Изобретение относится к способу синхронизации связи разделенных на кадры данных через асинхронные базовые станции в системе сотовой связи, например системе МДКР (Множественный Доступ с Кодовым Разделением каналов). Способ синхронизации осуществляется непрерывно, но особенно при установлении соединения и во время выполнения "мягкого" переключения (перехода подвижной станции из одной сотовой ячейки в другую в процессе вызова).
Это изобретение также направлено на устройство для осуществления вышеупомянутого способа.
Уровень техники
Сегодня наблюдается возрастающий интерес к использованию МДКР или систем с расширенным спектром в коммерческих применениях. Некоторые примеры включают цифровую сотовую радиосвязь, наземную подвижную радиосвязь, спутниковые системы и внутриучрежденческие и наружные персональные сети связи, упоминаемые здесь совместно как сотовые системы.
МДКР позволяет сигналам перекрываться как по времени, так и по частоте. Таким образом, сигналы МДКР совместно используют один и тот же спектр частот. В частотном диапазоне или периоде времени сигналы множественного доступа оказываются наложенными один на другой.
Имеется ряд преимуществ, связанных со способами связи МДКР. Пределы пропускной способности сотовых систем на основе МДКР широки. Это является результатом характеристик широкодиапазонной системы МДКР, таких как повышенное разнесение интерференции, стробирование речевой активности и повторное использование того же спектра частот в разнесении интерференции.
В принципе, в системе МДКР поток информационных данных, который должен быть передан, накладывается на поток данных со значительно большей скоростью передачи, известный как последовательность сигнатуры. Обычно данные последовательности сигнатуры являются двоичными, обеспечивающими поток битов. Один способ генерировать эту последовательность сигнатуры - это с помощью PN-процесса (псевдошума), который является произвольным, но может быть выделен специальным приемником. Поток информационных данных и высокоскоростной поток битов последовательности сигнатуры объединяются путем умножения этих двух потоков битов один на другой в предположении, что двоичные значения этих двух потоков битов представлены значениями +1 или -1. Это объединение сигнала с большей скоростью передачи битов с потоком данных с меньшей скоростью передачи битов называется расширением сигнала потока информационных данных. Каждому потоку информационных данных, или каналу, назначен уникальный код расширения. Отношение между скоростью передачи битов последовательности сигнатуры и скоростью передачи битов информации называется коэффициентом расширения.
Множество сигналов кодированной информации модулирует несущую радиочастоты, например, с помощью КФМ (Квадратурная фазовая манипуляция), и совместно принимается как сложный сигнал в приемнике. Каждый из кодированных сигналов, а также относящиеся к шуму сигналы перекрывают все остальные кодированные сигналы как по частоте, так и по времени. Если используется зарегистрированный приемник, тогда этот составной сигнал сопоставляется с одним из уникальных кодов, и соответствующий информационный сигнал может быть выделен и дешифрован.
В системе МДКР, называемой также ПП-МДКР (МДКР прямой последовательности), чтобы отличить ее от СЧ-МДКР (МДКР со скачком частоты), "информационные биты", о которых упоминалось выше, могут быть также закодированными битами, причем используемый код является кодом блока или кодом свертки. Один или более информационных битов могут образовывать символ данных. Также последовательность сигнатуры или маска скремблирования речи может быть намного длиннее, чем одна кодовая последовательность, в этом случае к кодовой последовательности добавляется субпоследовательность последовательности сигнатуры или маски скремблирования речи.
В системе сотовой связи МДКР каждая сотовая метка имеет несколько блоков модулятора - демодулятора, или модемов расширенного спектра. Каждый модем состоит из цифрового модулятора передачи расширенного спектра, по меньшей мере одного цифрового приемника данных расширенного спектра и поискового приемника. Каждый модем на базовой станции BS может быть назначен подвижной станции как необходимый, чтобы устанавливать связь с назначенной подвижной станцией MS. Во многих случаях доступны для использования много модемов, в то время как другие из них могут быть задействованы в связи с соответствующими подвижными станциями. Для системы сотовой связи МДКР используется схема мягкого переключения, в которой модем новой базовой станции назначается подвижной станции, в то время как модем старой базовой станции продолжает обслуживать этот вызов. Когда подвижная станция расположена в зоне передачи между этими двумя базовыми станциями, она поддерживает связь с обеими базовыми станциями. Подобным образом, если одна базовая станция ответственна за более чем один географический сектор, переключение может быть осуществлено между разными секторами, принадлежащими к одной и той же базовой станции.
Когда связь подвижной станции установлена с новой базовой станцией или новым сектором, например подвижная станция имеет хорошую связь с новой сотовой ячейкой или сектором, тогда старая базовая станция/модем прекращает обслуживание этого вызова. Это мягкое переключение по существу является переключающей функцией, выполняемой до разъединения. Подвижная станция определяет самую лучшую новую базовую станцию или сектор, к которым должна быть передана связь от старой базовой станции или сектора. Хотя предпочтительно, чтобы подвижная станция инициировала запрос на переключение и определяла новую базовую станцию, выбор процесса переключения может быть сделан как в обычной сотовой телефонной системе, в которой базовая станция определяет, когда переключение может быть подходящим, и через контроллер системы запрашивает соседние сотовые ячейки или сектора, чтобы они поискали сигнал этой подвижной станции. Базовая станция, получившая самый сильный сигнал, что определено контроллером системы, после этого принимает переключение.
В системе сотовой связи МДКР каждая базовая станция обычно передает пилот-сигнал несущей в каждом из своих секторов. Этот пилот-сигнал используется подвижными станциями, чтобы получить начальную синхронизацию системы и обеспечить грубое отслеживание времени, частоты и фазы передаваемых базовой станцией сигналов во время так называемой фазы синхронизации элементарной посылки радиоинтерфейса. RNC (Узел Управления Сетью Радиосвязи) поддерживает свою синхронизацию с КТСОП (Коммутируемой Телефонной Сетью Общего Пользования).
Активным набором для конкретной подвижной станции является список секторов, через которые осуществляется связь подвижной станции. Добавление и/или исключение секторов из активного набора называется ASU (Корректировка Активного Набора). Таким образом, обычное переключение от первой базовой станции (обслуживающей первый сектор) ко второй базовой станции (обслуживающей второй сектор) может быть определено как активный набор перед переключением, содержащий только первый сектор, и после переключения, содержащий только второй сектор. Переключение от первой ко второй базовой станции может, конечно, быть определено как активный набор, первоначально содержащий несколько секторов, в т.ч. первый сектор, но не второй сектор, и после переключения активный набор, содержащий несколько секторов, включая второй сектор, однако не первый сектор. Далее, переключение может быть выполнено либо между идентичными частотами, так называемое внутрирадиочастотное переключение (внутри RF-HO), либо между разными частотами, так называемое междурадиочастотное переключение (между RF-НО). Точное определение переключения, однако, не имеет значения для настоящего изобретения, поскольку это изобретение касается только корректировки активного набора, в частности добавления одного или более секторов к активному набору.
Активный набор может быть также различным для восходящей линии связи (канал от подвижной станции к базовой) и нисходящей линии связи (канал от базовой станции к подвижной) для отдельной подвижной станции. Например, возможно, что активный набор содержит много различных секторов одной и той же базовой станции для соединения восходящей линии связи, и только один из этих секторов для соответствующего соединения нисходящей линии связи.
Во время макроразнесения активный набор содержит сектора, которые обслуживаются более чем одной базовой станцией. Макроразнесение должно быть использовано во время мягкого переключения, в то время как жесткое переключение подразумевает, что активный набор никогда не содержит более одного сектора во время этой процедуры.
Синхронизация радиочастоты выполняется путем детектирования и выбора отдельной последовательности элементарных посылок, которая связана с самой мощной несущей радиочастоты, принятой подвижной станцией. Это позволяет осуществлять идентификацию базовой станции "наилучшего обслуживания". Упомянутая последовательность элементарных посылок относится к системному времени, которое используется, например, чтобы установить время передачи кадра радиоинтерфейса.
В системе МДКР перекрытие временных интервалов, как в системах МДВР (Множественный Доступ с Временным Разделением каналов) не является проблемой, поскольку подвижная станция передает непрерывно, и таким образом не нуждается в том, чтобы синхронизироваться с другими подвижными станциями. Однако, когда подвижная станция присоединена к более чем одной базовой станции в макроразнесении, есть необходимость синхронизировать базовые станции в нисходящей линии связи (известной также как прямая линия связи).
Макроразнесение в системе МДКР может быть достигнуто с синхронизированными базовыми станциями. Базовые станции обычно синхронизированы с цифровыми передачами всех базовых станций, относящимися к шкале времени общей системы МДКР, которая использует шкалу времени GPS (Глобальная Спутниковая Система Местоопределения), которая может отслеживаться UTC (Универсальное Координированное Время) и синхронна с ним. Сигналы от всех базовых станций передаются в один и тот же момент времени.
