Настоящее изобретение относится в целом к определению местонахождения устройств радиосвязи, особенно, когда устройство радиосвязи размещено в труднодоступной области. Более конкретно, настоящее изобретение представляет способ, устройство и систему, которая включает СГП (систему глобального позиционирования) в системе радиосвязи.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Разработка и совершенствование услуг радиосвязи и устройств продолжают развиваться чрезвычайно быстрыми темпами. Одна из проблем, связанных с устройствами радиосвязи, относится к определению физического местонахождения устройства. Может иметь место ситуация, когда необходимо определить местоположение устройства радиосвязи для ряда целей, например, когда существует причина предполагать, что абонент, связанный с устройством, находится в аварийной ситуации, или когда устройство доверено недостойному человеку. Решение этой проблемы должно быть тщательно рассмотрено с учетом ограничений по стоимости, размеру и потребляемой мощности систем радиосвязи и устройств. Проблема дополнительно существует, когда устройство радиосвязи размещено в труднодоступной области, например внутри здания.
Одно из предложенных решений для определения местонахождения устройства радиосвязи состоит в том, чтобы использовать устройство радиосвязи в качестве ретранслятора, устройства, передающего обратно сигнал определения местонахождения множеству базовых станций. Задержка в переданном обратно сигнале используется для определения расстояния между устройством радиосвязи и каждой из рядов базовых станций. Расположение устройства может затем быть определено исходя из местонахождений базовых станций и определенных расстояний. Однако трудно измерить задержку отраженного обратно сигнала с достаточной точностью, особенно, когда устройство радиосвязи размещено в труднодоступной области.
Второе предложенное решение основано на хорошо известной спутниковой системе глобального позиционирования (СГП, GPS), имеющей встроенный приемник СГП в устройстве радиосвязи. В системе СГП устройство, расположение которого должно быть проведено (в данном случае - устройство радиосвязи, но чаще - судно, самолет, грузовик и т.д.), оборудовано приемником СГП. Приемник СГП может определять его местонахождение на поверхности земли с точностью приблизительно 46 м на основании сигналов, переданных на приемник СГП спутником. Во время работы приемник СГП принимает кодированный во времени сигнал определения местонахождения от первого спутника СГП. Приемник определяет, сколько времени требуется сигналу определения местонахождения, чтобы достичь земли, сравнивая время передачи (от спутника) с временем его прихода (в приемник). На основании этой разности времени и принимая скорость передачи, например, приблизительно 299338 км/с, приемник вычисляет расстояние до первого спутника (например, приблизительно 20921,5 км). На основании предварительно запрограммированной информации относительно орбиты спутника приемник может определять, где находился в пространстве спутник во время посылки сигнала, и приемник может использовать эту информацию для определения своего местонахождения где-нибудь на поверхности сферы, имеющей радиус от спутника, равный определенному расстоянию (в этом примере - 20921,5 км). Приемник повторяет этот процесс, используя сигналы определения местонахождения от дополнительных спутников СГП, и, наконец, определяет на основании точек пересечения получившихся сфер, где он расположен.
К сожалению, типовой приемник СГП больше, чем типовое устройство радиосвязи. Даже если приемник СГП уменьшен в размере, встраивание приемника СГП в устройство радиосвязи может значительно влиять на размер устройства. Далее, известные приемники СГП обычно не имеют достаточных возможностей эффективности при определении местонахождения в труднодоступной области, например внутри здания.
Любое решение проблемы определения местонахождения устройства радиосвязи, которое включает в себя значительное количество операций по обработке сигнала в устройстве радиосвязи, будет сильно влиять на стоимость устройства, потребляемую мощность и/или эффективность.
Поэтому необходимо иметь возможность точно определить местонахождение устройства радиосвязи, особенно, когда устройство размещено в труднодоступной области, например внутри здания, способом, который не оказывает значительного влияния на стоимость, размер, эффективность или потребляемую мощность устройства радиосвязи.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение преодолевает описанные выше проблемы и предоставляет другие преимущества, предлагая систему радиосвязи, устройство и способ для определения местонахождения устройства радиосвязи, которые не оказывают значительного влияния непосредственно на устройство. Согласно наилучшим вариантам осуществления устройство радиосвязи, которое может связываться с базовой станцией по каналу связи, снабжается схемой определения местонахождения для приема сигнала определения местонахождения (например, сигнал СГП), преобразуя принятый сигнал первой частоты в сигнал второй частоты и передавая сигнал определения местонахождения с преобразованной частотой по каналу связи на приемник определения местонахождения. Приемник определения местонахождения является предпочтительно приемником СГП, связанным с базовой станцией.
