Изобретение относится к космической, авиационной и оборонной технике, а именно к устройствам сопряжения двух изделий, имеющих грубую пространственную ориентацию относительно друг друга.
Известно устройство сопряжения (БЛ4.499.000СБ, 1999 г. , разработка предприятия ОАО "Красногорский завод им. С.А. Зверева"), содержащее корпус, стыковочный элемент в виде резинового сильфона и рычажную систему осевой подачи сильфона. В указанном устройстве ограничено пространственное перемещение стыковочного элемента и, как следствие этого, необходима сравнительно высокая точность ориентации двух изделий между собой.
Наиболее близким из известных решений является устройство для подстыковки сильфонообразного тоннеля-лаза шлюзовой камеры к корпусу космического аппарата (а.с. СССР 1793654, опубликованное в 1999 г., В 64 G 1/64), содержащее основание, закрепленное на шлюзовой камере, три винтовых механизма, закрепленных в основании, расположенных равномерно относительно кольца и снабженных приводом, три стержня, установленных в направляющих отверстиях, выполненных в основании, при этом каждый из стержней соединен с кольцом посредством сферического шарнира, подвижную часть, включающую в себя стыковочный узел, содержащий сильфон с плоским стыковочным элементом, и приемный элемент в виде плоского фланца на корпусе космического аппарата.
Недостатком указанного устройства является ограниченность пространственного перемещения подвижной части, достаточная лишь для обеспечения параллельности рабочих плоскостей стыковочного и приемного элементов.
Задачей предлагаемого изобретения является создание устройства сопряжения двух изделий с повышенными эксплуатационными характеристиками.
Технический результат - увеличение амплитуды пространственного перемещения подвижной части устройства. Он достигается тем, что в устройстве сопряжения двух изделий, содержащем:
- основание для закрепления на одном из изделий с размещенными на основании тремя винтовыми механизмами, оснащенными приводом и расположенными на одинаковом расстоянии друг от друга,
- подвижную часть, на одном конце которой со стороны второго изделия размещен стыковочный узел, состоящий из сильфона и стыковочного элемента, и
- приемный элемент, закрепленный на втором изделии,
в отличие от известного, на противоположном от стыковочного узла конце подвижной части, размещен сферический подшипник, в кольце которого, не связанном с подвижной частью, закреплены гайки винтовых механизмов, на гайках, с возможностью качания, установлены подпружиненные разноплечие рычаги, длинные плечи которых служат опорой подвижной части, а винты винтовых механизмов установлены в подшипниках в неподвижных кронштейнах, расположенных в основании, причем ближние к стыковочному узлу торцы кронштейнов имеют общую коническую поверхность, служащую опорой ответного конуса подвижной части в ее исходном положении, при этом сопрягаемые поверхности стыковочного и приемного элементов выполнены коническими.
Кроме того, в нем стыковочный и приемный элементы снабжены заходным цилиндром, при этом коническая поверхность стыковочного элемента снабжена герметизирующей прокладкой, а стыковочный узел соединен с подвижной частью с помощью пружины и радиально расположенных направляющих.