Для того чтобы разрешить макроразнесение, базовые станции могут быть синхронизированы, как описано выше, через общий эталон времени GPS. Поэтому сигналы, передаваемые от базовых станций, синхронизированы по времени. Однако, благодаря различию задержек распространения в линиях связи, сигналы поступают на подвижную станцию в разные моменты времени. Обычно в системах МДКР используется собирающий приемник, чтобы обрабатывать временной разброс, и макроразнесение может быть рассмотрено как временной разброс со стороны приемника. Принцип действия собирающего приемника состоит в собирании потоков энергии от разных трактов и объединении их до того, как выполнена выборка битов.
Способы для непрерывного контроля параметров задержки между двумя узлами в АТМ или сети передачи кадров известны из патента US A, 5450394. Специальные измерительные элементы содержат временную метку, показывающую время, когда элемент послан, и величину задержки, которая показывает разницу между временами приема и передачи.
Документ US A, 4894823 описывает альтернативный способ для временной маркировки пакетов данных, которые передаются через фиксированную сеть связи. Задержки, испытываемые пакетами данных в узлах сети, измеряются путем вставки значения времени начала вызова в заголовок каждого пакета при входе в узел, и изменения этого значения времени в функции метки времени выхода, когда пакет был передан через этот узел.
Способ временного согласования передач по нисходящим линиям связи в системе МДКР описан в документе WO, A1, 94/30024. Сигналы для соединения отдельного сотового вызова синхронизируются через, во-первых, измерение подвижной станцией разности времени между сигналом подключенной базовой станции и сигналом базовой станции предполагаемого макроразнесения. Это измерение, во-вторых, передается к сети, которая в конце концов компенсирует эту разность и синхронизирует базовые станции, так чтобы переключение было выполнено там, где бы не было потери данных во время этой процедуры.
Документы US A, 5450394 и А, 4894823 обеспечивают решения для оценки задержек передачи в системах связи данных, разделенных на кадры. Однако эти документы не объясняют, как достичь синхронизированной связи между многими базовыми станциями и конкретной подвижной станцией несмотря на эти задержки.
Согласно документу WO, A1, 94/30024 известен способ для выполнения согласования времени передач по нисходящим линиям связи в системе МДКР. Тем не менее, отсутствует решение, как эти передачи должны управляться, когда разности в задержке между сигналами, передаваемыми от разных базовых станций, превосходят длительность половины кадра данных.
Сущность изобретения
Задачей настоящего изобретения таким образом является минимизация ошибки синхронизации между кадрами информации, которые посылаются к отдельной подвижной станции от двух или более асинхронных базовых станций или секторов. Асинхронные здесь означает, что разрешается разность фаз между сигналами, передаваемыми от по меньшей мере двух разных базовых станций, и что элементы синхронизации в разных базовых станциях не синхронизированы друг с другом.
Другой задачей этого изобретения является исключение необходимости полагаться на приемник эталона внешнего времени в каждой асинхронной базовой станции с целью соответствия требованиям синхронизации во время корректировки активного набора для подвижной станции.
Другой задачей этого изобретения является минимизация потребности для буферизации в асинхронных базовых станциях, которые одновременно принимают кадры информации от определенной подвижной станции.
Дополнительной задачей этого изобретения является уменьшение потребности в буферизации в подвижных станциях и таким образом упрощение конструкции подвижных станций.
Еще одной задачей этого изобретения является минимизация среднего значения задержки прохождения сигнала туда и обратно, возникающей в системах сотовой радиосвязи и в системе связи МДКР, в частности. Под задержкой прохождения сигнала туда и обратно здесь подразумевается общее время, которое она займет (в среднем) для гипотетического сообщения, посланного от одного конца соединения к другому и обратно.
Эти задачи решаются настоящим изобретением путем генерации определенных состояний счетчика кадров системы в центральном узле в системе - узле управления радиосетью, присоединенном к одной или более базовым станциям. Соответствующие состояния локальных счетчиков кадров генерируются в каждой базовой станции в системе. Текущая выборка состояния счетчика кадров системы регулярно посылается из узла управления радиосетью к ее присоединенным базовым станциям с целью синхронизации каждого локального счетчика кадров с состоянием счетчика кадров системы, которая действует в качестве эталона нумерации кадров в системе сотовой радиосвязи.
Согласно одному аспекту настоящего изобретения предложен способ регулярной посылки состояния счетчика кадров системы от центрального узла к его присоединенным базовым станциям. Каждая из базовых станций устанавливает свои состояния локальных счетчиков кадров, так чтобы они все были согласованы с состоянием счетчика кадров системы. Синхронизация пакетов данных, передаваемых через базовые станции, затем выполняется путем посылки одного пакета данных на кадр данных, который пронумерован в соответствии с состоянием счетчика кадров. Состояния счетчика кадров находятся в ветви соединения восходящей линии связи локально сгенерированные в каждой базовой станции, и в ветви соединения нисходящей линии связи, причем состояния счетчиков кадров получаются из состояний счетчика кадров системы в центральном узле, который обычно является узлом управления радиосетью.
Вышеописанный способ таким образом характеризуется тем, что определено в пункте 1 формулы изобретения.
Согласно другому аспекту настоящего изобретения предложен способ установления связи между отдельной подвижной станцией и по меньшей мере одной базовой станцией, который основан на вышеприведенном способе синхронизации. Во-первых, для подвижной станции определяется активный набор, содержащий по меньшей мере один канал нисходящей линии связи и один канал восходящей линии связи. Базовая станция (станции), в которой такие каналы должны быть распределены, определяется (определяются) измерениями уровня пилот-сигнала, выполняемыми подвижной станцией. В общем, все сектора, величина уровня пилот-сигнала которых превосходит заданное пороговое значение, являются кандидатами для включения в активный набор. Тем не менее, канал нисходящей линии связи не обязательно должен быть распределен во всех таких секторах, и не более чем один канал восходящей линии связи должен быть вообще назначен. Во-вторых, для каждого канала нисходящей линии связи в активном наборе устанавливается величина опережения синхронизации. Величина опережения синхронизации определяет сдвиг между общим каналом управления нисходящей линии связи для сектора и рассматриваемым каналом нисходящей линии связи и выбирается так, чтобы приводить к наиболее равномерному распределению нагрузки передачи в сети и радиоресурсов в системе по отношению к соединениям, уже находящимся в действии. Каждая базовая станция измеряет с постоянными интервалами сдвиг общего канала управления нисходящей линии связи между ее состояниями локального счетчика кадров и общим каналом управления нисходящей линии связи для каждого из ее секторов. Результаты этих измерений сообщаются центральному узлу. Как третья операция, вычисляется сдвиг канала нисходящей линии связи путем прибавления сдвига общего канала управления нисходящей линии связи к величине опережения синхронизации. И наконец, назначается конкретный номер кадра каждому кадру данных на каждом соответствующем канале нисходящей линии связи. Номер кадра показывает, в каком кадре данных должен быть передан отдельный пакет данных, который принят от центрального узла. Кадры данных нумеруются согласно следующему правилу. Начальный кадр данных, начинающийся величиной смещения канала нисходящей линии связи после текущего состояния локального счетчика кадров, задает номер кадра, равный текущему состоянию локального счетчика кадров. Локальный счетчик кадров, в среднем, увеличивается с частотой импульсов сигнала времени, которая соответствует одному импульсу на длительность кадра данных. Однако, благодаря установкам локального счетчика кадров согласно корректировкам от состояния счетчика кадров системы, локальный счетчик кадров может временно иметь частоту импульсов сигнала времени, которая либо немного выше, либо немного ниже, чем один импульс на длительность кадра данных. Последующие кадры данных получают номера кадров согласно их порядку следования относительно начального кадра данных.
Способ установления соединения согласно этому аспекту изобретения, таким образом, характеризуется тем, что определено в пункте 10 формулы изобретения.
Согласно дополнительному аспекту настоящего изобретения предложен способ начала связи через по меньшей мере один второй сектор с конкретной подвижной станцией, которая уже обменивается информацией через по меньшей мере один первый сектор, путем использования вышеописанного способа синхронизации. Во-первых, подвижная станция измеряет смещение кадра между каналом нисходящей линии связи в активном наборе и общим каналом управления нисходящей линии связи сектора-кандидата для ASU. Во-вторых, величина смещения кадра сообщается центральному узлу. В-третьих, второй сектор добавляется к активному набору. В-четвертых, вычисляется величина опережения синхронизации и величина смещения канала нисходящей линии связи для канала нисходящей линии связи во втором секторе. Пятое, смещение между кадрами данных, которые должны быть переданы на канале нисходящей линии связи во втором секторе, и общим каналом управления нисходящей линии связи для этого сектора устанавливается равным величине опережения синхронизации. Наконец, каждому кадру данных в канале нисходящей линии связи во втором секторе дается конкретный номер кадра. Это осуществляется путем назначения начальному кадру данных, который, начинаясь от состояния локального счетчика кадров в базовой станции, обслуживающей второй сектор, плюс величина смещения канала нисходящей линии связи, попадает в пределы половины длительности кадра данных, номера кадра, равного следующему состоянию локального счетчика кадров в базовой станции, обслуживающей второй сектор. Каждому последующему кадру данных затем назначается целое приращение начального номера, которое равно порядку следования каждого соответствующего кадра данных относительно начального кадра данных.
