Предлагаемое изобретение относится к области радиоэлектроники, в частности ближней радиолокации, и может быть использовано в составе систем комплексного обеспечения безопасности, в том числе физической охраны объектов и площадей, безопасности транспортных средств и контроля перемещения механизмов.
Известен способ для радиолокационного измерения скоростей и координат объектов (см. Ширман Я.Д. Теоретические основы радиолокации. М., изд-во "Советское радио", 1970, стр.374-375), в соответствии с которым производят облучение объекта периодическим линейно-модулированным по частоте зондирующим сигналом, принимают отраженный от объекта сигнал, выделяют сигнал с разностной частотой и оценивают его спектр, по результатам оценки спектра определяют скорость и координаты объекта.
Недостатками известного способа является неоднозначность разделения объектов в процессе измерения, а также неоднозначность определения скорости и дальности до объектов.
Также известен способ (см. S.Mlyahara, "New Algorithm for Multiple Object Detection in FM-CW Radar", SAE 2004 World Congress, 2004-01-0177, 2004), в соответствии с которым объект облучают периодическим линейно-модулированным по частоте зондирующим сигналом, причем крутизна характеристики линейного закона модуляции изменяется каждый период модуляции зондирующего сигнала, принимают отраженный от объекта сигнал, выделяют сигнал с разностной частотой, оценивают спектр выделенного сигнала и по результатам оценки спектра для различных периодов модуляции разностей частоты определяют скорость и координаты объектов.
Недостатком известного способа является неоднозначность определения скорости и дальности до объектов.
Наиболее близким к заявляемым, выбранным в качестве прототипа, являются способ и система, защищенные патентом РФ №2255352, класс МПК G01S 13/42, опубликованным 2005.06.27. Способ включает излучение периодически модулированного по частоте зондирующего сигнала, прием отраженных от объектов сигналов, перемножение излучаемого и принятых сигналов, усиление в заданной полосе частот и анализ полученного в результате перемножения гомодинного сигнала. Объекты обнаруживают путем выявления элементов матрицы функций взаимной корреляции базисных сигналов и отраженного от объектов сигнала, значения которых превышают заданный пороговый уровень. Система содержит антенно-фидерное устройство, излучающее зондирующий и принимающее отраженные от объектов сигналы, приемопередающее устройство, обеспечивающее формирование зондирующего сигнала, перемножение с ним принятых сигналов и усиление полученного гомодинного сигнала, причем выход приемопередающего устройства соединен со входом антенно-фидерного устройства, а также соединенные шиной данных аналого-цифровой преобразователь и процессор, вход управления частотой зондирующего сигнала и выход гомодинного сигнала приемопередающего устройства соединены соответственно с выходом процессора и входом аналого-цифрового преобразователя, и коррелометр, соединенный шиной данных с аналого-цифровым преобразователем и процессором.
Недостатками известного способа и системы являются зависимость обнаруженной дальности объектов от временных задержек в тракте приемопередающих устройств и устройств анализа гомодинного сигнала, что приводит к снижению точности измерения дальности, а также зависимость качества обработки от временной синхронизации аналого-цифровых частей системы, что приводит к снижению стабильности измеряемых характеристик.
Для устранения вышеуказанных недостатков была поставлена задача создания способа и системы для радиолокационного измерения скорости и координат объектов, обеспечивающих автоматическую адаптацию способа и системы для радиолокационного измерения к изменению временных задержек в тракте обработки сигналов.
Технический результат реализации изобретения заключается в повышении точности измерения дальности за счет устранения систематической ошибки измерения дальности и увеличении стабильности измеряемых характеристик за счет синхронизации аналоговой и цифровой части системы.
Указанный технический результат достигается тем, что в способе радиолокационного измерения скоростей и координат объектов, включающем излучение периодически модулированного по частоте зондирующего сигнала, прием отраженных от объектов сигналов, перемножение излучаемого и принятых сигналов, усиление полученного в результате перемножения гомодинного сигнала, формирование линейным и аналого-цифровым преобразованиями из гомодинного сигнала сигнала промежуточных частот в виде последовательности цифровых фрагментов заданной длительности, формирование основной двумерной матрицы базисных сигналов и квадратурной по отношению к основной, номера столбцов которых соответствуют множеству средних ожидаемых значений дальности, а номера строк - множеству средних ожидаемых значений скорости отражающих объектов, вычисление последовательности основных и квадратурных матриц значений функций взаимной корреляции матриц базисных сигналов и каждого из фрагментов сигнала промежуточных частот, обнаружение объектов путем выявления элементов матриц функций взаимной корреляции любого фрагмента, значения которых превышают заданный пороговый уровень, и определение дальности и скорости обнаруженных объектов по номерам, соответственно, столбца и строки выявленных элементов, согласно изобретению излучаемый периодически модулированный по частоте зондирующий сигнал ослабляют и добавляют к принятым отраженным от объектов сигналам, линейным преобразованием цифровых отсчетов полученного сигнала промежуточных частот формируют эталонный сигнал, вычисляют функцию взаимной корреляции базисных сигналов и эталонного сигнала, по которой определяют объект с минимальной дальностью, вычисляют временной сдвиг максимума функции взаимной корреляции базисного сигнала, соответствующего объекту с минимальной дальностью, и эталонного сигнала, корректируют на основе определенных значений дальности обнаруженных объектов и основную и квадратурную матрицы базисных сигналов.
Указанный технический результат достигается также тем, что в способе радиолокационного измерения скоростей и координат объектов, включающем излучение периодически модулированного по частоте зондирующего сигнала, прием отраженных от объектов сигналов, по крайней мере, в двух позициях, пространственно отнесенных друг от друга, перемножение излучаемого и принятых сигналов, усиление полученных в результате перемножения гомодинных сигналов, в каждой позиции линейным и аналого-цифровым преобразованиями гомодинного сигнала формирование сигнала промежуточных частот в виде последовательности цифровых фрагментов заданной длительности, формирование трехмерной основной матрицы базисных сигналов и квадратурной по отношению к основной, номера столбцов первого измерения которых соответствуют множеству средних ожидаемых значений дальности, номера столбцов второго измерения - множеству средних ожидаемых значений угловой координаты, а номера строк - множеству средних ожидаемых значений скорости отражающих объектов, вычисление в каждой позиции последовательности основных и квадратурных матриц значений функций взаимной корреляции матриц базисных сигналов и каждого из фрагментов сигнала промежуточных частот, соответственно количеству фрагментов вычисление последовательности суммарных основных и квадратурных матриц путем суммирования соответствующих столбцу и строке значений функций взаимной корреляции, полученных во всех позициях, обнаружение объектов путем выявления элементов любой суммарной матрицы функций взаимной корреляции, значения которых превышают заданный пороговый уровень, и определение дальности, угловой координаты и скорости обнаруженных объектов по номерам, соответственно, столбцов и строки выявленных элементов, согласно изобретению излучаемый периодически модулированный по частоте зондирующий сигнал ослабляют и в каждой пространственной позиции приема добавляют к принятым отраженным от объектов сигналам, линейным преобразованием цифровых отсчетов полученного сигнала промежуточных частот формируют матрицу эталонных сигналов, вычисляют матрицу функций взаимной корреляции базисных сигналов и эталонных сигналов, по которой определяют объекты с минимальной дальностью, по одному объекту для каждой пространственной позиции приема, определяют временные сдвиги максимумов функций взаимной корреляции базисных сигналов, соответствующих определенным объектам с минимальной дальностью, и эталонных сигналов, по одному временному сдвигу для каждой пространственной позиции, корректируют на основе определенных значений дальности обнаруженных объектов и основную и квадратурную матрицы базисных сигналов.
Целесообразно согласно изобретению при формировании эталонных сигналов зондирующий сигнал задерживать после ослабления и до добавления к принятым отраженным от объектов сигналам.
Дополнительно согласно изобретению излучаемый периодически модулированный по частоте зондирующий сигнал ослабляют и добавляют к принятым отраженным от объектов сигналам в заданные моменты времени, формируют эталонные сигналы, по одному эталонному сигналу на приемную позицию, определяют объекты с минимальной дальностью по одному для каждой пространственной позиции приема, вычисляют сдвиги максимумов функций взаимной корреляции базисных и эталонных сигналов, выполняют корректировки синхронно добавлению ослабленного модулированного по частоте зондирующего сигнала к принятым отраженным от объектов сигналам.
Указанный технический результат достигается тем, что в систему для радиолокационного измерения скоростей и координат отражающих объектов, содержащую антенно-фидерное устройство, обеспечивающее излучение зондирующего и прием отраженных от измеряемых объектов сигналов, приемопередающее устройство, обеспечивающее формирование зондирующего сигнала, перемножение с ним принятых сигналов и усиление полученного гомодинного сигнала, причем выход приемопередающего устройства соединен со входом антенно-фидерного устройства, а также соединенные шиной данных аналого-цифровой преобразователь и процессор, вход управления частотой зондирующего сигнала и выход гомодинного сигнала приемопередающего устройства соединены соответственно с выходом процессора и входом аналого-цифрового преобразователя, и коррелометр, соединенный шиной данных с аналого-цифровым преобразователем и процессором, согласно изобретению, введены аттенюатор и сумматор, причем вход аттенюатора соединен с выходом передающего устройства, выход аттенюатора подключен к первому входу сумматора, второй вход сумматора соединен с выходом антенно-фидерного устройства, причем выход антенно-фидерного устройства не имеет прямого соединения со входом приемопередающего устройства, выход сумматора соединен со входом приемного устройства.
Также в системе согласно изобретению аналого-цифровой преобразователь может быть выполнен с несколькими входами, приемопередающее устройство содержит формирователь зондирующего сигнала, усилитель мощности, несколько, по крайней мере, два - выхода гомодинных сигналов, смесителей и полосовых усилителей, аттенюаторы и сумматоры, причем количество аттенюаторов и сумматоров равно количеству выходов гомодинных сигналов приемопередающего устройства, антенно-фидерное устройство содержит передающую антенну и несколько - по числу смесителей - приемных антенн, подключенных соответственно к микроволновому выходу и микроволновым входам антенно-фидерного устройства, причем выход формирователя зондирующего сигнала подключен через усилитель мощности к микроволновому выходу приемопередающего устройства, соединенному с микроволновым входом антенно-фидерного устройства и входами аттенюаторов, вход управления частотой зондирующего сигнала является входом управления частотой зондирующего сигнала приемопередающего устройства, первые входы смесителей подключены к микроволновым входам приемопередающего устройства, соединенным с выходами сумматоров, первые входы которых подключены через линии задержки к выходам аттенюаторов, а вторые к микроволновым выходам антенно-фидерного устройства, вторые входы смесителей подключены к выходу формирователя зондирующего сигнала, а выходы соединены через полосовые усилители с выходами гомодинных сигналов приемопередающего устройства, подключенными к входам аналого-цифрового преобразователя.
Сущность предложенного изобретения заключается в том, что применяемый корреляционно-фильтровой метод, используемый для обработки отраженных от определяемых объектов сигналов, адаптируется к временных задержкам сигналов в целях их обработки, причем для вычисления временных задержек также используется корреляционно-фильтровой метод.
Передающей антенной излучается зондирующий сигнал:

