Изобретение относится к устройству и способу для бесконтактного распознавания границ обработки или соответствующих задающих величин.
Уровень техники
Подобное устройство известно из заявки ФРГ 2455836. Описанное в этой заявке устройство включает в себя приемопередающий аппарат, который определяет местоположение границы подлежащей сбору продукции спереди по направлению движения, а по отношению к растительности - под острым углом наклона к земле и немного назад. Далее по отражению с помощью различных способов обработки генерируется управляющий сигнал. Передающее устройство работает с узкополосными лучами света, поляризаторами и модуляторами, коротковолновыми плотными пучками электромагнитных волн или звуковых волн. Отражаемые сигналы обрабатываются путем сравнения по заданному параметру волны, и автоматическое устройство управления движением по курсу обеспечивает, чтобы поперечное расстояние между границей режущего аппарата и границей собираемой растительности было минимальным. Для достижения еще лучшей идентификации границы устройство периодически поворачивают вокруг вертикальной оси, и по средней величине принимаемых сигналов генерируется положение границы по отношению к заданной величине.
Недостатки этого устройства обусловлены установкой аппарата на машине и обработкой сигналов датчика. Описанное решение устройства подходит для распознавания границы растительности только условно. В нем считывающий (сканирующий) луч отражается от границы растительности сбоку, и по принимаемому сигналу определяется удаление от границы. Из-за неровностей земли или пониженной высоты растительности может случаться, что устройство передает данные об удалении от земли или работает над растительностью. Кроме того, оно требует тонкой регулировки и точного выдерживания точки считывания на границе. Это можно реализовать только при высоких затратах. Далее, такие переменные величины как высота растительности, высота обработки, изменения наклонов машины и поверхности, вместе взятые и по отдельности, оказывают сильное влияние на принимаемый сигнал.
Если же выбирают другие известные способы обработки данных или, как было предложено, передающее устройство поворачивают вокруг вертикальной оси, то устройство удовлетворительно работает только тогда, когда угол отражения постоянно находится на границе растительности. Однако практика показывает, что такие оптимальные рабочие условия создаются редко, поэтому качество работы устройства остается низким.
При использовании устройства на какой-либо другой границе или границе обработки, когда по обеим сторонам от границы условия отражения одинаковы, как, например, для проведенной плугом борозды, качество измерения удаления снижается тем, что может быть реализован только двухточечный контур регулирования. Однако известно, что это приводит к недостаточному качеству работы. В этом случае даже поворот передающего устройства вокруг вертикальной оси не улучшает идентификации. Независимо от выбранного способа обработки данных средняя величина по полосе движения зависит от угла отражения и ширины полосы движения и не дает никакой расшифровки положения полосы относительно рабочего агрегата. Таким образом, устройство и способ обработки данных весьма ограниченно пригодны для распознавания границы обработки.
Далее, в патенте ФРГ 19508942 описано устройство автоматического управления движением машины, в котором локационное устройство выступает вверх над зерновой культурой и расположено таким образом, что локационные сигналы проходят примерно перпендикулярно ножу режущего аппарата сверху вниз косо к границе обработки.
Известны различные локационные сигналы, при этом от одного локационного устройства охватывается необработанный и обработанный участки поля. Это осуществляется с помощью ультразвукового лепестка или лазерного сканера. В простейшем исполнении двухточечный контур регулирования реализуется посредством использования двух лазерных лучей локации.
Серьезный недостаток этих локационных устройств заложен в обработке принимаемых сигналов. Лазерный сканер применим только для распознавания границы или полосы, имеющих высотный профиль. В современных условиях система непригодна для локации при работе с зерновыми культурами. Кроме того, необходимо применение средств, которые позволяли бы выдерживать примерно постоянную дальность считывания, чтобы не допускать превышения максимальной ширины рабочей области лазерных лучей.
