Изобретение относится к управлению уровнями мощности передаваемых сигналов в системах связи, особенно в системах с множественным доступом и передачей сигналов в широком спектре.
Хорошие способы управления мощностью передачи могут быть важны для систем связи, имеющих много одновременно работающих передатчиков, потому что такие способы уменьшают взаимные помехи таких передатчиков. Например, управление мощностью передачи необходимо для получения высокой пропускной способности систем связи, в которых используется множественный доступ с разделением кодов (МДРК). Это важно для передачи сигналов вверх по сети, т.е. для передачи от удаленного терминала в сеть связи, например, на базовую станцию. Такую передачу иногда называют обратными линиями связи.
Необходимость управления мощностью передачи в обратных линиях связи признается для современных МДРК сотовых систем. Управление мощностью обратных линий связи в соответствии со стандартом IS-95-А обеспечивает способ замкнутой петли, в котором базовая станция измеряет уровень сигнала, принятого от удаленной станции, и затем передает один бит управления мощностью на удаленную станцию каждые 1/25 мсек. На основе бита управления мощностью удаленная станция увеличивает или уменьшает свою мощность передачи (в обратной линии связи) на определенную величину.
Необходимость управления мощностью передачи сигналов от базовых станций, т.е. передачи из сети связи на удаленную станцию, считалась менее важной для современных сотовых систем и других МДРК систем связи.
Обычная форма управления мощностью передачи сигналов от сети на удаленную станцию обеспечивалась бы системой связи, в которой удаленный терминал измеряет свой принятый от базовой станции уровень мощности и просто передает измерение на базовую станцию, которая может подстроить в определенных обстоятельствах свою мощность передачи. Такая система связи находится среди тех, которые описаны в Международной патентной публикации WO 95/12297 Джильхузеном и др., которая также описывает систему связи, в которой уровень мощности передачи от базовых станций на удаленную станцию уменьшается на определенную величину на основе измерения частоты ошибок блоков, принятых уровней мощности от удаленной станции или принятых уровней мощности от базовых станций.
Управление мощностью передачи базовых станций в системе, соответствующей стандарту IS-95-A основано на измерениях частоты ошибок блоков (ЧОБ) удаленной станцией, которая передает ЧОБ-сообщения в систему. В разделах 6.6.4.1.1 и 7.6.4.1.1 стандарта IS-95-A отмечается, что такие ЧОБ-сообщения могут передаваться, когда превышена пороговая величина, и/или они могут передаваться периодически. (Обычно ЧОБ-сообщение передается каждые 1-5 секунды). Одна проблема этого способа заключается в том, что он может требовать много времени (несколько секунд) для накопления соответствующей ЧОБ-статистики. В результате становится невозможно отслеживать рэлеевское затухание и теневое затухание. Способ оказался настолько медленным, что он не приносит обычно какой-либо выгоды по сравнению с отказом от применения управления мощностью передачи базовых станций.
В некоторых более современных системах персональной связи (СПС) также используется МДРК, Существенные особенности СПС США определены в стандарте Американского национального института стандартов "Personal Station-Base Station Compatibility Requirements for 1.8 to 2.0 GHz Code Division Multiple Access (CDMA) Personal Communications Systems" ANSI J-STD-008 (Aug. 1995), который во многих отношениях аналогичен стандарту IS-95 на сотовые системы. Однако при работе с установкой частоты ошибок, равной 2, стандарт J-STD-008 требует, чтобы удаленная станция сообщала об ошибках блоков, передаваемых базовыми станциями, каждый раз, когда они возникают. Это ставит сеть в полную зависимость от ошибок блоков, но все же требуется много времени для накопления соответствующей статистики, что обеспечивает лишь незначительное улучшение по сравнению со способом, соответствующим стандарту IS-95-А.
В других концепциях систем связи, как ОСРК, (ОСРК - опытный стенд с разделением кодов), которая описана в отчетах "Final Report on Radio Subsystem Functionality", R2020/CSE/LC/DS/P/047/al, UMTS Code Division Testbed ((CODIT), CSELT Centro Studie Laboratori Telecomunicazioni S.p.A.ed (Aug. 1995), качество сигнала определяется посредством оценки исходной битовой частоты ошибок (БЧО) вместе ЧОБ. Следовательно, хорошая статистика может быть получена быстрее, и удаленная станция передает БЧО сообщения в сеть более часто (обычно 1-10 раз в секунду). Работа системы существенно улучшается по сравнению с работой системы, в которой используется управление мощностью базовых станций в соответствии со стандартом IS-95-А, способ ОСРК все еще слишком медленный, чтобы можно было обработать рэлеевское затухание.
Можно использовать способ управления мощностью передачи удаленной станции, описанный в стандарте IS-95-A для управления мощностью передачи базовых станций. Он описан в Европейской патентной публикации 0680160 Дохи и др. Удаленный терминал затем измеряет отношение сигнала базовых станций к помехам (отношение сигнал/шум) и передает соответствующую команду для управления мощностью в сеть удаленного терминала. В соответствии со стандартом IS-95-A каждая команда управления мощностью будет одинарным битом, который не кодируется, чтобы минимизировать накладные расходы по передаче сигналов. Тем не менее система связи, указанная в Европейской патентной публикации и 0680160, имеет некоторые существенные отличия от системы, определенной стандартом IS-95-А. Например, европейская система имеет длину блока, которая равна половине длины блока, соответствующего стандарту IS-95-А, битовую скорость порядка нескольких сот килобит в секунду, более широкую канальную полосу частот порядка 5 МГц и МДРК скорость передачи элементарных сигналов четыре миллиона сигналов в секунду.
Такая система связи довольно хорошо отслеживала бы рэлеевские затухания и может хорошо работать, когда удаленный терминал не находится в программно-автоматизированном режиме работы, т.е., когда удаленный терминал не связан одновременно с двумя или более базовыми станциями. Это иногда называется макроразнесением. Программно-автоматизированный режим работы описан в патентах США 5109528, выданный Удденфельдту, и 5327577, выданный Удденфельдту, при этом оба патента приведены здесь в ссылках. Когда удаленный терминал не находится в программно-автоматизированном режиме работы, частота ошибок некодированных команд управления мощностью обычно около одного процента, что не вызывает каких-либо больших проблем.