где Апрм - амплитуда зондирующего сигнала, ϕ(t) - закон изменения фазы зондирующего сигнала во времени.
Отраженный от зондируемого объекта сигнал, принятый приемной антенной, имеет вид:

где Апрм - амплитуда сигнала на выходе приемной антенны, τ - время распространения электромагнитной волны от передающей антенны до зондируемого объекта, равное времени распространения электромагнитной волны, отраженной от зондируемого объекта до приемной антенны, при этом полагается, что приемная и передающая антенны находятся в непосредственной близости друг от друга, Ωд - круговая частота Доплера отраженного от объекта сигнала, определяемая радиальной скоростью зондируемого объекта, ϕн - случайная начальная фаза отраженного от зондируемого объекта сигнала.
Передающая и приемная антенны могут быть объединены в одну приемопередающую антенну, а передаваемый и принимаемый антенной сигнал разделяется в устройстве для направленной передачи энергии электромагнитных колебаний, например, в ферритовом циркуляторе. При этом один из входов устройства для направленной передачи энергии электромагнитных колебаний подключен к выходу передающего устройства (или к высокочастотному выходу приемопередающего устройства), второй вход подключен к антенне, а выход подключен ко входу приемного устройства (или к высокочастотному входу приемопередающего устройства). Таким образом, объединение приемной и передающей антенн в приемопередающую антенну позволяет упростить реализацию системы, не изменяя сущность описываемого способа радиолокационного измерения скоростей и координат объектов.
Зондирующий и отраженный сигналы подаются на смеситель, на выходе которого после низкочастотной фильтрации и, возможно, дополнительной полосовой фильтрации формируется гомодинный сигнал:

где i - порядковый номер зондируемого объекта, K - коэффициент усиления, включающий в себя амплитуду зондирующего сигнала, амплитуду отраженного от объекта сигнала и коэффициент передачи смесителя и фильтра после него.
В случае отражения зондирующего сигнала от нескольких целей гомодинный сигнал будет являться линейной суммой гомодинных сигналов, полученных для каждой из целей при отсутствии остальных:

Для случая гармонической частотной модуляции можно показать, что:



где Ωм - круговая частота модуляции, Ωдев - круговая частота девиации, L - дальность до зондируемого объекта, Ψ - индекс частотной модуляции, Jx(y) - функция Бесселя, n - номера гармоник гомодинного сигнала, определяемые фильтрацией сигнала на выходе смесителя.
Для определения скоростей и дальностей зондируемых объектов гомодинный сигнал оцифровывается и сравнивается корреляционно-фильтровым методом с базисными сигналами:

где Тф - время накопления сигнала в коррелометре, кратное периоду модуляции зондирующего сигнала.
Каждый из базисных сигналов является ожидаемым гомодинным сигналом, рассчитанным для одиночной цели, при отсутствии иных целей, с заданными координатами и скоростью. Совокупность базисных сигналов по дальности и скорости формирует матрицу базисных сигналов, каждый элемент которой имеет следующий вид:

где L, υ - дальность и скорость определяемых объектов. Зондируемый диапазон дальностей и скоростей разбивается на поддиапазоны, для центра каждого поддиапазона рассчитывается базисный сигнал  .
.
При внимательном рассмотрении гомодинного сигнала можно заметить его зависимость от начальной фазы отраженного от зондируемого объекта радиочастотного сигнала. Целесообразно представить гомодинный сигнал в квадратурной форме, выделяя его основную и квадратурную составляющие, что позволит при дальнейшей обработке избавиться от зависимости гомодинного сигнала от начальной фазы отраженного зондирующего сигнала. В этом случае матрицу базисных сигналов можно разделить на основную и квадратурную матрицы базисных сигналов.