При применении ультразвукового локационного устройства описываемые методы обработки данных зависят от качества эталонных величин для сравнения. Для обработки данных и генерирования управляющих сигналов для автоматического управления движением отраженные сигналы должны поддаваться оценке в сравнении с эталонной величиной. Однако практика показывает, что как раз эти эталонные величины не являются постоянными и должны подвергаться изменениям по длине границы. Вследствие этого локационное устройство работает только по отрезкам с высокими потребностями корректировки для удовлетворительного распознавания границы. Устройство непригодно для распознавания границ обработки других типов.
В патенте ФРГ 19508941 раскрыто еще одно локационное устройство, в котором на сельскохозяйственной машине установлены три устройства частичной локации; первое из них направлено на обработанное поле, с которого собран урожай, второе - на необработанное поле и третье - на кромку убираемой растительности. Эталонные величины сравнения для третьего частичного локационного устройства выводятся из средней величины сигналов первого и второго частичных локационных устройств.
Здесь также имеется тот недостаток, что отраженные сигналы частичной локации подвержены сильным изменениям, и невозможно удовлетворительное следование вдоль границы.
На отраженные сигналы частичной локации оказывают воздействие плотность растительности, дальность считывания и высота растительности или стерни. Однако необходимость интегрирования и вычисления средних величин по многим замерам делает невозможным реагирование на быстрое изменение отраженных сигналов, которые могут поступать даже навстречу друг другу, чтобы давать возможность надежного распознавания и следования вдоль границы. Кроме того, тройное исполнение локационного устройства требует высоких затрат и особой синхронизации посылаемых сигналов.
Для локации валков собранной продукции данное устройство непригодно. Передаваемые от наружных устройств частичной локации эталонные сигналы не дают необходимых для этого эталонных величин. Среднее устройство частичной локации должно быть точно установлено над валком таким образом, чтобы центр лепестка диаграммы направленности антенны лежал посредине валка. Это исполнение хотя и возможно, однако над серединой валка устройством не может быть генерирован сигнал положения границы. Изменение отраженных сигналов среднего устройства частичной локации происходит только после того, как лепесток отойдет от валка собранной продукции.
Для распознавания плужной борозды устройство частичной локации должно определять эталонные величины дна борозды. Однако это невозможно при ширине диаграммы направленности ультразвуковой локации.
Из патента ГДР 264366 известно еще одно бесконтактное локационное устройство, которое расположено над границей и преобразует отраженное оптическое излучение в электрические сигналы позиции. Временно записанные в память величины далее оцениваются в информационной системе по шкалам серых и цветных тонов и преобразуются в сигнал управления движением по курсу.
Оптическая система с обработкой данных такого типа имеет принципиальный недостаток в том, что при различных направлениях освещения появляются тени, которые с трудом можно отличить от границы. Далее, на контур управления движением по курсу отрицательно воздействует низкая скорость опережения такой системы.
Устройство непригодно для распознавания различных кромок и границ обработки. Во многих случаях цветовая разница между обработанным и необработанным участком поля очень невелика. Далее, точность устройства определяется числом и величиной приемных элементов, а получение достаточной разрешающей способности связано с высокой стоимостью.
Еще одно устройство известно из патента ФРГ 19726917. В патенте описано сканирующее устройство для распознавания контуров, простирающихся по земле. Смонтированный на уборочной машине лазерный сканер считывает контур посредством измерения удаления. На контуре обнаруживаются точки скачков удаления и привязываются к углам сканирования. В точке наибольшего скачка величины удаления с ее привязкой к углу сканирования передается сигнал разности курса и выполняется автоматический рулевой поворот.
Для использования устройства при движении вдоль валка из измеренных величин в качестве ведущей выбирается величина наименьшего удаления. Однако указанное устройство пригодно только для распознавания границ обработки, которые имеют изменения высотного профиля. Оно непригодно для распознавания границ обработки, которые не имеют таких изменений, например границ зерновых культур или границ обработки почвы.
Сущность изобретения
Задачей, на решение которой направлено изобретение, является создание устройства и способа, которые среди различных контуров обеспечивают надежное распознавание границы обработки, по которой в дальнейшем должна стать ясной граница между обработанной и примыкающей к ней необработанной площади обработки, такая как, например, граница зерновой растительности, граница стерни/свежевспаханной земли, собираемой созревшей растительности/луговой дернины или граница жатвы, или же получение задающих величин, по которым в дальнейшем должна стать ясной полоса, отличающаяся от окружающего профиля поля возвышением, например валок, или понижением, например борозда.
Решение поставленной задачи достигается тем, что предусмотрены средства, которые по отражению излучаемых электромагнитных волн генерируют по меньшей мере одну специфическую величину (характеристику) границы обработки.
По отражению посылаемых лучей в качестве специфической величины (характеристики) границы обработки генерируется интенсивность или соответственно сдвиг по фазе. На основе этой численной обработки (численного анализа) отражения можно также надежно распознавать границы обработки или задающие величины, которые имеют малые изменения или вообще не имеют изменений по высоте.
Скачки величин удаления вызываются разностью высот в контуре. Скачок специфической величины границы обработки, под которой подразумевается, например, интенсивность или соответственно сдвиг по фазе, в большинстве случаев вызывается разницей во влажности или соответственно разницей в структуре почвы между обработанным и необработанным участками поля. При обработке участков поля на границе обработки возникает, как правило, по меньшей мере одно изменение в одной из измеряемых величин.
Таким образом, измерения показывают, что электромагнитные волны, отраженные от обработанного участка, такого как, например, стерня после жатвы, луговая дернина или свежевспаханная земля, и от необработанного участка, отличаются друг от друга. Дополнительное определение специфической величины границы обработки дает огромное преимущество по сравнению с простым измерением величин удаления, поскольку при определении границы обработки или задающей ее величины по большому числу измеряемых величин в распоряжение получают по меньшей мере одну информацию для выявления границы обработки или задающей величины.
Устройство в соответствии с изобретением, предназначенное для распознавания границ обработки или задающих величин, является универсальным и может быть применимо для распознавания различных границ обработки и задающих величин.
Излучаемая передающим устройством электромагнитная волна при падении на объект отражается от него. Эта отраженная волна содержит различную информацию об объекте, который ее отражает. Во-первых, по времени прохождения сигналов можно вычислить удаление точки измерения, и во-вторых, можно вычислить интенсивность отраженной волны или сдвиг по фазе. В соответствии с изобретением эту информацию отраженной волны подвергают анализу, например численной обработке, и используют для распознавания границ обработки или задающих величин.
Более простое решение устройства достигается при матричной конструкции приемного устройства. Электромагнитные волны, излучаемые по меньшей мере одним инфракрасным или световым излучателем, отражаются от точки измерения и воспринимаются множеством приемных элементов, расположенных рядом друг с другом горизонтальными рядами. Приемные элементы связаны между собой таким образом, что по отдельным измеренным величинам могут быть рассчитаны положение границ обработки или задающие их величины относительно рабочих агрегатов. Точность указанного устройства определяется расположением приемных элементов. При этом для получения лучшей разрешающей способности целесообразно скомпоновать приемные элементы в одном корпусе.
Уменьшение числа приемных элементов в устройстве достигается при применении сканирующего устройства. При этом посылаемый луч совершает сканирующий поворот на угол до 180o вокруг практически вертикальной оси. При этом наиболее рационально выбрать такое устройство, чтобы посылаемый луч в середине рабочей области углового диапазона проходил по оси, параллельной продольной оси машины. Тогда приемное устройство регулируется синхронно с посылаемым лучом или приспосабливается для приема луча с помощью соответствующих средств, например с помощью активной поворотной оптики или оптической линзы.
Как правило стараются выдерживать прямолинейные границы обработки. В этих случаях границы обработки или задающие величины всегда подлежат обнаружению в пределах узких рабочих областей углового диапазона устройства. Поэтому в предпочтительном варианте осуществления рабочая область углового диапазона ограничивается несколькими градусами, например ±6o от середины рабочей области углового диапазона. Дальнейшее преимущество такого решения состоит в том, что устройство может работать с высокой частотой сканирования, за счет чего улучшается разрешающая способность распознавания следующих друг за другом контуров.