Способ начала связи через дополнительный сектор, когда связь уже осуществляется через первый сектор, согласно этому аспекту изобретения, таким образом, характеризуется тем, что определено в пункте 11 формулы изобретения.
Устройство согласно данному изобретению для обмена разделенной на кадры информацией в системе сотовой радиосвязи содержит один или более центральных узлов плюс одна или более базовых станций. Центральный узел, который обычно является узлом управления радиосетью, содержит в свою очередь главный блок синхронизации, главный блок управления и блок переключения разнесения. Главный блок синхронизации генерирует состояния счетчика кадров системы, которые посылаются к базовым станциям, которые присоединены к центральному узлу. Главный блок управления является основным блоком для центрального узла. Этот блок, например, определяет, когда выполнять ASU. Кроме того, он вычисляет величины опережения синхронизации и величины смещения канала нисходящей линии связи, которые используются при нумерации кадров данных в каналах нисходящей линии связи. Блок переключения разнесения отвечает за обработку одновременных связей с подвижной станцией через более чем одну базовую станцию.
Вышеупомянутое устройство согласно этому изобретению, таким образом, характеризуется тем, что определяется из пункта 22 формулы изобретения.
Настоящее изобретение, таким образом, предлагает решение для выполнения корректировки активного набора (например, совместно с выполнением мягкого переключения) в системе сотовой радиосвязи, содержащей асинхронные базовые станции, без потребности в приемниках GPS в какой-либо базовой станции.
Предлагаемое решение также гарантирует синхронизацию во время установления соединения к асинхронной базовой станции.
Такие небольшие ошибки синхронизации приводят к низким средним значениям задержек прохождения сигнала туда и обратно в системе и позволяют, чтобы соединения для передачи данных между узлом управления радиосетью и базовыми станциями были асинхронными, например соединениями АТМ.
Это также гарантирует, что не будет ошибок скольжения кадров в соединении ни в нисходящей линии связи, ни в восходящей линии связи. Более того, потребность в буферизации может быть снижена как в базовых станциях, так и в подвижных станциях.
Как следствие низкой потребности в буферизации, подвижные станции могут быть выполнены более простыми и с простыми собирающими приемниками.
Описание фигур
Фиг.1 показывает ранее известную систему сотовой радиосвязи МДКР, присоединенную к фиксированной сети связи.
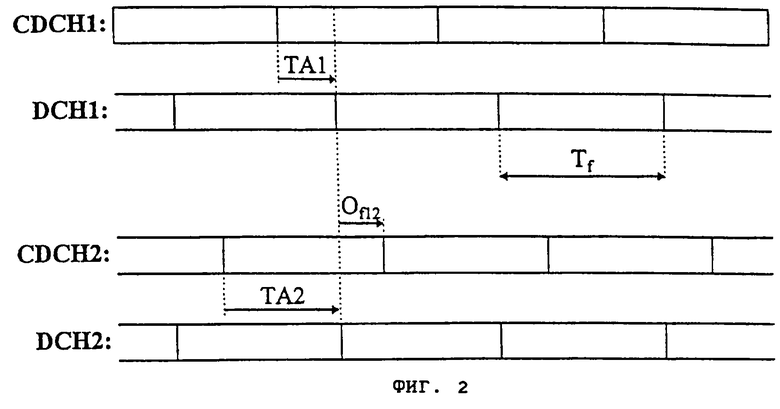
Фиг.2 иллюстрирует ранее известный способ синхронизации радиоинтерфейса.
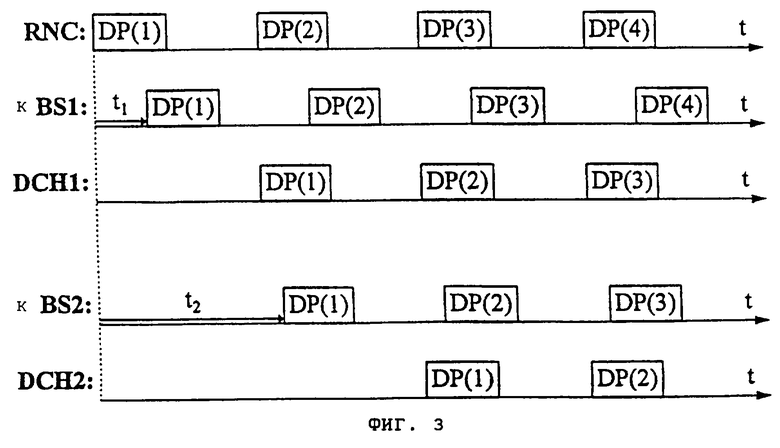
Фиг.3 поясняет проблему скольжения кадра, которое может возникать в способе, показанном на фиг.2.
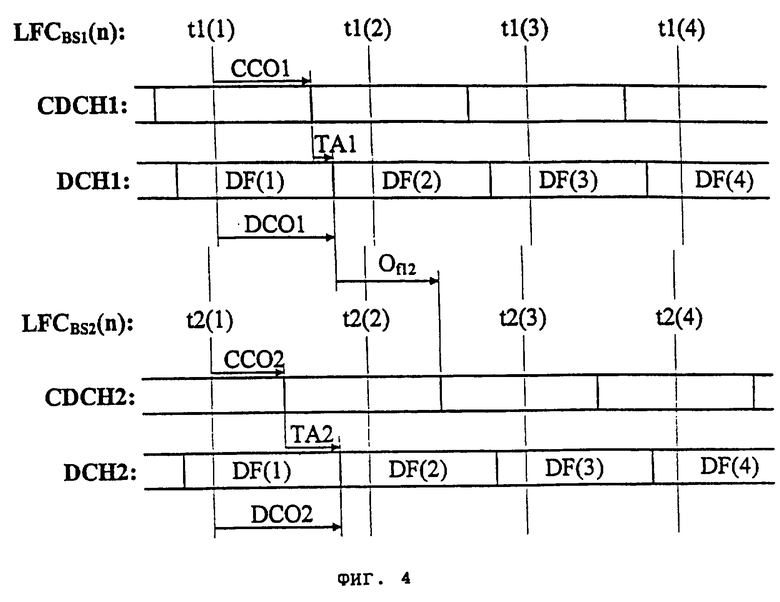
Фиг. 4 иллюстрирует способ синхронизации радиоинтерфейса согласно одному из примеров осуществления этого изобретения.
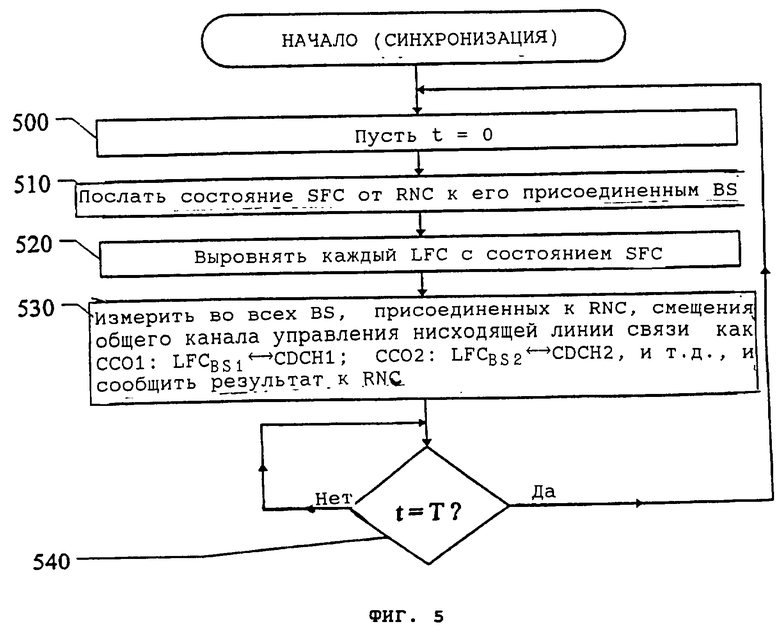
Фиг. 5 показывает блок-схему по заявленному способу синхронизации асинхронных базовых станций.
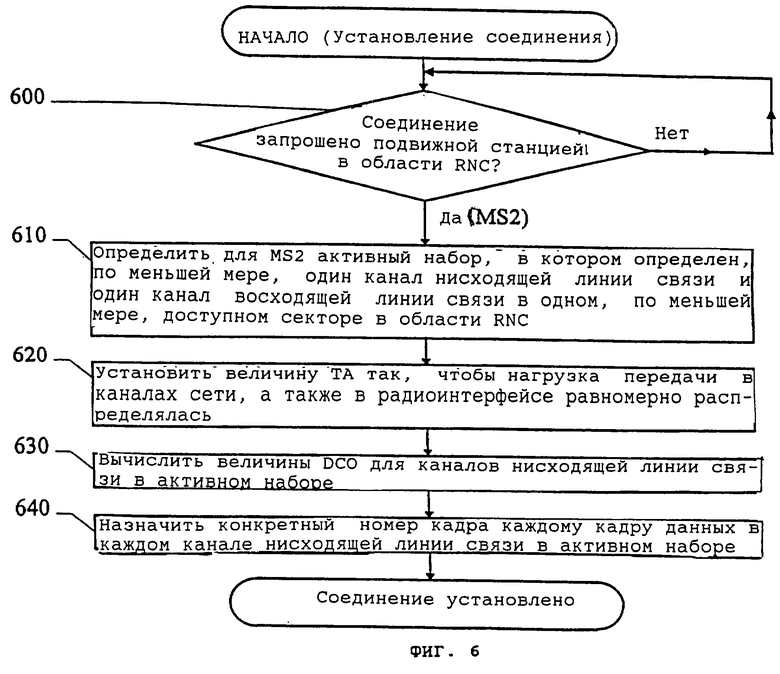
Фиг. 6 показывает блок-схему согласно примеру осуществления заявленного способа установления соединения в системе сотовой радиосвязи.