Коррелометром вычисляются матрицы, основная и квадратурная, функций взаимной корреляции базисных сигналов и принятого гомодинного сигнала:


Формируются последовательности функций взаимной корреляции, на основе которых решающее устройство обнаруживает объекты и оценивает их параметры. Множество строк функций взаимной корреляции представляет множество ожидаемых дальностей объектов, по одной дальности на каждую строку матрицы, а множество столбцов - множество ожидаемых скоростей, по одной скорости на каждый столбец матрицы. Объект считается обнаруженным, если последовательность функций взаимной корреляции превышает заранее рассчитанный пороговый уровень, расчет которого может выполняться как на основе численных или натурных экспериментов, так и аналитически. Оценка параметров объекта выполняется на основании номеров строк и столбцов последовательности матриц функций взаимной корреляции, для которой был обнаружен объект. Дальность объекта вычисляется как дальность, соответствующая столбцу матрицы, в котором последовательность функций взаимной корреляции превышает пороговый уровень, а скорость объекта вычисляется как скорость, соответствующая строке матрицы, в которой последовательность функций взаимной корреляции превышает пороговый уровень. Таким образом, i-й обнаруженный объект будет иметь дальность Li и скорость υi.
Можно заметить, что распространение сигнала по тракту обработки происходит не мгновенно, а требует определенного, но заранее неизвестного времени, которое может изменяться в зависимости от условий эксплуатации способа и системы.
Целесообразно разделить временные задержки следующим образом:
- t01 - задержка распространения сигнала от выхода управления частотой зондирующего сигнала процессора до входа смесителя приемного устройства;
- τ01 - задержка распространения сигнала в усилителе мощности передающего устройства до излучения передающей антенной антенно-фидерного устройства;
- τ02 - задержка распространения сигнала от приемной антенны антенно-фидерного устройства до входа смесителя приемного устройства;
- t02 - задержка распространения сигнала от выхода смесителя приемного устройства через аналого-цифровой преобразователь и шину данных до входа коррелометра.
При учете указанных временных задержек процессы в системе примут вид:





и при неизменности матриц базисных сигналов (3, 4) матрицы значений функции корреляции станут равными:


Вышеприведенные формулы (15-18) показывают, что в системе присутствует систематическая ошибка измерения, равная Lerr, обусловленная задержками вида τ0х.
Также качество обработки информации будет зависеть от временной синхронизации аналого-цифровых частей системы, что можно заметить при рассмотрении влияния задержек вида t0x на взаимно корреляционные функции базисных сигналов (19, 20). Ширина главного лепестка взаимно корреляционной функции мала, и при увеличении задержки t0 более половины ширины главного лепестка взаимно корреляционной функции значительно уменьшается уровень сигнала на выходе коррелометра, что в отдельных случаях делает невозможным обнаружение полезного сигнала, а также приводит к появлению ложных целей.
Таким образом, учет временных задержек распространения сигналов в тракте обработке необходим.
Для устранения влияния на работу системы временных задержек вида t0x и максимального уменьшения влияния временных задержек вида τ0х необходимо их оценивать и корректировать на основе этих оценок метод обнаружения объектов и определения их характеристик.
Оценку временных задержек можно выполнить методом, аналогичным методу обнаружения объектов. Для этого зондирующий сигнал ослабляется и суммируется с принятыми, отраженными от зондируемых объектов, сигналами. На выходе смесителя после фильтрации формируется гомодинный сигнал. Цифроаналоговым преобразованием из гомодинного сигнала и дополнительным линейным преобразованием над полученным цифровым сигналом формируется эталонный сигнал, представляющий собой оцифрованный гомодинный сигнал одиночного (при отсутствии иных) объекта с "нулевой" дальностью. Объект, соответствующий эталонному сигналу, называется далее эталонным объектом. Задержки распространения сигналов в тракте обработки влияют на дальность эталонного объекта, которую можно оценить корреляционно-фильтровым методом, последовательно формируя матрицы функций взаимной корреляции эталонного и базисных сигналов и выявляя дальность эталонного объекта сравнением последовательностей функций взаимной корреляции с заранее определенным порогом.
При отсутствии задержек вида τ0х дальность эталонного объекта будет равна нулю, а при их наличии будет ненулевой и может составлять существенную величину.
При отсутствии задержек вида t0x матрицы функций взаимной корреляции будут формироваться на основании максимумов корреляционных функций, а при наличии - на основании боковых граней основного лепестка корреляционных функций, или даже минимумов между основным (боковым) и боковыми лепестками корреляционных функций.
Можно показать, что эталонный сигнал вычисляется как сигнал обратной связи с выхода передающего устройства (ослабленный зондирующий сигнал) на вход приемного устройства при отсутствии сигналов, отраженных от лоцируемых целей. В этом случае эталонный сигнал будет равен:

Отсутствие сигналов, отраженных от лоцируемых целей, можно обеспечить, например, увеличением коэффициента передачи петли обратной связи с выхода передающего устройства на вход приемного устройства. При этом уровень эталонного сигнала после корреляционной обработки будет значительно превышать уровни сигналов, отраженных от лоцируемых целей, и выделение эталонного сигнала из смеси сигналов не будет представлять сложностей.
Коррелометр выполняет вычисление матрицы значений функций взаимной корреляции матрицы базисных сигналов и каждого из фрагментов эталонного сигнала, обнаружение объекта с минимальной дальностью (эталонного объекта) путем выявления элемента матрицы функций взаимной корреляции, значения которого превышают заданный пороговый уровень, и определение дальности обнаруженного объекта по номеру столбца выявленного элемента. Дальность эталонного объекта будет соответствовать систематической ошибке измерения локатора способа- и системы-прототипа, которая равна Lerr (см. формулу (15)).
Процессор использует оценку Lerr для корректировки дальности i-й цели согласно формуле:

где Lуточн - уточненная дальность объекта после устранения систематической ошибки измерения, L - дальность до объекта, включающая систематическую ошибку измерения, Lerr - систематическая ошибка измерения.
Используя эталонный сигнал, коррелометр вычисляет временной сдвиг максимума функции взаимной корреляции для объекта с минимальной дальностью, для этого формируются последовательности основной и квадратурной матриц корреляционных сигналов:


где tn - диапазон предполагаемых величин задержки t0.
По индексу элемента матриц n корреляционных сигналов, содержащему максимальные абсолютные значения, определяется  , являющееся оценкой временной задержки t0. Также оценка временной задержки t0 может вычисляться по индексу элемента матриц n корреляционных сигналов, содержащему максимальную сумму квадратов элементов основной и квадратурной матриц или содержащему иную величину, определяемую целевой функцией, полученной аналитически или моделированием системы.
, являющееся оценкой временной задержки t0. Также оценка временной задержки t0 может вычисляться по индексу элемента матриц n корреляционных сигналов, содержащему максимальную сумму квадратов элементов основной и квадратурной матриц или содержащему иную величину, определяемую целевой функцией, полученной аналитически или моделированием системы.
Процессор, используя значение  , корректирует работу коррелометра в соответствии с формулами:
, корректирует работу коррелометра в соответствии с формулами:


