Изобретение относится к ракетно-космической технике, а именно, к космическим аппаратам (КА) многоразового использования.
Задача обеспечения надежной посадки и сохранности КА с возможностью их дальнейшего использования как для беспилотных, так и пилотируемых КА, а также других летательных аппаратов (ЛА) постоянно актуальна.
Имеет практический интерес мягкая посадка КА многоразового использования не только на поверхность Земли, но и на поверхности других планет солнечной системы.
Известны устройства и способы посадки с использованием:
самолетных схем, когда ЛА садится горизонтально на посадочную полосу на шасси, с последующим торможением двигателем (реверс тяги), с использованием тормозных колодок, выпуском тормозных щитков или тормозных парашютов;
вертолетных схем взлета и посадки с использованием тяги винтов силовой установки ЛА;
вертикальной посадки на грунт с использованием парашютной системы и тормозного двигателя, гасящего посадочную скорость на заключительном участке спуска и др.
Известны устройства и способы осуществления мягкой посадки спускаемых КА, имеющих в своем составе посадочные двигательные установки (ДУ) с ракетными двигателями (РД) мягкой посадки, выдающие на заключительном этапе полета тормозной импульс.
В США ведутся экспериментальные летные испытания КА с вертикальным взлетом и посадкой (аппарат "Дельта Клиппер").
Одним из близких к предложенному устройству и способу мягкой посадки, принятым за аналог, являются устройства и способ мягкой посадки, реализованные на КА типа "Союз", "Союз-Т" и "Союз-ТМ".
Для полного гашения вертикальной скорости при посадке КА на заключительном этапе полета производится выдача тормозного импульса с помощью посадочного РД мягкой посадки с механизмами регулирования тяги РД и управления по осям стабилизации КА (тангажу, рысканию и крену).
Посадочный РД выдает тормозной импульс тяги по команде от системы управления (СУ) КА с выдерживанием вертикальной составляющей скорости в пределах от 3 6 м/с, при этом, горизонтальная составляющая минимальна.
К недостаткам упомянутых устройств и способа следует отнести трудности замера высоты перед выдачей тормозного импульса, необходимость отстрела лобового щита, исключающего многоразовость его использования, невозможность привода КА в намеченную точку посадки, что характерно для всех парашютно-двигательных систем и аппаратов с низким аэродинамическим качеством.
В качестве прототипа рассматривается устройство и способ посадки, используемые на КА одноразового использования.
Устройство посадки КА, выбранное за прототип, содержащее посадочную ДУ, связанную с корпусом КА неподвижным лобовым аэродинамическим экраном (щитом или донной защитой), РД оснащен механизмом регулирования тяги и управления положения аппарата по осям стабилизации КА.
Способ управления посадкой КА по прототипу, основанный на гашении скорости спуска регулированием импульса тормозной тяги, создаваемой посадочной ДУ с управлением положением КА по осям стабилизации.
Способ управления посадкой по прототипу характеризуется равномерным приложением тяги РД к периметру средней части КА в районе центра тяжести что практически исключает возможность появления донной тяги.
Расположенная на КА посадочная ДУ включается на высоте 0,7 км при скорости спуска 130 м/с и после ориентации КА в пространстве производит стабилизацию, торможение и управление вектором тяги путем рассогласованием тяги РД.
При приближении к поверхности Земли гасится суммарная скорость движения КА, РД регулируется по тяге от 50 до 100% по командам СУ (от высотомера и доплеровского измерителя скорости).
Оставшаяся непогашенной из-за различных погрешностей вертикальная и горизонтальная скорости от 0 до 2 м/с, воспринимается при ударе о грунт конструкцией сотового днища КА.
В качестве недостатков прототипа следует отметить воздействие струи на грунт, что ведет к его скоплению под днищем КА и появлению опрокидывающего момента, воздействию фрагментов выбиваемого грунта на донную защиту, что требует утяжеления (усиления) конструкции КА, а это в итоге затрудняет его многоразовое использование. Жесткое соприкосновение КА с грунтом также приводит к необходимости утяжеления КА.