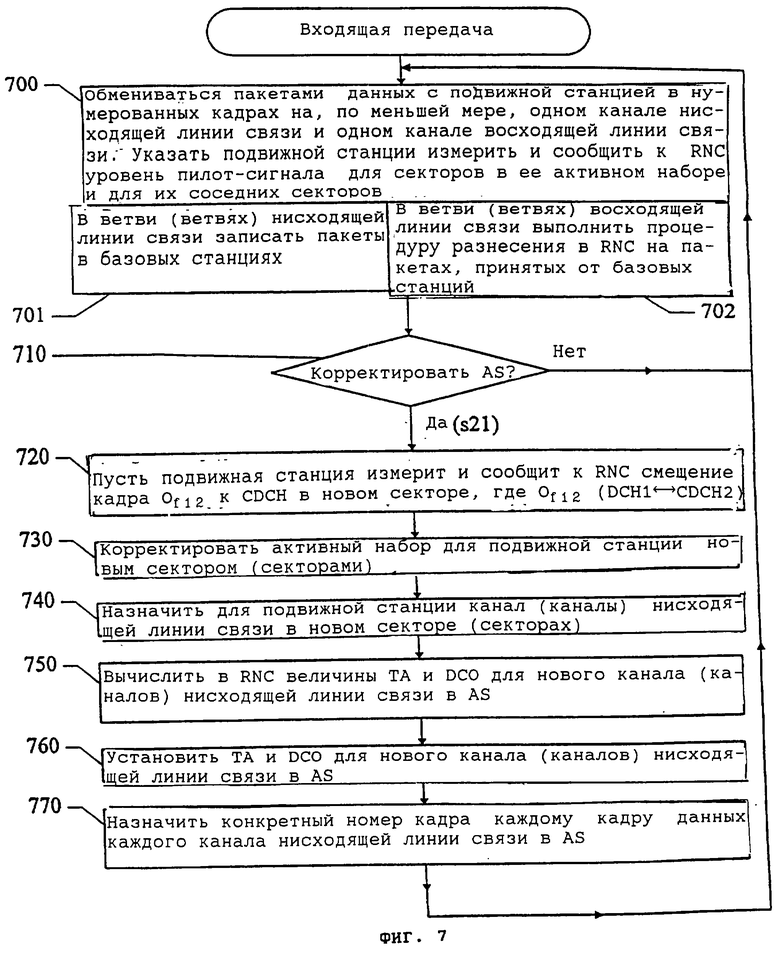
Фиг. 7 показывает блок-схему согласно примеру осуществления заявленного способа начала связи через второй сектор во время связи через первый сектор в системе сотовой радиосвязи.
Фиг. 8 показывает устройство согласно примеру осуществления этого изобретения.
Изобретение теперь будет описано более подробно с помощью предпочтительных примеров осуществления и со ссылкой на прилагаемые чертежи.
Предпочтительные примеры осуществления
На фиг.1 показана по существу ранее известная система сотовой радиосвязи МДКР 100, присоединенная к фиксированной сети связи 10, как например сеть КТСОП. Естественно, фиксированная сеть связи 10 может представлять собой любой тип сети, которая приспособлена к типу данных, передаваемых через систему сотовой радиосвязи МДКР 100. Если, например, пакетные данные передаются в системе МДКР 100, фиксированная сеть 10 предпочтительно является сетью PSPDN (Пакетно Коммутируемая Сеть Общего Пользования, ПКСОП), сетью, действующей согласно IP (Протокол Интернет), сетью АТМ или сетью передачи кадров.
Узел MSC (Центр Коммутации Служб подвижных абонентов, ЦКСП) соединяет систему сотовой радиосвязи МДКР 100 с фиксированной сетью связи 10. Узел MSC может быть, в частности, так называемым Центром Коммутации Служб подвижных абонентов станции сопряжения, если он имеет соединения с сетью связи вне системы сотовой радиосвязи МДКР 100. Узел MSC через, например, соединения АТМ дополнительно контактирует с узлами управления радиосетью RNC1 и RNC2, каждый из которых присоединен к одной или нескольким базовым станциям BS1, BS2 и BS3-BS5 соответственно через отдельные соединения АТМ. Может быть также специальное соединение 110 между узлами управления радиосвязью RNC1 и RNC2, что делает возможным синхронизировать один узел управления радиосетью от другого в режиме главный - подчиненный, например, RNC1 является главным, а RNC2 - подчиненным. Или же все узлы управления радиосетью RNC1, RNC2 могут быть синхронизированы от узла MSC. Каждая базовая станция BS1-BS5 ответственна за радиосвязь в определенных географических областях, так называемых секторах s11-s16, s21-s26, s31-s36, s41-s46 и s51-s56 соответственно.
Определенный сектор идентифицируется по меньшей мере одним общим каналом управления нисходящей линии связи, который отличается от всех других ближайших каналов либо специфической последовательностью элементарных посылок, либо специфической последовательностью элементарных посылок в комбинации с конкретной частотой. Подвижные станции MS1-MS4 поддерживают связь с одной или более базовыми станциями BS1-BS5 на выделенных каналах. Ветвь нисходящей линии связи такого соединения устанавливаются через по меньшей мере один канал нисходящей линии связи, а ветвь восходящей линии связи устанавливается через канал восходящей линии связи. Каждый сектор s11-s56 в общем имеет свой собственный набор каналов нисходящей и восходящей линий связи. Однако набор является адаптивным, так что включенные каналы могут изменяться. Когда подвижная станция поддерживает связь с базовыми станциями через более чем один сектор, она должна, таким образом, настраиваться на более чем один канал нисходящей линии связи для декодирования данных, которые принимаются.
Первая подвижная станция MS1 первоначально находится в связи с базовой станцией BS2 в секторе s24. Передача пакетов данных между подвижной станцией MS1 и базовой станцией BS2 синхронизируется первым узлом управления радиосетью RNC1. Когда подвижная станция MS1 входит в другой сектор s23, измеренный пилот-сигнал для этого сектора s23 возрастает до уровня, достаточного для того, чтобы сектор s23 стал кандидатом для ASU (Корректировки Активного Набора). Т. е. начнется связь между подвижной станцией MS1 и базовой станцией BS2 через сектор s23. Подвижная станция MS1 измеряет величину сдвига кадра между ее текущим каналом нисходящей линии связи в секторе s24 и общим каналом управления нисходящей линии связи в секторе s23. Результат этого измерения затем через базовую станцию BS2 сообщается узлу управления радиосетью RNC1, в котором вычисляется величина опережения синхронизации. Величина опережения синхронизации используется для синхронизации канала нисходящей линии связи в секторе s23 с каналом нисходящей линии связи, используемым подвижной станцией MS1 в секторе s24. После выполнения синхронизации двух каналов нисходящей линии связи активный набор для соединения с подвижной станцией М31 корректируется, и начинается связь с базовой станцией BS2 через сектор s23.
Возможно, что связь через сектор s24 разъединяется до того, как связь через сектор s23 закончилась. Однако этого не должно быть в случае, если, например, подвижная станция MS1 снова входит в сектор s24. Это происходит, наоборот, тогда, когда более вероятно, что связь через сектор s23 прекратилась первой.
Вторая подвижная станция MS2 устанавливает связь с базовой станцией BS1 в секторе s14. Вторая подвижная станция MS2 регулярно выполняет измерения смещения кадра и уровня пилот-сигнала для соседних с сектором s14 секторов и сообщает результаты этих измерений узлу управления радиосетью RNC1 через базовую станцию BS1. Когда измерение уровня пилот-сигнала показывает, что связь может быть более эффективно осуществлена через другой сектор s21 и поэтому должна быть продолжена там, канал нисходящей линии связи в секторе s21 будет, таким образом, легко синхронизирован с текущим каналом нисходящей линии связи подвижной станции MS2 в секторе s14. Однако сектор s21 обслуживается базовой станцией BS2, отличающейся от базовой станции BS1, обслуживающей сектор s14. Синхронизация между каналами нисходящей линии связи в секторах s14 и s21 также достигается путем вычисления величины опережения синхронизации в узле управления радиосетью RNC1. Активный набор для подвижной станции MS2 корректируется от узла управления радиосетью RNC1, и связь продолжается в секторе s21. Связь через сектор s14 может поддерживаться или не поддерживаться в зависимости от того, какое значение уровня пилот-сигнала измеряет подвижная станция MS2 для сектора s21 относительно заданного порогового значения, при котором выполняется ASU.