Для этого процессор корректирует базисные функции и по запросу коррелометра по шине данных вместо базисных функций  ,
,  возвращает значения
возвращает значения  ,
,  , что не приводит к увеличению вычислительной сложности процессора.
, что не приводит к увеличению вычислительной сложности процессора.
Оценки параметров Lerr и  могут быть уточнены, например, фильтрацией последовательности оценок в течение нескольких периодов зондирующего сигнала или, например, фильтрацией с предсказанием, аналогичной фильтрации Калмана.
могут быть уточнены, например, фильтрацией последовательности оценок в течение нескольких периодов зондирующего сигнала или, например, фильтрацией с предсказанием, аналогичной фильтрации Калмана.
При проектировании системы расчетная минимальная величина задержки t0 может оказаться малой независимо от диапазона изменения τ0 (в зависимости от условий работы системы). В этом случае эталонный сигнал должен быть сформирован с использованием линии задержки, включенной между аттенюатором и первым входом сумматора, то есть зондирующий сигнал ослабляют, затем задерживают и лишь после этого добавляют к принятым отраженным от зондируемых целей сигналам в сумматоре. Линия задержки имеет фиксированную временную задержку τзд, причем задержка распространения сигнала по линии задержки может принимать значения в следующем диапазоне:

где τздо - величина задержки, определяемая минимальной обнаруживаемой дальностью цели.
При этом изменится фаза гармоник гомодинного и эталонного сигналов:


Дальность обнаруженного объекта, определяемого эталонным сигналом, будет равна Lerr+Lзд - систематической ошибке измерения локатора. Процессор использует оценку Lerr+Lзд для корректировки дальности i-й цели согласно формуле:

Коррекция работы коррелометра, определенная выше формулами (15-18), не изменяется при формировании базисных сигналов согласно формулам (18-19).
Целесообразно согласно изобретению вычислять оценки задержек t0 и τ0 в заданные моменты времени, например вычислять оценки задержек лишь при включении системы. При этом не увеличивается вычислительная сложность системы по сравнению с системой-прототипом в процессе работы, но устраняется систематическая ошибка измерения дальности и выполняется временная синхронизация цифровой и аналоговой частей системы. Также возможно вычислять оценки задержек через заданные промежутки времени, например через 1 час, или в моменты времени, когда происходит изменение условий функционирования системы, например температура окружающей среды изменилась на 5°С по сравнению с моментом последней оценки временных параметров системы.
Также в реальной системе при использовании совмещенной приемопередающей антенны часть мощности зондирующего сигнала за счет недостаточной развязки циркулятора, а также за счет отражений от антенны сигнала попадает на вход канала приема. В этом случае возможно отказаться от регулируемого аттенюатора и сумматора мощности, так как их роль выполняет циркулятор, то есть в нем ослабляется зондирующий сигнал и суммируется с принятыми, отраженными от зондируемых объектов сигналами. При этом выход приемной части АФУ (циркулятора) соединяется со входом приемопередающего устройства, а блоки аттенюатора и сумматора исключаются из системы. Однако в отличие от системы-прототипа сохраняется вычисление временных задержек в тракте обработки сигналов согласно изобретению, а также применяются корректировки дальности и базисных сигналов.
При многопозиционном приеме отраженных сигналов в каждой позиции приема у принимаемого сигнала, отраженного от зондируемого объекта, будет различный фазовый набег относительно других позиций. Фазовый набег будет определяться различием расстояний между приемными антеннами и зондируемым объектом и может быть вычислен как:

где αi,s - угол между нормалью отрезка, соединяющего позиции, и направлением на i-й объект, Ds - расстояние между нулевой позицией (s=0) и позицией s. С учетом случайной начальной фазы начальная фаза отраженного от зондируемого объекта сигнала в s-м канале приема равна:

где  - случайная начальная фаза сигнала, отраженного от i-й зондируемой цели.
- случайная начальная фаза сигнала, отраженного от i-й зондируемой цели.
В случае многопозиционного приема отраженных сигналов формируются трехмерные основная и квадратурная матрицы базисных сигналов, где первым двум измерениям соответствуют дальность и скорость зондируемых объектов, а третьему - номер позиции приема:




где s - номер приемной позиции.
Зондируемый диапазон дальностей и скоростей разбивается на поддиапазоны необходимой протяженности, минимальная величина которых определяется корреляционными свойствами зондирующего сигнала, и для центра каждого поддиапазона для каждой приемной позиции рассчитываются основной и квадратурный базисные сигналы 
Также в случае многопозиционного приема отраженных сигналов возможно формировать четырехмерные основную и квадратурную матрицы базисных сигналов, где первым двум измерениям соответствуют дальность и скорость зондируемых объектов, третьему - азимутальная координата зондируемых объектов, а четвертому - номер позиции приема:




Зондируемый диапазон дальностей, скоростей и азимутов разбивается на поддиапазоны необходимой протяженности, минимальная величина которых определяется корреляционными свойствами зондирующего сигнала, и для центра каждого поддиапазона для каждой приемной позиции рассчитываются основной и квадратурный базисные сигналы 
Формируются последовательности матриц функций взаимной корреляции, на основании которых решающим устройством обнаруживаются объекты и оцениваются их параметры (дальность, скорость, азимут (только для четырехмерных базисных матриц и матриц функций взаимной корреляции)):




Также в случае многопозиционного приема формируются последовательности матриц корреляционных сигналов, при формировании которых суммируют элементы многомерных матриц функций взаимной корреляции по всем позициям приема:




Целесообразно согласно изобретению формировать элементы матриц корреляционных сигналов с использованием взвешенного суммирования:




где ks - весовые коэффициенты по позициям приема, определяемые аналитически или в процессе моделирования.
Обнаружение объектов выполняется процессором по превышению последовательностями матриц корреляционных сигналов заданного порога. Оценка параметров объекта выполняется на основании номеров строк и столбцов последовательности матриц функций взаимной корреляции, для которой был обнаружен объект. Дальность объекта вычисляется как дальность, соответствующая первому измерению столбца матрицы, в котором последовательность функций взаимной корреляции превышает пороговый уровень, скорость объекта вычисляется как скорость, соответствующая строке матрицы, в которой последовательность функций взаимной корреляции превышает пороговый уровень, и азимутальная координата объекта вычисляется как азимут, соответствующий второму измерению столбца матрицы, в котором последовательность функций взаимной корреляции превышает пороговый уровень. Таким образом, i-й обнаруженный объект будет иметь дальность Li, скорость υi и азимут αi. Азимут объекта вычисляется, если при обработке сигналов используются четырехмерные основная и квадратурная матрицы базисных сигналов, при использовании трехмерных основной и квадратурной матрицы базисных сигналов азимут объекта не вычисляется.
Можно показать, что аналогично случаю однопозиционного приема в тракте обработки сигналов присутствуют временные задержки, причем для каждого приемного канала величина задержек может быть различной:





где Lerr,s - систематическая ошибка измерения дальности для s-й приемной позиции.
Для устранения влияния временных задержек в тракте обработки сигналов на качество их обработки в случае многопозиционного приема отраженных сигналов выполняется оценка временных задержек для тракта обработки сигналов каждой позиции приема. Для этого в каждой позиции приема зондирующий сигнал ослабляется и суммируется с принятыми, отраженными от зондируемых объектов, сигналами. На выходе смесителя после фильтрации формируется гомодинный сигнал. Цифроаналоговым преобразованием из гомодинного сигнала и дополнительным линейным преобразованием над полученным цифровым сигналом формируется эталонный сигнал, представляющий собой оцифрованный гомодинный сигнал одиночного (при отсутствии иных) объекта с "нулевой" дальностью. Задержки распространения сигналов в тракте обработки влияют на дальность этого объекта, которую можно оценить корреляционно-фильтровым методом, последовательно формируя матрицы функций взаимной корреляции эталонного и базисных сигналов и выявляя дальность объекта сравнением последовательностей функций взаимной корреляции с заранее определенным порогом.
Коррелометр для каждой позиции приема вычисляет эталонный сигнал, формируя при этом матрицу эталонных сигналов, и определяет для каждой позиции приема аналогично однопозиционному варианту величины Lerr,s и  , где s - номер позиции приема отраженных сигналов:
, где s - номер позиции приема отраженных сигналов:

Оценки Lerr,s фильтруются (характеристики фильтра определяются аналитически или на основе моделирования) для формирования систематической ошибки измерения дальности Lerr. Например, используется метод взвешенного суммирования:

где ls - весовые коэффициенты по позициям приема. Весовые коэффициенты ls, например, могут быть равны коэффициентам ks, используемым в формулах (48-51), и определяются аналитически или по результатам моделирования.
В случае многопозиционного приема отраженных сигналов процессор использует оценки Lerr для корректировки дальности i-й цели согласно формуле:

И для каждой позиции приема процессор по запросу коррелометра по шине данных вместо базисных функций  ,
,  возвращает значения
возвращает значения  ,
,  , а для случая обработки трехмерных матриц базисных сигналов вместо
, а для случая обработки трехмерных матриц базисных сигналов вместо  ,
,  возвращает значения
возвращает значения  ,
,  .
.
При реализации способа и системы многопозиционного приема, излагаемых в изобретении, можно использовать вычисление оценок временных задержек в тракте распространения сигналов лишь в одном из каналов приема, выбранном заранее, в то время как оценки временных задержек в других каналах приема полагать равными оценкам временных задержек в выбранном канале. В этом случае формирование эталонного сигнала будет выполняться лишь в выбранном канале, и операции ослабления и суммирования радиочастотных сигналов будут выполняться тоже лишь в выбранном канале. Но корректировка значений дальности и базисных функций будут выполнять во всех каналах приема.
При реализации способа и системы многопозиционного приема целесообразно согласно изобретению вычислять оценки задержек t0 и τ0 в заданные моменты времени, например вычислять оценки задержек лишь при включении системы. При этом не увеличивается вычислительная сложность способа и системы по сравнению со способом и системой прототипом в процессе работы, но устраняется систематическая ошибка измерения дальности и выполняется временная синхронизация цифровой и аналоговой частей системы. Также возможно вычислять оценки задержек через заданные промежутки времени, например через 1 час, или в моменты времени, когда происходит изменение условий функционирования системы, например температура окружающей среды изменилась на 5°С по сравнению с моментом последней оценки временных параметров системы.
Далее изобретение поясняется с помощью чертежей, где:
- на фигуре 1 представлена общая структурная схема системы для измерения скоростей и координат объектов,
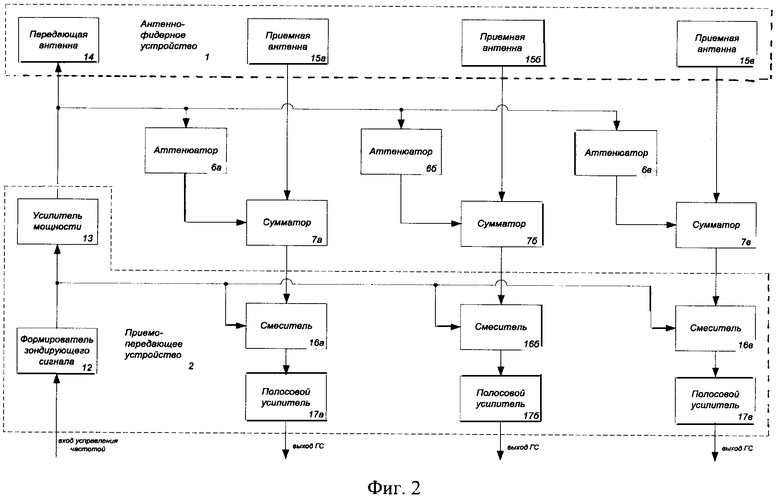
- на фигуре 2 представлена схема соединенных приемопередающего и антенно-фидерного устройств системы для измерения скоростей и координат объектов.
Система для измерения скоростей и координат объектов (см. фигуру 1) содержит антенно-фидерное устройство (АФУ) 1, приемопередающее устройство (ППУ) 2, аналого-цифровой преобразователь (АЦП) 3, процессор 4, коррелометр 5, аттенюатор 6, сумматор 7, дисплей 8 и шину данных 9. ППУ 2 состоит из приемного устройства 10 и передающего устройства 11. Микроволновый выход ППУ 2, являющийся также выходом передающего устройства 11, подключен к входу АФУ 1 и входам аттенюатора 6, а выходы АФУ 1 подключены к первым входам сумматора 7. Выходы аттенюатора 6 подключены ко вторым входам сумматора 7, выходы которого подключены к входам ППУ 2, являющимся также входами приемного устройства 10. К выходам гомодинного сигнала (ГС) ППУ 2, являющимися также выходами приемного устройства 10, подключены входы аналого-цифрового преобразователя 3. При этом могут использоваться как несколько АЦП, подключенные к соответствующим выходам ППУ 2, так и единственный АЦП, подключенный либо непосредственно к единственному выходу ГС ППУ 2, либо через коммутатор (на фигурах не показано), входящий в состав АЦП 3 и управляемый коррелометром 5, - к нескольким выходам ГС ППУ 2. АЦП 3, коррелометр 5, процессор 4 и дисплей 8 соединены шиной передачи цифровых данных 9 (далее - шина данных), которая может быть связана с внешней информационной сетью. Передающее устройство 11 ППУ 2 имеет вход управления частотой зондирующего сигнала, соединенный с аналоговым выходом процессора 4.
Схема соединенных приемопередающего и антенно-фидерного устройств системы (см. фигуру 2) содержит АФУ 1, ППУ 2, аттенюаторы 6а, 6б, 6в и сумматоры 7а, 7б, 7в, причем количество аттенюаторов и сумматоров определяется количеством приемных каналов ППУ 2. ППУ 2 содержит формирователь зондирующего сигнала 12, вход которого подключен к процессору 4 (на фигуре не показан), а выход к усилителю мощности 13, выход которого является микроволновым выходом ППУ 2 и подключен к микроволновому входу АФУ 1, вход которого является входом передающей антенны 14. АФУ 1 также содержит приемные антенны 15а, 15б, 15в, количество которых определяется количеством приемных каналов ППУ 2, выходы приемных антенн 15а, 15б, 15в подключены к микроволновым выходам АФУ 1, которые соединены с первыми входами сумматоров 7а, 7б, 7в. Вторые входы сумматоров 7а, 7б, 7в соединены с микроволновым выходом ППУ 2 через аттенюаторы 6а, 6б, 6в, причем входы всех аттенюаторов 6а, 6б, 6в соединены с микроволновым выходом ППУ 2. Выходы сумматоров 7а, 7б, 7в соединены с микроволновыми входами ППУ 2. ППУ 2 также содержит смесители 16а, 16б, 16в по количеству приемных каналов ППУ 2, причем первые входы смесителей подключены к микроволновым входам ППУ 2, а вторые входы - к выходу формирователя зондирующего сигнала 10. Выходы смесителей 16а, 16б, 16в через полосовые усилители 17а, 17б, 17в, которые тоже содержит ППУ 2, соединены с выходами гомодинных сигналов ППУ 2.
Предлагаемый способ измерения скоростей и координат объектов с использованием предлагаемой системы осуществляют следующим образом.
Передающим устройством 11 приемопередающего устройства 2 формируют периодически модулированный по частоте зондирующий микроволновый сигнал, передают его в антенно-фидерное устройство 1, посредством которого излучают его в пространство и принимают в одной или нескольких пространственных позициях отраженный от объектов сигнал. С помощью процессора 4 формируют периодический сигнал управления частотой зондирующего сигнала (модулирующий сигнал) и передают его в аналоговой форме на вход управления частотой зондирующего сигнала ППУ 2, а в цифровой форме через шину данных - в коррелометр 5. Излучаемый сигнал ослабляют аттенюаторами 6 и добавляют (суммируют) к принятым АФУ 1 сигналам в сумматорах 7, с выхода которых сигнал передают в ППУ 2. В приемном устройстве 10 ППУ 2 принятые сигналы отдельно перемножают (смешивают) с зондирующим сигналом и, выделяя низкочастотные (разностные) компоненты результатов перемножения, получают гомодинные сигналы, по одному на каждую позицию приема, усиливают заданную часть их спектра и направляют на соответствующие выходы гомодинного сигнала ППУ 2. Аналого-цифровым преобразователем 3 усиленные гомодинные сигналы переводят в цифровой код и передают через шину данных в коррелометр 5, где формируют из них последовательности цифровых фрагментов сигнала промежуточных частот заданной длительности. На базе модулирующего сигнала процессором 4 в каждой позиции приема формируют двумерные или трехмерные матрицы базисных сигналов, номера столбцов первого измерения которых соответствуют множеству средних ожидаемых значений дальности, номера столбцов второго измерения - множеству средних ожидаемых значений угловой координаты (азимута), а номера строк - множеству средних ожидаемых значений скорости. Также процессор может быть наделен базой данных базисных сигналов. При многопозиционном приеме указанные матрицы формируются для каждой позиции отдельно. На основе принятых оцифрованных АЦП 3 гомодинных сигналов коррелометром 5 вычисляют эталонные сигналы, по одному для каждой позиции приема, и коррелометром 5 по эталонным сигналам и матрицам базисных сигналов формируют последовательности основной и квадратурной матриц значений функций взаимной корреляции эталонных и базисных сигналов. По матрицам последовательностей функций взаимной корреляции эталонных и базисных сигналов в процессоре 4, сравнивая уровни элементов вычисленных матриц с пороговыми уровнями, вычисляют оценки задержек распространения сигналов в системе. Затем в соответствии с оценками задержек распространения сигналов матрицы базисных сигналов корректируют (синхронизируют) в процессоре 4. В каждой позиции коррелометром 5 вычисляют последовательности матриц значений функций взаимной корреляции откорректированных матриц базисных сигналов и каждого из фрагментов принятого в позиции сигнала ПЧ, а также суммарные по позициям или группам позиций последовательности матриц функций корреляции. При многопозиционном приеме вычисляют суммарные по позициям приема матрицы корреляционных сигналов. Полученную информацию передают в процессор 4, который, сравнивая уровни вычисленных функций корреляции с пороговыми уровнями, обнаруживает объекты и определяет их скорости и координаты. В процессоре 4 уточняют координаты объектов на основе оценок задержек распространения сигналов в системе. При необходимости информацию, полученную процессором, отображают на дисплее 8 или передают через шину данных 9 во внешнюю информационную сеть для дальнейшей обработки.
