Изобретение относится к ракетно-космической технике и может быть использовано в отраслях промышленности, занимающихся проектированием и созданием космических аппаратов (КА), предназначенных для спуска с орбиты в атмосфере планеты.
Известны КА "Восток", "Восход", "Меркурий" для спуска с орбиты искусственного спутника Земли (ОИСЗ) [1].
Известен способ спуска КА в атмосфере Земли, включающий ориентацию и торможение аппарата перед входом в атмосферу, ввод средств обеспечения посадки КА (см. там же).
Недостатками известных технических решений являются:
- отсутствие возможности произвести боковой маневр по отношению к плоскости траектории спуска из-за практически нулевого аэродинамического качества КА:
- большие перегрузки (nmax=8-10), а также отклонение фактической точки посадки от заданной, обусловленные неуправляемым аэродинамическим торможением.
Известны КА типа "несущий корпус" M2-F1, HL-10, X-24A [2], [3]. КА этого класса содержат несущий корпус с размещенным в нем блоком полезной нагрузки, аэродинамические средства управления по каналам тангажа, рыскания и крена.
Известен также способ спуска этих КА в атмосфере Земли, включающий ориентацию и торможение КА перед входом в атмосферу Земли, стабилизацию его по каналам тангажа, рыскания и крена аэродинамическими средствами управления при спуске в атмосфере Земли (см. там же).
КА этого класса имеют аэродинамическое качество при полете на дозвуковых - трансзвуковых скоростях (К=3) и сверхзвуковых - гиперзвуковых скоростях (К= 1.2), необходимое для обеспечения планирующего спуска в атмосфере с маневром по боковой дальности и в продольном направлении.
Недостатками этих технических решений являются:
- неудовлетворительные аэродинамические характеристики по углам крена, рыскания;
- низкая плотность заполнения внутреннего объема полезным грузом, приходящаяся на единицу поверхности КА;
- отсутствие возможности компоновки аппаратов этого типа в пределах внешних обводов РН;
- неудовлетворительные компоновочные характеристики в составе КА в случае появления орбитальных отсеков (ОС) или необходимости совершить переход на борт космического корабля.
Известны также и широко применяются:
- КА "Союз" для спуска в атмосфере Земли, содержащий теплоизолированный корпус с затупленной лобовой частью, донный экран, реактивную систему управления (РСУ) полетом на атмосферном участке, блок полезной нагрузки, комплекс средств обеспечения посадки (КСП). КА имеет сегментально-коническую форму с обратным конусом, лобовой сферический сегмент служит элементом поверхности. КСП состоит из двигателей мягкой посадки и автоматики управления;
- способ спуска космического аппарата в атмосфере Земли, включающий ориентацию и торможение аппарата перед входом в атмосферу Земли, стабилизацию его в атмосфере по каналам тангажа, рыскания и крена, ввод средств обеспечения посадки КА [4].
Аппараты этого класса осуществляют спуск на балансировочном угле атаки и используют аэродинамическую подъемную силу, обеспечивающую аэродинамическое качество на гиперзвуковых скоростях К=0,2-0,5. Они позволяют также уменьшить перегрузку и интенсивность аэродинамического нагрева, а также произвести незначительный маневр с посадкой в заданном районе.
Недостатками указанных технических решений являются:
- ограниченные маневренные возможности КА по боковой дальности, поскольку КА этого типа имеют небольшое аэродинамическое качество и осуществляют спуск только в заданном "коридоре входа" в атмосфере Земли;
- существенные перегрузки (nmах=4-5).
Наиболее близкими техническими решениями и принятыми авторами за прототипы являются:
- КА для спуска в атмосфере планеты, содержащий несущий теплоизолированный корпус с затупленной носовой частью, донный экран, газодинамические средства управления полетом на атмосферном участке траектории, блок полезной нагрузки, комплекс средств обеспечения посадки. В нем корпус аппарата выполнен в виде соединенных верхней и нижней, обращенной к потоку, частей корпуса с донным экраном и снабжен кормовым щитком, при этом нижняя часть корпуса и кормовой щиток выполнены в виде элементов сферического сегмента, сопряженного с затупленной носовой частью аппарата и образованного радиусом с центром в точке, расположенной на линии пересечения продольной плоскости симметрии аппарата и поперечной плоскости, проведенной за центром масс аппарата по направлению к донному экрану, а донный экран выполнен сферической формы, образованной радиусом с центром в точке, расположенной в поперечной плоскости, проведенной через центр масс аппарата, при этом кормовой щиток выполнен разрезным и установлен шарнирно с возможностью управления аппаратом по каналам тангажа и крена [5];
- способ спуска КА в атмосфере планеты, включающий ориентацию и торможение аппарата перед входом в атмосферу планеты, стабилизацию его в атмосфере по каналам тангажа, рыскания и крена, ввод средств обеспечения посадки аппарата. В интервале от гиперзвуковых до сверхзвуковых скоростей полета кормовой щиток отклоняют на программные углы в плоскостях тангажа и крена и одновременно стабилизируют аппарат на балансировочном угле атаки при отклоненных щитках газодинамическими средствами управления. При этом производят определение текущих координат и скоростей аппарата, сравнивают их с программными и в случае их расхождения вводят корректирующие поправки на программные углы отклонения кормового щитка по углам крена и тангажа, после чего вводят средства обеспечения посадки аппарата (см. там же).