Область применения устройства охватывает различные рабочие агрегаты или уборочные машины с различными траекториями движения при обработке. В связи с этим в устройстве заложены различные методы анализа для определения границ обработки или задающих величин. Оператор устройства выбирает желаемый режим применения устройства с помощью ручного устройства ввода, например клавиатуры, поворотного или кнопочного включателя. Тогда в устройстве выбирается соответствующий метод анализа, например численной обработки. Таким же образом оператор устройства может с помощью известных средств сообщить о необходимости нового автоматического выбора метода численной обработки.
В дальнейшем исполнении изобретения предусмотрено, что выбор метода численной обработки выбирается циклически или автоматически на основе величины, зависящей от процесса обработки. Так, например, можно запускать в действие процесс выбора метода численной обработки при опускании режущего аппарата или при включении вала отбора мощности.
В простейшем случае применения устройство определяет положение границ обработки или задающих величин по отношению к месту установки устройства на машине. Устройство устанавливают на сельскохозяйственном агрегате или уборочной машине таким образом, что посылаемый луч считывает задающую линию или кромку обработки перед рабочим агрегатом. Оптимальная установка достигается при выравнивании середины области измерений параллельно направлению движения. Середина рабочей области выбирается как правило в качестве заданного ведущего направления. Отсюда следует, что наилучшее место установки устройства находится прямо перпендикулярно над границей обработки или задающей величиной. Благодаря этому скачок удаления или скачок специфической величины границы обработки в области заданного направления распознается наилучшим образом. Далее, отклонения от заданного направления в обе стороны распознаются в одинаковом масштабе.
В некоторых случаях применения, например в рабочих агрегатах с большой шириной захвата и сменными рабочими аппаратами, такое оптимальное расположение устройства не всегда возможно. Установка устройства на длинных консольных штангах с обеспечением приближенного и устойчивого расположения над границей обработки или задающей величиной потребовала бы больших затрат в конструктивном отношении. В этих случаях устройство устанавливают на рабочем агрегате или тягаче на расстоянии от границы обработки или задающей величины. При этом середина рабочей области устройства и кромка обработки или ведущая борозда отстоят друг от друга при параллельном выравнивании посылаемых лучей. Для того, чтобы рабочий агрегат мог следовать вдоль кромки обработки или задающей величины с определенным расстоянием от нее, вычисляемое положение границы обработки должно быть откорректировано на величину смещения и только затем передано для автоматического управления движением.
При работе на склонах известен прием установки тягачей и рабочих агрегатов с небольшим поворотом поперечно склону для компенсации приводного усилия отбора мощности на склоне. Для этого рабочие агрегаты поворачиваются вокруг своего центра тяжести без изменения направления движения. При этом все отстоящие от центра тяжести части машины изменяют свое положение относительно направления движения. Как правило, устройство распознавания границы установлено на расстоянии от центра тяжести машины, и в этом случае середина рабочей области устройства уже оказывается смещенной непараллельно направлению движения. Устройство определяет величину рассогласования. Это рассогласование компенсируют коррекцией заданной величины положения и соответственно действительного положения путем вводимого вручную смещения.
В другом варианте осуществления изобретения предусмотрены средства для соответствующей компенсации рассогласования, которое вызывается изменениями установочного положения устройства. Так, предусмотрены средства для ручного или автоматического изменения установочного положения и/или наклона устройства. С помощью известных средств, таких как, например, установочный двигатель, установочное положение или наклон устройства могут быть изменены таким образом, чтобы скомпенсировать рассогласование.
Далее, необходимо изменять установочное положение устройства непосредственно на рабочих агрегатах с различными параметрами рабочей высоты или глубины. Для того, чтобы сохранить обзорность для устройства или по меньшей мере не допустить выхода считывающего луча за пределы рабочей зоны обрабатываемой площади, может быть необходимо корректировать высоту установки или наклон устройства. Это может осуществляться либо автоматически, посредством управления на основе измерения рабочей высоты или глубины, либо ручной регулировкой.
При применении устройства на почвообрабатывающих рабочих агрегатах изменение горизонтального положения целесообразно в тех случаях, когда желательно перекрытие предшествующей полосы обработки с переменной величиной перекрытия. Для этого устройство смещают, например, с помощью установочного двигателя, ближе к центру тягача. При этом изменяется заданная задающая величина, и производится автоматическое управление движением таким образом, чтобы машина с измененной относительной заданной задающей величиной шла вдоль границы обработки или задающей величины.
