса следующим соотношением:
(0,7....l,4)/h=D-d= (1,4...2,8)S.
Такое конструктивное решение позволяет обеспечить стабильность основных технических характеристик датчика без применения в его конструкции клеевого соединения пьезоэлектрического элемента с основанием (патент РФ 2106643, МПК 6 G 01 P 15/09, 1998 г.) [4].
В данной конструкции удалось исключить погрешности, связанные с клеевым соединением, однако погрешности, обусловленные закреплением датчика на объекте, сохранились.
Известен также пьезоэлектрический виброизмерительный преобразователь, содержащий основание и укрепленный на нем пьезоэлемент, при этом высота основания h1 преобразователя, поперечный размер D пьезоэлемента и параметры, характеризующие свойства материала элементов преобразователя, связаны соотношением:
0,2En/EoD≤h1≤0,4En/EoD,
а высота h2 пьезоэлемента равна
h2=4/3 D-3h1Eo/En,
где En - модуль упругости материала пьезоэлемента;
Ео - модуль упругости материала основания.
Выполнение элементов конструкции преобразователя, с учетом полученных соотношений, позволило оптимизировать размеры преобразователя и разместить пьезоэлемент в зоне поверхности нулевой деформации. Это, в свою очередь, обеспечило повышение эффективности преобразователя как за счет повышения его резонансной частоты и расширения диапазона рабочих частот, так и за счет увеличения коэффициента преобразования (авторское свидетельство СССР 1205028, МПК 4 G 01 Р 15/09, 1983 г.) [5].
В данном преобразователе также частично устранены недостатки, присущие известному уровню техники. Однако, в связи с тем, что при получении приведенных зависимостей исходили из условий плосконапряженного состояния преобразователя при воздействии деформаций объекта, учесть в полной мере возникающие при этом погрешности, обусловленные реальным состоянием преобразователя, не представляется возможным.
В известных преобразователях [2-5] удалось обеспечить оптимальное сочетание взаимно исключающих требований. Однако в целом конструкции этих датчиков достаточно сложны, обеспечение технологичности таких конструкций существенно удорожает стоимость датчиков. Кроме этого, и что наиболее важно, упомянутые конструкции датчиков при многосерийном производстве не обеспечивают повторяемости их основных параметров от датчика к датчику.
В этой связи, наибольшее распространение для измерения вибраций, преимущественно транспортных средств, получили датчики, упомянутые выше, описанные в [1]. К основному недостатку таких датчиков следует отнести чувствительность пьезоэлементов к способу их механического соединения (крепления), как между собой и элементами конструкции датчика, так и чувствительность самих датчиков к способу их механического соединения (закрепления) с элементами конструкции исследуемого (контролируемого) объекта. Это в свою очередь приводит к изменению, зачастую неконтролируемому, эффективных параметров самого датчика, например к неконтролируемому изменению его коэффициента преобразования или его входной емкости. Последнее имеет простое физическое объяснение. Деформация опорных или крепежных конструкций датчика, необходимая при его закреплении на исследуемом (контролируемом) объекте, неизбежно передается чувствительным частям конструкции - мембранам, иглам и т.д., а также непосредственно самим пьезоэлементам. Эта деформация меняет их механические свойства, как, например, изменение упругих свойств струны гитары, путем ее дополнительного натяжения, изменяет тональность ее звучания.
При воздействии на пьезоэлементы, подобная деформация приводит к более сложным последствиям, включая изменения электрических и пьезоэлектрических свойств, помимо механических. Так, например, приклеивание пьезоэлемента из ЦТС-19, габаритами ⊘7,1•0,15 мм к металлической мембране, приводит к изменению их электрической емкости (в сторону ее уменьшения) более чем на 15%, что установлено авторами экспериментально в ходе разработки пьезоэлектрических преобразователей. Это объясняется тем, что величина диэлектрической проницаемости ЦТС-19 практически в два раза отличается в зависимости от того, является ли пьезоэлемент абсолютно свободным механически или абсолютно зажатым [6]. Приклеивание пьезоэлемента к мембране создает эффект "частичного" зажатия, что и приводит к некоторому изменению его емкости.
Наиболее широко известным пьезоэлектрическим датчиком ускорения биморфного типа, достаточно эффективным и чувствительным, является консольный биморф, используемый в звукоснимателях в качестве чувствительного элемента [7] . Упомянутый биморф консольного типа жестко закреплен одним концом на твердом основании и соединен другим концом с иглой звукоснимателя.
Датчик работает следующим образом. При вращении грампластинки, игла подвергается механическому воздействию со стороны неровностей двигающейся дорожки, в которой она находится. Практически это полный аналог датчика неровности дороги, размещенного на движущемся автомобиле. Силовое воздействие неровностей на иглу, пропорциональное ее ускорению, передается биморфу. Это, вследствие прямого пьезоэффекта, вызывает появление на электродах биморфа электрического сигнала, пропорционального ускорению иглы.