Приведенные технические решения позволяют:
- обеспечить боковую дальность полета КА до 1000 км и минимальное отклонение координат точки посадки от заданных за счет обеспечения аэродинамического качества КА (К=1.2) на гиперзвуковых скоростях полета;
- снизить нагрузки на систему управления за счет минимальной разбежки центра давления КА при полете на гиперзвуковых скоростях;
- расширить эксплуатационный диапазон допустимых центровок КА за счет щитков, сдвигающих центр давления КА в зону потребной балансировки аппарата при заданном угле атаки (в отличие от КА типа "Союз");
- обеспечить максимальную плотность заполнения внутреннего объема и возможность расположения КА внутри обводов РН за счет исключения аэродинамических органов управления КА "самолетного" класса;
- упростить технологию изготовления отдельных элементов корпуса КА, поскольку они являются элементами сферической или конической поверхностей.
Недостатками указанных технических решений являются:
- изменение продольной и боковой дальностей полета осуществляют только посредством отклонения кормового разрезного балансировочного щитка с обеспечением необходимых углов атаки и аэродинамического качества, что приводит к увеличению времени полета, расхода топлива РСУ и ухудшению теплового режима при полете аппарата в атмосфере на участке спуска с орбиты. Это приводит к ограничению маневренных возможностей КА по продольной и боковой дальностям полета;
- статическая аэродинамическая неустойчивость аппарата по каналу рыскания не может быть улучшена только при отклонении кормового разрезного балансировочного щитка, что также приводит к увеличению расхода рабочего тела РСУ на режимах управления и стабилизации аппарата относительно центра масс при полете в атмосфере на участке спуска с орбиты.
Задачей изобретения является расширение маневренных возможностей и улучшение эксплуатационных характеристик КА при обеспечении статической устойчивости по каналу рыскания, уменьшении расхода топлива РСУ и улучшении теплового режима при полете аппарата в атмосфере на участке спуска с орбиты.
Техническими результатами использования изобретения являются:
- изменение продольной и боковой дальностей полета в заданных пределах при одновременном раскрытии боковых щитков;
- улучшение аэродинамических характеристик устойчивости по каналу рыскания m
- исключение работы РСУ или уменьшение расхода топлива РСУ на стабилизацию КА при работе боковых щитков;
- уменьшение теплового нагрева и повышение ресурса работы тепловой защиты и конструкции КА.
Технические результаты достигаются тем, что в известном КА для спуска в атмосфере планеты, содержащем несущий теплоизолированный корпус с затупленной носовой частью, донную защиту, газодинамические средства управления и стабилизации КА на атмосферном участке траектории полета, блок полезной нагрузки, комплекс средств обеспечения посадки, в котором корпус аппарата выполнен в виде соединенных верхней и нижней частей с донной защитой и снабжен кормовым разрезным по оси симметрии щитком, а нижняя часть корпуса выполнена в виде сферического сегмента, сопряженного с затупленной носовой частью и образованного радиусом с центром в точке, расположенной на линии пересечения продольной плоскости симметрии аппарата и поперечной плоскости, проведенной за центром масс аппарата по направлению к донной защите, донная защита выполнена сферической формы, образованной радиусом с центром в точке, расположенной в поперечной плоскости, проведенной через центр масс аппарата, при этом кормовой разрезной щиток установлен шарнирно с возможностью управления аппаратом по каналам тангажа и крена, согласно изобретению аппарат дополнительно снабжен аэродинамическими средствами управления дальностью полета, управления и стабилизации по каналу рыскания, выполненными в виде, по крайней мере, двух боковых щитков, шарнирно установленных на боковой поверхности кормовой части аппарата и расположенных заподлицо с боковой поверхностью аппарата в исходном положении с возможностью поворота щитков в рабочее положение соответственно на одинаковые или различные углы относительно боковой поверхности, при этом оси поворота щитков лежат на боковой поверхности аппарата.
Технические результаты достигаются также тем (вариант 1), что в известном способе, включающем ориентацию и торможение аппарата перед входом в атмосферу, стабилизацию его в атмосфере по каналам тангажа, рыскания и крена, ввод средств обеспечения посадки аппарата, в котором в интервале от гиперзвуковых до сверхзвуковых скоростей полета отклоняют кормовой щиток на программные углы по тангажу и крену и одновременно стабилизируют аппарат на балансировочном угле атаки при отклоненном кормовом щитке, при котором производят определение текущих координат и скоростей аппарата, сравнивают их с программными и в случае их расхождения вводят корректирующие поправки на программные углы отклонения кормового щитка по углам крена и тангажа, после чего вводят средства обеспечения посадки аппарата, согласно изобретению отклонение кормового разрезного щитка на программные углы по тангажу и крену осуществляют одновременно с отклонением боковых щитков на одинаковые углы относительно боковой поверхности аппарата, при этом обеспечивают стабилизацию и устойчивость по каналу рыскания отклонением только боковых щитков на одинаковые углы.