Конечно, подвижная станция MS3 может подобным образом поддерживать одновременную связь через более чем два сектора, например s32, s45, s51 и s56, которые обслуживаются более чем двумя базовыми станциями BS3-BS5. В таком случае, когда все базовые станции BS3-BS5 присоединены к одному и тому же узлу управления радиосетью RNC2, синхронизация каналов нисходящей линии связи, используемых для связи, может быть выполнена согласно способу, описанному выше. Точная последовательность, в которой связь начинается и заканчивается через каждый соответствующий сектор s32, s45, s51 и s56, не имеет значения для того, как осуществляется синхронизация, и только является следствием измерений уровня пилот-сигнала относительно заданного порогового значения для выполнения ASU. Таким образом, подвижная станция MS3 может
поддерживать связь через все сектора s32, s45, s51 и s56 во время части вызова, во время всего вызова или периодически, через только один или более секторов в любой их комбинации.
Если измерение уровня пилот-сигнала, сообщенное подвижной станцией MS4, показывает, что связь должна быть инициирована через базовую станцию BS3, которая присоединена к узлу управления радиосетью RNC2, отличному от узла управления радиосетью RNC1, к которому присоединена используемая в настоящее время базовая станция BS1, тогда существенным является то, что участвующие узлы управления радиосетью RNC1, RNC2 синхронизируются друг с другом с целью достижения синхронизации в каналах нисходящей линии связи. Такая синхронизация требует центрального эталона времени. Это может быть выполнено многими альтернативными способами. Один способ состоит в том, чтобы разместить генератор эталонного времени в каждом из узлов управления радиосетью RNC1, RNC2, которые следят по нему, что сигналы синхронизации, генерируемые всеми узлами управления радиосетью RNC1, RNC2 в системе сотовой радиосвязи 100, находятся в фазе друг с другом. Другой способ состоит в том, чтобы иметь некоторые (или все) узлы управления радиосетью RNC1, RNC2 синхронизированными в режиме главный - подчиненный от центрального узла в системе 100, как например центр коммутации служб подвижных абонентов станции сопряжения GMSC или специальный главный узел управления радиосетью. Генератор эталонного времени предпочтительно состоит из приемника GSP, но он может быть, конечно, любым устройством для указания времени, которое имеет достаточную точность, как например атомные часы.
На фиг. 2 показан ранее известный способ синхронизации радиоинтерфейса относительно ASU. Подвижная станция в первом секторе осуществляет обмен кадрами данных в первом канале нисходящей линии связи DCH1, например принимает пакеты данных в кадрах данных в режиме синхронизации. Первый канал нисходящей линии связи DCH1 имеет величину первого опережения синхронизации ТА1 к первому общему каналу управления нисходящей линии связи CDCH1.
Когда измеренное значение уровня пилот-сигнала показывает, что должно быть выполнено ASU, подвижная станция получает указание от узла управления радиосетью измерить смещение Of12 кадра между его текущим каналом нисходящей линии связи DCH1 и вторым общим каналом управления нисходящей линии связи CDCH2 для второго сектора, который является кандидатом для активного набора. Измеренное значение смещения Of12 кадра сообщают узлу управления радиосетью, который вычисляет величину второго опережения синхронизации ТА2 путем вычитания величины смещения Оf12 кадра из длительности Тf кадра данных, т.е. ТА2= Tf-Of12. После этого величина второго опережения синхронизации ТА2 устанавливается для связи на втором выделенном канале DCH2 во втором секторе. Таким образом, выполняется ASU при достигнутой синхронизации. ASU означает в этом случае, что второй сектор добавлен к активному набору, после чего связь начинается во втором выделенном канале DCH2.
Фиг.3 показывает аспекты синхронизации известного решения, где набор пакетов данных DP(1)-DP(4) посылается от узла управления радиосетью RNC к первой и второй базовым станциям BS1 и BS2 соответственно. Первая копия набора пакетов данных DP(1)-DP(4) прибывает на первую базовую станцию BS1 после первого времени передачи t1, и затем посылается на первый канал нисходящей линии связи DCH1 к конкретной подвижной станции. Вторая копия набора пакетов данных DP(1)-DP(4) прибывает на вторую базовую станцию BS2 после второго времени передачи t2. Однако разность t2-t1 во времени передачи превосходит длительность Тf/2 половины кадра данных. Поэтому базовая станция BS2, имеющая свои сигналы более задержанными, чем другие, будет ошибочно посылать все пакеты данных DP(1)-DP(4) в кадрах данных, которые имеют сдвинутый по времени один кадр данных (или несколько, если t2 длиннее, чем длительность Tf множества кадров данных), на второй канал нисходящей линии связи DCH2. Имеет место так называемое скольжение кадра, которое приводит к разрушительной комбинации сигналов в подвижной станции. То есть сигналы, посланные от первой базовой станции BS1, и сигналы, посланные от второй базовой станции BS2, будут в подвижной станции в каждый данный момент времени содержать данные из разных пакетов данных, которые обычно содержат несовместимую информацию. Вследствие этого подвижная станция не сможет однозначно декодировать сигнал путем объединения пакетов кадров данных, принятых на выделенных каналах DCH1 и DCH2.
Проблема скольжения кадра, показанная на фиг.3, решена настоящим изобретением путем генерации состояний счетчика кадров системы SFC в каждом узле управления радиосетью системы сотовой радиосвязи. Состояния счетчика кадров системы SFC предпочтительно посылаются к базовым станциям на выделенных и отдельных соединениях, например соединениях АТМ, с целью гарантии как можно более постоянной задержки для этих сигналов.
Фиг.4 иллюстрирует аспекты синхронизации согласно этому изобретению, когда пакеты данных посылаются в кадрах данных DF(1)-DF(4) от узла управления радиосетью к подвижной станции через первый сектор, обслуживаемый первой базовой станцией BS1, которая использует первый канал нисходящей линии связи DCH1, в то время как передача кадров данных DF(1)-DF(4) была инициирована к подвижной станции через второй сектор, обслуживаемый второй базовой станцией BS2, которая использует второй выделенный канал DCH2. Первый и второй сектора связаны с первым CDCH1 и вторым CDCH2 общим каналом управления нисходящей линии связи соответственно. Обе базовые станции BS1, BS2 измеряют сдвиг общего канала управления нисходящей линии связи ССО1, ССО2 между их общим каналом управления нисходящей линии связи CDCH1, CDCH2 и соответствующим локальным счетчиком кадров LFCBS1, LFCBS2. Каждая базовая станция BS1, BS2 регулярно сообщает свой сдвиг общего канала управления нисходящей линии связи ССО1, ССО2 узлу управления радиосетью RNC.
Для того чтобы поддерживать высокую точность синхронизации при нумерации кадров, первая базовая станция BS1 регулярно принимает состояния счетчика кадров системы от узла управления радиосетью и генерирует из них через свой локальный счетчик кадров LFCBS1 синхронизированный первый ряд состояний локального счетчика кадров LFCBS1(n). Состояние локального счетчика кадров LFCBS1(n) достаточно часто корректируется из узла управления радиосетью, чтобы поддерживать ее менее смещенной от состояния счетчика кадров системы SFC, чем часть длительности Tf кадра данных, например одна десятая длительности Тf кадра данных.
Как можно видеть на фиг.4, имеется малый сдвиг фазы между первым локальным счетчиком кадров LFCBS1 и вторым локальным счетчиком кадров LFCBS2. Тем не менее, способ изобретения гарантирует, что кадры данных, относящихся к конкретному соединению, установленному через базовые станции BS1, BS2, всегда синхронизированы друг с другом.
Первый канал нисходящей линии связи DCH1 имеет первую величину опережения синхронизации ТА1 относительно первого общего канала управления нисходящей линии связи CDCH1. Первая величина опережения синхронизации ТА1 при установлении соединения устанавливается в значение, которое помещает конкретное соединение оптимально по времени так, чтобы распределить нагрузку передачи на ресурсы сети между базовой станцией BS1 и узлом управления радиосетью, а также радиоинтерфейсом так равномерно, насколько это возможно относительно соединений, уже находящихся в действии в пределах системы.
Смещение первого канала нисходящей линии связи DCО1 вычисляется как смещение ССО1 между общим каналом управления нисходящей линии связи CDCH1 в первом секторе и состоянием первого локального счетчика кадров t1(1) плюс величина первого опережения синхронизации ТА1, т.е. DCО1=ССO1+ТА1. Смещение первого канала нисходящей линии связи DCО1 используется при нумерации кадров данных DF(1)-DF(4). Компенсацией смещения общего канала управления нисходящей линии связи CCО1, CCО2 через смещение канала нисходящей линии связи DCО1 достигается точная синхронизация нумерации кадров с состояниями счетчика кадров системы SFC в базовой станции BS1.
В первой базовой станции BS1 каждый кадр данных DF(1)-DF(4) связан с конкретным номером кадра t1(1)-t1(4) из первого ряда состояний локального счетчика кадров LFCBS1(n). Эта нумерация кадров осуществляется назначением номера первого кадра t1(1), равного текущему состоянию локального счетчика кадров, первому кадру данных DF(1), в пределах времени, равного величине смещения первого канала нисходящей линии связи DCО1 текущего состояния локального счетчика кадров LFCBS1 (n) из первого ряда. Последующие кадры данных DF(2)-DF(4) нумеруются t1(2)-t1(4) согласно их порядку относительно первого кадра данных DF(1) путем увеличения номера кадра t1(2)-t1(4) один раз каждые Tf секунд.