Для данной конструкции также имеют место неконтролируемые изменения параметров датчика ускорения (звукоснимателя), вызванные неконтролируемыми деформациями при его сборке и креплении. Однако эти погрешности сводятся к практически несущественным, вследствие проведения следующих мероприятий:
- отработки серийной технологии сборки датчиков, обеспечивающей высокую повторяемость их параметров и их монтаж с минимальной деформацией в крепежных узлах и конструкциях, допустимых в работе в стационарных условиях (в комнате, при неподвижном размещении радиоустройства);
- остаточное, неконтролируемое изменение параметров датчика легко компенсируется индивидуальными регулировками (громкости, тембра).
Отсутствие герметичности делает такой датчик принципиально непригодным для использования в климатических условиях транспортных магистралей. Герметизация же датчика приводит к дополнительным деформациям, приводящим к неконтролируемым изменениям параметров датчика (см. табл.2 прилагаемого протокола).
Недопустимость сильных механических деформаций при креплении на исследуемом объекте, неизбежных при надежном закреплении датчика на транспортном средстве, предназначенном для передвижения в условиях транспортных магистралей.
Необходимость индивидуальной подстройки электронных блоков (усиление, тембр) в ходе работы, исключающая высокую серийноспособность датчиков ускорения специального назначения, например датчиков неровности дороги, размещаемых на автомобилях и других транспортных средствах, движущихся в условиях транспортных магистралей.
Основными техническими требованиями, предъявляемыми к датчикам ускорения, используемых в качестве датчиков неровности дороги и размещаемых на транспортных средствах, являются [8]:
- высокий уровень герметичности;
- минимальные габариты;
- независимость параметров датчика от способов и условий его крепления на различных участках корпуса автомобиля (транспортного средства) как исследуемого объекта.
Сложившаяся в результате многолетних исследований и разработок конструкция датчика ускорения (неровности дороги) содержит достаточно массивное металлическое основание, жестко прикрепляемое (например, винтовыми соединениями) к корпусу автомобиля, содержащее закрепленную на нем, например, посредством клея плату с электронными блоками и жестко закрепленный на нем пьезокерамический датчик ускорения биморфного типа, например, в виде консоли, а также герметичные выводы и крышку, обеспечивающую герметизацию всех упомянутых элементов датчика [8].
Далее, в описании под пьезоэлектрическим датчикам ускорения будем понимать непосредственно пассивный чувствительный элемент биморфного типа, в частности, консольного варианта исполнения, а под датчиком неровности дороги - вышеописанную конструкцию, составной частью которой является датчик ускорения.
Известна также конструкция датчика ускорения, содержащая основание минимальной площади, позволяющей создать консольную конструкцию с содержащимся биморфом и свести к минимуму передачу деформаций корпуса, к которому прикрепляется основание к биморфу, сведя к минимуму неконтролируемые изменения коэффициента преобразования К, а также выводы, одним из которых является основание, а другим - проводник [8-9].
К недостаткам упомянутой конструкции датчика следует отнести трудности создания надежного теплоотвода от основания, при его закреплении на корпусе датчика неровности дороги путем пайки. А также трудности самой пайки и трудности контроля параметров датчика при его закреплении в измерительных устройствах (на вибростенде, при измерении электрических параметров, при проведении различных испытаний). Кроме того, сохраняется остаточная деформация, приходящаяся на площадь основания, которая уже не может быть уменьшена без потерь эффективности конструкции (нарушение условий, при которых биморф и основание образуют консоль).
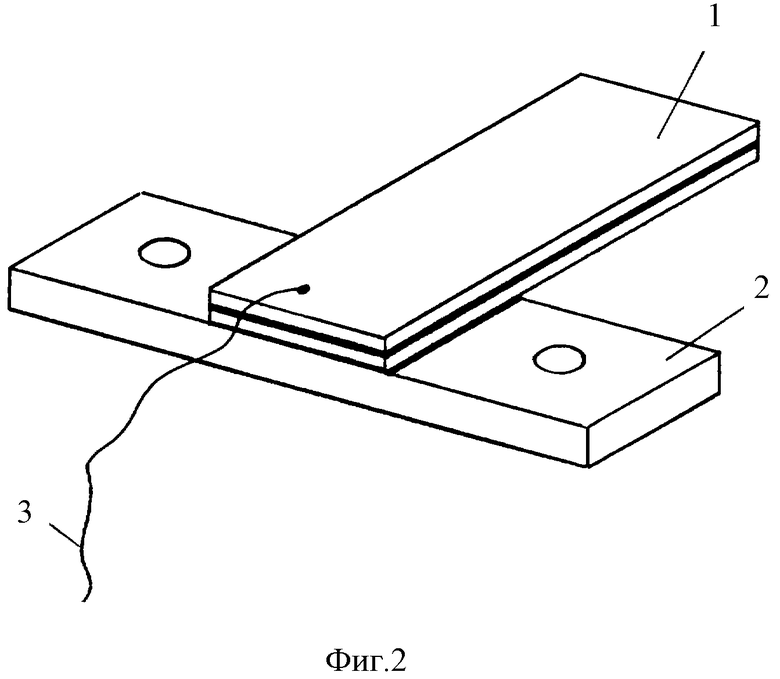
Наиболее близким к заявленному изобретению по технической сущности и достигаемому при использовании результату является пьезоэлектрический датчик ускорений (фиг.2), содержащий размещенные в герметичном корпусе (на фиг.2 не показан) пьезокерамический биморф 1, жестко соединенный с проводящим, металлическим (латунным) основанием 2 путем пайки или склеивания, обеспечивающих помимо жесткого механического и электрический контакт, и выводы электрического сигнала, одним из которых является проводящее основание 2, а другим - проводник 3. Крепление датчика ускорения к металлическому основанию конструкции датчика неровности дороги осуществляется путем пайки, приклеивания или винтового соединения [10].