В еще одном варианте осуществления изобретения предусмотрено вовлечение устройства в программу процесса обработки начала или конца площади. Из полученных с помощью устройства линий прохождения границы обработки или задающих величин выводят линию начала или окончания и передают сигнал на соответствующие автоматические средства с помощью известных средств коммуникации. При распознавании устройством границы обработки или задающей величины активизируется автоматическая система начала обработки. Водителю передается соответствующее сообщение, и после некоторой выдержки времени или некоторого пути движения автоматическая система включается. Так, например, опускается рабочий аппарат или включается вал отбора мощности.
В еще одном варианте осуществления изобретения предусмотрена запись в запоминающее устройство отдельных измеренных величин вместе с относительными или абсолютными параметрами положения. Имеющиеся современные высокоточные локационные системы - глобальные спутниковые системы определения местоположения - позволяют производить запись в памяти любых измеренных величин отражения вместе с величинами корректировки установочного положения и абсолютными координатами (X, Y, а при необходимости и Z). В упрощенном виде достаточно вводить в запоминающее устройство измеренные величины в сочетании с относительными величинами, например углом сканирования луча или, при матричном расположении приемных элементов, - с номером приемного элемента. Соединение устройства с электронными средствами численной обработки, с автоматическим регулятором управления движением по курсу или средствами управления началом или окончанием рабочего процесса обработки может осуществляться посредством известной системы CAN-Bus.
Согласно изобретению предложен также способ распознавания границ обработки или задающих величин, содержащий следующие этапы:
- излучение электромагнитной волны;
- прием отраженной электромагнитной волны и ее анализ, например, путем численной обработки для получения величины удаления или соответственно по меньшей мере одной специфической величины границы обработки;
- запись в память отдельных измеренных величин;
- вычисление отдельных контуров по ширине рабочего диапазона устройства по отдельным измеренным величинам;
- анализ измеренных величин по ширине рабочего диапазона устройства по выбранному методу численной обработки;
- генерирование действительной положения границы обработки или задающей величины;
- сравнение действительного положения с заданным положением для получения рассогласования и генерирование управляющего воздействия для автоматического направления по курсу.
Излученная электромагнитная волна отражается от точки профиля и принимается устройством. По принятому сигналу вычисляют и записывают в память удаление и по меньшей мере одну величину, специфическую для границы обработки.
Из отдельных измеренных величин выбирают величины, лежащие в области ширины рабочего диапазона устройства, и по ним вычисляют профиль. Эти отдельные профили при необходимости могут быть вновь временно записаны в память. На основе выбранного метода численной обработки анализируют отдельные профили или ряды измеренных величин и направляют положение границы обработки или задающие величины. На основании сравнения заданного положения с вычисленным действительным положением вычисляют рассогласование и величину регулирования для включаемой далее автоматической системы управления движением по курсу. Способ надежно определяет кромку обработки или задающую величину и позволяет надежно направлять рабочий агрегат вдоль границы обработки или по задающей величине.
В еще одном примере осуществления способа предусмотрено, что при численной обработке измеренных величин не используют никакой абсолютной эталонной величины, а вместо этого в качестве эталонной величины выбирают одну из величин измерения и используют ее для относительной численной обработки. При приведении измеренных величин принимают, например, наименьшее удаление за единицу и наибольшее удаление за ноль. За счет такого приведения все высотные изменения профиля в области скачка нормируют от 0 до 1. Фактическая величина скачка уже не играет никакой роли, и вся последующая численная обработка не требует никакого приведения. При таком приведении устраняются изменения удаления вследствие движения машины по уклонам, например в гору или под гору.