Согласно наилучшим вариантам осуществления способа настоящего изобретения сигнал определения местонахождения (например, СГП) передают с первой частотой из системы определения местонахождения на устройство радиосвязи. Сигнал определения местонахождения затем преобразуют из сигнала первой частоты в сигнал второй частоты с помощью устройства радиосвязи и сигнал определения местонахождения с преобразованной частотой передают со второй частотой на один или большее количество приемников определения местонахождения, настроенных на вторую частоту.
Чтобы обеспечить возможность лучшего определения местонахождения устройства радиосвязи, которое нужно осуществить для случая, когда устройство находится в труднодоступной области, и гарантировать правильный прием сигнала определения местонахождения, передача сигнала определения местонахождения с преобразованной частотой может происходить с уровнем мощности, большим, чем уровень мощности сигналов связи, которыми обычно обмениваются между устройством радиосвязи и станцией управления. Альтернативно или в дополнение к этой особенности станция управления, связанная с приемником определения местонахождения, может временно приостановить обмен с другими устройствами радиосвязи на второй частоте в ответ на прием сигнала с преобразованной частотой или сигнала-предшественника, переданного устройством радиосвязи до передачи сигнала с преобразованной частотой.
Настоящее изобретение дает возможность определить местонахождение устройства радиосвязи без значительного влияния на размер, стоимость, эффективность или потребляемую мощность устройства радиосвязи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение более полно может быть понято из нижеследующего подробного описания предпочтительных вариантов осуществления совместно с сопровождающими чертежами, на которых:
фиг.1 является блок-схемой системы радиосвязи в соответствии с вариантом осуществления настоящего изобретения;
фиг. 2 является блок-схемой передатчика устройства радиосвязи в соответствии с вариантом осуществления настоящего изобретения; и
фиг. 3 является последовательностью операций, описывающей этапы определения местонахождения устройства радиосвязи в соответствии с вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фиг. 1 изображает наилучшую систему радиосвязи согласно настоящему изобретению. Система включает в себя множество мобильных терминалов связи, таких как мобильный терминал 10, и множество базовых станций, таких как базовая станция 12. Мобильный терминал 10 обменивается сигналами связи с базовой станцией 12 известным способом. С целью объяснения изобретение будет описано с предположением, что мобильный терминал 10 и базовая станция 12 обмениваются сигналами согласно принципам множественного доступа с кодовым разделением каналов (CDMA, МДКРК). Сигналы МДКРК имеют ширину полосы пропускания приблизительно 1,2 МГц, а сигналы СГП имеют ширину полосы пропускания приблизительно 1 МГц. Однако следует заметить, что изобретение не ограничено системами МДКРК и принципы изобретения могут быть легко адаптированы к другим типам систем связи.
Система, изображенная на фиг.1, функционирует вместе с системой определения местонахождения, которая в этом примере является системой СГП. Система СГП включает в себя спутники СГП 14 и один или большее количество приемников СГП 16. Каждый приемник СГП 16 предпочтительно связан с базовой станцией 12 или непосредственно, или через необязательное средство соединения 18. Каждый приемник СГП предпочтительно включает в себя, по меньшей мере, два полностью укомплектованных приемника СГП, один из которых принимает сигналы от мобильного терминала 10 через базовую станцию 12, а другой принимает сигналы СГП непосредственно от спутников 14. Можно использовать только один приемник СГП и обеспечить мультиплексирование его между двумя функциями. Однако такая конфигурация требует, чтобы процессор данных вносил коррекцию для временных смещений между измерениями.