Поскольку его конструкция практически идентична двум конструкциям датчиков, представленным выше, основные недостатки прототипа также аналогичны упомянутым выше недостаткам.
Как отмечалось выше, пьезоэлектрические чувствительные элементы могут закрепляться посредством пайки, клея, винтового соединения и т.д. в посадочных местах датчика, например, в нашем случае, датчика неровности дороги. При этом неизбежно возникают первичные деформации, обусловленные креплением чувствительного элемента. Сам датчик неровности дороги размещают на контролируемом объекте аналогичным способом. При этом также неизбежно возникают новые деформации, которые через крепежные элементы передаются чувствительному элементу в виде вторичных деформаций. Чем жестче условия работы датчика неровностей дороги, тем жестче и условия крепления.
Известно, что датчик неровности дороги работает на автомобиле в условиях вибраций, ударов, жестких климатических воздействий. В таких условиях работы влияние крепления и герметизации датчика неровности дороги могут достигать предельных величин, вплоть до необратимой деформации отдельных крепежных узлов. Эти деформации передаются сложным или простым механическим путем пьезоэлементам, что приводит к увеличению разброса их основных параметров, а следовательно, и основных параметров самого датчика неровностей дороги, в ряде случаев в пределах, превышающих допустимые. На уменьшение влияния этих факторов на разброс параметров, на снижение этого разброса и направлено заявленное техническое решение.
Рассмотрим консольный пьезокерамический биморфный чувствительный элемент, в виде протяженной полоски, закрепленной на металлическом основании, а конкретно на его части, которую назовем основной. Ее особенности заключаются в том, что площадь поверхности крепления биморфа должна быть по возможности минимальной, а высота - максимально допустимая, позволяющая снизить влияние первичных и вторичных, упомянутых выше, деформаций. Однако только эти меры очень часто оказываются недостаточными при неизбежно больших деформациях, как, например, при изготовлении и закреплении на автомобиле датчика неровности дороги. Кроме того, как отмечалось ранее, эти меры усложняют технологию производства чувствительных элементов, контроль их параметров при изготовлении, что в условиях крупномасштабного производства имеет большое значение.
Если основание выполнить из двух частей - основной, как отмечалось выше, и периферийной, то влияние внешних деформаций можно уменьшить еще более существенно. Для этого периферийная часть основания должна быть жестко связана с основной, нести на себе крепежные функции, вместе с ней быть достаточно жесткой для малых механических напряжений, возникающих при воздействии измеряемых ускорений, и становиться податливой, вплоть до пластических деформаций, при больших механических (статических) напряжениях, не передавая их (деформации) основной части. Такое возможно, если в месте соединения периферийной и основной частей основания соблюдаются условия, при которых одно и то же большое крепежное (статическое) воздействие приводит к большой деформации периферийной части и малой деформации основной части. При упрощенном анализе выявленного эффекта это можно показать на упрощенной модели основания, показанной на фиг.1. При деформации изгиба величиной "а" (фиг.1б) периферийной части, основная часть основания практически не деформируется, поскольку ее высота "Н" много больше высоты "h" периферийной части, а выполнены они из одного материала, как одно целое. Из фиг.1б видно, что периферийная часть основания может даже деформироваться пластически, не линейно, в то время как такая деформация не приводит к большим деформациям основной части.
Аналогично можно провести анализ и для других видов деформации (кручения, сдвига, растяжения-сжатия), причем все реальные ситуации могут быть в первом приближении представлены простыми моделями, подобно модели, показанной на фиг.1, с эффективными величинами (характерными размерами) Н, h, диаметрами и т.д. Длина основания периферийной части в первом приближении не принимается во внимание, однако при возникновении пластических деформаций, ее следует учитывать, моделируя оптимальные размеры основной и периферийной частей основания.
Задача, положенная в основу настоящего изобретения, заключается в создании датчика ускорения, преимущественно транспортных средств, свободного от перечисленных выше недостатков, присущих известному уровню техники. Т.е. создать датчик ускорений, в котором существенно снижено влияние механических деформаций, вызванных последовательностью жестких закреплений, на разброс основных параметров датчика.
Технический результат, достигаемый при использовании заявленного изобретения, заключается в создании датчика ускорения, обеспечивающего при минимальных геометрических размерах его основных элементов, расширение частотного диапазона, увеличение уровня выходного сигнала, обеспечение повторяемости основных характеристик датчика в условиях широкомасштабного серийного производства, повышение технологичности конструкции датчика и снижение его себестоимости.
