Изобретение относится к области измерительной техники и может быть использовано в системах измерения скорости движения грузонесущей ленты транспортного конвейера.
Известно устройство для измерения скорости движения рулонного материала [1] , основанное на измерении времени перемещения ленты на известное расстояние по регистрации моментов прохождения двух последовательных контрольных точек участком ленты с одним и тем же значением диэлектрической проницаемости.
Недостатком устройства является необходимость обеспечения постоянства толщины ленты.
Более широкими возможностями обладает корреляционный измеритель скорости, основанный на вычислении корреляционной функции двух функций времени измеряемого параметра, измеренных в двух последовательных контрольных точках и рассматриваемых как две случайные функции [2]. Указанное устройство содержит два сенсора-преобразователя магнитного поля Земли в напряжение, два аналого-цифровых преобразователя, два регистра памяти, регистр сдвига, перемножитель, устройство усреднения, детектор огибающей, пороговый детектор и микропроцессор. Указанные элементы формируют данные для вычисления корреляционной функции двух сигналов сдвинутых относительно друг друга на время, определяемое величиной базового расстояния между двумя сенсорами и скоростью движения объекта. Микропроцессор производит вычисление указанной функции и определяет время задержки, при котором корреляционная функция имеет максимальное значение. По величине этой задержки производится расчет скорости движения.
Недостатком устройства при применении его в горно-технологических процессах является значительное увеличение погрешности измерений при транспортировании однородного или мелкодисперсного груза.
Задача настоящего изобретения - снижение погрешности измерений в указанных условиях.
Поставленная задача решается путем введения в известную схему корреляционного измерителя скорости двух регулируемых усилителей, фильтра верхних частот, детектора и устройства усреднения.
На чертеже представлена структурная схема устройства для измерения скорости движения конвейерной ленты.
Устройство содержит два сенсорных элемента - преобразователя "физический параметр среды - электрический сигнал" 1 и 2, два регулируемых усилителя каждого канала 3 и 4, два аналого-цифровых преобразователя 5 и 6, микроконтроллер 7, устройство индикации 8, фильтр верхних частот 9, детектор 10 и устройство усреднения 11. Выходы сенсорных элементов 1 и 2 через управляемые усилители 3 и 4 и аналого-цифровые преобразователи 5 и 6 соответственно соединены с первым и вторым входами микроконтроллера 7, выход микроконтроллера 7 соединен с входом устройства индикации 8. Выход первого управляемого усилителя 3 соединен через фильтр верхних частот 9, детектор 10 и устройство усреднения 11 с управляющими входами усилителей 3 и 4.
В качестве сенсорного элемента 1 в предлагаемом устройстве может быть использован емкостный датчик, выходной сигнал которого пропорционален эффективной площади поперечного сечения транспортируемого конвейером груза, проходящего в данный момент между электродами датчика. Второй сенсорный элемент аналогичен первому и расположен на некотором базовом расстоянии от первого по ходу движения ленты.
Устройство работает следующим образом.
Элементы 1, 3, и 5 с одной стороны и 2, 4 и 6 с другой формируют цифровые сигналы, идентифицирующие мгновенные значения эффективных площадей поперечного сечения транспортируемого груза, проходящих в данный момент в зоне измерения первого и второго сенсорных элементов 1 и 2. Микроконтроллер 7 осуществляет вычисление корреляционной функции этих двух сигналов и подбирает время задержки, при котором значение этой функции максимально. Далее микроконтроллер вычисляет значение скорости движения ленты путем деления величины базового расстояния на полученное время задержки. Микроконтроллер может выполнять функции, описанные в [2]. Результат вычислений отображается индикаторным устройством 8 и может использоваться в системах управления скоростью конвейерной ленты, обеспечивая стабильность ее загрузки, что в свою очередь приводит к увеличению срока службы дорогостоящей конвейерной ленты.
Известно, что точность подобного метода измерения скорости тем выше, чем сильнее разнятся значения функции в начальный и задержанный моменты времени. Эти условия не выполняются при транспортировании груза ленточным конвейером в условиях горного производства. В разные моменты времени может транспортироваться крупнокусковой груз, удовлетворяющий условию обеспечения высокой точности, или мелкодисперсный груз, площади поперечного сечения которого мало отличаются в разные моменты времени.
С целью снижения данной погрешности в схему вводится фильтр верхних частот 9, соединенный с выходом регулируемого усилителя 3, детектор 10 и устройство усреднения 11. Выходной сигнал системы "фильтр верхних частот - амплитудный детектор" в определенной мере идентифицирует значение дисперсии сигнала, т. е. изменчивость контролируемой функции во времени. После усреднения по времени этот сигнал поступает на управляющие входы регулируемых усилителей, изменяя их коэффициенты усиления таким образом, чтобы в среднем переменная составляющая сигнала имела значение, близкое к стандартному. Таким образом, погрешность измерения скорости движения грузонесущей конвейерной ленты может быть сделана достаточно низкой и постоянной, независимо от дисперсности груза и его текущего количества.
Литература
1. А. Б. Релин, Е.В. Сова, В.А. Фролов. Авторское свидетельство CCCP SU 1721514 A1, G 01 Р 3/66.
2. David Krasnjanski Патент США 4509131, G 01 Р/342.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЯЦИОННЫЙ ДАТЧИК ИНФРАКРАСНОГО ИЗЛУЧЕНИЯ | 2003 |
|
RU2279713C2 |
| СПОСОБ МУЛЬТИФУНКЦИОНАЛЬНОЙ ДИАГНОСТИКИ ПОДШИПНИКОВЫХ УЗЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ В ИНТЕГРАЛЬНОМ ИСПОЛНЕНИИ | 2019 |
|
RU2728485C1 |
| АДАПТИВНОЕ УСТРОЙСТВО ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ | 1994 |
|
RU2097781C1 |
| СПОСОБ ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2416807C2 |
| УЛЬТРАЗВУКОВОЙ ПРИБОР ДЛЯ ДИАГНОСТИКИ ПОРАЖЕНИЙ СЛУХА | 2006 |
|
RU2307587C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО БЕСКОНТАКТНОГО МОНИТОРИНГА ПАРАМЕТРОВ ЖИЗНЕДЕЯТЕЛЬНОСТИ ЧЕЛОВЕКА | 2010 |
|
RU2462990C2 |
| УСТРОЙСТВО АНАЛИЗА БРОНХОФОНОГРАММ | 2013 |
|
RU2574713C2 |
| АППАРАТ ДЛЯ ДИАГНОСТИКИ И ЛЕЧЕНИЯ НЕЙРОСЕНСОРНОЙ ТУГОУХОСТИ | 2013 |
|
RU2535405C1 |
| ТРАССОПОИСКОВЫЙ ПРИЕМНИК | 2011 |
|
RU2482517C1 |
Изобретение относится к измерительной технике и может быть использовано в системах измерения скорости движения грузонесущей ленты транспортного конвейера. Сущность изобретения: в известную схему корреляционного измерителя скорости вводится устройство контроля величины дисперсии измеряемого параметра грузопотока с последующим нормированием этой величины с помощью усилителя с управляемым коэффициентом усиления. Техническим результатом является повышение точности измерения скорости в условиях изменяющихся параметров грузопотока горно-технологических процессов. 1 ил.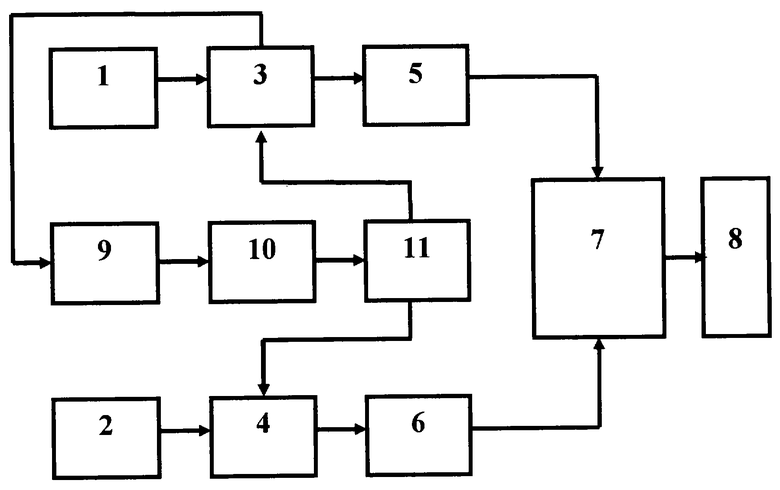
Устройство для измерения скорости движения конвейерной ленты, содержащее два сенсорных устройства, два аналого-цифровых преобразователя и микроконтроллер, выход которого соединен с входом устройства индикации, отличающееся тем, что в него введены два регулируемых усилителя, фильтр верхних частот, детектор и устройство усреднения, причем выходы сенсорных устройств через регулируемые усилители и аналого-цифровые преобразователи соединены соответственно с первым и вторым входами микроконтроллера, а выход первого регулируемого усилителя соединен через фильтр верхних частот и амплитудный детектор с входом устройства усреднения, выход которого соединен с управляющими входами регулируемых усилителей.
| US 4509131 A, 02.04.1985 | |||
| Устройство для измерения скорости движения рулонного материала | 1989 |
|
SU1721514A1 |
| Устройство для измерения скорости движения объекта | 1989 |
|
SU1661645A1 |
| Способ пропитки кожи | 1944 |
|
SU65906A1 |
| US 5473257 A, 05.12.1995. | |||