Тем не менее частота ошибок некодированных команд управления мощностью в сети базовых станций, как можно ожидать, значительно растет, когда удаленный терминал находится в программно-автоматизированном режиме работы. Помимо этого ошибки в командах, принятых различными базовыми станциями, задействованными в программно-автоматизированном режиме работы, будут почти независимыми одна от другой. В связи с тем, что 1600 команд управления мощностью в секунду будут передаваться на две базовые станции, задействованные в программно-автоматизированном режиме работы в соответствии с системой, описанной Дохи и др., уровни мощности передачи базовых станций, указанные в командах, как можно ожидать, будут смещаться относительно друг друга к уровням, которые могут быть субоптимальны с точки зрения пропускной способности системы. Пропускная способность системы уменьшается в связи с тем, что по меньшей мере одна из базовых станций, связанная с удаленной станцией программно-автоматизированным режимом передачи, будет передавать на уровне мощности, который слишком высок.
Одним способом решения проблем, возникающих при управлении мощностью передачи в сети базовых станций, является частая подстройка уровней мощности, передаваемых от базовых станций, задействованных в программно-автоматизированном режиме работы. Эти базовые станции передают самые последние величины их уровней мощности на контроллер радиосети (КРС), который сравнивает эти величины и передает соответствующие команды подстройки мощности ΔP1 DL(tn) и ΔP2 DL(tn) обратно на базовые станции. Это решение раскрывается в патентной заявке США 08/870867, поданной 6 июня 1996 г. и здесь указанной в ссылке.
Этот способ иллюстрируется фиг.1, в которой базовая станция BS1 передает сообщение Р1 DL(tn), указывающее уровень мощности P1(tn) во время tn при передаче сигнала на контроллер радиосети (КРС). В сотовой системе связи КРС может быть контроллер базовой станции или коммутационный центр мобильных услуг. Базовая станция BS2 также передает сообщение P2 DL(tn), указывающее свой уровень мощности передачи P2(tn) во время tn на КРС. В программно-автоматизированном режиме работы, показанном на фиг.1, удаленная станция RT принимает сигналы от базовой станции BS1 и принимает сигналы, содержащие по существу аналогичные информационные сообщения, от базовой станции BS2.
КРС передает соответствующие команды о поправках ΔP1 DL(tn) и ΔP2 DL(tn) на базовые станции, которые основаны на сообщениях P1 DL(tn), P2 DL(tn), в результате чего базовые станции подстраивают свои уровни мощности передачи для поддержания требуемого соотношения между P1(tn+1) и P2(tn+1). Уровни мощности передачи P1(tn), P2(tn) получены из более ранних команд ΔP1 DL(tn-1) и P2 DL(tn-1), как показано на фиг.1.
КРС может определять команды о поправках уровней мощности различным образом, как описано в патентной заявке США 08/870867. Поправки уровней мощности обычно делаются один раз на блок, что удерживает смещение между уровнями мощности базовых передатчиков, задействованных в программно-автоматизированном режиме передачи, на низком уровне, например, в среднем менее 1 дБ.
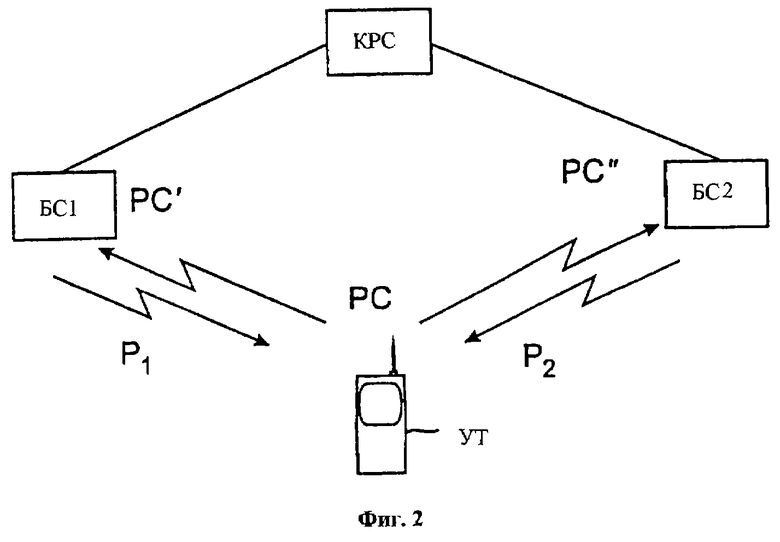
Как возникают ошибки, независимые одна от другой в командах управления мощностью удаленной станции, более подробно проиллюстрировано на фиг.2, которая показывает удаленный терминал RT. связанный с двумя базовыми станциями BS1, BS2, управляемыми КРС. В программно-автоматизированном режиме работы, показанном на фиг.2, как и на фиг.1, удаленная станция RT принимает сигналы от базовой станции BS1 с уровнем мощности P1 и принимает сигналы, содержащие по существу аналогичные информационные сообщения от базовой станции BS2 с уровнем мощности Р2. Команды управления мощностью PC, передаваемые удаленной станцией RT, принимаются базовой станцией BS1 как команды PC' и принимаются базовой станцией BS2 как команды PC". Из-за ошибок, которые могут возникнуть из многих источников, команда PC может не быть такой же, как одна из или обе команды PC', PC'', и команда PC' может не быть такой же, как команда PC''.
Величина разности между одним уровнем мощности передачи от базовой станции и уровнем мощности передачи другой базовой станции влияет на пропускную способность системы, так как передачи одной базовой станции выглядят как помехи для другой базовой станции. Помимо этого важна скорость смещения уровней мощности каждой базовой станции, так как большие скорости смещения обычно требуют более частой подачи управляющих команд. Это увеличивает нагрузку сообщений на линии связи между базовыми станциями BS1, BS2 и КРС.