Техническим результатом предлагаемого изобретения является повышение надежности выполнения посадки, долговечности и улучшению эксплуатационных характеристик КА.
Технический результат может быть достигнут тем, что в устройстве посадкой КА, содержащей посадочную ДУ, связанную с корпусом КА в районе его донной части, лобовой аэродинамический экран и средства управления положением управления положением КА по осям стабилизации, в отличии от прототипа посадочная ДУ выполнена с одним и более реактивными соплами, имеющими общее внутреннее критическое сечение, обеспечивающее истечение газа от периферии к центру указанной донной части корпуса КА, лобовой аэродинамический экран выполнен подвижным и снабжен приводами перемещения вдоль продольной оси корпуса КА из положения защиты донной части и двигательной установки аппарата при спуске в атмосфере в положение поверхности, ограничивающей изнутри указанное общее критическое сечение сопел, при этом средства управления положением аппарата по осям стабилизации выполнены в виде механизмов поворота лобового экрана по осям тангажа и рыскания, а также размещенных на внешней поверхности экрана интерцепторов, снабженных приводами их поворота.
Технический результат достигается тем, что в предлагаемом способе управления посадкой космического аппарата, основанном на гашении скорости спуска регулированием импульса тормозной тяги, создаваемой посадочной двигательной установкой с управлением положением аппарата по осям стабилизации, в отличии от прототипа тормозную тягу ракетного двигателя формируют в виде донной тяги, образованной центростремительным истечением газа из критического сечения сопла, донную тягу изменяют в заданный момент времени, определяемый начальной высотой космического аппарата над поверхностью грунта, для достижения заданной скорости спуска на заданной высоте, производят управление донной тягой по тангажу и рыканию путем изменения формы критического сечения сопла за счет изменения положения подвижного лобового аэродинамического экрана, а по крену -путем закрутки реактивного потока интерцепторами.
Тормозную тягу посадочного РД формируют в виде донной тяги, образованной центростремительным истечением газа из критического сечения сопла, донную тягу (Fд) изменяют в заданный момент времени, определяемый начальной высотой КА над поверхностью грунта для достижения заданной скорости спуска на заданной высоте по формуле:
Fд= K•[m•(Ho-Hз)/Δt2+g]•Sд (1)
где Fд донная тяга посадочного РД, H;
K безразмерный эмпирический коэффициент в диапазоне 0,8 0,95, зависящий от геометрии КА и термодинамических параметров потока (P давления, H/м2; V объема, м3; R газовой постоянной Дж/кг•K; G - веса, H; T температуры, K);
m масса КА, кг;
Hо высота начальная, м;
Hз высота заданная, м;
Δt время выключения посадочного РД, с;
g ускорение свободного падения, м/с2;
Sд площадь днища, м2.
В предлагаемом способе производят управление донной тягой (Fд) по тангажу и рысканию путем изменения формы критического сечения сопла за счет регулирования положения подвижного лобового аэродинамического экрана, а по крену путем закрутки реактивного потока, например, интерцепторами, впрыском топлива или вдувом газа и др.
На фиг. 1 показано предлагаемое устройство; на фиг. 2 посадка по прототипу; на фиг. 3 посадка по предлагаемому способу; на фиг. 4 истечение газов при работе РД; на фиг. 5 примеры уплотнения донного экрана.