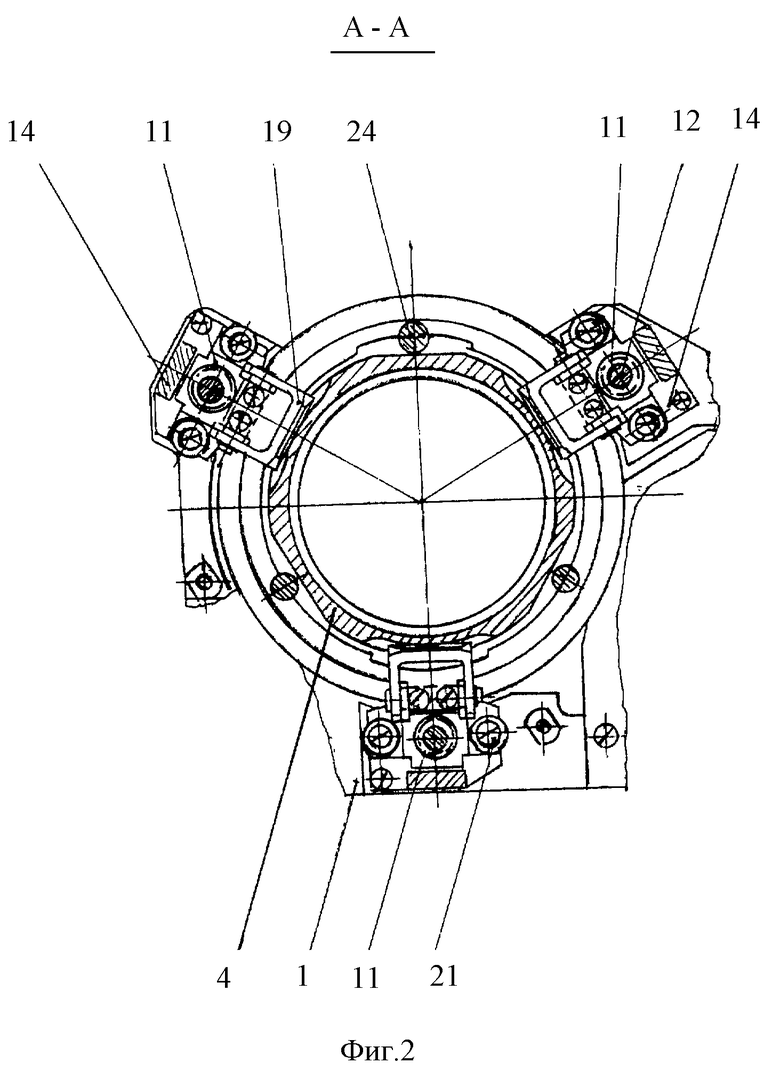
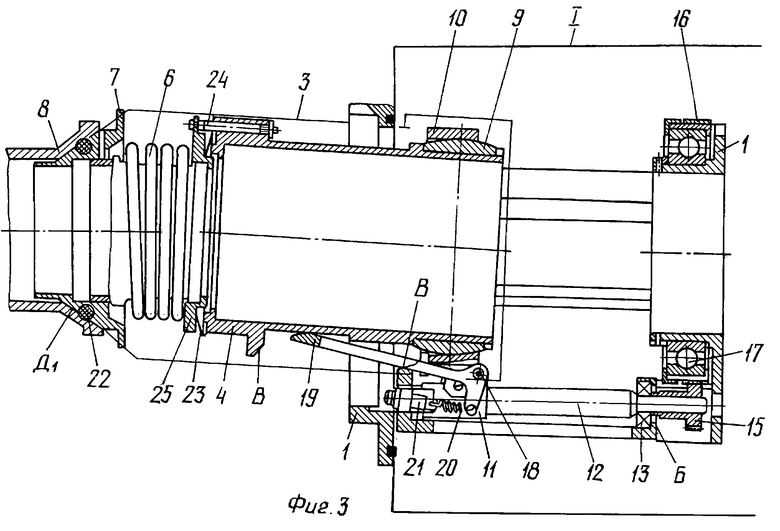
На. фиг.1 изображен общий вид устройства сопряжения изделий I и II, разрез; на фиг.2 - поперечный разрез А-А устройства, приведенного на фиг.1; на фиг.3 - устройство в положении стыковки с приемным элементом, размещенным на изделии II.
На первом изделии (фиг.1) закреплено основание 1, состоящее из двух частей, соединенных между собой с помощью стяжек в одно целое (на фиг.1 не показано). Первая часть основания 1 имеет опорную плоскость А для установки на изделие I, а на второй части основания 1 размещены три винтовых механизма, оснащенных приводом. Винтовые механизмы 2 установлены на одинаковом угловом расстоянии друг от друга вокруг геометрической оси подвижной части 3. Подвижная часть 3 состоит из корпуса 4, имеющего форму тела вращения, на одном конце которого со стороны изделия II размещен стыковочный узел 5, состоящий из сильфона 6 и стыковочного элемента 7. На изделии II закреплен приемный элемент 8. На другом конце подвижной части 3 установлен сферический подшипник 9. На его кольце 10 закреплены гайки 11 винтовых механизмов 2, а их винты 12 размещены в подшипниках 13 в кронштейнах 14. Винты 12 с помощью шестерен 15 соединены с солнечным колесом 16, закрепленным на наружном кольце подшипника 17, который установлен на второй части основания 1 концентрично геометрической оси подвижной части 3 в ее исходном положении (фиг.1).