В соответствии с патентной заявкой США 08/870867 эти проблемы устраняются использованием качественного управления мощностью передачи базовых станций. Согласно этому подходу удаленный терминал RT измеряет качество принятого сигнала базовых станций путем определения ЧОБ или БЧО и затем удаленный терминал RT сообщает свое измерение качества в сеть, передавая соответствующее сообщение о качестве базовым станциям, задействованным в передаче сигналов. Каждая базовая станция передает сообщение удаленного терминала о качестве (сообщение Уровня-3) на КРС, который обеспечивает соответствующие поправки мощности передачи соответствующих базовых станций.
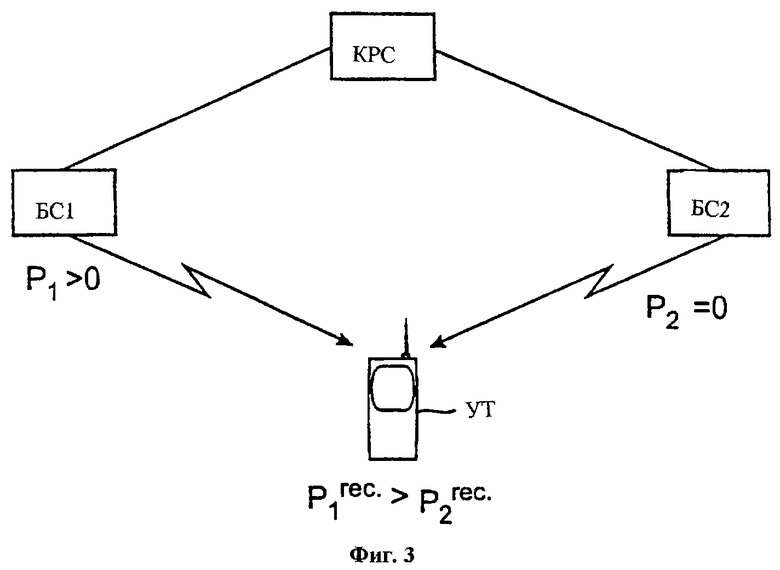
В соответствии с патентной заявкой США 08/870867 удаленная станция RT может или периодически передавать сообщения о принятом уровне сигнала от базовой станции в сеть, или может передать сообщение каждый раз, когда принимается сигнал от нового базового передатчика, уровень которого выше уровня любого другого только что принятого сигнала от этого передатчика. В такой системе связи сеть КРС будет реагировать на сообщения об уровне сигнала от удаленной станции таким образом, чтобы вела передачу та базовая станция, чей сигнал принимается с наивысшим уровнем удаленным терминалом.
Этот сценарий изображен на фиг.3, которая показывает, что, когда принятый удаленным терминалом уровень мощности P1 от базовой станции BS1 больше принятого уровня мощности Р2 от базовой станции BS2, уровень мощности Р1, передаваемый базовой станцией BS1, больше нуля, и уровень мощности Р2, передаваемый базовой станцией BS2, равен нулю. (На практике уровень мощности Р2 должен быть только значительно меньше уровня мощности Р1). Более слабая базовая станция BS2 должна работать иначе, чем в обычном программно-автоматизированном режиме. Сеть извещает удаленный терминал RT каждый раз, когда система решает изменить передающую базовую станцию для учета различий между базовыми станциями, таких как различные сигналы псевдопомех, хотя различные базовые станции обычно выглядят одинаковыми с точки зрения удаленной станции в программно-автоматизированном режиме работы.
Еще одно решение, раскрытое в патентной заявке США 08/870867, заключается в применении разомкнутой петли для управления мощностью вместо замкнутой петли для управления мощностью во время соединения с макроразнесением. Согласно этому подходу отношение сигнал/шум в сети удаленной станции измеряется для каждого блока данных в базовых станциях, задействованных в программно-автоматизированном режиме работы, и измерения ОСШ передаются в КРС. KРC обрабатывает ОСШ величины от базовых станций, задействованных в программно-автоматизированном режиме работы, и обеспечивает передачу только той базовой станции, у которой уровень мощности сигналов, принятых удаленным терминалом, является наивысшим.
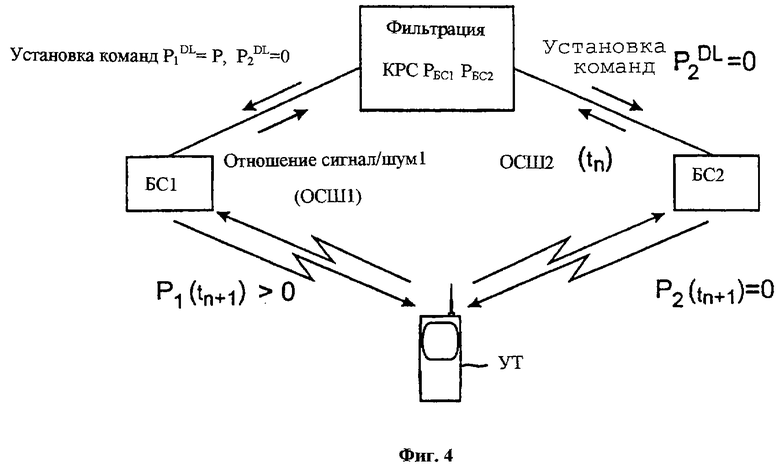
Этот сценарий изображен на фиг.4, которая показывает, что уровень мощности в сети базовых станций P1(tn+1), передаваемый базовой станцией станциями BS1 во время tn+1, больше нуля, и уровень мощности P2(tn+1), передаваемый базовой станцией BS2 во время tn+1, равен нулю. Это условие возникает в результате установки соответствующих команд SetP1 DL, SetP2 DL управления мощностью передачи, переданных КРС на базовые станции BS1, BS2 соответственно. КРС генерирует набор команд управления мощностью, основанный на соответствующих определениях базовых станций и сообщениях о ОСШ в сети удаленной станции, т.е. OCШ1(tn), ОСШ2(tn) в предшествующее время tn.