Другой вид приведения может использоваться, например, для приведения специфических величин границы обработки. Здесь в качестве эталонной величины принимают численную величину при определенном угле сканирования. Так, например, приведение измеренных величин по ширине рабочего диапазона устройства можно провести по крайней левой измеренной величине. При уборке урожая с поля зерновых в направлении по часовой стрелке это означало бы, что все измеренные величины приводятся относительно измеренной величины, которая выведена из отражения электромагнитной волны от сжатого участка поля. Благодаря указанному способу устраняются колебания, например, специфической величины границы обработки по длине границы обработки.
Если в эталонной величине появляются резкие нереальные колебания, то предусмотрена проверка их достоверности и, при необходимости, отказ от нее и замена прежней установленной эталонной величиной.
Область применения устройства распространяется на различные границы обработки или задающие величины. Для этого устройство должно содержать различные методы численной обработки. Как уже упоминалось, эти методы могут выбираться вручную или автоматически. Для автоматического выбора метода численной обработки измеренные величины подвергаются анализу в соответствии с определенным порядком. В качестве примера далее приведен метод выбора.
Вначале среди измеренных величин в области ширины рабочего диапазона устройства выбирают и запоминают только наибольшую или наименьшую измеренную величину и вместе с ее относительным и абсолютным положением. Далее среди измеренных величин в области ширины рабочего диапазона устройства выявляют наибольший скачок величины и его относительное положение. При этом в еще одном дальнейшем исполнении способа поиск производится только среди скачков с определенным знаком.
Если метод селекции обнаруживает среди измеренных величин удаления только в одной области максимальную или минимальную величину, - значит это относится к границе обработки или задающей величине с углублением или повышением в профиле. Из этого может следовать, что здесь проходит борозда, полоса разметки или валок. Если на ширине рабочего диапазона устройства выявляется только одна область с минимальной величиной, то речь идет о распознанной границе обработки или задающей величине с возвышением над землей, - например о валке. Если на ширине рабочего диапазона устройства выявляется только одна область с максимальной величиной, то речь идет о распознанной границе обработки или задающей величине с углублением в земле, например о полосе разметки или борозде. Далее положение наибольшей измеренной величины сравнивают с положением наибольшего скачка измеренной величины, возможно с выбранным знаком скачка. Если они расположены рядом, то речь идет о борозде.
Если же в пределах ширины рабочего диапазона устройства не выявлено измеренных величин минимального или максимального значения, но выявлен скачок удаления, то речь идет о границе обработки.
Если анализ величин удаления не дает однозначного положения границы обработки или задающей величины, то численная обработка специфических величин границы обработки предоставляет дополнительное средство селекции. На следующем этапе способа исследуются специфические величины границы обработки на определение минимальной или максимальной величин и мест скачков с определением их знака в пределах ширины рабочего диапазона устройства. При нахождении таких мест их сравнивают с критериями предыдущих методов селекции.
Если на ширине рабочего диапазона устройства выявляется только одна область с минимальной или максимальной величиной, то на этом месте имеется изменение структуры поверхности и/или изменение влажности. Значит, на этом месте проходит, например, полоса разметки, или борозда, или валок. Если привлечь к анализу критерии различия из измерений удаления, можно сделать однозначный выбор на основе метода численной обработки.
Если же на ширине рабочего диапазона устройства не выявляется ни минимальной, ни максимальной величины, но обнаружен скачок величины, то на этом месте проходит граница обработки, например граница жатвы или граница между посевами и луговой дерниной. В случае, когда по измерениям удаления на этом месте также имеется скачок, на этом месте проходит граница обработки в виде разделительной границы, например границы жатвы, или борозда. Если же по измерениям удаления на этом месте нет никакого скачка, - значит, на границе обработке нет высотного перепада профиля.
Критерии, которые используются для выбора метода анализа, применяются также и для распознавания действительного положения или задающей величины. На основе выбранного метода численной обработки действительное положение известной границы обработки или задающей величины может быть выведено уже из анализа измеренных величин. Так, например, с помощью метода численной обработки для распознания границы обработки граница может быть вычислена уже по месту скачка в измеренных величинах удаления. Этот результат, как правило, подтверждается в дальнейшем скачком специфической величины границы обработки. Если из измеренных величин не выявляется действительное положение, тогда привлекаются другие критерии, заложенные в методе численной обработки.