На гайках 11 винтовых механизмов 2 с возможностью качания вокруг оси 18 установлены три разноплечих рычага 19, длинные плечи которых служат опорой корпуса 4 подвижной части 3, а короткие находятся под действием пружин 20, регулируемых винтами 21. Резьба под винты 21 нарезана также в гайках 11 винтовых механизмов 2.
Кронштейны 14 закреплены на плоскости Б второй части основания 1. Противоположные, ближние к стыковочному узлу 5, торцы кронштейнов 14 имеют общую коническую поверхность В, на которую в исходном положении подвижной части 3 опирается сопряженная коническая поверхность подвижной части.
Стыковочный элемент 7 содержит цилиндрическую Г и коническую Д1 поверхности, при этом приемный элемент 8 имеет соответственно коническую Д2 поверхность сопряжения.
Исполнение стыковочного элемента 7 с цилиндрической поверхностью Г целесообразно при большом смещении осей стыковочного 7 и приемного 8 элементов и соответственно изделий I и II, кроме того, чем больше конусность поверхностей Д1 и Д2, тем допустимо большее смещение геометрических осей стыковочного 7 и приемного 8 элементов.
На конусной поверхности Д1 стыковочного элемента 7 предусмотрена герметизирующая прокладка 22. Для динамической разгрузки и обеспечения необходимого усилия при герметизации стыка предусмотрена плоская пружина 23, а соединение стыковочного узла 5 с подвижной частью 3 устройства обеспечено тремя направляющими 24, установленными с возможностью осевой подвижки вместе с фланцем 25 на одинаковых (120o) угловых расстояниях между собой в подвижной части 3.
Принцип работы устройства приводится для случая, когда геометрические оси приемного элемента 8 и подвижной части 3 (в ее исходном положении) максимально смещены относительно друг друга.
На фиг. 1 подвижная часть 3 устройства находится в исходном положении. При вращении приводом (не показан) солнечного колеса 16 и с помощью шестерен 15 винтов 12 винтовых механизмов 2 подвижная часть 3 устройства гайками 11, закрепленными на кольце 10 сферического подшипника 9, перемещается вдоль геометрической оси от исходного положения. При перемещении подвижная часть 3 сохраняет горизонтальное (заданное в исходном положении коническими поверхностями В) положение даже при большом выбеге. Это обеспечивается регулировкой пружин 20 рычагов 19, поддерживающих подвижную часть 3 и перемещающихся вместе с ней.
После касания заходного цилиндра Г стыковочного элемента 7 в какой-либо точке конусной части Д2 приемного элемента 8, при дальнейшем перемещении подвижной части 3 под действием привода последняя отклоняется на сферическом подшипнике 9 до тех пор, пока противоположная (первоначальной точке касания) точка цилиндра Г стыковочного элемента 7 не коснется противоположной образующей конуса Д2 приемного элемента 8. При дальнейшем движении подвижной части 3 за счет наклона стыковочного элемента 7 на сильфоне 6 конусная направляющая Д1 стыковочного элемента 7 устанавливается по сопряженной конусной поверхности Д2 приемного элемента 8 (фиг.3).
Требуемое усилие сжатия конусов стыковочного 7 и приемного 8 элементов и герметизация стыка прокладкой 22 обеспечиваются за счет сжатия пружины 23.
При изменении направления вращения привода стыковочный 7 и приемный 8 элементы размыкаются, подвижная часть 3 устройства возвращается в исходное положение и за счет разворота на сферическом подшипнике 9 принимает горизонтальное положение на конических поверхностях В кронштейнов 14 и подвижной части 3.
При совпадении геометрических осей приемного элемента 8 и стыковочного элемента 7 работа аналогична предыдущему случаю, только сопряжение происходит без участия заходного цилиндра сразу коническими поверхностями Д1 и Д2.