Следовательно, в случаях, когда мощность в сети удаленной станции, принятая на базовой станции, например, на базовой станции BS1, выше мощности в сети удаленной станции, принятой на другой базовой станции, например, станции BS2, КРС передает сообщения на базовую станцию BS1, которые заставляют станцию BS1 начать передачу на удаленный терминал RT, на базовую станцию BS2, что заставляет базовую станцию BS2 прекратить передачу на удаленный терминал RT и благодаря этому терминал RT слушает только базовую станцию BS1, а не базовую станцию BS2, начиная с определенного номера блока данных.
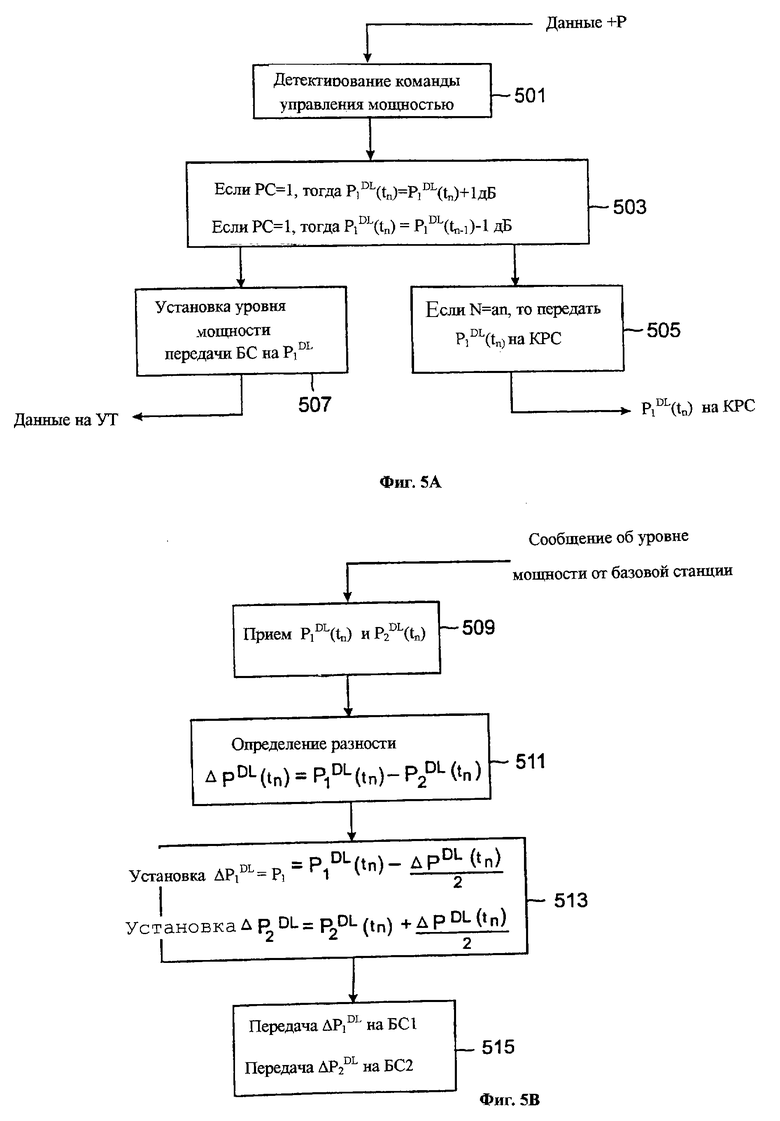
Фиг.5А, 5В и 5С также иллюстрируют работу системы связи в соответствии с патентной заявкой США 08/870867. В блоке 501 базовая станция BS1 принимает данные и передает команды о поправках мощности от мобильной станции RT. Базовая станция BS1 идентифицирует и декодирует команду о поправках, принятую в первый момент времени, который ради удобства может иметь величину или +1 или -1, и соответственно подстраивать уровень мощности передачи базовой станции в следующий момент времени. Как показано блоком 503 на фиг.5А, например, если мобильный терминал передает команду о поправках РС=1, то уровень мощности передачи базовой станции будет P1(tn+1)=+1 дБ по отношению к предшествующему уровню мощности передачи P1(tn). Аналогичным образом, если мобильный терминал передает команду о поправке РC=-1, то уровень мощности передачи базовой станции будет P1(tn+1)=-1 дБ по отношению к предшествующему уровню передачи P1(tn). В блоке 505 сообщение P1 DL(tn), указывающее уровень мощности передачи в сети базовой станции P1(tn) во время tn, передается базовой станцией BS1 на КРС. Базовая станция преимущественно передает такие сообщения не так часто, как мобильный терминал передает команды о поправках мощности, чтобы уменьшить нагрузку по передаче сигналов на базовую станцию и соединенный с ней контроллер. Например, базовая станция может подсчитывать число принятых команд о поправках n и передавать сообщение при каждой N-ной команде о поправках, где N - множитель для числа n. Множитель может быть целым числом в интервале от приблизительно 16 до приблизительно 1600 для некоторых систем связи. В блоке 507 базовая станция BS1 устанавливает свой уровень мощности передачи на величину, соответствующую команде.
Как указано блоком 509 на фиг.5В, КРС принимает сообщения P1 DL(tn) и возможно сообщения от других базовых станций, задействованных в программно-автоматизированном режиме работы, например P2 DL(tn). КРС, который может содержать специализированные схемы или программируемый процессор для этой цели, затем определяет новые соответствующие команды о поправках ΔP1 DL(tn+1) и ΔР2 DL(tn+1), которые, как показано блоком 513 на фиг.5В, могут быть основаны на разности (блок 511) между уровнями мощности передачи P1(tn), P2(tn) базовых станций BS1, BS2. В показанном примере P1 DL(tn)>P2 DL(tn) и таким образом новая команда о поправке ΔP1 DL(tn+1) соответствует предшествующему уровню мощности первой базовой станции минус половина разности между уровнями мощности, и новая команда о поправке ΔP2 DL(tn+1) соответствует предшествующему уровню мощности второй базовой станции плюс половина той же разности. Если P2 DL(tn)>Р1 DL(tn), то по существу будет проводиться та же операция, но идентичность базовых станций поменяется. Эти команды затем передаются любым удобным образом на соответствующие базовые станции, как показано блоком 515.