Во время работы, когда необходимо определить местонахождение мобильного терминала 10, например, когда связанный с мобильным терминалом 10 абонент послал речевое сообщение или данные, указывающие, что абонент находится в аварийной ситуации, один или более спутников СГП 14 передают сигнал определения местонахождения СГП на частоте 1575,42 МГц. Этот сигнал принимают в мобильном терминале 10, который преобразует частоту СГП сигнала от его первоначальной частоты во вторую частоту, подходящую для передачи по стандартному МДКРК каналу, и передает сигнал СГП с преобразованной частотой к базовой станции 12. Схема преобразования частоты мобильного терминала описана более подробно ниже со ссылкой на фиг.2. Базовая станция 12 передает сигнал СГП с преобразованной частотой на связанный приемник СГП 16 или непосредственно, или через необязательное средство соединения 18. Средство соединения 18 преобразует сигнал СГП с преобразованной частотой из сигнала с частотой канала МДКРК в сигнал первоначальной частоты и может быть просто инверсным вариантом схемы преобразования частоты мобильного терминала 10. Если никакого средства соединения 18 не используется, приемник СГП 16 может быть настроен для приема сигналов непосредственно по МДКРК каналу. Приемник СГП 16 использует сигнал СГП, принятый через базовую станцию 12, предпочтительно вместе с сигналами СГП, принятыми от других спутников СГП, чтобы определить местонахождение мобильного терминала.
Следует заметить, что, если приемник 16 включает в себя два отдельных приемника СГП, то могут быть выполнены две дополнительные задачи. Во-первых, один из двух приемников, работающий в обычном режиме с нормальными уровнями сигнала СГП, может выполнять все функции, необходимые для правильного определения местонахождения, то есть демодулировать сигналы СГП для получения информации о синхронизации и расположении. Это позволяет второму приемнику, на который подают сигнал от удаленного устройства 10, иметь относительно продолжительные времена интегрирования. Продолжительное время интегрирования может препятствовать второму приемнику выполнить демодуляцию данных, но дать возможность второму приемнику выполнить синхронизацию кода в условиях с очень слабым сигналом (при наличии помех), в то же время имея доступ к остальной части информации, необходимой для определения местонахождения. Во-вторых, эта конструкция позволяет системе реализовать дифференциальную СГП, способ удаления разностных ошибок. Согласно дифференциальной СГП предсказанное с помощью СГП местонахождение, сформированное первым приемником, сравнивают с его предварительно и точно изученным местонахождением, чтобы определить коэффициенты коррекции. Определенные коэффициенты коррекции затем применяют к определяющим местонахождение данным, сформированным вторым приемником, чтобы определить местонахождение устройства радиосвязи.
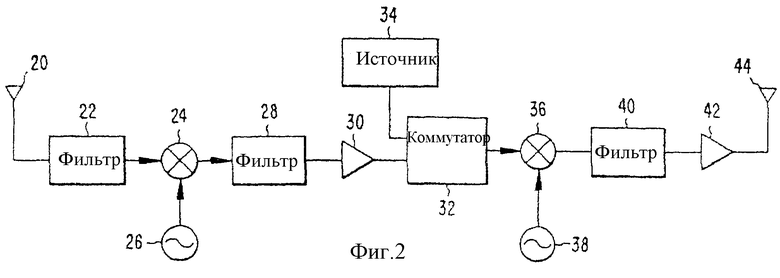
Фиг. 2 является блок-схемой части передатчика наилучшего устройства радиосвязи согласно настоящему изобретению. Часть передатчика включает в себя канал схемы определения местонахождения и канал схемы передатчика. Канал схемы определения местонахождения включает в себя антенну 20, фильтр 22, соединенный с антенной 20 для фильтрации определяющих местонахождение сигналов, принятых антенной 20, и смеситель 24, подсоединенный так, чтобы принимать отфильтрованный выходной сигнал фильтра 22 и сигнал генератора, выдаваемый генератором 26, и выдавать выходной сигнал промежуточной частоты (которая равна приблизительно той же частоте, что и выходной сигнал источника 34, описанный ниже). Передатчик дополнительно включает в себя второй фильтр 28, подсоединенный к выходу смесителя 24 для фильтрации сигнала промежуточной частоты. Усилитель 30 соединен с фильтром 28 и усиливает сигнал с отфильтрованной промежуточной частотой. Сигнал с отфильтрованной промежуточной частотой выдается в качестве одного входного сигнала на коммутатор 32.