Технические результаты достигаются также тем (вариант 2), что в отличие от варианта 1, согласно изобретению отклонение кормового разрезного щитка на программные углы по тангажу и крену осуществляют одновременно с отклонением боковых щитков на различные углы относительно боковой поверхности аппарата, при этом обеспечивают стабилизацию, устойчивость и балансировку по каналу рыскания отклонением боковых щитков на различные углы и разрезного кормового щитка одновременно.
Сущность изобретения поясняется графически на примере КА, предназначенного для спуска с ОИСЗ на поверхность Земли.
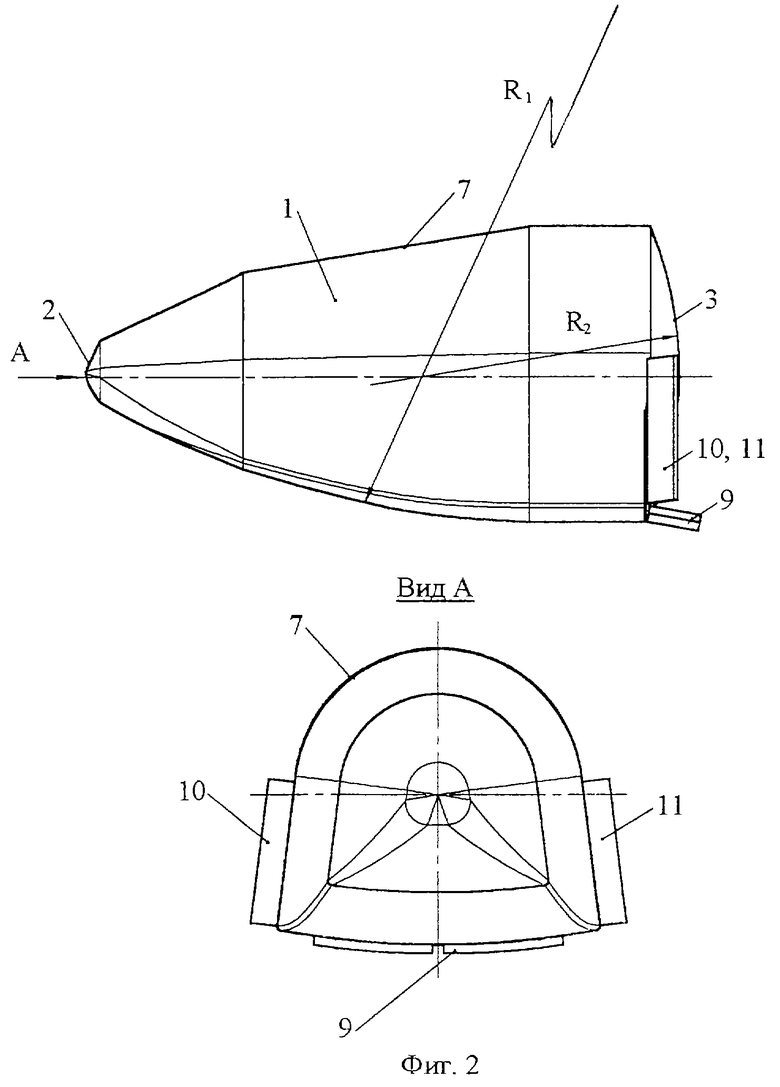
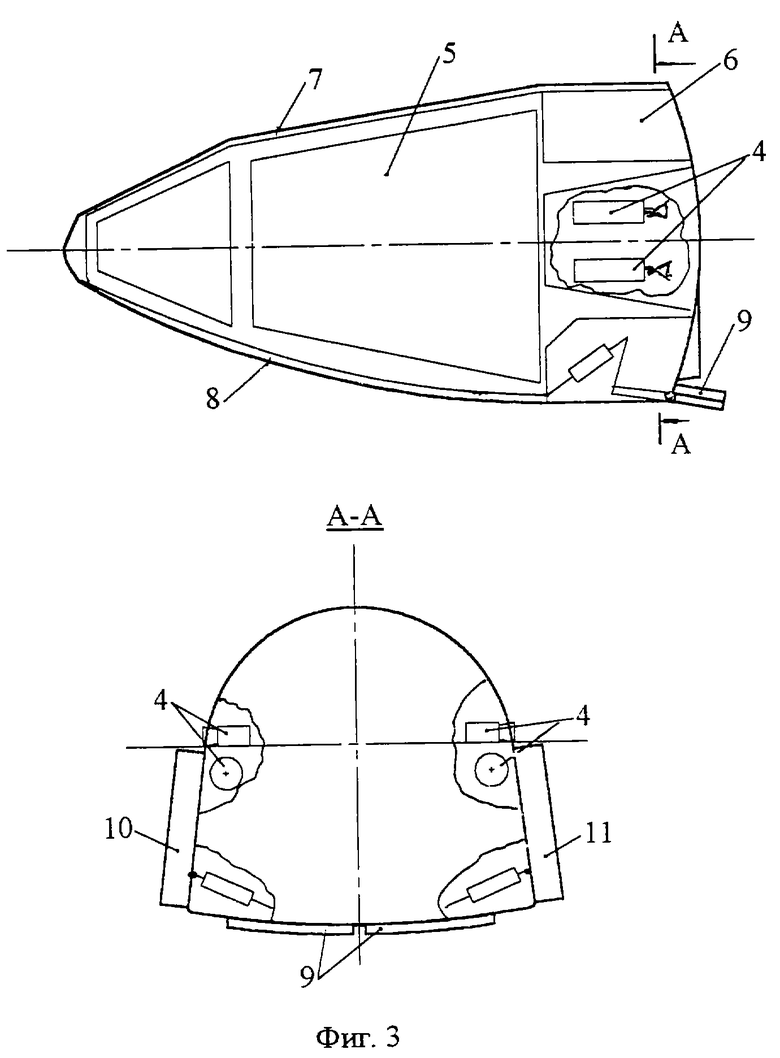
На фиг.1 приведен общий вид компоновки КА, на фиг.2 показана схема построения аэродинамических обводов КА, на фиг.3 показаны основные его элементы КА, где:
1 - несущий теплоизолированный корпус;
2 - затупленная носовая часть;