Задача, положенная в основу настоящего изобретения, с достижением упомянутого выше технического результата решается тем, что в известном пьезоэлектрическом датчике ускорения, содержащем биморфный чувствительный элемент, жестко закрепленный на твердом основании с токовыводами, твердое основание выполнено из жестко соединенных друг с другом двух частей: основной, на которой закреплен биморфный чувствительный элемент с токовыводами, и периферийной, при этом площадь сечения периферийной части выполнена меньше площади сечения основной части в месте их соединения, а конечные участки периферийной части являются местами крепления датчика;
- а также тем, что периферийная часть основания выполнена в виде пластины, высота которой, по крайней мере, не менее чем в два раза меньше высоты основной части основания;
- а также тем, что периферийная часть основания выполнена в виде стержня, высота и ширина которого выполнены меньше высоты и ширины основной части основания;
- а также тем, что стержень выполнен S-образной формы;
- а также тем, что основная часть основания выполнена в виде прямоугольной призмы или в виде цилиндра;
- а также тем, что основание выполнено как одно целое;
- а также тем, что основание выполнено из латуни.
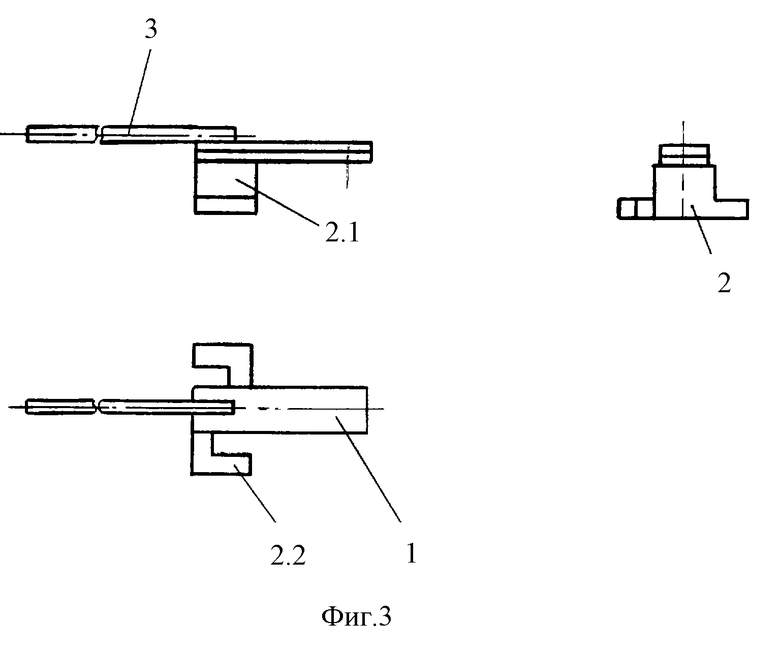
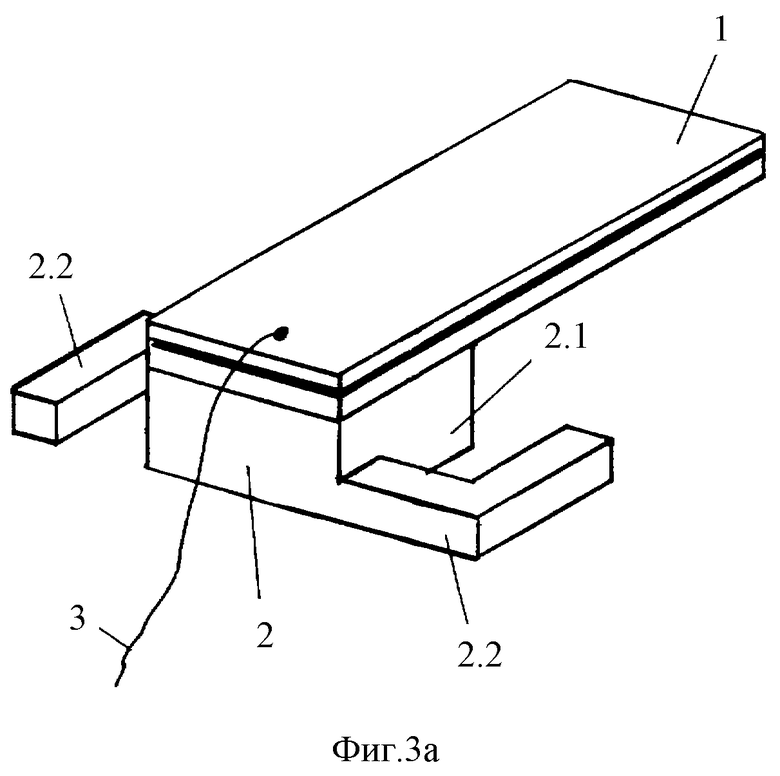
Изобретение иллюстрируется графическим материалом, на котором на фиг.1 показана модель деформации основания датчика, в процессе воздействия на него напряжений, возникающих при креплении датчика; на фиг.2 представлено техническое решение, выбранное в качестве прототипа, а на фиг.3 и 3а показаны особенности конструкции заявленного изобретения.
Пьезоэлектрический датчик ускорений, в соответствии с заявленным изобретением (фиг 3 и 3а), содержит размещенные в герметичном корпусе (на фиг.3 и 3а не показан) пьезокерамический биморф 1, который жестко соединен с основанием 2, выполненным из проводящего металлического материала (например, латуни) путем пайки или склеивания, обеспечивающих помимо жесткого механического и электрический контакт, и выводы электрического сигнала, одним из которых является упомянутое проводящее основание 2, а другим - проводник 3. Крепление датчика ускорения к металлическому основанию конструкции датчика неровности дороги осуществляется путем пайки, приклеивания или винтового соединения.