Формула (1) выводится на основании баланса сил тяготения, донной тяги (Fд) посадочного РД и веса КА (G m•g), а именно: m•dv/dt F G или Fд m•dv/dt + m•g, откуда получаем Fд= m•(Δh/Δt2+g)
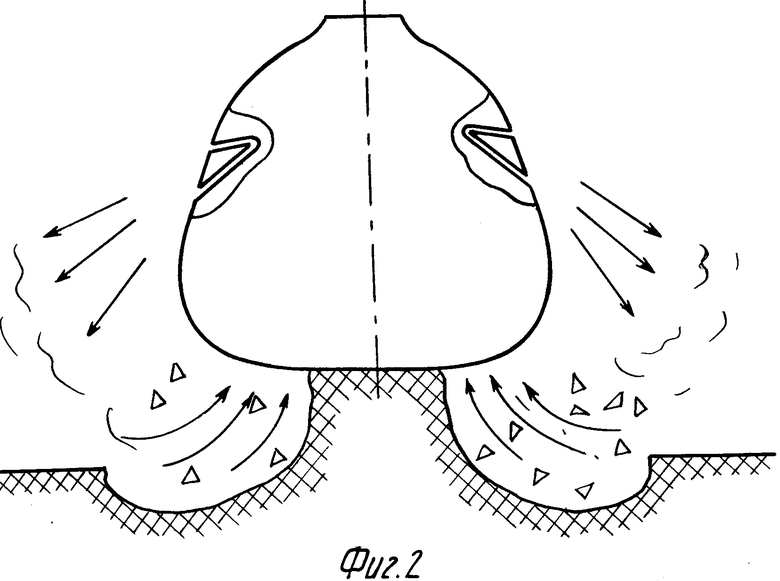
Высота управляемого спуска ( Δh ) или высота, на которой начинает проявляться эффект донной тяги, равняется разности начальной высоты и заданной, т.е. Hо Hз Δh (фиг. 3).
Время ( Δt ) выключения задается циклограммой работы тормозного посадочного РД автоматически по командам СУ КА.
Донную тягу (Fд) посадочного РД можно выразить через произведение среднего донного давления (Pд) и площадь днища (Sд) КА, а именно, Fд Pд• Sд, откуда Pд Fд/Sд, и после введения площади получим формулу (1), а формула относительно донного давления примет вид: Pд K•m•[(Hо-Hз/ Δt2 + g]Sд (2).
С учетом экспериментальных данных, полученных на плоских (aфото 1) газодинамических и осесимметричных газодинамических моделях, донная тяга (Fд) оказывается ниже на 5 20% по сравнению с вычисленной по среднему донному давлению (Pд) из-за сложности газодинамических эффектов, что вынуждает ввести в формулу (1) безразмерный эмпирический коэффициент K 0,8 - 0,95.
По достижении высоты начальной (Hо) включается программное устройство, исходя из условий допустимой предельной перегрузки на конструкцию.
Диапазон высоты начальной (Hо) для современного КА лежит в пределах от 1 до 3 диаметров его днища, так как с высоты, равной трем диаметрам днища (математическое ожидание по экспериментальным данным), начинает проявляться эффект донной тяги (воздушной подушки), а высота включения тяги менее одного диаметра днища (также математическое ожидание по экспериментальным данным) не гарантирует безопасность посадки из-за возможных отклонений параметров РД и неровностей грунта.
Начальная высота (Hо), равная одному диаметру днища, реализуется в случае использования прецизионных высотомеров.
Заданная высота (Hз) определяется из условия равенства расходов через сопла РД и сечения просвета между грунтом и днищем КА, деленная на длину периметра или окружности днища.
Для круглого днища Hз Sкр/2nr величина постоянная для конкретного КА:
где r радиус днища КА, м;
Sкр площадь критического сечения сопла РД, м2.
При подлете к поверхности посадки высота начальная (Hо) определяется длиной щупа (или начальной точкой другого типа высотомера как, например, гамма-высотомера, радио-высотомера и т.д.), в памяти которого заложена Hо f(t) для номинальной траектории посадки с учетом отклонений от номинальной.
При выдачи команды на включение РД и влияния конкретных массово-центровочных и инерционных характеристик КА вводиться эмпирический коэффициент K 0,8 0,95, полученный по результатам экспериментальной отработки [3] зависящий от геометрии КА и термодинамических параметров потока, т.е. K f (P, V, G, R, T).
Для днища КА квадратной формы следует принимать K 0,8, а для круглой - 0,95, при этом влияние термодинамических параметров оказывается вторичным и изменяет K незначительно (на 3 10%).
Ниже приводится пример расчета донного давления (Pд) по формуле (2) в зависимости от заданного времени выключения (Δt) посадочного РД (при t 0,5, 1, 2 и 3 с).
В расчетах принималось: днище КА диаметром 10 м, масса КА m 38000 кг, Hо 30 м, Hз 1 м, K 0,95, G m•g и площади днища диаметром 10 м.
После введения этих данных в формулу (2) и проведения расчетов получим цифровое выражение:
Данные расчета приведены в таблице.
Из таблицы видно, что донное давления увеличивается при уменьшении времени выключения посадочного РД.
Размещение посадочного РД в нижней части КА в отличии от прототипа создает максимальное значение донной тяги, которая прямо пропорциональна площади днища и давлению в камере сгорания.
Площадь днища КА выбирается при оптимизации массовых характеристик конкретного типа КА при проектной разработке.
Управляют полетом при посадке по тангажу и рысканию за счет смещения точки приложения равнодействующей импульса донной тяги при формировании управляющих сигналов от системы управления на механизмы изменения положения подвижного лобового экрана, по крену управляют путем закрутки реактивного потока, обнуляют центростремительный поток в заданный момент времени, определяемый касанием поверхности и/или равенством нулю вертикальной скорости.
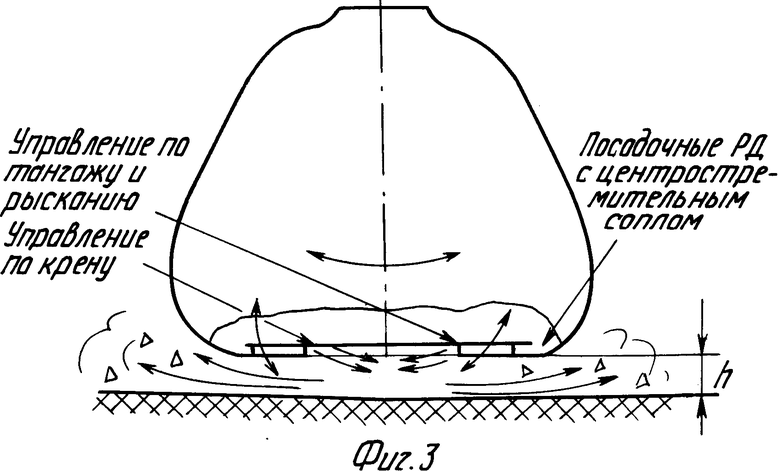
Строгое теоретическое обоснование возможности управления положением вектором тяги относительно продольной оси КА путем изменения положения лобового экрана иллюстрируется на фиг. 4, на которой представлена схема истечения газов:
а) при нулевом угле наклона экрана;
б) при отклоненном положении экрана.
Видно, что тяга создается за счет обратного тока, вызванного взаимодействием кольцевой струи от двигателя на некотором удалении от днища экрана.
Таким образом, уменьшение расхода газа с одной стороны щели и его увеличение с другой стороны приводит к смещению точки приложения равнодействующей силы донной тяги и наклону этой силы, что в сумме дает увеличение плеча L (фиг. 4) ее приложение относительно центра масс КА и создает тем самым необходимое управляющее усилие.