3 - донная защита;
4 - газодинамические средства управления и стабилизации КА;
5 - блок полезной нагрузки;
6 - комплекс средств обеспечения посадки;
7 - верхняя часть корпуса;
8 - нижняя часть корпуса;
9 - разрезной кормовой щиток;
10, 11 - боковые щитки.
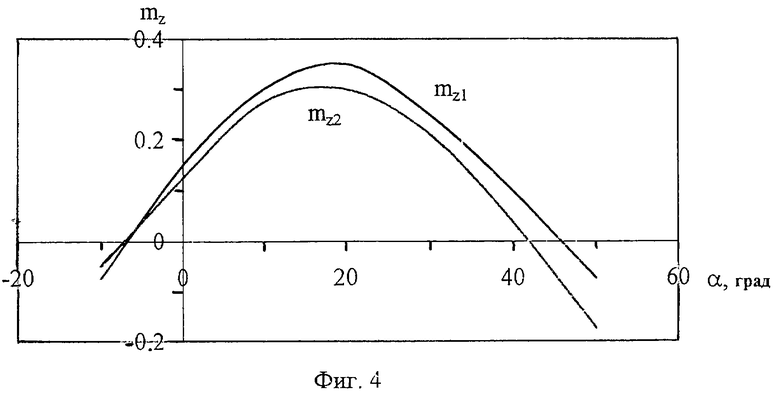
На фиг.4 приведены зависимости коэффициента продольного момента mz1, mz2 от угла атаки α для КА с закрытыми и раскрытыми под углом к набегающему потоку δ= 45o боковыми щитками, соответственно. Здесь и далее принята скоростная система координат, а данные соответствуют гиперзвуковым и сверхзвуковым скоростям полета (М=22-10).
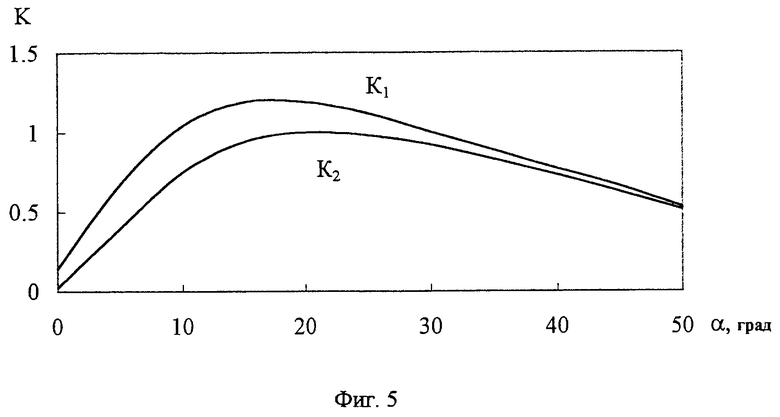
На фиг.5 приведены зависимости аэродинамического качества K1, К2 от угла атаки α для КА с закрытыми и раскрытыми под углом к набегающему потоку δ=45o боковыми щитками, соответственно, (здесь К=Суa/Сxa).