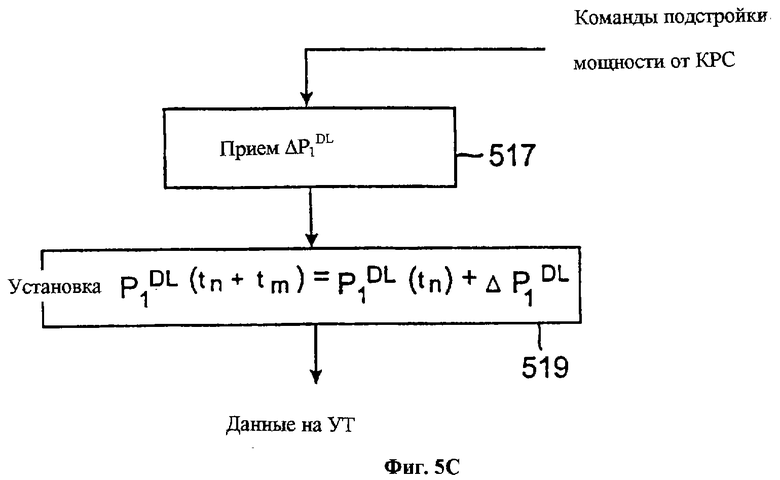
Работа системы связи такого типа также иллюстрируется фиг.5С, в которой команда о поправке ΔP1 DL от КРС принимается базовой станцией BS1, как показано блоком 517. В ответ базовая станция подстраивает свой уровень мощности передачи во время tn+tm, как показано блоком 519, где интервал tm является удобным временным интервалом, например, целое число коммуникационных блоков данных. Подобная операция проводится в другой базовой станции (станции BS2). Помимо этого, если уровень мощности более слабой базовой станции устанавливается командой на уровне нуля посредством операций, указанных блоками 511-519, то более слабая базовая станция может выгодно поддерживаться в программно-автоматизированном режиме работы во всех других отношениях, как описано выше.
Управление мощностью в сети базовых станций способом замкнутой петли, описанное выше со ссылкой на фиг.1, влечет за собой дополнительные нагрузки для передачи сигналов между базовыми станциями и КРС. Например, базовые станции должны передавать сообщение о мощности в КРС примерно каждые 10 мсек, чтобы удерживать смещение приблизительно на уровне 1-2 дБ в системе с высокой степенью некодированных или мало кодированных команд управления мощностью и со ступенчатой величиной подстройки мощности 1 дБ. В то время, как другие решения, раскрытые со ссылкой на фиг.3 и 4, приводят к довольно низкой величине нагрузки по передаче сигналов управления между КРС и базовые станциями, остается необходимость управления мощностью способом замкнутой петли в сочетании со способом передачи данных по управлению мощностью от КРС на связанные базовые станции во время передач при макроразнесении.
Краткое описание сущности изобретения
В основу настоящего изобретения положена задача обеспечения эффективного управления мощностью базовых станций по замкнутой петле, задействованных в передаче сигналов при макроразнесении на определенную мобильную станцию. Еще одной задачей, лежащей в основе настоящего изобретения, является уменьшение требований к передаче сигналов между базовыми станциями, задействованными в передаче при макроразнесении, и контроллером, подстраивающим уровни мощности базовых станций.
В соответствии с изобретением эти и другие случаи достигаются способом управления уровнями мощности сигналов, передаваемых базовыми станциями в системе связи, имеющей базовые станции и удаленные станции. Команды управления уровнем мощности передаются от удаленной станции на базовые станции, от которых удаленная станция принимает сигналы, для управления уровнями мощности сигналов, передаваемых базовыми станциями. Определяется, принимает ли удаленная станция одновременно первый сигнал, переданный первой базовой станцией, и по меньшей мере один второй сигнал, передаваемый по меньшей мере одной второй базовой станцией, которые содержат по существу аналогичные информационные сообщения. Первое сообщение об уровне мощности первого сигнала передается на контроллер от первой базовой станции. По меньшей мере одно второе сообщение об уровне мощности по меньшей мере одного второго сигнала передается на контроллер от по меньшей мере одной второй базовой станции. Первое сообщение и по меньшей мере одно второе сообщение сравниваются в контроллере. Первая команда для подстройки уровня мощности первого сигнала передается от контроллера на первую базовую станцию, и по меньшей мере одна вторая команда для подстройки уровня мощности по меньшей мере одного второго сигнала передается от контроллера по меньшей мере на одну вторую базовую станцию.
В соответствии с первым вариантом реализации изобретения команды управления уровнем мощности передаются от удаленной станции на базовые станции с уменьшенной скоростью, когда удаленная станция принимает сигналы от более чем одной базовой станции. Согласно первому аспекту одинаковые команды контроля уровня мощности передаются несколько раз от удаленной станции на базовые станции. Согласно второму аспекту больше избыточности кодируется в команды управления уровнем мощности, передаваемые от удаленной станции на базовые станции. Согласно третьему аспекту команды управления уровнем мощности, которые специализированы для одной или более базовых станций, передаются на эти базовые станции.
Согласно второму варианту реализации изобретения величина ступеньки для подстройки уровня мощности контроллером устанавливается ниже, когда удаленная станция принимает сигналы от более одной базовой станции, чем когда удаленная станция принимает сигналы только от одной базовой станции.
Краткое описание чертежей
Фиг. 1 иллюстрирует способ управления мощностью передачи базовых станций во время программно-автоматизированного режима работы.
Фиг. 2 иллюстрирует программно-автоматизированный режим работы задействованных удаленной станции и двух базовых станций.
Фиг. 3 иллюстрирует один способ преодоления проблемы команд управления мощностью от удаленной станции, принимаемых при уровне сигнала, который слишком низок, во время программно-автоматизированного режима работы.
Фиг. 4 иллюстрирует другой способ преодоления проблемы команд управления мощностью от удаленной станции, принимаемых при уровне сигнала, который слишком низок, во время программно-автоматизированного режима работы.
Фиг.5А и 5В иллюстрирует работу системы связи.
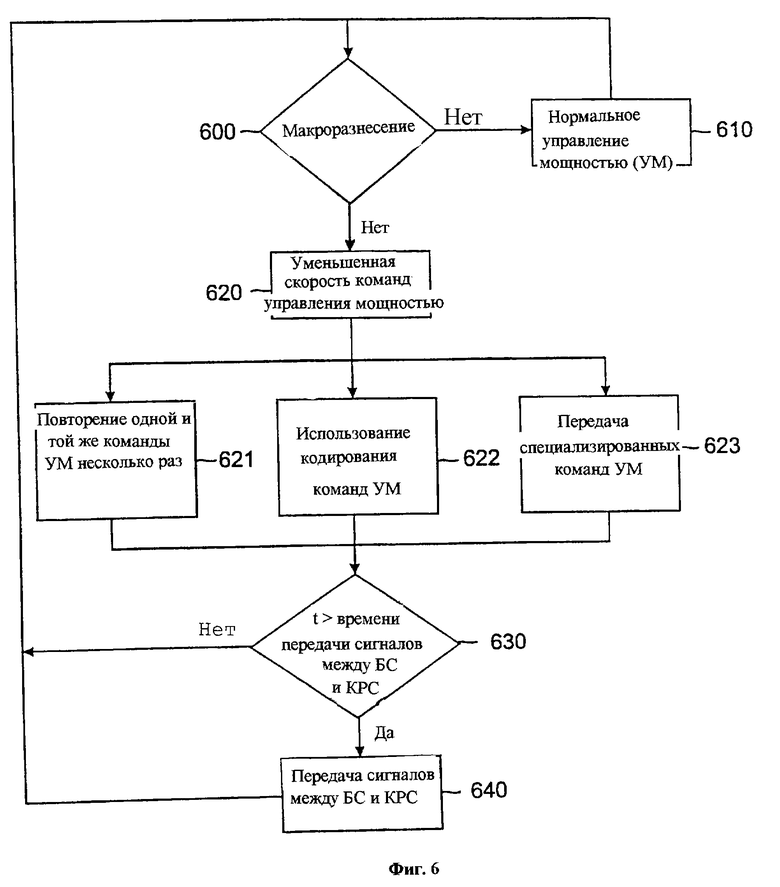
Фиг.6 показывает блок-схему способа в соответствии с примерным вариантом реализации изобретения.
Изобретение теперь будет описано более подробно со ссылкой на предпочтительные примерные варианты реализации и на приложенные чертежи.
Подробное описание изобретения
Следует учесть, что нижеприведенное описание, хотя и указывающее предпочтительные варианты реализации изобретения, дается только ради иллюстрации, так как различные изменения и модификации в пределах объема изобретения станут очевидными для специалистов в данной области техники.
Использование КРС или чего-нибудь другого в сети связи для подстройки уровней выходной мощности базовых станций, как раскрывается, например, в патентной заявке США 08/807867, является эффективным способом удерживания выходных мощностей каналов трафика на должных уровнях во время макроразнесения. Однако это приводит к дополнительной нагрузке сети по передаче сигналов между КРС и базовыми станциями. В соответствии с настоящим изобретением могут быть использованы несколько способов для уменьшения нагрузки по передаче сигналов между КРС и базовыми станциями.
Например, требуемая скорость команд по управлению мощностью, т.е. скорость команд управления мощностью, передаваемых мобильной станцией на базовые станции, которая необходима для достижения заданного ОСШ, может быть уменьшена во время программно-автоматизированного режима работы, например, в 4 раза. Идея в основе этого подхода заключается в том, что смещение уровней будет меньше, если на базовые станции передается меньше сообщений, так как меньше сообщений будут истолкованы иначе базовыми станциями. Это целесообразно, так как целью быстрого управления мощностью по способу замкнутой петли является отслеживание быстрого затухания. При программно-автоматизированном режиме работы быстрое затухание не будет таким сильным, как в нормальных условиях благодаря хорошему пространственному разнесению станций.
Другим способом снижения требований к передаче сигналов между КРС и базовыми станциями является уменьшение величины ступеньки для подстройки мощности, т. е. относительной величины, на которую подстраивается выходная мощность в ответ на команды КРС для подстройки мощности. В соответствии с примерным вариантом реализации величина ступеньки в 1 дБ может быть уменьшена до 0,25 дБ во время макроразнесения. Идея уменьшения величины ступеньки состоит в том, чтобы заставить смещение уровней происходить медленнее, так как каждый раз, когда сообщение об управлении мощностью принимается по другому, это приводит лишь к малому смещению. Это означает, что КРС не должен подстраивать уровни выходной мощности базовых станций так часто, как потребовалось бы для ступенек большей величины, если бы допускалось такое же большое смещение перед тем, как потребовались подстройки. Польза такого подхода заключается в том, что он требует малой передачи сигналов или вообще не требует передачи сигналов по эфирному интерфейсу.
Чтобы еще больше уменьшить требуемую передачу сигналов между КРС и базовыми станциями, одна и та же команда управления мощностью может быть передана от мобильной станции на базовые станции несколько раз. Следовательно, вероятность, что команда управления мощностью принята правильно, увеличивается, так как вероятность, что большинство принятых битов правильно приняты, увеличивается, когда число рассмотренных битов увеличивается. Например, менее вероятно, что четыре или больше битов в 8-битовой команде управления мощностью будут приняты неправильно, чем, когда один или больше битов в команде длиной 2 бита будут приняты неправильно.
Еще один вариант уменьшения требований к передаче сигналов между базовыми станциями и КРС заключается в использовании большего кодирования в командах управления мощностью, передаваемых от мобильной станции на базовую станцию, т.е. для увеличения кодирующей избыточности команд управления мощностью во время макроразнесения.
В обоих этих подходах дополнительные биты используются в командах управления мощностью, передаваемых от мобильной станции для повышения вероятности того, что команды управления мощностью правильно приняты базовыми станциями во время макроразнесения.
Более низкая скорость команд управления мощностью также делает возможным передавать различные команды управления мощностью на различные базовые станции. Таким образом выходные мощности различных базовых станций могут быть сделаны зависимыми от усиления посредством добавления небольшой нагрузки на передачу сигналов или вообще без дополнительной нагрузки. Этот подход имеет дополнительное преимущество, заключающееся в уменьшении нежелательного смещения уровня мощности, так как мобильная станция может противодействовать смещению мощности выбором команд управления мощностью, передаваемых на различные базовые станции таким образом, чтобы уменьшалось смещение мощности. Однако, чтобы передать соответствующие команды управления мощностью на различные базовые станции, мобильная станция должна знать уровни выходной мощности у различных базовых станций. Соответственно базовые станции передают информацию относительно их уровней выходной мощности на мобильную станцию. Мобильная станция вероятно не должна противодействовать смещению мощности, если она передает одну и ту же команду управления мощности на все базовые станции, с которыми она в текущий момент соединена.
Подходы, описанные выше, могут конечно сочетаться один с другим. Также введением дополнительной передачи сигналов могут быть поддержаны другие схемы управления выходной мощностью.
Способ уменьшения требований к передаче сигналов между базовыми станциями и КРС в соответствии с настоящим изобретением иллюстрируется блок-схемой на фиг. 6. Способ начинается на этапе 600, на котором определяется, происходит ли передача при макроразнесении. Если так, то способ продолжается с этапа 620. Или же команды управления мощностью передаются на работающую базовую станцию от мобильной станции с нормальной скоростью на этапе 610, и способ возвращается к этапу 600.
На этапе 620 команды управления мощностью передаются от мобильной станции на базовые станции, задействованные в передаче с пониженной скоростью при макроразнесении. Этап 620 может содержать один или больше этапов 621, 622 и 623, которые могут проводиться параллельно.
На этапе 621 команды управления мощностью передаются от мобильной станции на базовые станции, задействованные в передаче с пониженной скоростью при макроразнесении, при этом повторяются по меньшей мере некоторые из команд управления мощностью. Многократные последовательные и аналогичные команды управления мощностью увеличивают вероятность, что команды принимаются правильно. Это уменьшает объем передачи сигналов, требующийся между базовыми станциями и КРС.
На этапе 622 команды управления мощностью передаются от мобильной станции на базовые станции, задействованные в передаче с пониженной скоростью при макроразнесении, при кодировании большей избыточности в команды. Более высокая скорость кодирования повышает вероятность того, что команды управления мощностью принимаются правильно. Это уменьшает количество требований к передаче сигналов между базовыми станциями и КРС.
На этапе 623 команды управления мощностью передаются от мобильной станции на базовые станции, задействованные в передаче с пониженной скоростью при макроразнесении, путем передачи специализированных команд управления мощностью на каждую базовую станцию, задействованную в передаче при макроразнесении. Таким образом передача сигналов между базовыми станциями и КРС уменьшается и система делается более гибкой.
На этапе 630 определяется, превосходит ли определенный порог параметр t счетчика времени. Параметр t представляет собой время с последнего момента подстройки уровня мощности сигналов, передаваемых между КРС и базовыми станциями. Порог показывает, как часто необходима поправка уровня мощности сигналов, передаваемых между базовыми станциями и КРС. Если параметр t счетчика времени не выше порога, способ возвращается к этапу 600. В противоположном случае параметр t счетчика времени показывает, что настало время для поправки уровня выходной мощности базовых станций, задействованных в передаче при макроразнесении. Поэтому на этапе 640 сообщения об измеренных уровнях мощности передаются от базовой станции на КРС и новые уровни выходной мощности базовой станции передаются от КРС на базовые станции. Затем способ возвращается к этапу 600.
Вариантом уменьшения уровней мощности для управления ими при передаче сигналов между КРС и базовыми станциями, не показанном на фиг.6, является уменьшение величины ступеньки при подстройках уровней выходной мощности посредством КРС.
Этот способ модифицированного управления мощностью может быть реализован в любой системе, использующей макроразнесение. Это способ особенно выгоден для систем, в которых используется управление мощностью базовых станций и в которых часто подстраиваются уровни выходной мощности базовых станций.
Следующее описание объясняет, как происходит передача сигналов в различных иллюстрирующих сценариях, но специалист в данной области поймет, что передача сигналов может быть осуществлена и другими способами. Следующее описание только рассматривает случаи, в которых мобильная станция входит в макроразнесение при одной новой базовой станции и мобильная станция первоначально не задействована в передаче при макроразнесении. Легко вообразить себе другие сценарии, например, случаи, в которых мобильная станция соединена с более чем двумя базовыми станциями; случаи, в которых мобильная станция выходит из макроразнесения с одной или несколькими базовыми станциями и то же время входит в макроразнесение с одной или несколькими базовыми станциями, или случаи, в которых базовые станции соединены с различными КРС.
В первом сценарии в мобильной станции принимается решение, какую использовать схему управления мощностью. Когда присоединяется новая базовая станция макроразнесения и задействовано управление мощностью способом замкнутой петли, мобильная станция указывает, что она хочет изменить скорость команд управления мощностью посредством передачи сообщения на базовые станции. Сообщение содержит информацию о мобильной станции, а также информацию о том, как должна изменяться скорость команд управления мощностью. Когда базовая станция, которая определена для приема сообщения, принимает сообщение, эта базовая станция отвечает сигналом подтверждения приема (СПП). Чтобы избежать приема сообщения только одной базовой станцией, требуется некоторая передача сигналов по фиксированной сети, например, чтобы проверить, что все задействованные базовые станции осведомлены и готовы к предлагаемой модификации и чтобы осведомить КРС и дать ему подготовиться к модификации.