Канал схемы передатчика включает в себя источник 34 для подачи модулированного промежуточного сигнала связи, который передает речевые сообщения, данные или информацию управления, которые должны быть переданы от устройства радиосвязи к базовой станции. Модулированный промежуточный сигнал связи имеет, по существу, ту же частоту, что сигнал промежуточной частоты, выданный смесителем 24. Источник 34 подает промежуточный сигнал связи в качестве второго входного сигнала на коммутатор 32. Состояние коммутатора 32, который может управляться или абонентом (например, посредством работы коммутатора или вводом команды в устройство радиосвязи), или системой (например, сигналом управления, посланным устройству радиосвязи базовой станцией 12), определяет, передаст ли передатчик сигнал, сформированный каналом определения местонахождения или каналом схемы передатчика. Выходной сигнал коммутатора 32 выдается в качестве первого входного сигнала на второй смеситель 36, который смешивает выходной сигнал коммутатора 32 с сигналом второго генератора 38. Смеситель 36 выдает требуемый сигнал передачи, который в этом примере является сигналом связи МДКРК с частотой канала связи МДКРК. Сигнал передачи затем фильтруют фильтром 40, усиливают усилителем 42 и передают к станции управления через антенну передатчика 44. Следует заметить, что канал схемы передатчика (фиг. 2) по существу идентичен каналу передатчика обычного устройства радиосвязи.
Во время работы передатчик в начальном состоянии передает сигналы связи (то есть речевые сообщения, данные или сигналы управления) к одному или большему количеству базовых станций по каналу передатчика. В этом начальном состоянии коммутатор 32 установлен так, чтобы принимать выходной сигнал источника 34 и выдавать выходной сигнал источника 34 ко второму смесителю 36. Если устройство находится в режиме определения местонахождения, то сигнал определения местонахождения (например, сигнал СГП с частотой 1575,42 МГц) принимают антенной 20, этот сигнал определения местонахождения принимают и преобразуют его частоту элементами 22-30, и состояние коммутатора 32 изменяют из начального состояния так, чтобы коммутатор 32 выдавал сигнал определения местонахождения с промежуточной частотой на второй смеситель 36. В этом режиме определения местонахождения второй смеситель 36 преобразует частоту обработанного сигнала определения местонахождения от промежуточной частоты (частота сигнала промежуточной частоты, выданного смесителем 26, имеющего ширину полосы пропускания приблизительно 1 МГц) во вторую частоту, подходящую для передачи по каналу связи (например, канал связи МДКРК, имеющий ширину полосы пропускания приблизительно 1,2 МГц). В этом режиме определения местонахождения связь, установленная между устройством радиосвязи и базовой станцией, временно прерывается.
В устройстве радиосвязи, включающем в себя схему, изображенную на фиг.2, предполагая соответствующее усиление, обеспечиваемое усилителем 30, передатчиком излучается сигнал определения местонахождения, по существу неизменный, за исключением того, что имеет отличную частоту, к одной или большему количеству базовых станций. Передатчик может сначала посылать сигнал-предшественник, чтобы указать базовой станции, что предстоит передача сигнала определения местонахождения. Базовая станция затем использует приемник определения местонахождения, такой как приемник СГП 16, чтобы определить местонахождение радиоустройства. Приемник определения местонахождения может быть настроен на частоту канала радиосвязи вместо исходной частоты сигнала определения местонахождения или может принимать сигнал определения местонахождения на его исходной частоте после того, как схема, такая как средство соединения 18 (фиг.1) обратно преобразует сигнал определения местонахождения из сигнала с частотой канала связи в сигнал исходной частоты. Следует заметить, что устройство радиосвязи, имеющее схему, изображенную на фиг.2, дает возможность включить в устройство средство определения местонахождения без необходимости выполнения обработки сигнала, детектирования или вычислений местонахождения в самом устройстве.