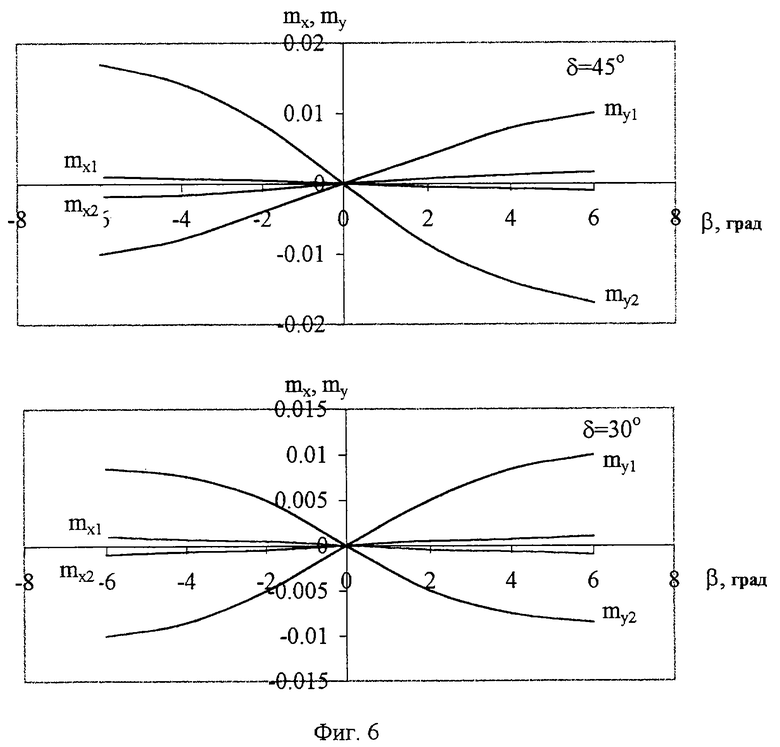
На фиг.6 приведены зависимости коэффициентов момента рыскания mу1, mу2 и момента крена mx1, mx2 по углу скольжения β при угле атаки α=45o для КА с закрытыми и раскрытыми под углом к набегающему потоку δ=45o и 30o боковыми щитками, соответственно.
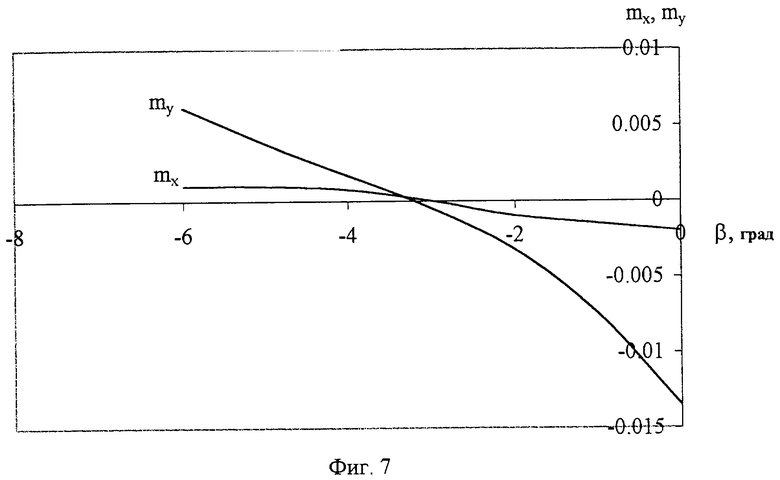
На фиг. 7 приведен пример одновременного использования боковых щитков и кормового разрезного щитка при угле атаки α=45o. Данные для mх(β) и mу(β) соответствуют отклонениям бокового правого (по направлению полета) щитка на угол δ= 45o, левого - на угол δ=35o, левого кормового щитка на угол δ=-5o и правого - на угол δ=5o.
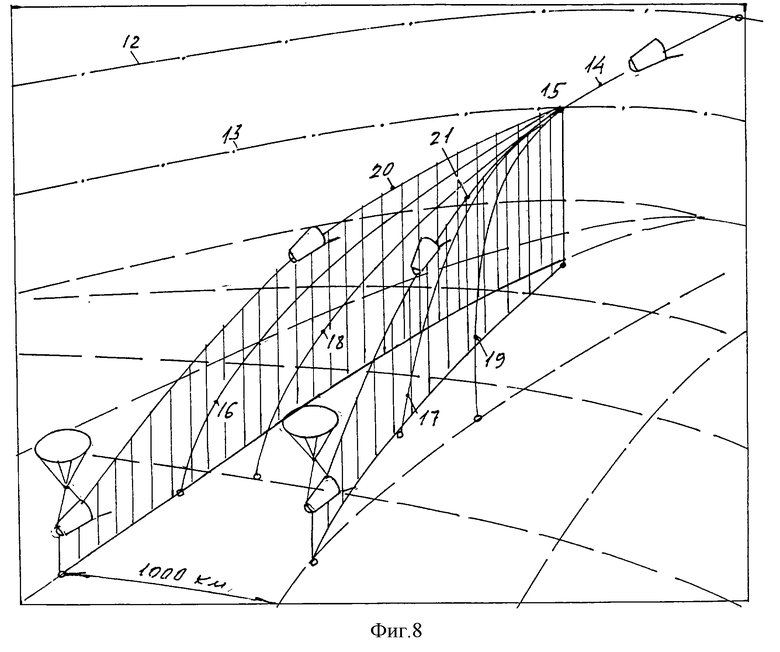
На фиг.8 приведена схема полета КА с маневрами соответственно по продольной и боковой дальностям полета, где:
12 - ОИСЗ;
13 - условная граница атмосферы;
14 - траектория торможения КА;
15 - точка входа в атмосферу;
16, 17 - схема полета при управлении кормовым щитком и отклонении боковых щитков на одинаковые углы (вариант 1);
18, 19 - схема полета при управлении кормовым щитком и отклонении боковых щитков на различные углы (вариант 2);
20, 21 - схема полета при управлении только разрезным кормовым щитком.
КА (фиг. 1-3) для спуска в атмосфере планеты содержит несущий теплоизолированный корпус 1 с затупленной носовой частью 2, донную защиту 3, газодинамические средства управления и стабилизации КА 4 на атмосферном участке траектории, блок полезной нагрузки 5, комплекс средств обеспечения посадки 6. Корпус аппарата выполнен в виде соединенных верхней 7 и нижней 8 частей с донной защитой 3 и снабжен разрезным по оси симметрии кормовым щитком 9.
Нижняя часть корпуса 8 выполнена в виде сферического сегмента, сопряженного с затупленной носовой частью 2 и образованного радиусом R1 с центром в точке, расположенной на линии пересечения продольной плоскости симметрии аппарата и поперечной плоскости, проведенной за центром масс аппарата по направлению к донной защите 3. Донная защита 3 выполнена сферической формы, образованной радиусом R2 с центром в точке, расположенной в поперечной плоскости, проведенной через центр масс аппарата. Разрезной кормовой щиток 9 установлен шарнирно с возможностью управления аппаратом по каналам тангажа и крена. Выполнение образующей нижней части корпуса 8 с заданным таким образом радиусом обеспечивает минимальную разбежку центра давления относительно центра масс КА по числам Маха полета, поскольку главный вектор аэродинамических сил, действующих на несущую поверхность КА, проходит через центр окружности, выполненный этим радиусом. При этом вектор аэродинамических сил, действующих на донную защиту 3 КА, проходит через его центр масс.
КА дополнительно снабжен аэродинамическими средствами управления дальностью полета, управления и стабилизации по каналу рыскания, выполненными в виде, по крайней мере, двух боковых щитков 10 и 11, шарнирно установленных на боковой поверхности кормовой части аппарата и расположенных заподлицо с боковой поверхностью аппарата в исходном положении с возможностью поворота щитков в рабочее положение соответственно на одинаковые или различные углы относительно боковой поверхности, при этом оси поворота щитков лежат на боковой поверхности аппарата.
В отличие от известного технического решения [6], для КА, совершающего полет с гиперзвуковыми и сверхзвуковыми скоростями на балансировочном угле атаки, в котором боковые щитки установлены в зоне затенения фюзеляжем, и поэтому на больших углах атаки (α=15-45o) аэродинамически не эффективны, в представленном техническом решении боковые щитки 10 и 11 установлены вне зоны затенения при полете на балансировочном угле атаки.
На фиг.4 и 5 приведен диапазон углов атаки α=15-45o при углах отклонения боковых щитков 10 и 11 δ=0 и 45o, в котором может быть выбран балансировочный угол атаки, обеспечивающий устойчивый полет КА на гиперзвуковых скоростях полета. При этом минимальное значение балансировочного угла атаки (α=15o) определяется максимальным аэродинамическим качеством К, а его максимальное значение (α=45o) - допустимыми тепловыми потоками к поверхности КА.
Из фиг.5 следует, что предложенная аэродинамическая компоновка КА в выбранном диапазоне балансировочных углов атаки при изменении угла поворота боковых щитков 10 и 11 в диапазоне δ=0-45o дает возможность изменять аэродинамическое качество в широких пределах при полете на гиперзвуковых и сверхзвуковых скоростях и, следовательно, управлять продольной и боковой дальностями полета, что расширяет маневренные возможности КА.
Изменение угла раскрытия боковых щитков 10, 11 одновременно с изменением аэродинамического качества КА приводит к улучшению аэродинамических характеристик устойчивости по каналу рыскания m
Из фиг. 6 также следует, что отклонение боковых щитков 10, 11 на углы δ приводит к незначительному изменению аэродинамических моментных характеристик по каналу крена m
σβ = m
(здесь σβ - характеристика поперечно-путевой устойчивости КА; Iуу, Ixx - главные моменты инерции КА относительно осей OY и ОХ, соответственно).
На фиг.7 приведен пример одновременного использования боковых щитков 10, 11 и разрезного кормового щитка 9 при полете на угле атаки α=45o. Для того чтобы повернуть аппарат на угол скольжения β=-3o достаточно, например, отклонить боковые щитки 10, 11 - левый на 35o, правый на 45o и одновременно разрезной кормовой щиток 9, создающий крен, левый на -5o, правый на 5o. При этом аппарат при β=-3o будет устойчив по всем каналам mz(α), mx(β) и mу(β). Таким образом, можно обеспечить разворот аппарата по углам крена и рыскания, используя боковые щитки 10 и 11 и разрезной кормовой щиток 9 так, что он будет устойчив. В этом случае работа РСУ и соответственно расход топлива исключаются.
Именно размещение боковых щитков 10 и 11 на поверхности кормовой части КА вне зоны затенения корпусом при полете на балансировочных углах атаки α= 15-45o, а также раскрытие их под заданным углом δ=0-45o к плоскости симметрии аппарата, наряду с отклонением разрезного кормового щитка 9, создает возможность управления КА по каналам крена и рыскания без использования РСУ как средства управления и стабилизации аппарата. Это приводит к исключению работы РСУ либо использованию ее как резервной.
За счет сокращения времени полета на атмосферном участке спуска уменьшается тепловой нагрев и повышается ресурс работы тепловой защиты и конструкции КА. Расчеты также показали, что тепловые потоки к несущей поверхности КА уменьшаются до 8%. Тем самым улучшаются эксплуатационные характеристики КА.
Таким образом, отклонение боковых щитков 10 и 11, по сравнению с отклонением только разрезного кормового щитка 9, позволяет улучшить маневренные и эксплуатационные характеристики КА при изменении продольной и боковой дальностей полета.
Спуск КА с ОИСЗ осуществляется следующим образом (фиг.8).
Сначала ориентируют КА на ОИСЗ 12 газодинамическими средствами управления и стабилизации КА4, обеспечивая угол наклона траектории на условной границе атмосферы 13, после чего производят торможение КА двигательной установкой. Аппарат совершает полет по траектории торможения КА 14 и входит в плотные слои атмосферы.
Затем обеспечивают планирующий полет КА. Программная траектория полета (бортовая или обеспечиваемая наземными средствами наведения) соответствует планирующему полету КА на балансировочном угле атаки и заданным углам раскрытия δ боковых щитков 10, 11. При этом аэродинамическая подъемная сила уравновешивает эффективно вес КА. Программная траектория определяется относительной скоростью КА как функция расстояния до заданной точки полета. Эта функция определяет запас кинетической энергии, необходимой для достижения точки ввода средств обеспечения посадкой КА.
Управление продольной и боковой дальностями осуществляют посредством отклонения балансировочного разрезного кормового щитка 9 по каналам тангажа или крена на одинаковые или различные углы, а боковых щитков 10 и 11 на одинаковые (вариант 1) или различные углы (вариант 2) в пределах балансировочного угла атаки аппарата α=15-45o, определяемого функцией разницы между программной скоростью и фактической (измеренной). Управление по рысканию производят путем отклонения боковых щитков 10 и 11 в диапазоне δ=0-45o при углах скольжения β, изменяющихся в диапазоне от -6o до 6o. Вектор скорости КА поворачивается в горизонтальной плоскости до тех пор, пока не будет лежать вдоль большого круга, проходящего через точку с координатами ввода комплекса средств обеспечения посадки 6.
На фиг.8 приведена схема полета КА с маневрами соответственно по продольной и боковой дальностям полета при управлении разрезным кормовым щитком 9 и отклонении боковых щитков 10 и 11 на одинаковые углы (вариант 1, поз. 16, 17), и при управлении разрезным кормовым щитком 9 и отклонении боковых щитков 10 и 11 на разные углы (вариант 2, поз. 18, 19) по сравнению с маневрами при управлении только разрезным кормовым щитком 9 (поз. 20, 21).
Таким образом, в интервале от гиперзвуковых до дозвуковых скоростей полета обеспечивают дополнительный, по сравнению с прототипом, маневр по продольной и боковой дальностям полета. При этом производят измерение текущих координат и скоростей аппарата, сравнивают их с программными, и в случае расхождения, вводят корректирующие поправки на программные углы отклонения боковых щитков 10 и 11 и разрезного кормового щитка 9 в плоскостях крена и тангажа.
Это позволяет значительно расширить диапазон возможных районов посадки, уменьшить отклонение от расчетной точки приземления и уменьшить время ожидания на орбите с целью обеспечения попадания в заданный район.
Когда требуется обеспечить спуск КА по траектории без бокового маневра, используются боковые щитки 10 и 11 для изменения аэродинамического качества КА и разрезной кормовой щиток 9 для изменения угла атаки.
После вывода КА в заданный район и уменьшения скорости до заданной и снижения до высоты Н~ 10 км вводят средства обеспечения посадки, при этом двигатели мягкой посадки и автоматика управления позволяют значительно снизить перегрузки в момент приземления.
Спускаемый аппарат данного класса входит в состав орбитальных космических летательных аппаратов (КЛА), используемых для исследовательских целей, как транспортное средство для доставки экипажей и грузов на орбитальные станции и как средство возвращения их на Землю.
Как показывает анализ располагаемых материалов, целесообразно использовать для спуска с ОИСЗ предлагаемый КА массой до 15 т, при этом реализуются компоновки КА в составе КЛА в случае появления орбитальных отсеков или необходимости совершить переход на борт космической станции.