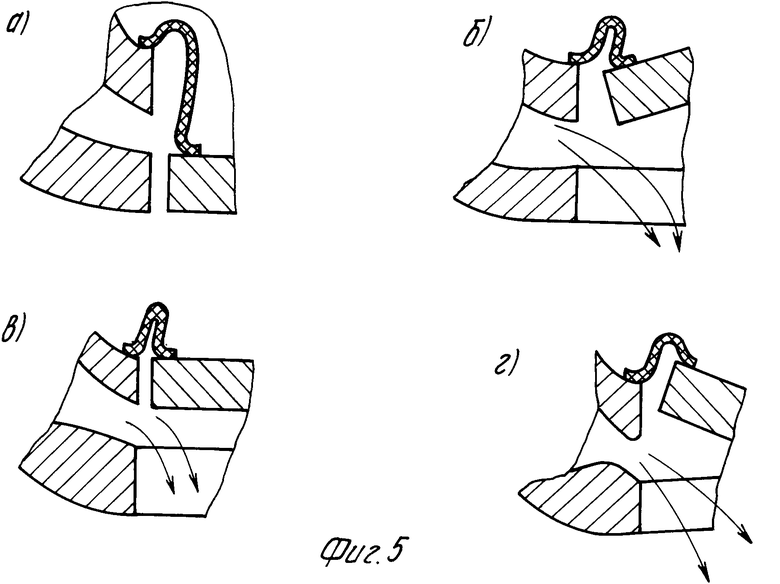
Затекание горячих газов потока при работе РД в полость под лобовой экран не происходит, так как угол наклона весьма мал, что дает возможность применять известные гибкие кольцевые уплотнения (фиг. 5), используемые, например, при герметизации днища тяжелого носителя Н1 ([4] с. 186, рис. 5 и 10).
На фиг. 5 показаны варианты положения донного экрана:
а) когда РД не работает;
б) щель частично перекрыта (экран в работе);
в) номинальное (среднее) положение щели;
г) щель открыта при работе РД и экрана.
Управление КА по крену при посадке требуется, в общем случае, когда не удается погасить горизонтальную скорость и когда центр масс КА не расположен на его оси симметрии, так как в противном случае может произойти опрокидывание КА.
При центростремительном истечении газа образуется давление, интегральная величина которого и составляет тормозное тяговое усилие равное: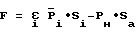
где F тяговое усилие, Н; среднее давление, действующее на элемент днища КА, Па;
среднее давление, действующее на элемент днища КА, Па;
Si площадь элемента днища, м2;
Pн наружное давление, Па;
Sа суммарная площадь днища, м2.
Ниже приводится конкретный пример реализации заявленного способа и расчет донного давления.
Так при суммарной площади днища 13 м2, посадочной массе 15000 кг, при наружном давлении 10 Па донная тяга составляет 25000 Н. Следовательно, при начальной скорости 130 м/с КА сможет затормозиться примерно за 10 с.
На фиг. 1 показано предлагаемое устройство посадки КА 1 с посадочным РД 2 и торовой камерой сгорания (цельной или составной), сопло которой выполнено в виде кольцевой цилиндрической цели (количество сопел может быть n 1, 2, 3 и т.д. в пределе образующие кольцевую щель), лобовой щит в виде подвижного экрана (днища) 3, с механизмом изменения положения лобового экрана 4, для управления по каналам тангажа и рыскания, выполненное в виде гидравлических устройств, с механизмами управления по крену, выполненными, например, в виде интерцепторов 5 или в виде вдува газа, впрыска жидкости в истекающую струю и др. (блок СУ 6).
Подвижный лобовой аэродинамический экран может быть выполнен в виде поверхности, повторяющей форму днища (например, круг, квадрат, эллипсоид и др. ).
В качестве исполнительных органов управления тягой РД для управления по тангажу, рысканию и крену (регулятор тяги, блок СУ, электрогидроклапаны, пневмоклапаны, электроприводы и др. арматура) используются механизмы и агрегаты, применяемые в современных конструкциях КА.
Создание РД с кольцевым центростремительным соплом без привязки к какому-либо типу КА и материалы опубликованы в научно-технической литературе [3 и 4]
В отличии от прототипа (фиг. 2) предлагаемое изобретение имеет преимущества, а именно, сопла посадочного РД, выполненные в виде кольцевой цилиндрической щели, размещаемой по периферии лобового экрана, образуют при работе РД центростремительный поток, который отбрасывает (вымывает) фрагменты грунта из-под днища КА, тем самым исключает опрокидывание КА при посадке, сохраняет его целостность, снижает вероятность воздействия дополнительного напряжения на донную поверхность КА, что в итоге увеличивает ресурс работы при его многоразовом использовании.
Управление величиной тяги РД осуществляется изменением расхода газа через кольцевую щель. При подходе к поверхности грунта между днищем КА и грунтом образуется "подушка" (фиг. 3), которая по мере приближения КА к грунту сжимается постоянно заполняющимся потоком газа внутри замкнутого объема и, следовательно, ведет к увеличению тягового усилия на днище экрана (при h, стремящейся к нулю).
Как только скорость вертикального снижения достигает расчетной величины, либо при возникновении ударной перегрузки РД выключается и дальнейшее торможение КА происходит за счет импульса последствия остаточной тяги РД.
Функционирование устройства посадки КА осуществляется следующим образом: при посадке КА РД 2 во время работы регулируется по тяге, подвижное днище лобового экрана 3 отклоняется с помощью гидравлических механизмов 4 по каналам тангажа, рыскания, а с помощью интерцепторов 5 по каналу крена относительно центра масс КА.
Команды на органы регулирования тяги РД, механизмы управления по осям стабилизации выдаются от блока СУ 6 КА.
Использование предложенного изобретения по сравнению с прототипом существенно улучшает массовые, энергетические и эксплуатационные характеристики, кратность использования, надежность и долговечность, что в итоге даст выигрыш в массе спускаемого (возвращаемого) груза.

Использование: в ракетно-космической технике, применительно к космическим аппаратам (КА) многоразового использования. Сущность изобретения: КА содержит посадочную двигательную установку (ДУ), связанную с корпусом КА в районе его донной части, подвижный лобовой аэродинамический экран (АЭ) и средства стабилизации КА, причем посадочная ДУ выполнена с соплами, имеющими общее критическое сечение, обеспечивающее истечение газа от периферии к центру донной части КА, лобовой АЭ снабжен приводами перемещения вдоль продольной оси КА из положения защиты донной части и ДУ аппарата при спуске в атмосфере - в положение, в котором АЭ образует общее критическое сечение сопел; при этом, средства стабилизации выполнены в виде механизмов поворота АЭ по осям тангажа и рыскания, а на внешней его поверхности установлены поворотные интерцепторы. При посадке создают силу торможения в виде донной тяги, образованной центростремительным истечением газа из критического сечения сопел, управляют донной тягой по тангажу и рысканию путем изменения формы критического сечения за счет изменения положения подвижного АЭ, а по крену - путем закрутки реактивного потока интерцепторами. 2 с.п. ф-лы, 5 ил., 1 табл.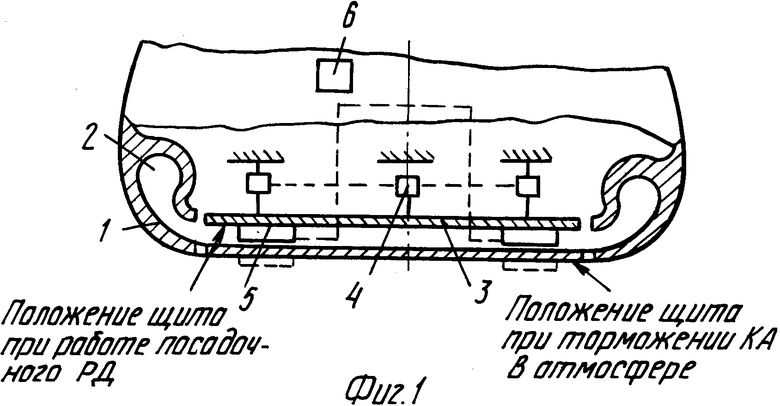
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Космонавтика | |||
| Энциклопедия | |||
| - М., СЭ, 1985, с | |||
| Гудок | 1921 |
|
SU255A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| КЛАВИШНЫЙ АППАРАТ ДЛЯ РАЗВИТИЯ ТЕХНИКИ ПАЛЬЦЕВ ПРИ ИГРЕ НА СТРУННЫХ ИНСТРУМЕНТАХ | 1922 |
|
SU615A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| НТО "Результаты экспериментального исследования тяговых характеристик центростремительного потока", 1985, НПО "Энергия". | |||