Когда узел управления радиосетью показал, что второй сектор должен быть включен в активный набор, подвижная станция получает указание от узла управления радиосетью измерить величину смещения кадра Оf12 между ее текущим каналом нисходящей линии связи DCH1 и вторым общим каналом управления нисходящей линии связи CDCH2. Измеренная величина Оf12 затем сообщается узлу управления радиосетью, который вычисляет величину второго опережения синхронизации ТА2 для второго канала нисходящей линии связи DCH2 как длительность Tf кадра данных минус величина смещения кадра Оf12, т.е. ТА2=Tf-Оf12. Затем величина смещения второго канала нисходящей линии связи DCО2 устанавливается к смещению общего канала управления нисходящей линии связи ССО2 относительно второго канала нисходящей линии связи DCH2 плюс величина второго опережения синхронизации ТА2 плюс коэффициент i, умноженный на длительность Тf кадра данных, т.е. DCО2=ССО2+ТА2+i•Tf, где i есть целое число, положительное, отрицательное или равное нулю, которое выбирается такой величины, чтобы минимизировать модуль разности |DCO1-DCO2|min, между смещениями первого DCО1 и второго DCО2 каналов нисходящей линии связи. Более того, чтобы еще улучшить синхронизацию между первым DCH1 и вторым DCH2 каналами нисходящей линии связи, величина смещения первого канала нисходящей линии связи DCО1 может быть теперь заново вычислена как DCО1=ССО1+ТА1, т.е. сумма самой последней величины смещения общего канала управления нисходящей линии связи ССО1, переданной от первой базовой станции BS1 к узлу управления радиосетью RNC1, и величины опережения синхронизации ТА1 для первого канала нисходящей линии связи DCH1.
Как первая базовая станция BS1 принимает состояния счетчика кадров системы от узла управления радиосетью, так и вторая базовая станция BS2, где из них генерируется синхронизированный второй ряд состояний локального счетчика кадров LFCBS2(n). Во второй базовой станции BS2 также имеется каждый кадр данных DF(1)-DF(4), связанный с конкретным номером кадра t2(1)-t2(4), который извлечен из второго ряда состояний локального счетчика кадров LFCBS2(n). Первому кадру данных DF(1) в пределах времени, равного величине смещения второго канала нисходящей линии связи DCО2 текущего состояния локального счетчика кадров LFCBS2 (n) из второго ряда, назначается первый номер кадра t2(1). Последующие кадры данных DF(2)-DF(4) нумеруются t2(2)-t2(4) согласно их порядку относительно первого кадра данных DF(1) путем увеличения номера кадра t2(2)-t2(4) один раз каждые Tf секунд.
Путем установки величины смещения второго канала нисходящей линии связи DCО2 так, чтобы модуль разности |DCO1-DCO2|min между смещениями первого DCО1 и второго DCО2 каналов нисходящей линии связи был минимизирован, гарантируется, что номер текущего кадра данных t1(1) первого канала нисходящей линии связи DCH1 оптимально согласован с соответствующим номером кадра данных t2(1) второго канала нисходящей линии связи DCH2. После того как нумерация кадров данных во втором канале нисходящей линии связи DCH2 синхронизирована с нумерацией кадров данных в первом канале нисходящей линии связи DCH1, может быть начата передача кадров данных DF(1)-DF(4) во втором канале нисходящей линии связи DCH2.
Соответствующая синхронизированная нумерация кадров данных, конечно, выполняется и на соединениях базовая станция к RNC в ветви восходящей линии связи, т. е. когда пакеты данных передаются от подвижной станции в канале восходящей линии связи через один или более секторов и одну или более базовых станций. Каждая базовая станция затем связывает номер кадра с каждым кадром данных, который передается от базовой станции к узлу управления радиосетью в ветви восходящей линии связи, который равен номеру кадра соответствующего канала нисходящей линии связи для этого конкретного соединения.
Блок буфера в узле управления радиосетью записывает копии принятых пакетов данных и выполняет процедуру разнесения на пакетах данных, переданных в кадрах данных с идентичными номерами. Точные меры, предпринимаемые во время этой процедуры, будут более подробно описаны позднее при описании, в частности, со ссылкой на фиг.7 и 8.
На фиг. 5 показана блок-схема заявленного способа синхронизации всех асинхронных базовых станций, которые присоединены к конкретному центральному узлу. При первой операции 500 переменная таймера t устанавливается в ноль. Текущее состояние счетчика кадров системы SFC посылается от центрального узла RNC ко всем его присоединенным базовым станциям BS при второй операции 510. При следующей операции 520 состояние локального счетчика кадров LFC в каждой базовой станции согласовывается с состоянием счетчика кадров системы SFC. Каждая базовая станция, присоединенная к центральному узлу RNC, измеряет при следующей операции 530 смещение соответствующего общего канала управления нисходящей линии связи ССО1 между состоянием ее локального счетчика кадров LFCBS1, LFCBS2 и ее общим каналом управления нисходящей линии связи CDCH1, CDCH2. Результаты этих измерений сообщаются центральному узлу RNC, где вычисляются смещения канала нисходящей линии связи. Затем при операции 540 проверяется, равна ли переменная таймера t заданной величине Т, и если это так, процесс возвращается к первой операции 500. В противном случае процесс остается на операции 540, пока переменная t не станет равной заданной величине Т. Таким образом, заданная величина Т устанавливает частоту, с которой состояния локального счетчика кадров LFC должны будут корректироваться от состояния счетчика кадров системы SFC.
Фиг. 6 показывает блок-схему примера осуществления заявленного способа установления соединения между стационарной частью системы сотовой радиосвязи и конкретной подвижной станцией MS2. При первой операции 600 выясняется, запрашивается ли соединение с подвижной станцией в области ответственности определенного центрального узла RNC, и, если это именно такой случай, процесс переходит к следующей операции 610. В противном случае процесс снова возвращается к первой операции 600. Активный набор AS определяется для подвижной станции MS2 при операции 610. Активный набор определяет по меньшей мере один канал восходящей линии связи и один канал нисходящей линии связи для подвижной станции MS2 в пределах по меньшей мере одного сектора, который обслуживается базовой станцией, присоединенной к центральному узлу RNC. При следующей операции 620 устанавливается величина опережения синхронизации ТА для канала (каналов) нисходящей линии связи, которая дает наиболее равномерное распределение по времени ресурсов сети и канала, когда приняты во внимание соединения, уже действующие в системе. При операции 630 после этого для каждого канала нисходящей линии связи в активном наборе AS вычисляется величина смещения канала нисходящей линии связи DCO как сумма смещения общего канала управления ССО и величины опережения синхронизации ТА. Наконец, при операции 640 конкретный номер кадра FN назначается каждому кадру данных DF в канале (каналах) нисходящей линии связи следующим образом. Начальному кадру данных DF, начинающемуся величиной смещения канала нисходящей линии связи DCO после текущего состояния локального счетчика кадров, назначается номер кадра, равный следующему состоянию локального счетчика кадров базовой станции, которая обслуживает данный сектор. Последующим кадрам данных DF назначаются номера кадров FN согласно их порядку следования относительно начального кадра данных DF путем увеличения номера кадра один раз каждые Tf секунд.
Блок-схема примера осуществления заявленного способа начала связи через второй сектор с подвижной станцией, которая уже обменивается информацией через первый сектор, показана на фиг.7. Такое инициирование связи через дополнительный сектор эквивалентно добавлению нового сектора к непустому активному набору для подвижной станции MS. При первой операции 700 подвижная станция MS (например, вторая подвижная станция MS2 на фиг.1) обменивается пакетами данных DP в пронумерованных кадрах данных DF через по меньшей мере один канал нисходящей линии связи и один канал восходящей линии связи. Подвижная станция MS регулярно измеряет уровень пилот-сигнала для секторов, определенных в активном наборе AS, и для соседнего сектора и сообщает результаты центральному узлу RNC (например, первому узлу управления радиосетью RNC1 на фиг. 1). В ветвях соединения нисходящей линии связи имеются пакеты данных DP, буферизованные в обслуживающей базовой станции (станциях) до тех пор, пока пакеты данных DP не смогут быть посланы к подвижной станции MS в канале нисходящей линии связи в кадре данных, имеющем номер кадра, указанный узлом управления радиосетью RNC1, а в ветвях соединения восходящей линии связи имеются пакеты данных DP, буферизованные в центральном узле RNC, после чего выполняется процедура разнесения на пакетах данных DP, приходящих в кадрах данных DF с идентичными номерами кадров. Предел буфера в базовой станции (станциях) зависит от величины смещения канала нисходящей линии связи DCO и синхронизации передачи от узла управления радиосетью RNC1 для канала (каналов) нисходящей линии связи. Пакет данных DP, который поступил слишком поздно для того, чтобы быть посланным в кадре данных DF, указанном узлом управления радиосетью RNC1, отбрасывается в базовой станции. Подобное ограничение буфера существует для каналов восходящей линии связи в центральном узле RNC. Центральный узел выполняет процедуру разнесения либо когда все копии конкретного пакета данных DP поступили, либо после заданного времени τ. Заданное время τ может быть установлено исходя из множества разных факторов, таких как максимально допустимая задержка в системе, характеристики используемых каналов связи АТМ или процедуры синхронизации кадра. Процедура разнесения в свою очередь проводится согласно одному или двум принципам. Либо она выполняет выбор пакета данных DP с наивысшим качеством, либо она имеет в виду объединение энергии сигналов от всех принятых копий пакета данных DP. Истечение заданного времени τ может, конечно, заставить центральный узел выполнить макроразнесение не всех копий пакета данных DP.
При операции 710 с равными интервалами проверяется, должен ли корректироваться или нет активный набор AS, и если нет, то процесс возвращается к первой операции 700. Однако, если активный набор должен быть скорректирован (как например, добавлением сектора s21 к активному набору для второй подвижной станции MS2 на фиг.1), следует операция 720. В этой операции подвижная станция MS получает указание измерить величину смещения кадра Of12 между каналом нисходящей линии связи, указанным в настоящее время в активном наборе AS (например, DCH1), и общим каналом управления нисходящей линии связи для сектора-кандидата для ASU (например, CDCH2). Величина смещения кадра Of12 сообщается центральному узлу RNC. Активный набор AS затем корректируется новым сектором (секторами) в следующей операции 730, и в следующей операции 740 назначается канал нисходящей линии связи в новом секторе для передачи информации к подвижной станции MS. При следующей операции 750 в центральном узле RNC вычисляется величина опережения синхронизации ТА для нового канала нисходящей линии связи, как длительность кадра данных Тf минус величина смещения кадра Of12. Центральный узел RNC также вычисляет смещение канала нисходящей линии связи DCO для нового канала нисходящей линии связи (т. е. как должны нумероваться кадры данных DF нового канала нисходящей линии связи относительно состояний локального счетчика кадров в базовой станции, которая обслуживает новый сектор), как (1) смещение общего канала управления нисходящей линии связи между рядом состояний локального счетчика кадров в базовой станции, обслуживающей второй сектор, и общим каналом управления нисходящей линии связи в этом секторе, плюс (2) величина опережения синхронизации для нового канала нисходящей линии связи, плюс (3) целое кратное длительности Tf кадра данных DF, где целое число устанавливается в значение (положительное, отрицательное или ноль), которое минимизирует модуль разности между смещением канала нисходящей линии связи DCO1 в активном наборе AS и смещением канала нисходящей линии связи DCО2, который должен быть включен в активный набор AS (т.е. |DCO1-DCO2|min).
Вычисленное значение опережения синхронизации ТА и смещение канала нисходящей линии связи DCO устанавливается для нового канала в активном наборе AS в следующей операции 760, и при последней операции 770 конкретный номер кадра FN назначается каждому кадру данных DF нового канала нисходящей линии связи путем присвоения начальному кадру данных DF в новом канале нисходящей линии связи в пределах половины длительности Tf кадра данных DF, начинающегося с величины смещения канала нисходящей линии связи DCO после текущего состояния локального счетчика кадров, начального номера кадра FN, равного следующему состоянию локального счетчика кадров. Каждому последующему кадру данных DF назначается целое приращение этого начального номера кадра FN, равное порядку следования каждого соответствующего кадра данных DF относительно начального кадра данных DF. Процедура затем возвращается к первой операции 700.
Устройство согласно примеру осуществления этого изобретения для обмена информацией, разделенной на кадры, в системе сотовой радиосвязи изображено на блок-схеме на фиг.8.
Центральный узел в виде узла управления радиосвязью RNC1 здесь присоединен к первой BS1 и второй BS2 базовым станциям через, например, соединения АТМ. Узел управления радиосвязью RNC1 содержит блок синхронизации 805, который генерирует эталонный сигнал синхронизации СКR, который синхронизирует все другие блоки в узле RNC1. Блок синхронизации 805, в свою очередь, запускается сигналом эталона времени TR от генератора эталонного времени 860, который является приемником GPS или подобным устройством для отметки времени, имеющим достаточную точность. Главный блок синхронизации 810 в узле RNC1 генерирует состояния счетчика кадров системы SFC, которые посылаются через выделенные и отдельные соединения 850, 890 как эталоны номеров кадров к базовым станциям BS1 и BS2. Базовые станции BS1, BS2 каждая включает блок синхронизации 830, 860 для синхронизации всех остальных блоков в базовой станции BS1, BS2 через сигнал синхронизации CK1, CK2. Каждая базовая станция BS1, BS2 также содержит блок синхронизации 835, 865, из которых генерируется первый ряд состояний локального счетчика кадров LFCBS1 и второй ряд состояний локального счетчика кадров LFCBS2 соответственно к блоку приемопередатчика 840, 870.
Чтобы оценить задержку на одном тракте D1, D2, испытываемую пакетами данных DP, когда они пересылаются между центральным узлом RNC1 и базовыми станциями BS1 и BS2, соответственно, сообщение о задержке прохождения сигнала RTD1, RTD2 зацикливается туда и обратно между центральным узлом RNC1 и каждой отдельной базовой станцией BS1, BS2. Величина задержки одного тракта D1, D2 затем вычисляется путем вычитания времени прибытия tа сообщения о задержке прохождения сигнала RTD1, RTD2 из соответствующего времени посылки ts сообщения RTD1, RTD2 и делением результата на два, т.е. D1=(ta1-ts1)/2; D2=(ta2-ts2)/2. Чтобы получить более достоверную оценку задержки одного тракта D1, D2, выполняется р таких вычислений (где, например, р=10), из которых вычисляется среднее значение задержки одного тракта. Естественно, могут быть применены альтернативные способы фильтрации, чтобы оценить задержку одного тракта D1, D2. Сообщение о задержке прохождения сигнала RTD1, RTD2 также может быть объединено с сообщением счетчика кадров системы SFC из центрального узла RNC1 или включено в него.
Сообщение о задержке прохождения сигнала RTD1, RTD2 может исходить либо из базовой станции BS1, BS2, либо из центрального узла RNC1. Если сообщение о задержке прохождения сигнала RTD1, RTD2 поступает от одной из базовых станций BS1, BS2, компенсация задержки одного тракта также выполняется в базовой станции BS1, BS2 путем установки состояния локального счетчика кадров LFCBS1, LFCBS2 согласно состоянию счетчика кадров системы SFC плюс задержка одного тракта D1, D2, т.е. LFCBS1=SFC+D1; LFCBS2=SFC+D2. Если вместо этого сообщение о задержке прохождения сигнала RTD1, RTD2 исходит из центрального узла RNC1, задержка одного тракта D1, D2 компенсируется в этом узле путем переноса вперед по времени передачи каждого сообщения SFC1, SFC2 состояния счетчика кадров системы SFC к каждой соответствующей базовой станции BS1, BS2 на время, равное вычисленной задержке одного тракта D1, D2, т.е. так что SFC1=SFC-D1, SFC2=SFC-D2.
Главный блок управления 815 используется для вычисления величин опережения синхронизации ТА1, ТА2 и величин смещения канала нисходящей линии связи DCО1, DCО2, которые должны быть использованы в базовых станциях BS1, BS2 во время обмена пакетами данных DP в нумерованных кадрах данных в каналах нисходящей линии связи DCH1 (DPs), DCH2 (DPs). Однако главный блок управления 815 также определяет, когда скорректировать активный набор для конкретной подвижной станции либо путем добавления, либо исключения одного или более секторов из активного набора. Блок переключения разнесения 820 обрабатывает обмен информацией во время процедур переключения, а также во время нормального обмена, т.е. посылает и принимает пакеты данных DPs.
В случае обмена речью в реальном времени с подвижной станцией MS2 информация s принимается от центральных частей сети через речевой кодек (кодер/декодер) и посылается к центральным частям сети через тот же речевой кодек. Если осуществляется обмен другими видами данных, информация s либо проходит через альтернативный кодек, либо передается некодированной. Разделенная информация в виде пакетов данных DP подается из блока переключения разнесения 820 через блок коммутации 825 к базовым станциям BS1, BS2, и пакеты данных от базовых станций BS1, BS2 проходят к блоку переключения разнесения 820 через блок коммутации 825 и блок буфера 880. Блок буфера 880 используется при выполнении процедуры разнесения на копиях принятых пакетов данных DP. Блок буфера 880 записывает пакеты данных DP до заданного времени, которое определяется, например, максимально допустимой задержкой в системе, характеристиками каналов АТМ, используемых между узлом управления радиосетью RNC1 и базовыми станциями BS1, BS2. После истечения заданного времени процедура разнесения выполняется на доступных в настоящее время копиях конкретных пакетов данных DP. Блок переключения разнесения 820 также принимает величины смещения кадров Of12, которые включены в пакеты данных DP и подаются от подвижной станции MS2 через одну из базовых станций BS1. Величины смещения кадров Of12 проходят к главному блоку управления 815 как входной сигнал для вычисления величин опережения синхронизации ТА2.
Блок приемопередатчика 840, 870 в базовой станции BS1, BS2 принимает пакеты данных DPs от подвижной станции MS2 на канале восходящей линии связи UCH1 (DPs); UCH2 (DPs) и передает пакеты данных DPs к подвижной станции MS2 на канале нисходящей линии связи DCH1; DCH2. Пакеты данных DPs посылаются к узлу управления радиосетью RNC1 через блок коммутации 825, и пакеты данных DPs принимаются от узла управления радиосетью RNC1 через блок коммутации 825 и блок буфера 855, 875. Блок буфера 855, 875 записывает пакеты данных DPs до тех пор, пока пакет данных DP сможет быть послан к подвижной станции MS2 от первой BS1 и второй BS2 базовой станции на канале нисходящей линии связи DCH1, DCH2 в кадре данных, имеющем номер кадра, указанный узлом управления радиосетью RNC1. Пакет данных DP, который поступает слишком поздно к конкретной базовой станции BS1, BS2, чтобы удовлетворить этому требованию, отбрасывается. Кроме того, блок приемопередатчика 840, 870 измеряет смещение общего канала управления нисходящей линии связи ССО1, ССО2 между состоянием его локального счетчика кадров LFCBS1, LFCBS2 и его общим каналом управления нисходящей линии связи CDCH1, CDCH2. Результаты измерений подаются к главному блоку управления 815 в центральном узле RNC1 через блок синхронизации 835, 865 и блок коммутации 825.
Блок управления синхронизацией 845; 885 в каждой базовой станции BS1; BS2 принимает величину опережения синхронизации ТА1; ТА2 и величину смещения канала нисходящей линии связи DCО1; DCО2 от главного блока управления 815 в центральном узле RNC1 через блок коммутации 825. Блок управления синхронизацией 845; 885 регулирует работу блока приемопередатчика 840; 870 через сигнал управления I1, I2, так что каждый пакет данных DP, принятый и переданный через радиоинтерфейс, связан с правильным номером кадра.
Это изобретение в первую очередь предназначено для использования в системе сотовой радиосвязи МДКР, но заявленные способ и устройство, конечно, применимы в любом типе системы сотовой радиосвязи, независимо от того, как разделены ресурсы радиосвязи между отдельными пользователями системы. Общие каналы управления нисходящей линии связи, каналы нисходящей линии связи и каналы восходящей линии связи могут быть здесь разделены один от другого путем кодового разделения, комбинации кодового и частотного разделения, комбинации кодового и временного разделения и комбинации кодового, частотного и временного разделения радиоспектра.

Изобретение относится к устройству для радиосвязи, в частности к способу и устройству для осуществления способа синхронизации связи разделенных на кадры данных через асинхронные базовые станции в системе сотовой связи. Техническим результатом является минимизация ошибки синхронизации между кадрами информации, которые посылаются к отдельной подвижной станции от двух или более асинхронных базовых станций или секторов, минимизация потребности буферизации в асинхронных базовых станциях при приеме кадров информации, а также минимизация среднего значения задержки прохождения сигнала туда и обратно, возникающей в системе связи МДКР в системах сотовой радиосвязи. Технический результат достигается путем генерации определенных состояний счетчика кадров системы в центральном узле в системе - узле управления радиосетью, присоединенном к одной или более базовым станциям, причем текущая выборка состояния счетчика кадров системы регулярно посылается из узла управления к присоединенным к нему базовым станциям для синхронизации каждого локального счетчика кадров с состоянием счетчика кадров системы, которая действует в качестве эталона нумерации кадров в системе сотовой радиосвязи. 2 с. и 28 з. п.ф-лы, 8 ил.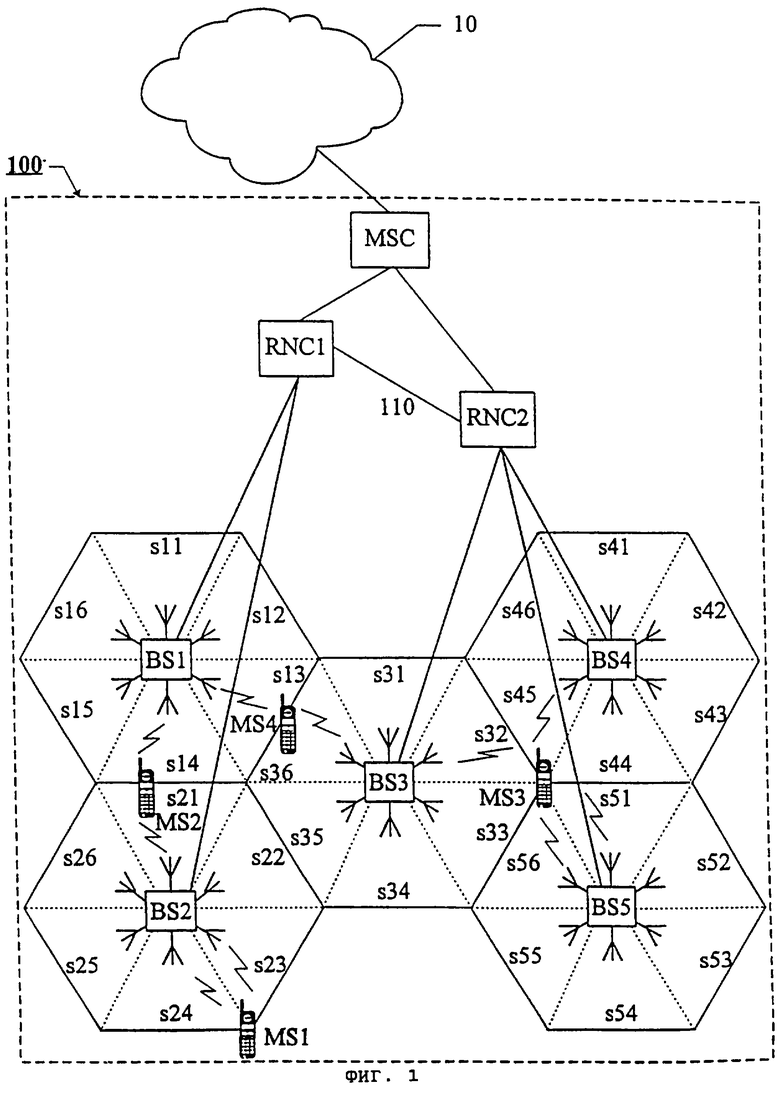
LFCBSX=SFC+Dx,
где LFCBSX обозначает соответствующие состояния LFCBS1 или LFCBS2 локальных счетчиков кадров, разрешающая способность которых равна части импульса сигнала времени (предпочтительно, импульс сигнала времени/10);
SFC обозначает состояние счетчика кадров;
Dx обозначает задержку D1 или D2 на прохождение сигнала в одном направлении.
SFCx=SFC-Dx,
где SFCx обозначает сообщение счетчика кадров, посланное к конкретной базовой станции (X=1:BS1, Х=2:BS2);
SFC обозначает состояние счетчика кадров;
Dx обозначает задержку D1 или D2 на прохождение сигнала в одном направлении.
TA2=Tf-Of12,
где ТА2 обозначает величину опережения синхронизации;
Tf обозначает длительность кадра (DF) данных;
Of12 обозначает величину смещения кадра, и
DCO2=ССO2+ТА2+i•Tf,
где DCO2 обозначает смещение канала нисходящей линии связи для второго канала (DCH2) нисходящей линии связи, т.е. как нумеруют (t2(1)-t2(4)) кадры (DF) данных второго канала (DCH2) нисходящей линии связи относительно состояний (LFCBS2(n)) локального счетчика кадров во втором секторе (s21);
ССO2 обозначает величину смещения общего канала управления нисходящей линии связи между вторым рядом состояний (LFCBS2(n)) локального счетчика кадров и общим каналом (CDCH2) управления нисходящей линии связи;
ТА2 обозначает величину опережения синхронизации;
i есть целая величина, которая установлена в значение, которое минимизирует модуль разности (|DCO1-DCO2|min) между номером (t1) кадра, заданным смещением (DCO1) первого канала нисходящей линии связи и номером (t2) кадра, заданным смещением (DCO2) второго канала нисходящей линии связи;
Tf обозначает длительность кадра (DF) данных.
DCO1=CCO1+TA1,
где ССO1 есть последняя величина смещения общего канала управления нисходящей линии связи между первым рядом состояний (LFCBS2(n)) локального счетчика кадров и первым общим каналом (CDCH1) управления нисходящей линии связи, сообщенная от первой базовой станции (BS1) центральному узлу (RNC1);
ТА1 равно величине опережения синхронизации для первого канала (DCH1) нисходящей линии связи.
| Паровая коробка турбины с двухседельными регулирующими клапанами | 1972 |
|
SU437835A1 |
| WO 9430024 A1, 22.12.1994 | |||
| СПОСОБ ЛЕЧЕНИЯ ПСОРИАЗА | 2005 |
|
RU2290926C1 |
| Способ получения замещенных норациметадолкарбамата | 1973 |
|
SU474138A3 |
| RU 94009148 A1, 27.10.1995 | |||
| RU 94013065 A1, 27.12.1995. | |||