В случае многопозиционного приема (см. фигуру 2) частотно-модулированный зондирующий сигнал формирователя 12 усиливают в усилителе мощности 13 и подают через микроволновый выход ППУ 2 на вход АФУ 1, где излучают его передающей антенной 14 (или приемопередающей антенной). Отраженные, принятые приемными антеннами 15а, 15б, 15в сигналы с выходов АФУ 1 в сумматорах 7а, 7б, 7в суммируют с ослабленным аттенюаторами 6а, 6б, 6в зондирующим сигналом с выхода усилителя мощности 13. С выхода сумматоров 7а, 7б, 7в сигналы через микроволновые входы ППУ 2 подают на смесители 16а, 16б, 16в, где смешивают (перемножают) с сигналом формирователя 12, то есть с излучаемым сигналом. Полученные на выходе смесителей 16а, 16б, 16в гомодинные сигналы усиливают в заданной полосе частот полосовыми усилителями 17а, 17б, 17в и подают на соответствующие выходы ГС ППУ 2.
Все упомянутые узлы могут быть выполнены любым известным способом, а именно в качестве антенн АФУ 1 могут быть использованы, например, рупорные антенны, формирователь зондирующего сигнала 12 ППУ 2 основан, например, на твердотельном генераторе на диоде Ганна с электронной перестройкой частоты варактором, а усилитель мощности 13 ППУ 2 может быть выполнен на любом стандартном усилительном модуле СВЧ, аттенюаторы 6 и сумматоры 7 основаны, например, на одном из типов направленных ответвителей, в качестве смесителей 16 могут быть использованы, например, балансные смесители, процессор 4 и коррелометр 5 могут быть выполнены, например, на ПЛИС или на сигнальном процессоре, а шина данных 9 может быть, например, любой параллельной или последовательной шиной данных, АЦП 3 может быть любым из известных аналого-цифровых преобразователей, дисплей 8 также может быть любым из известных типов дисплеев.
Таким образом, предлагаемый способ и система для его осуществления по сравнению со способом- и системой-прототипом имеет следующие преимущества:
- устранение зависимости качества обработки от временной синхронизации аналого-цифровых частей системы;
- увеличение стабильности измеряемых характеристик за счет синхронизации аналоговой и цифровой части системы;
- устранение зависимости обнаруженной дальности объектов от временных задержек в трактах приемопередающих устройств и устройств анализа гомодинного сигнала;
- повышение точности измерения дальности за счет устранения систематической ошибки измерения дальности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2255352C2 |
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2002 |
|
RU2239845C2 |
| Приёмо-передающее устройство гомодинного радиолокатора | 2021 |
|
RU2787976C1 |
| Способ обработки цифрового радиолокационного сигнала и радиолокатор обнаружения препятствий высокого разрешения | 2022 |
|
RU2792971C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И РАДИАЛЬНОЙ СКОРОСТИ | 2024 |
|
RU2840790C1 |
| РАДИОЛОКАТОР С НЕПРЕРЫВНЫМ ШУМОВЫМ СИГНАЛОМ И СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА ИЗМЕРЯЕМЫХ ДАЛЬНОСТЕЙ В РАДИОЛОКАТОРЕ С НЕПРЕРЫВНЫМ СИГНАЛОМ | 2015 |
|
RU2589036C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕЛИЧИНОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2013 |
|
RU2533198C1 |
| Способ обработки радиолокационных сигналов в импульсно-доплеровской радиолокационной станции с активной фазированной антенной решеткой | 2021 |
|
RU2760409C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ СИГНАЛА, ОТРАЖЕННОГО ОТ ЗЕМНОЙ ПОВЕРХНОСТИ, В РЕЖИМЕ КАРТОГРАФИРОВАНИЯ РЕАЛЬНЫМ ЛУЧОМ | 2013 |
|
RU2530544C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ И ИЗМЕРЕНИЯ ИХ ПАРАМЕТРОВ ДВИЖЕНИЯ В ЗОНЕ СЕЛЕКЦИИ И РАДИОЛОКАЦИОННЫЙ ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ | 2021 |
|
RU2783402C1 |
Предлагаемое изобретение относится к области радиоэлектроники, в частности ближней радиолокации, и может быть использовано в составе систем комплексного обеспечения безопасности. Достигаемый технический результат - повышение точности измерения дальности за счет устранения систематической ошибки измерения дальности и увеличение стабильности измеряемых характеристик за счет синхронизации аналоговой и цифровой части системы. Заявленный способ имеет два варианта. Первый вариант включает излучение периодически модулированного по частоте зондирующего сигнала, прием отраженных от объектов сигналов, перемножение излучаемого и принятых сигналов, усиление полученного в результате перемножения гомодинного сигнала, формирование линейным и аналого-цифровым преобразованиями из гомодинного сигнала сигнала промежуточных частот в виде последовательности цифровых фрагментов заданной длительности, формирование основной двумерной матрицы базисных сигналов и квадратурной по отношению к основной, номера столбцов которых соответствуют множеству средних ожидаемых значений дальности, а номера строк - множеству средних ожидаемых значений скорости отражающих объектов, вычисление последовательности основных и квадратурных матриц значений функций взаимной корреляции матриц базисных сигналов и каждого из фрагментов сигнала промежуточных частот, обнаружение объектов путем выявления элементов матриц функций взаимной корреляции любого фрагмента, значения которых превышают заданный пороговый уровень, и определение дальности и скорости обнаруженных объектов по номерам, соответственно, столбца и строки выявленных элементов, согласно изобретению излучаемый периодически модулированный по частоте зондирующий сигнал ослабляют и добавляют к принятым отраженным от объектов сигналам, линейным преобразованием цифровых отсчетов полученного сигнала промежуточных частот формируют эталонный сигнал, вычисляют функцию взаимной корреляции базисных сигналов и эталонного сигнала, по которой определяют объект с минимальной дальностью, вычисляют временной сдвиг максимума функции взаимной корреляции базисного сигнала, соответствующего объекту с минимальной дальностью, и эталонного сигнала, корректируют на основе определенных значений дальности обнаруженных объектов и основную и квадратурную матрицы базисных сигналов. Второй вариант способа отличается многопозиционным приемом. Первый и второй варианты способов реализуются с помощью систем, выполненных соответствующим образом. 4 н. и 2 з.п. ф-лы, 2 ил.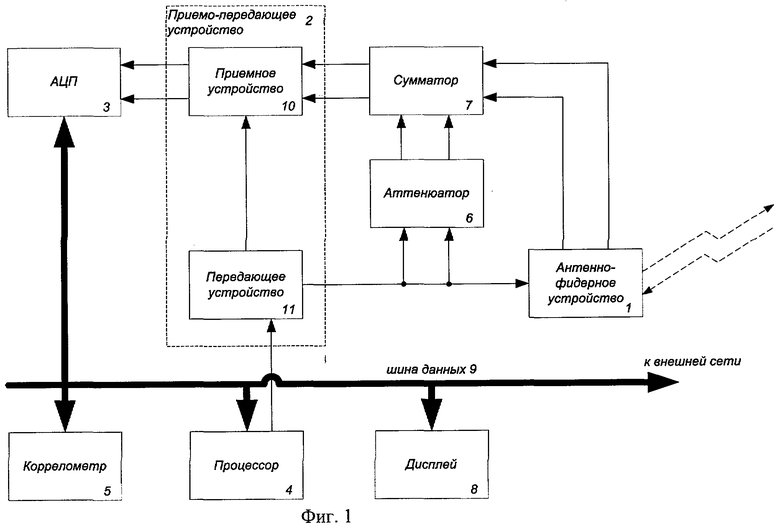
1. Способ радиолокационного измерения скоростей и координат объектов, включающий излучение периодически модулированного по частоте зондирующего сигнала, прием отраженных от объектов сигналов, перемножение излучаемого и принятых сигналов, усиление полученного в результате перемножения гомодинного сигнала, формирование линейным и аналого-цифровым преобразованиями из гомодинного сигнала сигнала промежуточных частот в виде последовательности цифровых фрагментов заданной длительности, формирование основной двумерной матрицы базисных сигналов и квадратурной по отношению к основной, номера столбцов которых соответствуют множеству средних ожидаемых значений дальности, а номера строк - множеству средних ожидаемых значений скорости отражающих объектов, вычисление последовательности основных и квадратурных матриц значений функций взаимной корреляции матриц базисных сигналов и каждого из фрагментов сигнала промежуточных частот, обнаружение объектов путем выявления элементов матриц функций взаимной корреляции любого фрагмента, значения которых превышают заданный пороговый уровень, и определение дальности и скорости обнаруженных объектов по номерам, соответственно, столбца и строки выявленных элементов, отличающийся тем, что излучаемый периодически модулированный по частоте зондирующий сигнал ослабляют и добавляют к принятым отраженным от объектов сигналам, дополнительным линейным преобразованием цифровых отсчетов полученного сигнала промежуточных частот формируют эталонный сигнал, вычисляют функцию взаимной корреляции базисных сигналов и эталонного сигнала, по которой определяют объект с минимальной дальностью, принимаемый за эталонный объект, вычисляют временной сдвиг максимума функции взаимной корреляции базисного сигнала, соответствующего эталонному объекту с минимальной дальностью, и эталонного сигнала, и на основании вычисленного временного сдвига корректируют основную и квадратурную матрицы базисных сигналов, соответствующие определенным значениям дальностей обнаруженных объектов, устраняя систематическую ошибку измерения дальности.
2. Способ по п.1, отличающийся тем, что излучаемый периодически модулированный по частоте зондирующий сигнал ослабляют и добавляют к принятым отраженным от объектов сигналам в заданные моменты времени, формируют эталонный сигнал, при этом коррекцию основной и квадратурной матриц базисных сигналов выполняют синхронно добавлению ослабленного модулированного по частоте зондирующего сигнала к принятым отраженным от объектов сигналам.