Устройство сопряжения, реализованное по данному изобретению, обеспечило достижение технического результата, т. е. обеспечило возможность стыковки двух изделий при смещении геометрических осей приемного элемента одного изделия и подвижной части другого на 12 мм в любую сторону и осевом перемещении подвижной части на 60 мм от исходного положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАЗБОРНАЯ ОПРАВКА | 2012 |
|
RU2504471C1 |
| УСТРОЙСТВО ДЛЯ КОЛЛИНЕАРНОГО ПЕРЕНОСА ОПТИЧЕСКИХ ОСЕЙ | 1993 |
|
RU2063059C1 |
| УСТРОЙСТВО ДЛЯ ЗАДАНИЯ ПЛОСКОСТИ ГОРИЗОНТА | 1995 |
|
RU2097698C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 1997 |
|
RU2140622C1 |
| ГЛАДКАЯ РЕГУЛИРУЕМАЯ СКОБА | 1996 |
|
RU2110765C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАЗМЕРОВ ИЗДЕЛИЙ | 2002 |
|
RU2269090C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ В ВОДЕ | 1996 |
|
RU2102096C1 |
| БИНОКЛЬ | 1995 |
|
RU2094835C1 |
| БИНОКУЛЯРНАЯ СТЕРЕОСКОПИЧЕСКАЯ ЛУПА | 1995 |
|
RU2107934C1 |
| УСТРОЙСТВО НАБЛЮДЕНИЯ | 2001 |
|
RU2186416C1 |
Изобретение относится к космической, авиационной и оборонной технике, а именно к устройствам сопряжения двух изделий, имеющих грубую пространственную ориентацию относительно друг друга Устройство сопряжения двух изделий содержит закрепленное на одном из изделий основание с размешенными на нем тремя винтовыми механизмами, оснащенными приводом и расположенными на одинаковых расстояниях друг от друга, и подвижную часть, включающую в себя стыковочный узел с сильфоном и стыковочным элементом и расположенный на противоположном конце от стыковочного узла сферический подшипник. В кольце сферического подшипника, не связанном с подвижной частью, закреплены гайки винтовых механизмов, на которых с возможностью качания установлены подпружиненные разноплечие рычаги, длинные плечи которых служат опорой подвижной части. Винты винтовых механизмов установлены в подшипниках в неподвижных кронштейнах. Ближние к стыковочному узлу торцы кронштейнов имеют общую коническую поверхность, служащую опорой ответного конуса подвижной части в исходном положении. Сопрягаемые поверхности стыковочного и закрепленного на другом изделии приемного элементов выполнены коническими. Технический результат - увеличение амплитуды пространственного перемещения подвижной части. 1 з.п. ф-лы, 3 ил.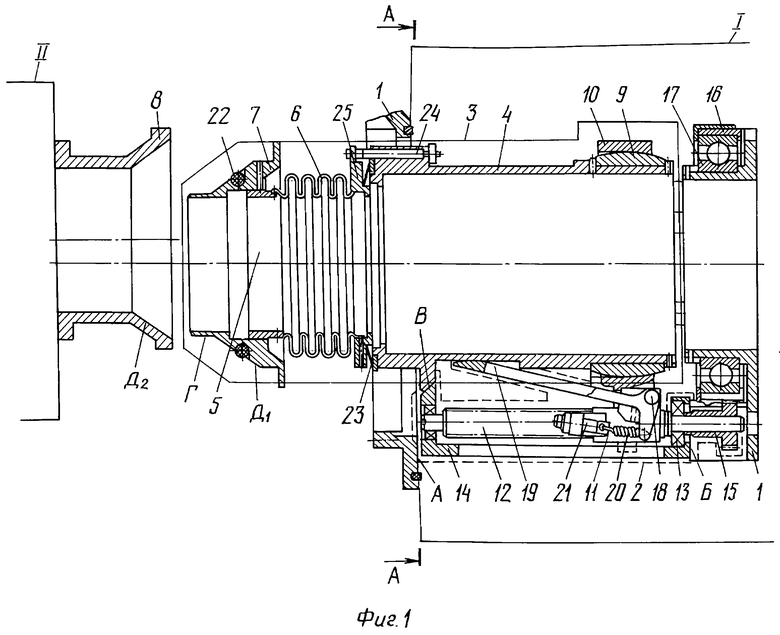
| SU 1793654, 10.01.1999 | |||
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |
| US 4905938 A1, 06.03.1990 | |||
| СПОСОБ ПОЛУЧЕНИЯ ПРОПИЛЕНОКСИДА | 2010 |
|
RU2528385C2 |