Существенным преимуществом предлагаемого КА по сравнению с известными КА типа "несущий корпус", осуществляющими спуск по планирующим траекториям, является отсутствие развитых аэродинамических средств управления, и как следствие этого, возможность компоновки этого класса КА в пределах теоретических обводов существующих РН.
Анализ материалов систематических исследований по аэродинамическим характеристикам КА подтверждает правильность выбора аэродинамических характеристик для формирования траектории и обеспечения устойчивости и управляемости КА. Относительная простота формы КА, имеющаяся технологическая оснастка и опыт изготовления крупнопанельных конструкций сферической формы с нанесением теплозащитных материалов, возможность использования штатных систем позволяют реализовать предлагаемый КА в сравнительно короткие сроки.
Источники информации
1. Космонавтика, энциклопедия / Под ред. В.П. Глушко. - М.: Сов. энциклопедия, 1985, с.378.
2. Пилотируемые ЛА с несущим корпусом и их системы управления (обзор) // Вопросы ракетной техники, 12, 1972, с.19.
3. Патент США 3276722 от 4.10.1966.
4. Космонавтика, энциклопедия / Под ред. В.П. Глушко. - М.: Сов. энциклопедия, 1985, с.378, 415.
5. Патент РФ 2083448 С1, М. кл. 6 B 4 G 1/62.
6. Космический комплекс. Многоразовый орбитальный корабль "Буран"/ Под ред. члена-корреспондента Ю.П. Семенова и др. - М.: Машиностроение, 1995, с. 148.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА В АТМОСФЕРЕ ПЛАНЕТЫ И СПОСОБ СПУСКА КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 1994 |
|
RU2083448C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ И СПОСОБ ЕГО СПУСКА С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2005 |
|
RU2334656C2 |
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТ | 2012 |
|
RU2493059C1 |
| СПОСОБ СПУСКА В АТМОСФЕРЕ ОТДЕЛЯЕМОГО ОТ ГИПЕРЗВУКОВОГО ЛЕТАТЕЛЬНОГО АППАРАТА ЭЛЕМЕНТА, ОБЛАДАЮЩЕГО АЭРОДИНАМИЧЕСКИМ КАЧЕСТВОМ, И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1995 |
|
RU2086903C1 |
| Аэродинамическая система управления гиперзвукового летательного аппарата | 2016 |
|
RU2654236C1 |
| Аэродинамические исполнительные органы управления транспортного космического аппарата | 2021 |
|
RU2770895C1 |
| КОРПУС КОСМИЧЕСКОГО АППАРАТА ДЛЯ СПУСКА В АТМОСФЕРЕ ПЛАНЕТЫ | 2005 |
|
RU2295476C2 |
| Устройство аэродинамической системы управления летательного аппарата | 2022 |
|
RU2809201C1 |
| МНОГОРАЗОВЫЙ ОДНОСТУПЕНЧАТЫЙ НОСИТЕЛЬ | 2000 |
|
RU2196078C2 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ПОСАДКОЙ КОСМИЧЕСКОГО АППАРАТА | 1994 |
|
RU2097286C1 |
Изобретение относится к ракетно-космической технике и может быть использовано при проектировании спускаемых аппаратов с аэродинамическим качеством. Предлагаемый аппарат содержит теплоизолированный корпус с затупленной носовой частью, верхней и нижней частями и донной защитой, а также посадочные средства. Корпус снабжен кормовым, разрезным по оси симметрии щитком для управления по каналам крена и тангажа. Нижняя часть корпуса и донная защита выполнены сферической формы. Аппарат дополнительно снабжен по крайней мере двумя боковыми щитками - в качестве средств управления дальностью полета, балансировкой и стабилизацией по каналу рысканья. Оси поворота щитков лежат на боковой поверхности кормовой части корпуса аппарата. При спуске, в интервале от гиперзвуковых до сверхзвуковых скоростей полета одновременно с кормовым разрезным щитком отклоняют боковые щитки на одинаковые или разные углы, осуществляя, соответственно, устойчивую стабилизацию, либо также и балансировку по каналу рысканья. Изобретение позволяет исключить (зарезервировать) газореактивную систему для управления по каналам крена и рысканья, сократить время полета в атмосфере, уменьшив тем самым расход рабочего тела и нагрев корпуса, а также улучшить маневренные и эксплуатационные характеристики аппарата. 3 с.п. ф-лы, 8 ил.
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА В АТМОСФЕРЕ ПЛАНЕТЫ И СПОСОБ СПУСКА КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 1994 |
|
RU2083448C1 |
| СПУСКАЕМАЯ КАПСУЛА | 1992 |
|
RU2046078C1 |
| US 3276722 А, 04.10.1966 | |||
| US 3606212 А, 20.09.1971 | |||
| Пилотируемые ЛА с несущим корпусом и их системы управления | |||
| Вопросы ракетной техники, № 12, 1972, с.19. | |||