3. Способ радиолокационного измерения скоростей и координат объектов, включающий излучение периодически модулированного по частоте зондирующего сигнала, прием отраженных от объектов сигналов, по крайней мере, в двух позициях, пространственно отнесенных друг от друга, перемножение излучаемого и принятых сигналов, усиление полученных в результате перемножения гомодинных сигналов, в каждой позиции линейным и аналого-цифровым преобразованиями гомодинного сигнала формирование сигнала промежуточных частот в виде последовательности цифровых фрагментов заданной длительности, формирование трехмерной основной матрицы базисных сигналов и квадратурной, по отношению к основной, номера столбцов первого измерения которых соответствуют множеству средних ожидаемых значений дальности, номера столбцов второго измерения - множеству средних ожидаемых значений угловой координаты, а номера строк - множеству средних ожидаемых значений скорости отражающих объектов, вычисление в каждой позиции последовательности основных и квадратурных матриц значений функций взаимной корреляции матриц базисных сигналов и каждого из фрагментов сигнала промежуточных частот, соответственно количеству фрагментов вычисление последовательности суммарных основных и квадратурных матриц путем суммирования соответствующих столбцу и строке значений функций взаимной корреляции, полученных во всех позициях, обнаружение объектов путем выявления элементов любой суммарной матрицы функций взаимной корреляции, значения которых превышают заданный пороговый уровень, и определение дальности, угловой координаты и скорости обнаруженных объектов по номерам, соответственно, столбцов и строки выявленных элементов, отличающийся тем, что излучаемый периодически модулированный по частоте зондирующий сигнал ослабляют и в каждой пространственной позиции приема добавляют к принятым отраженным от объектов сигналам, линейным преобразованием цифровых отсчетов полученного сигнала промежуточных частот формируют матрицу эталонных сигналов, вычисляют матрицу функций взаимной корреляции базисных сигналов и эталонных сигналов, по которой определяют объекты с минимальной дальностью, по одному объекту для каждой пространственной позиции приема, определяют временные сдвиги максимумов функций взаимной корреляции базисных сигналов, соответствующих определенным объектам с минимальной дальностью, и эталонных сигналов по одному временному сдвигу для каждой пространственной позиции, и на основании определяемых временных сдвигов корректируют основную и квадратурную матрицы базисных сигналов, соответствующие определенным значениям дальностей обнаруженных объектов, устраняя систематическую ошибку измерения дальности.
4. Способ по п.3, отличающийся тем, что излучаемый периодически модулированный по частоте зондирующий сигнал ослабляют и добавляют к принятым отраженным от объектов сигналам в заданные моменты времени, при этом коррекцию основной и квадратурной матриц базисных сигналов выполняют синхронно добавлению ослабленного модулированного по частоте зондирующего сигнала к принятым отраженным от объектов сигналам.
5. Система для радиолокационного измерения скоростей и координат отражающих объектов, содержащая антенно-фидерное устройство, обеспечивающее излучение зондирующего и прием отраженных от измеряемых объектов сигналов, приемопередающее устройство, обеспечивающее формирование зондирующего сигнала, перемножение с ним принятых сигналов и усиление полученного гомодинного сигнала, причем выход передающего устройства приемопередающего устройства соединен с входом антенно-фидерного устройства, а также соединенные шиной данных аналого-цифровой преобразователь и процессор, предназначенный для формирования периодического сигнала управления частотой зондирующего сигнала и передачи его в аналоговой форме на вход управления частотой зондирующего сигнала передающего устройства приемопередающего устройства, а в цифровой форме - через шину данных в коррелометр, а также для формирования матриц базисных сигналов, вычисления оценок задержек распространения сигналов в системе, для коррекции матриц базисных сигналов, для обнаружения объектов, определения их скоростей и координат и уточнения координат объектов на основе оценок задержек распространения сигналов в системе, вход управления частотой зондирующего сигнала и выход гомодинного сигнала приемопередающего устройства соединены соответственно с выходом процессора и входом аналого-цифрового преобразователя, коррелометр, соединенный шиной данных с аналого-цифровым преобразователем и процессором, отличающаяся тем, что в систему введены аттенюатор и сумматор, причем вход аттенюатора соединен с выходом передающего устройства, выход аттенюатора подключен к первому входу сумматора, второй вход сумматора соединен с выходом антенно-фидерного устройства, выход сумматора соединен с входом приемного устройства приемопередающего устройства.
6. Система для радиолокационного измерения скоростей и координат отражающих объектов, содержащая антенно-фидерное устройство, обеспечивающее излучение зондирующего и прием отраженных от измеряемых объектов сигналов, приемопередающее устройство, обеспечивающее формирование зондирующего сигнала, перемножение с ним принятых сигналов и усиление полученного гомодинного сигнала, причем выходы передающего устройства приемопередающего устройства соединены с входами антенно-фидерного устройства при помощи аттенюаторов и сумматоров, причем входы аттенюаторов соединены с выходами передающего устройства приемопередающего устройства, выходы аттенюаторов подключены к первым входам сумматоров, вторые входы сумматоров соединены с выходами антенно-фидерного устройства, выходы сумматоров соединены с входами приемного устройства приемопередающего устройства, а также соединенные шиной данных аналого-цифровой преобразователь и процессор, предназначенный для формирования периодического сигнала управления частотой зондирующего сигнала и передачи его в аналоговой форме на вход управления частотой зондирующего сигнала передающего устройства приемопередающего устройства, а в цифровой форме - через шину данных в коррелометр, а также для формирования матриц базисных сигналов, вычисления оценок задержек распространения сигналов в системе, для коррекции матриц базисных сигналов, для обнаружения объектов, определения их скоростей и координат и уточнения координат объектов на основе оценок задержек распространения сигналов в системе, вход управления частотой зондирующего сигнала и выход гомодинного сигнала приемопередающего устройства соединены соответственно с выходом процессора и входом аналого-цифрового преобразователя, коррелометр, соединенный шиной данных с аналого-цифровым преобразователем и процессором, отличающаяся тем, что приемопередающее устройство содержит формирователь зондирующего сигнала, усилитель мощности, несколько, по крайней мере, два выхода гомодинных сигналов, смесителей и полосовых усилителей, количество аттенюаторов и сумматоров равно количеству выходов гомодинных сигналов приемопередающего устройства, антенно-фидерное устройство содержит передающую антенну и несколько по числу смесителей приемных антенн, подключенных соответственно к микроволновому выходу и микроволновым входам антенно-фидерного устройства, причем выход формирователя зондирующего сигнала подключен через усилитель мощности к микроволновому выходу приемопередающего устройства, соединенному с микроволновым входом антенно-фидерного устройства и входами аттенюаторов, вход управления частотой зондирующего сигнала является входом управления частотой зондирующего сигнала приемопередающего устройства, первые входы смесителей подключены к микроволновым входам приемопередающего устройства, соединенным с выходами сумматоров, первые входы которых подключены через линии задержки к выходам аттенюаторов, а вторые - к микроволновым выходам антенно-фидерного устройства, вторые входы смесителей подключены к выходу формирователя зондирующего сигнала, а выходы соединены через полосовые усилители с выходами гомодинных сигналов приемопередающего устройства, подключенными к входам аналого-цифрового преобразователя, который выполнен с несколькими входами, количество которых равно количеству выходов гомодинных сигналов.
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2255352C2 |
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ БЫСТРОДВИЖУЩИХСЯ ЦЕЛЕЙ | 2005 |
|
RU2293997C1 |
| СПОСОБ АНАЛОГО-ДИСКРЕТНОЙ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ ИМПУЛЬСНЫХ СИГНАЛОВ | 2004 |
|
RU2291463C2 |
| УСТРОЙСТВО РАЗРЕШЕНИЯ РАДИОИМПУЛЬСНЫХ СИГНАЛОВ НА ФОНЕ ПРОИЗВОЛЬНОЙ ПОМЕХИ | 2004 |
|
RU2269205C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПО КРИТЕРИЮ ОТНОШЕНИЯ ПРАВДОПОДОБИЯ ПАЧЕЧНОГО СИГНАЛА С ОГИБАЮЩЕЙ ИЗВЕСТНОЙ ФОРМЫ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269142C2 |
| US 6362775 B1, 26.03.2002 | |||
| JP 3100484 A, 25.04.1991 | |||
| US 4305074 A, 08.12.1981. | |||