Датчик работает следующим образом. При воздействии ускорения, перпендикулярного плоскости биморфа 1, происходит его деформация в виде изгиба (как консоли), в результате чего возникает разность потенциалов "U" на выводах датчика 2, 3, пропорциональная величине воздействующего ускорения "а", с точностью до коэффициента преобразования "к":
U=к•a.
Величина "U" при известном постоянном "К" несет информацию об ускорении "а", возникающем, в частности, при езде по неровной дороге на ухабах. Величина "К" зависит от особенностей конструкции датчика ускорения и физических констант материалов, использованных для изготовления основных элементов, составляющих эту конструкцию, а также от неконтролируемых, паразитных деформаций, передаваемых через основание собственно биморфу, возникающих при сборке, герметизации, креплении датчика неровности дороги к корпусу автомобиля.
Перечисленные факторы приводят к снижению повторяемости параметров датчиков, как при их изготовлении, так и при их монтаже (закреплении) на транспортных средствах (автомобилях), а также снижает стабильность их характеристик в условиях внешних воздействий.
Для уменьшения влияния деформации корпуса датчика неровности дороги на величину "К" датчика ускорения, его основание, а точнее площадь соприкосновения основания с корпусом уменьшают до минимально возможной величины.
Эти недостатки устраняются тем, что конструкция основания 2 выполнена в виде двух частей, основной 2.1 - утолщенной или возвышенной, на которой закреплен биморф, и периферийной 2.2, причем периферийная часть 2.2 имеет меньшее сечение, чем основная 2.1 в месте их соединения (сочленения), а граничные участки периферийной части 2.2 являются зонами крепления датчика.
В основу особенностей конструкции заявляемого изобретения положены следующие основные принципы механики деформируемых тел:
- деформация кручения круглого стержня обратно пропорциональна четвертой степени его радиуса [11];
- деформация изгиба консоли обратно пропорциональна кубу ее толщины [12] .
Как отмечалось выше, все возможные варианты выполнения конструкции датчика в соответствии с заявляемым изобретением, содержащим основание, выполненное из двух частей: основной и периферийной, могут быть сведены расчетно-экспериментальным путем, в зависимости от доминирующего вида (или видов) деформации, к одной из нескольких упрощенных конструкций, поддающихся расчету и анализу. Геометрические размеры такой конструкции принято называть эффективными. Пример такой модели приведен на фиг.1. В этом случае соотношение геометрических размеров основной 2.1 и периферийной частей 2.2, например, высот "Н" и "h" таково, что периферийная часть 2.2, при закреплении датчика по участкам "А", более податлива, чем основная часть 2.1. Этот эффект проявляется тем сильнее, чем строже выполняется соотношение "Н">"h", и практически отсутствует при соотношении "Н"="h". Расстояние "L" от места соединения периферийной части 2.2 с основной частью 2.1 основания 2 до места крепления должно быть при этом достаточно большим и составлять величину, превышающую "h" более чем в несколько раз. В произвольном случае реальной геометрии периферийной части 2.2, величина "h" определяется максимальной хордой, соединяющей участки замкнутого контура, охватывающего сечение периферийной части 2.2 в месте ее соединения с основной частью 2.1 в направлении воздействия.
Не прибегая к детальному анализу всех видов деформации, ее зависимости от других размеров (ширины консоли, длины) и сложному анализу произвольной формы сечения деформируемого тела (во избежание загромождения описания сложными математическими выкладками), можно утверждать, что в соответствии с полученными зависимостями, деформация уменьшается с ростом площади сечения и увеличивается с ростом длины. В этом случае, при переходе от периферийной части 2.2 основания 2 датчика, имеющей меньшее сечение, к основной части 2.1, имеющей большее сечение, деформация уменьшается, уменьшается и механическое напряжение. При этом деформация периферийной части 2.2 может быть даже необратимой, в то время как деформация основной части 2.1 может быть сделана сколь угодно малой.
В соответствии с изложенным, в предлагаемой конструкции датчика ускорения, периферийная часть 2.2 основания выполнялась в виде пластины, толщина которой была выбрана меньше высоты, а ширина равнялась ширине основной части основания датчика.
С целью дальнейшего снижения влияния паразитных механических воздействий на параметры датчика, уменьшалось сечение периферийной части 2.2 за счет уменьшения ее ширины, т. е. периферийная часть 2.2 приближалась по форме к стержню.
Для уменьшения габаритов датчика, стержень может быть выполнен S-образной формы. Основная часть 2.1 основания 2 может быть выполнена виде прямоугольной призмы, или в виде цилиндра.
В результате практической реализации полученных соотношений и проведенных испытаний, оптимальный вариант конструкций датчика содержит (фиг 3 и 3а) основание 2, выполненное как одно целое, например, из латуни. Чувствительный элемент 1 выполнен в виде пьезокерамического биморфа - консоли, причем высота основной части 2.1 основания 2 более чем в 2 раза превышает толщину периферийной части 2.2. Датчик ускорения крепился на корпусе датчика неровности дороги путем пайки к боковым поверхностям "А" периферийной части 2.1 основания 2.
При воздействии ускорения перпендикулярно большим плоскостям поверхности биморфа 1 возникает его изгиб как консоли, что приводит к появлению на электродах 1,3 разности потенциалов, вследствие прямого пьезоэффекта.
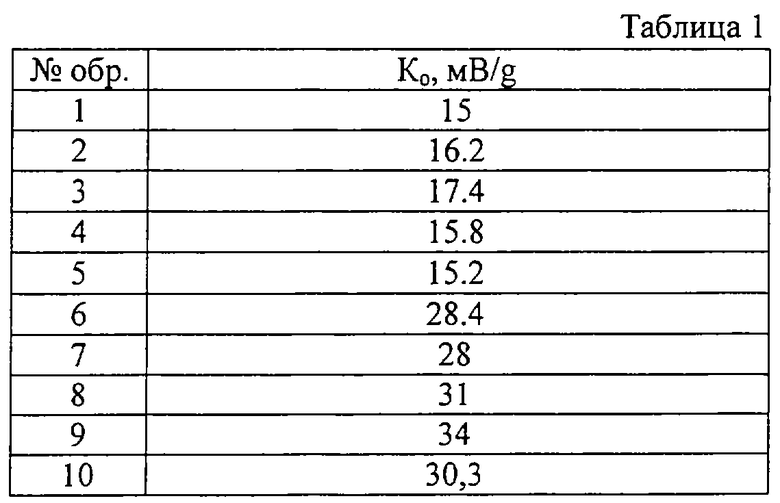
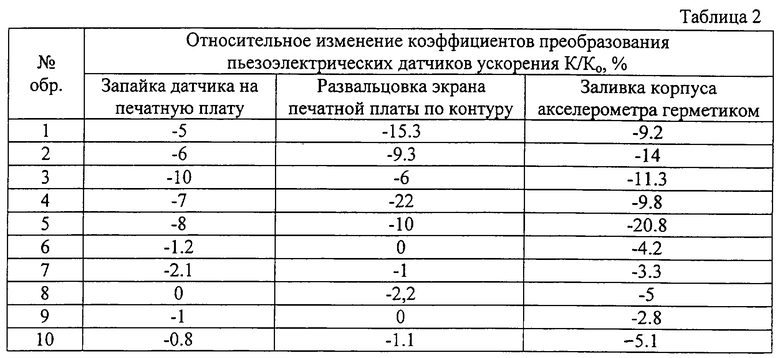
Для проведения сравнительных испытаний были изготовлены две группы датчиков ускорения в соответствии с фиг.2 и 3. Датчики с 1 по 5 номер были изготовлены аналогично прототипу, а датчики с 6 по 10 номер были изготовлены в соответствии с заявляемым изобретением. До закрепления обеих групп датчиков на печатные платы были определены их коэффициенты преобразования - приведены в таблице 1. Затем, датчики подвергались механическим воздействиям вследствие технологических операций: запайки на печатную плату, развальцовки экрана, заливки корпуса герметиком. После каждой операции измерялось относительное изменение коэффициента преобразования, вызванное такими воздействиями (см. таблицу 2 протокола). Вычислялось среднее значение этого изменения по каждой из групп.
Было установлено, что это изменение составило около 1% для датчиков второй группы и около 7% для датчиков первой после первой операции, менее 1% и более 12%, соответственно, после второй операции и 4% и 13%, соответственно после третьей операции. Из приведенных результатов испытаний однозначно следует вывод о том, что датчики второй группы, выполненные в соответствии с заявленным изобретением, существенно менее чувствительны к механическим воздействиям, возникающим в процессе их изготовления, чем датчики первой группы.
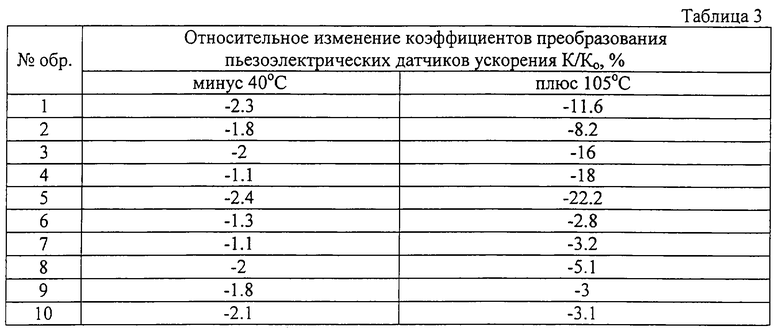
Далее упомянутые группы датчиков были подвергнуты температурному воздействию в диапазоне температур от -40oС до +105oС. Результаты этих испытаний приведены в таблице 3 и также показывают существенное снижение зависимости коэффициента преобразования у датчиков второй группы от температурных воздействий.
Таким образом, и результаты эксперимента, приведенные в прилагаемом протоколе, показали существенное снижение чувствительности коэффициента преобразования датчика ускорения, к паразитным механическим напряжениям, возникающим вследствие воздействия конструктивных, технологических и температурных факторов при выполнении основания датчика в соответствии с заявленным изобретением.
Протокол сравнительных испытаний пьезоэлектрических датчиков ускорения
1. Объект испытаний.
Первую группу образцов составили пьезоэлектрические датчики ускорения с условными номерами 1-5, содержащие чувствительный элемент (пьезоэлектрический биморф с выводом), выполненный в виде консоли, жестко закрепленной на основании в виде латунной пластины. Вторую группу образцов - пьезоэлектрические датчики ускорения с условными номерами 6-10, отличающиеся тем, что латунное основание выполнено в виде S-образной пластины, в центре которой находится возвышение в виде прямоугольной призмы, высота которого в 2,5 раза превышает толщину S-образной пластины. Чувствительный элемент закреплен на верхней грани возвышения.
2. Цель испытаний
Оценка влияния технологических факторов на основные параметры пьезоэлектрических датчиков ускорения в процессе производства акселерометров на их основе в зависимости от конструкции основания пьезоэлектрических датчиков.
Оценка чувствительности параметров пьезоэлектрических датчиков ускорения к изменению температур в диапазоне от минус 40oC до плюс 105oC в зависимости от конструкции их основания.
3. Основание для проведения испытаний
Протокол о намерениях между ОАО "ЭЛПА" и ОАО "КЗА" от 28.06.01.
4. Программа и методы испытаний
Испытания проводились по программе-методике, разработанной ОАО "КЗА". Контролируемым параметром пьезоэлектрических датчиков ускорения являлся коэффициент преобразования (К, мВ/g) датчиков.
5. Результаты испытаний
5.1 Пьезоэлектрические датчики ускорения до запайки их на печатные платы акселерометров имели коэффициенты преобразования, представленные в таблице 1.
5.2 Относительные изменения коэффициентов преобразования пьезоэлектрических датчиков ускорения (К/Ко), обусловленные воздействием технологических факторов в процессе производства акселерометров на их основе, представлены в таблице 2.
5.3 Относительные изменения коэффициентов преобразования пьезоэлектрических датчиков ускорения К/Ко под воздействием температуры в диапазоне от минус 40oC до плюс 105oC представлены в таблице 3.
6. Выводы
6.1 Образцы второй группы ( 6-10) обладают более чем в 1,5 раза большим коэффициентом преобразования при одинаковых геометрических размерах чувствительного элемента.
6.2 Образцы второй группы имеют существенно меньшие относительные изменения коэффициентов преобразования, обусловленные воздействием технологических факторов в процессе производства акселерометров на их основе.
6.3 Образцы второй группы имеют меньшие относительные изменения коэффициентов преобразования в диапазоне температур от минус 40oC до плюс 105oC.
Использование в качестве основания пьезоэлектрических датчиков S-образной латунной пластины, в центре которой находится возвышение в виде прямоугольной призмы, высота которого в 2,5 раза превышает толщину S-образной пластины, позволяет существенно снизить чувствительность коэффициента преобразования датчиков к воздействию механических напряжений, неизбежно возникающих вследствие воздействия конструктивных, технологических и температурных факторов. Последнее особенно важно в условиях серийного производства измерительных устройств на их основе, в частности, пьезоэлектрических акселерометров.
Источники информации
1. Б. Яффе, У. Кук, Г. Яффе. Пьезоэлектрическая керамика, М., Мир, 1974, с. 250-257.
2. Патент РФ 2018134, МПК 5 G 01 Р 15/09, 1994 г.
3. Патент США 4393688, н. кл.73-35, МПК G 01 L 23/22, 1983 г.
4. Патент РФ 2106643, МПК 6 G 01 Р 15/09, 1998 г.
5. Авторское свидетельство СССР 1205028, МПК 4 G 01 Р 15/09, 1983 г.
6. ОСТ 11 0444-87. Материалы пьезокерамические. ТУ.
7. В.В. Фурдуев. Электроника. ОГИЗ, М., 1948, Л., с.369-378.
8. BOSH Acceleration seusors, с. 20-21.
9. Патент США 4700973.
10. Патент США 5438859.
11. С.П. Стрелков. Механика. М., Наука, 1975, с.296.
12. Там же, с.318.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОГАБАРИТНЫЙ ДАТЧИК УДАРА | 2016 |
|
RU2621467C1 |
| ТРЕХКОМПОНЕНТНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКСЕЛЕРОМЕТР | 1995 |
|
RU2098830C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИБОР И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2011 |
|
RU2472253C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ИЗГИБНЫЙ ПРЕОБРАЗОВАТЕЛЬ С РЕГУЛИРУЕМОЙ РЕЗОНАНСНОЙ ЧАСТОТОЙ | 2006 |
|
RU2309435C1 |
| БИМОРФНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ СЕЙСМОПРИЕМНИК И СПОСОБ ПОЛУЧЕНИЯ ИДЕНТИЧНЫХ БИМОРФНЫХ ПЬЕЗОЭЛЕКТРИЧЕСКИХ СЕЙСМОПРИЕМНИКОВ | 1995 |
|
RU2119678C1 |
| Пьезоэлектрический преобразователь изгибных деформаций в электрический сигнал | 1980 |
|
SU957323A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ ДВУСТАБИЛЬНОЕ РЕЛЕ | 2010 |
|
RU2439736C2 |
| Вертикальный сейсмоприемник | 1980 |
|
SU911406A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ИЗДЕЛИЙ ПЬЕЗОТЕХНИКИ | 2011 |
|
RU2492491C2 |
| ДЕФОРМИРУЕМОЕ ЗЕРКАЛО НА ОСНОВЕ МНОГОСЛОЙНОЙ АКТИВНОЙ БИМОРФНОЙ СТРУКТУРЫ | 1996 |
|
RU2099754C1 |
Изобретение относится к измерительной технике, а конкретно к конструкциям электрических, механических и электромеханических датчиков и методике их закрепления на исследуемых (крепежных) объектах, преимущественно датчиков ускорения, выполненных на основе пьезокерамических биморфов консольного типа, и может быть использовано для измерения параметров детонаций в электронной системе управления двигателем автомобиля, а также вибраций в различных областях техники. Пьезоэлектрический датчик ускорения содержит биморфный чувствительный элемент, жестко закрепленный на твердом основании с токовыводами. Основная конструктивная особенность датчика заключается в том, что твердое основание выполнено из жестко соединенных друг с другом двух частей: основной, на которой закреплен биморфный, чувствительный элемент с токовыводами, и периферийной, при этом площадь сечения периферийной части выполнена меньше площади сечения основной части в месте их соединения не менее чем в два раза, а конечные участки периферийной части являются местами крепления датчика. Периферийная часть основания может быть выполнена в виде стержня, который может иметь S-образную форму. Основная часть основания может быть выполнена в виде цилиндра. Периферийная и основная части основания могут быть выполнены монолитными, как одно целое. Основание может быть выполнено из латуни. Техническим результатом является снижение влияния механических деформаций на коэффициент преобразования датчика. 6 з.п. ф-лы, 3 ил., 3 табл.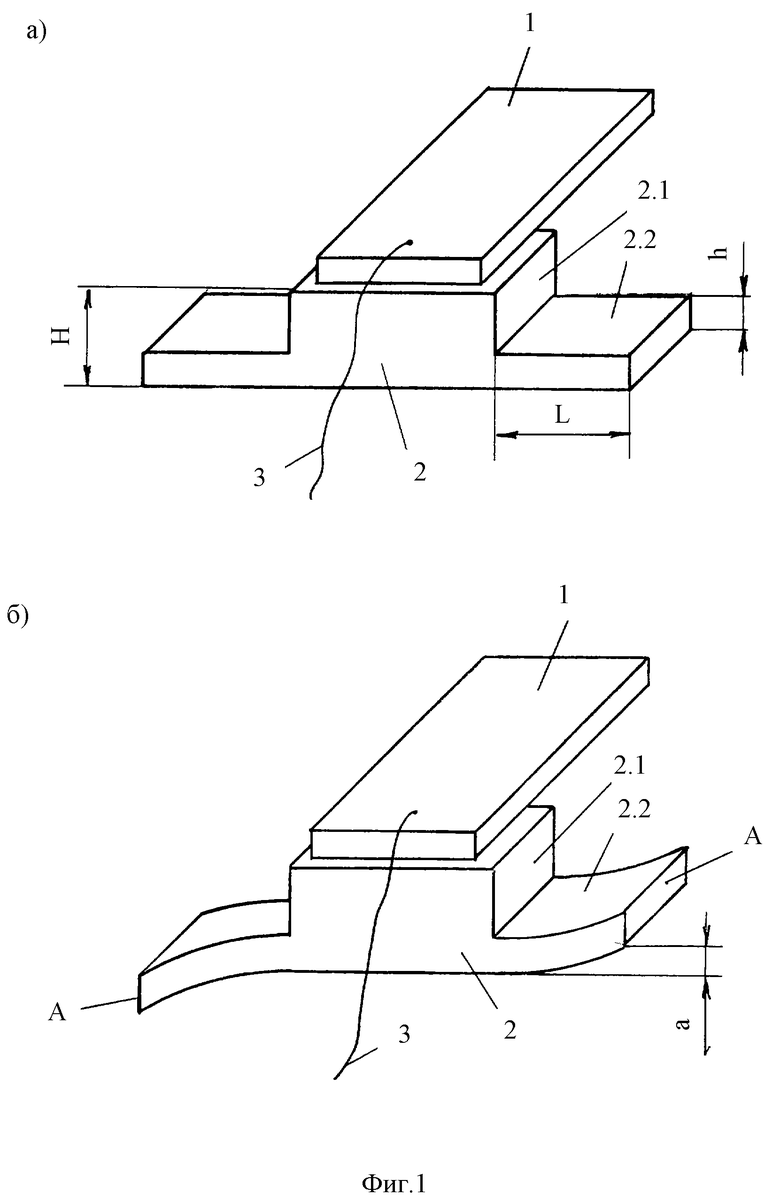
| US 5438859 A, 08.08.1995 | |||
| US 6360603 B1, 26.03.2002 | |||
| Огнеупорная краска для стальной арматуры | 1979 |
|
SU768532A1 |
| Многоступенчатое магнитно-жидкостное уплотнение | 1980 |
|
SU932044A1 |
| Пьезоэлектрический акселерометр | 1975 |
|
SU547696A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ВИБРОИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1992 |
|
RU2018134C1 |