Как только мобильная станция примет по меньшей мере один СПП от базовых станций, она передает сообщение, указывающее, что она начинает использовать новую схему управления мощностью. Мобильная станция затем подготавливается к новой схеме управления мощностью и начинает следовать ей.
Когда базовая станция принимает сообщение, которое указывает, что мобильная станция начала использовать новую схему управления мощностью, она извещает другие задействованные базовые станции, а также КРС. В то же время базовые станции начинают следовать новой схеме управления мощностью.
Чтобы использовать кодированные команды управления мощностью, включая повторение, базовые станции должны использовать буфферизацию принятых команд управления мощностью перед тем, как они подстроят свои выходные мощности. Если мобильная станция передает различные сообщения на различные базовые станции, это может быть достигнуто или приданием адреса каждому сообщению о команде управления мощностью, или, что более предпочтительно, давая знать базовым станциям, к каким командам управления мощностью они должны прислушиваться. Это может быть достигнуто использованием конфигурации для команд управления мощностью. Например, каждая последующая позиция команды управления мощностью может быть посвящена определенной базовой станции. Однако предполагая, что базовые станции не замечают, что мобильная станция изменяет скорость команд управления мощностью, или что СПП потерян, тогда мобильная станция должна повторно передать утерянное сообщение.
Можно, конечно, изменить схему управления мощностью во время макроразнесения. Мобильная станция может вернуться к обычной схеме управления мощностью как раз перед тем, как закончится передача во время макроразнесения. В связи с тем, что и сеть связи, и мобильная станция знают, когда это произойдет, требуется незначительная передача сигналов или не требуется дополнительной передачи сигналов.
В другом сценарии решение изменить схему управления мощностью принимается в сети связи, например, в КРС. В этом сценарии как только мобильная станция входит в макроразнесение с новой базовой станцией и способ замкнутой петли задействован, КРС извещает задействованные базовые станции о требующейся схеме управления мощностью. Это сообщение также передается на мобильную станцию. Как базовые станции, так и мобильная станция подготавливаются к новой схеме, и мобильная станция передает сообщение, указывающее, что она начала использовать новую схему управления мощностью, базовым станциям. Базовые станции отвечают СПП. Так как базовые станции сообщаются одна с другой, применяя фиксированную сеть, мобильной станции требуется только принять один СПП. Если в течение некоторого времени не принимается никакого СПП, мобильная станция передает новое сообщение о начале.
Для случая, когда изменяют величину ступеньки, мобильная станция не должна быть задействована в какой-либо передаче сигналов, если мобильная станция не решает, какую величину ступеньки использовать, так как сеть знает, когда начнется макроразнесение, и КРС может просто приказать задействованным базовым станциям изменить их величины ступенек.
Обычная схема управления мощностью должна быть восстановлена, когда мобильная станция выходит из макроразнесения. Это может быть достигнуто без добавления значительной передачи сигналов по эфирному интерфейсу.
В соответствии с настоящим изобретением передача сигналов между базовыми станциями и КРС для подстройки выходной мощности базовых станций значительно уменьшается при передаче во время макроразнесения. Управление мощностью по замкнутой петле может поддерживаться в течение всего сеанса пониженной передачи сигналов между базовыми станциями и КРС. Помимо этого повышается точность, с которой команды управления мощностью принимаются базовыми станциями от мобильной станции. Далее мобильная станция может передавать различные команды на различные базовые станции, создавая гибкую систему связи и избегая смещения уровней мощности.
Из описанного таким образом изобретения становится очевидно, что оно может быть изменено во многом. Такие изменения не рассматриваются как отход от идеи и объема изобретения, и все такие модификации, очевидные специалисту в данной области, должны быть включены в объем следующей формулы изобретения.
Изобретение относится к области радиотехники и предназначено для управления уровнями мощности сигналов, передаваемых базовыми станциями удаленной станции во время макроразнесения. Во время макроразнесения первая и вторая базовые станции передают контроллеру полученные от мобильной станции сообщения об уровне мощности принятого сигнала. Контроллер сравнивает полученные сообщения и передает соответствующие команды для подстройки уровней мощности на первую и вторую базовые станции. Команды контроля уровней мощности от удаленной станции на базовые станции во время макроразнесения передают менее часто. Также во время макроразнесения величина ступеньки для подстройки уровня мощности контроллером уменьшается. Технический результат - повышение эффективности управления, а также уменьшение требований к передаче сигналов между базовыми станциями и контроллером. 2 с. и 10 з.п. ф-лы, 6 ил.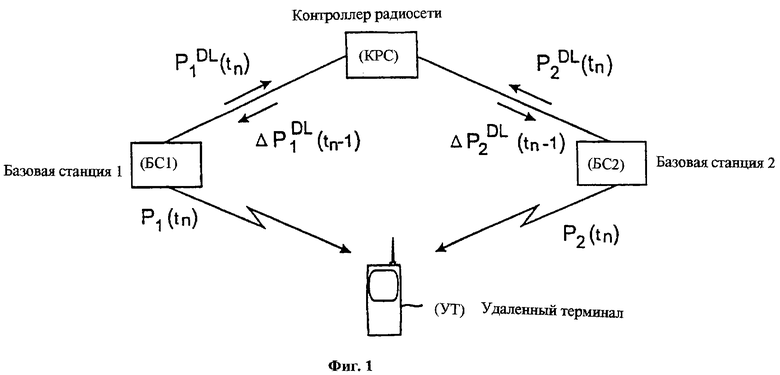
| WO 9221196 А1, 22.11.1997 | |||
| Устройство для маркировки крышек | 1977 |
|
SU682417A1 |
| WO 9708911 А1, 06.03.1997 | |||
| Шаговый электрогидравлический привод | 1976 |
|
SU577322A1 |
| ГРОМАКОВ Ю.А | |||
| Стандарты в системах подвижной связи | |||
| Мобильные телесистемы | |||
| - М.: Эко-Трендз, 1997, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |