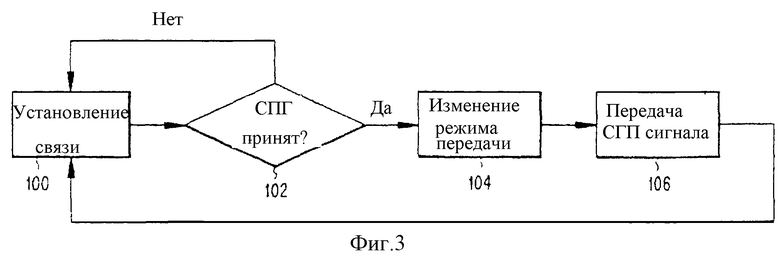
Фиг.3 изображает последовательность операций, описывающую способ определения местонахождения устройства радиосвязи, согласно настоящему изобретению. На этапе 100 связь устанавливают между устройством радиосвязи и базовой станцией. Когда эта связь установлена, сигналы связи (то есть речевые сообщения, данные или сигналы управления) передаются обычным способом между устройством и базовой станцией. На этапе 102 устройство определяет, принят ли на устройство сигнал определения местонахождения или сигнал, например, от коммутатора, или команда от базовой станции по каналу связи. Если нет, процесс возвращается к этапу 100 и поддерживается обычный канал связи. Если сигнал определения местонахождения был принят устройством радиосвязи, устройство на этапе 104 изменяет режимы и коммутатор 32 выбирает канал схемы определения местонахождения вместо стандартного канала передатчика. В результате этого изменения режима обычная связь приостанавливается. На этапе 106 сигнал определения местонахождения с преобразованной частотой передают от устройства радиосвязи к базовой станции. После того как передача сигнала определения местонахождения завершена (дающая возможность осуществить соответствующие вычисления определения местонахождения, которые нужно выполнить приемником определения местонахождения), процесс возвращается к этапу 100, на котором восстанавливают обычную связь.
Как очевидно из предшествующего описания, настоящее изобретение предоставляет способ, систему и устройство для определения местонахождения устройства в системе радиосвязи. Изобретение особенно выгодно тем, что само устройство не требуется для выполнения значительных функций обработки сигнала.
В то время как предшествующее описание содержит много подробностей и специфических особенностей, должно быть понято, что эти подробности и специфические особенности не являются ограничениями изобретения, а включены просто с целью иллюстрации. Для специалистов многие модификации к описанным выше примерам очевидны без отрыва от объема и формы изобретения, которые определены нижеследующей формулой изобретения и их допустимыми эквивалентами.
Заявленные устройство, способ и система дают возможность точно определить местонахождение устройства радиосвязи без необходимости выполнения устройством длительной обработки сигнала или вычислений. Радиоустройство преобразует частоту сигнала определения местонахождения от начальной частоты до частоты стандартного канала связи и передает сигнал с преобразованной частотой к базовой станции обычным способом. Приемник определения местонахождения, связанный с базовой станцией, принимает сигнал определения местонахождения и определяет местонахождение устройства радиосвязи на основании сигнала определения местонахождения. Достигаемым техническим результатом является упрощение обработки сигнала. 3 с. и 17 з.п.ф-лы, 3 ил.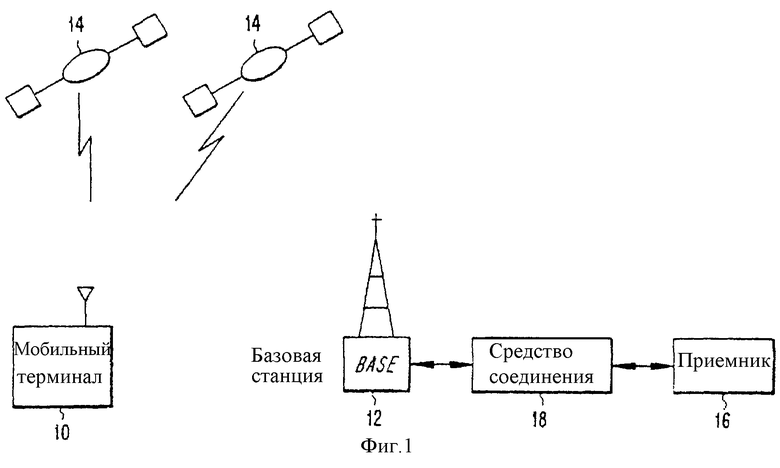
| ЕР 0 512 789 А2, 11.11.1992 | |||
| Экономайзер | 0 |
|
SU94A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |

