Изобретение относится к ракетно-космической технике и преимущественно может быть использовано в ракетных двигателях малой тяги.
Регулирование тяги ракетного двигателя необходимо для поддержания требуемого значения тяги при изменении условий работы двигательной установки и для изменения тяги с целью обеспечения заданного режима полета ракеты или космического аппарата. Существующие способы регулирования тяги ракетных двигателей в широком диапазоне (глубокое дросселирование) приводят к существенному снижению экономичности и увеличению массогабаритных характеристик двигательных установок. В связи с этим проблема эффективного регулирования тяги ракетных двигателей является одной из важных проблем, возникающих при создании и использовании ракетно-космической техники.
Известен способ регулирования тяги ракетного двигателя (см. Добровольский М.В. Жидкостные ракетные двигатели. Основы проектирования. - М.: Машиностроение, 1968. С. 252), заключающийся в отключении одной или нескольких камер многокамерного двигателя.
Недостатками данного способа являются большая дискретность изменения тяги и большая масса многокамерного двигателя.
Известны способы регулирования тяги ракетного двигателя (см. Добровольский М.В. Жидкостные ракетные двигатели: Основы проектирования. - М.: Машиностроение, 1968. С. 252-254), заключающиеся в изменении расхода рабочего тела через камеру двигателя посредством изменения числа оборотов турбонасосного агрегата, дросселирования расхода рабочего тела в камеру, отключения части форсунок, закольцовки части расхода рабочего тела, уменьшения давления в баках с рабочим телом.
Недостатком данных способов является существенное снижение экономичности двигателя при отклонении расхода рабочего тела от номинального значения. Это обусловлено тем, что изменение расхода рабочего тела приводит к изменению давления в камере и, как следствие, к нерасчетному режиму работы сопла. Работа сопла в нерасчетном режиме сопряжена с потерей удельного импульса двигателя (см. Кулагин И.И. и др. Теория жидкостных реактивных двигателей. МО СССР, 1972. С. 160-166; Феодосьев В.И., Синярев Г.Б. Введение в ракетную технику. М.: Оборонгиз, 1961. С. 269-271). Наряду с этим, снижение расхода рабочего тела жидкостных ракетных двигателей сопряжено со снижением перепада давления на форсунках. В результате ухудшается смесеобразование компонентов топлива в камере, что также приводит к снижению экономичности двигателя.
Кроме того, данные способы не могут быть использованы в жидкостных ракетных двигателях малой тяги, так как для таких двигателей значительное снижение давления в камере от номинального приводит к неустойчивости процесса горения.
Наиболее близким к заявляемому изобретению следует считать способ регулирования тяги ракетного двигателя (см. Беляев Н.М., Белик Н.П., Уваров Е.И. Реактивные системы управления космических летательных аппаратов. - М.: Машиностроение, 1979. С. 17, 34-41), предусматривающий периодическое включение и выключение двигателя (импульсный режим работы двигателя). При импульсном режиме работы двигателя его эффективная тяга (постоянная во времени тяга, эквивалентная импульсному режиму) определяется соотношением
Рэф=кЗРНОМ, (1)
(приложение 2 к решению о выдаче патента, з. 2002113479/06),
где РНОМ - номинальное значение тяги двигателя;
кЗ - коэффициент заполнения импульсного режима, представляющий собой отношение времени работы двигателя при одном включении к времени между последовательными включениями двигателя.
Измерение эффективного значения тяги обеспечивают путем изменения коэффициента заполнения импульсного режима.
Данный способ позволяет регулировать тягу двигателя в широком диапазоне. При этом он может быть использован как в двигателях большой тяги, так и в двигателях малой тяги.
Существенным недостатком данного способа является его низкая экономичность. Это обусловлено тем, что запуск и выключение двигателя сопряжены с неэффективным использованием рабочего тела. Во-первых, запуск и выключение двигателя протекают при пониженных давлениях в камере. Вследствие этого камера работает в режиме перерасширения, что сопряжено со снижением удельного импульса. Во-вторых, процесс запуска и выключения жидкостного ракетного двигателя связан с ухудшением распыла, испарения и смешения компонентов топлива. В-третьих, при запуске и выключении двигателя соотношение компонентов топлива существенно отличается от оптимального значения, что приводит к неполноте сгорания топлива. Поскольку при использовании данного способа процессы запуска и выключения двигателя составляют значительную часть времени его работы, снижение экономичности двигателя является весьма существенным.
Целью настоящего изобретения является устранение отмеченного недостатка прототипа, т.е. повышение экономичности ракетного двигателя.
Указанная цель достигается следующим образом. В способе регулирования тяги ракетного двигателя, основанном на импульсном изменении тяги в процессе работы двигателя, обеспечивают непрерывную подачу рабочего тела в камеру. К рабочему телу в камере двигателя подводят энергию от внешнего источника посредством дугового разряда периодическими импульсами. При этом продолжительность импульсов определяют в зависимости от требуемой величины эффективной тяги двигателя.
Зависимость тяги двигателя Р от времени t при использовании предлагаемого способа представлена на фиг.1. Эффективную тягу двигателя Рэф для данного случая можно определить следующим образом:
где PMIN - тяга двигателя при отсутствии подвода энергии от внешнего источника;
PMAX - тяга двигателя при непрерывном подводе энергии от внешнего источника;
Т - периодичность следования импульсов;
tИ - продолжительность импульсов.
Из представленного выражения видно, что при изменении продолжительности импульсов подвода энергии от внешнего источника tИ в пределах от 0 до Г эффективная тяга двигателя изменяется, соответственно, в пределах от РMIN до PMAX.
Из выражения (2) получаем формулу для определения продолжительности импульсов подвода энергии от внешнего источника в зависимости от требуемой величины эффективной тяги двигателя:
Предлагаемый способ обеспечивает возможность регулирования тяги ракетного двигателя в широком диапазоне. При этом, в отличие от прототипа, регулирование тяги не требует многократного запуска и выключения двигателя, так как регулирование тяги осуществляется при непрерывной подаче рабочего тела в камеру двигателя. В результате устраняются потери удельного импульса, связанные с работой сопла в режиме перерасширения, ухудшением смесеобразования компонентов топлива и отклонением соотношения компонентов от оптимального значения. Кроме того, подвод энергии к рабочему телу от внешнего источника посредством дугового разряда повышает температуру рабочего тела на входе в реактивное сопло, что приводит к увеличению скорости истечения рабочего тела из реактивного сопла. Благодаря этому существенно повышается экономичность ракетного двигателя.
Таким образом, достигается цель предлагаемого изобретения.
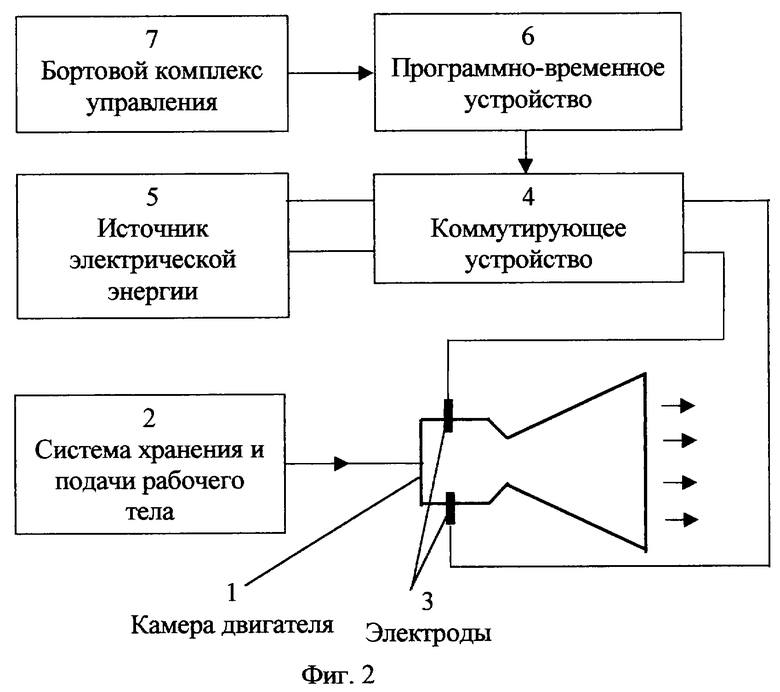
Схема устройства, реализующего предлагаемый способ регулирования тяги ракетного двигателя, представлена на фиг.2.
Устройство включает в себя камеру двигателя 1, которая связана с системой хранения и подачи рабочего тела 2. Камера двигателя 1 снабжена электродами 3, связанными через коммутирующее устройство 4 с источником электрической энергии 5, в качестве которого может быть использована, например, солнечная батарея. Коммутирующее устройство 4 через программно-временное устройство 6 связано с бортовым комплексом управления 7 летательного аппарата.
Регулирование тяги двигателя осуществляется следующим образом. В процессе работы двигателя система хранения и подачи рабочего тела 2 обеспечивает непрерывную подачу рабочего тела в камеру двигателя 1. В камере двигателя 1 к рабочему телу подводится энергия от источника электрической энергии 5 посредством дугового разряда между электродами 3 периодическими импульсами. Импульсный подвод энергии обеспечивается за счет периодического включения и выключения коммутирующего устройства 4 по команде от программно-временного устройства 6. Настройка программно-временного устройства 6 осуществляется бортовым комплексом управления 7.
При отклонении эффективной тяги двигателя от требуемого значения бортовой комплекс управления 7 обеспечивает определение нового значения продолжительности импульсов подвода энергии от источника электрической энергии 5 по формуле (3) и обеспечивает соответствующую настройку программно-временного устройства 6. В результате коммутирующее устройство 4, управляемое программно-временным устройством 6, изменяет продолжительности импульсов подвода энергии от источника электрической энергии 5, что обеспечивает приведение эффективной тяги двигателя к требуемому значению.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ МАЛОЙ ТЯГИ | 2001 |
|
RU2209334C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ МАЛОЙ ТЯГИ | 1999 |
|
RU2176748C2 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ МАЛОЙ ТЯГИ | 2001 |
|
RU2204047C2 |
| АНАЭРОБНАЯ ЭНЕРГЕТИЧЕСКАЯ СИСТЕМА С ДВИГАТЕЛЕМ СТИРЛИНГА | 2000 |
|
RU2171957C1 |
| СПОСОБ ОПТИМИЗАЦИИ РАБОТЫ СИСТЕМЫ УПРАВЛЕНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1999 |
|
RU2157463C1 |
| АНАЭРОБНАЯ ЭНЕРГОУСТАНОВКА С ДВИГАТЕЛЕМ СТИРЛИНГА И ВОДОРОДОСОДЕРЖАЩИМ ТОПЛИВОМ | 2000 |
|
RU2169319C1 |
| АВТОНОМНАЯ КОГЕНЕРАЦИОННАЯ ЭНЕРГОУСТАНОВКА | 1999 |
|
RU2162534C1 |
| АНАЭРОБНАЯ ЭНЕРГЕТИЧЕСКАЯ СИСТЕМА С ДВИГАТЕЛЕМ СТИРЛИНГА | 2000 |
|
RU2169320C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА С АЗОТНЫМ ОХЛАЖДЕНИЕМ | 1999 |
|
RU2151972C1 |
| АВТОНОМНАЯ ПАРОГЕНЕРАТОРНАЯ КОГЕНЕРАЦИОННАЯ ЭНЕРГОУСТАНОВКА | 1999 |
|
RU2162535C1 |
Способ относится к ракетно-космической технике и преимущественно может быть использован в ракетных двигателях малой тяги. Способ основан на импульсном изменении тяги. В процессе работы двигателя обеспечивают непрерывную подачу рабочего тела в камеру. К рабочему телу в камере двигателя подводят энергию от внешнего источника посредством дугового разряда периодическими импульсами. При этом продолжительность импульсов определяют по формуле
где Рэф - требуемая величина эффективной тяги двигателя;
PMIN - тяга двигателя при отсутствии подвода энергии от внешнего источника;
РМАХ - тяга двигателя при непрерывном подводе энергии от внешнего источника;
Т - периодичность следования импульсов. Способ позволяет существенно повысить экономичность ракетного двигателя. 2 ил.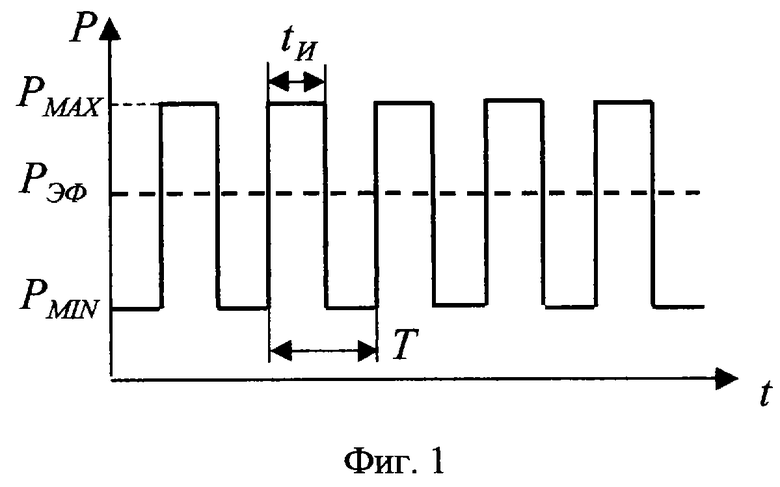
Способ регулирования тяги ракетного двигателя, основанный на импульсном изменении тяги, отличающийся тем, что обеспечивает непрерывную подачу рабочего тела в камеру двигателя, а к рабочему телу в камере подводят энергию от внешнего источника посредством дугового разряда периодическими импульсами, продолжительность которых определяют по формуле
где Рэф - требуемая величина эффективной тяги двигателя;
PMIN - тяга двигателя при отсутствии подвода энергии от внешнего источника;
РМАХ - тяга двигателя при непрерывном подводе энергии от внешнего источника;
Т - периодичность следования импульсов.
| БЕЛЯЕВ Н.М | |||
| и др | |||
| Реактивные системы управления летательных аппаратов | |||
| - М.: Машиностроение, 1979, с.17, 34-41 | |||
| ДОБРОВОЛЬСКИЙ М.В | |||
| Жидкостные ракетные двигатели: Основы проектирования | |||
| - М.: Машиностроение, 1968, с.252-254 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ МЕТОДОМ ВДУВА РАБОЧЕГО ТЕЛА В СВЕРХЗВУКОВУЮ ЧАСТЬ СОПЛА | 1992 |
|
RU2046202C1 |
| СПОСОБ ВЫСОТНОГО РЕГУЛИРОВАНИЯ ТЯГИ РЕАКТИВНОГО ДВИГАТЕЛЯ | 1993 |
|
RU2076938C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ В КОЛЬЦЕВОМ СВЕРХЗВУКОВОМ СОПЛЕ И КОЛЬЦЕВОЕ СВЕРХЗВУКОВОЕ СОПЛО | 1992 |
|
RU2111374C1 |
| DE 4202590 С1, 19.05.1993 | |||
| МНОГОСТУПЕНЧАТАЯ СИСТЕМА ОХЛАЖДЕНИЯ ЭЛЕКТРОННЫХ КОМПОНЕНТОВ ВОЗДУШНОГО СУДНА | 2007 |
|
RU2457983C2 |
| DE 2922576 А1, 18.02.1982. | |||