Один из вариантов осуществления способа предусматривает ситуацию, когда по нескольким видам анализа измеренных величин получают несколько действительных положений; в этом случае результат выбирают на основании сравнения, относительного просчета или анализа вероятности результата.
Для получения еще более высокой надежности предусмотрено также сравнение предыдущего действительного положения с текущим результатом и при необходимости проведения корректировки. Большие преимущества дает определение прохождения границы обработки на основе нескольких записанных в памяти контуров в области ширины рабочего диапазона устройства. Они позволяют также прогнозировать возможное положение линии границы.
В дальнейшем варианте осуществления способа по изобретению по измеренным величинам получают границу окончания или начала обработки или их задающие величины.
В том случае, когда метод численной обработки больше не определяет никакого действительного положения границы обработки или задающей величины, это означает, что рабочий агрегат дошел до конца обрабатываемого поля. За счет переднего обзора устройства конец поля распознается еще до подхода рабочего агрегата. Поскольку поле нужно обработать до самого конца, система автоматического управления движением продолжает работать по прежнему сигналу управления. Далее, по истечении промежутка времени или после прохода определенной дистанции или по установочному сигналу активизации (например, повороту руля) на конечном этапе обработки включается автоматическая система окончания обработки. Для устранения возможных ошибок в распознавании конца поля водителю передается сообщение об распознании конца поля, и он может выключить автоматическую систему окончания обработки до подхода к концу поля. Автоматическая система окончания обработки автоматически приводит в действие различные функции машины. Так, например, может быть поднят режущий аппарат и через некоторое время отключен отбор мощности.
В том случае, когда устройство распознает наличие границы обработки или задающей величины в соответствии с выбранным методом численной обработки, включается система автоматического начала обработки. Водителю машины поступает соответствующее сообщение. За счет переднего обзора устройства граница обработки или задающая величина распознается еще до подхода рабочего агрегата к началу поля. До достижения машиной начала поля система автоматического начала обработки может произвести ряд установочных действий. Водитель машины может также отключить автоматическую систему на это время. Для своевременного начала рабочего прохода могут потребоваться управляющие действия в функции времени, пути или функциональных движений.
Вырабатываемое на основе измеренных величин действительное положение границы обработки или задающая величина используются далее для автоматического управления движением рабочего агрегата или уборочной машины по курсу вдоль границы обработки или задающей величины. Посредством дальнейшего способа действительное положение, заданное положение или величина рассогласования могут корректироваться путем ввода поправок. Это необходимо для того, чтобы устранить влияние на расчетное действительное положение таких факторов как движение рабочего агрегата по уклону, место установки устройства, изменения ширины полосы обработки. В способе предусмотрена возможность ввода поправок вручную или автоматическим вводом параметров регулирования для учета при автоматическом направлении движения по курсу.
Как правило интенсивность отражения уменьшается с увеличением удаления. При увеличении влажности интенсивность отражения увеличивается. Поэтому интенсивность отражения от свежеобработанного участка или свежей борозды или полосы разметки будет выше, чем от окружающего необработанного участка. На границах обработки, для которых специфическая величина границы и удаление пропорциональны друг другу, таких как полоса разметки, установочное положение устройства в соответствии со способом регулируется таким образом, что при изменениях положения или наклона устройства по меньшей мере одна из расчетных измеренных величин остается приблизительно постоянной. За счет этого определяющий границу критерий усиливается настолько, что обеспечивает распознавание границы обработки или задающей величины.
В дальнейшем варианте осуществления способа определяемые величины удаления и относящиеся к ним специфические величины границы обработки увязываются с данными абсолютного или относительного положения и записываются в память вместе с ними. С помощью этого способа имеется возможность представлять на карте границы обработки и задающие величины, по которым производится обработка поля. На основе этой разметки могут быть определены фактическая ширина захвата рабочих агрегатов, действительное прохождение границ участков или задающие величины для последующих рабочих проходов.
Для специалиста в данной области будут понятны дальнейшие возможные варианты осуществления изобретения без дополнительных разъяснении.
Перечень фигур чертежей
Далее изобретение поясняется на примерах осуществления со ссылками на чертежи, на которых:
фиг. 1 изображает диаграмму измеренных специфических величин границы обработки в перпендикулярном направлении к проведенной плугом борозде;
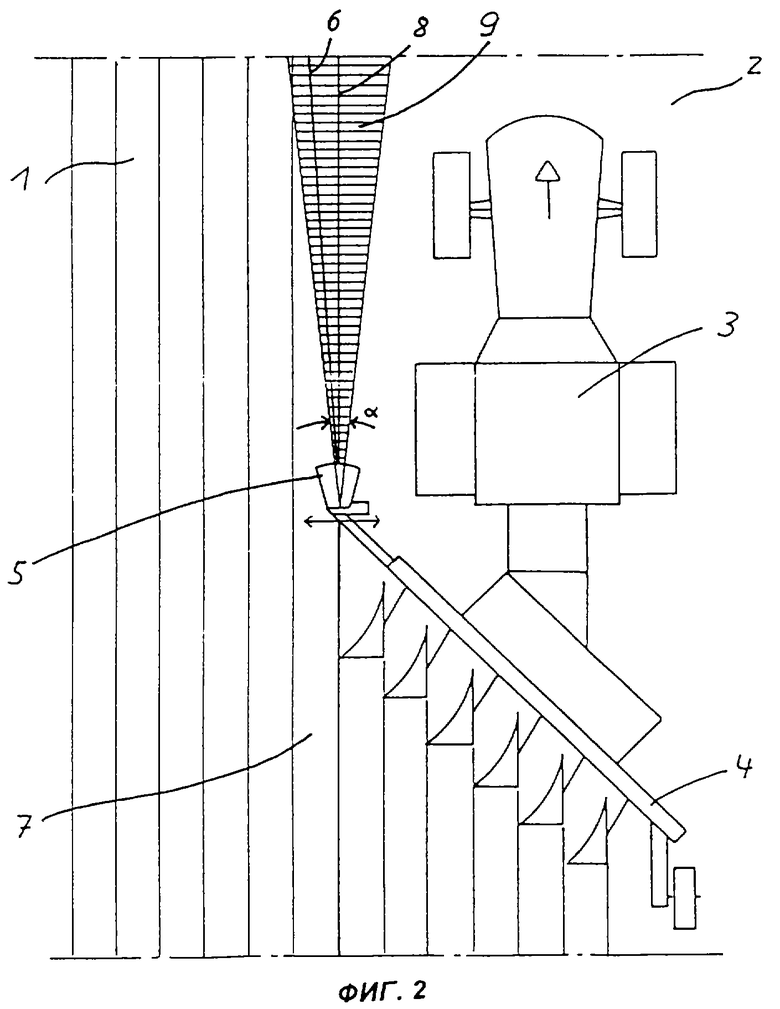
фиг. 2 изображает на виде сверху сельскохозяйственный тягач с навесным плугом в процессе вспашки и расположенное над плужной бороздой устройство по изобретению;
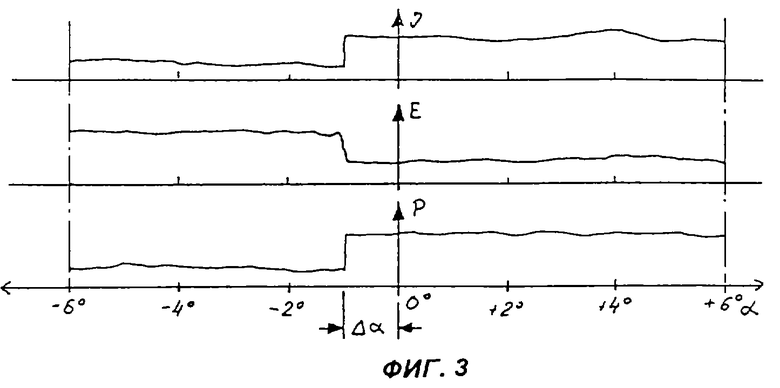
фиг. 3 изображает диаграмму измеренных специфических величин границы обработки в перпендикулярном направлении к границе жатвы;
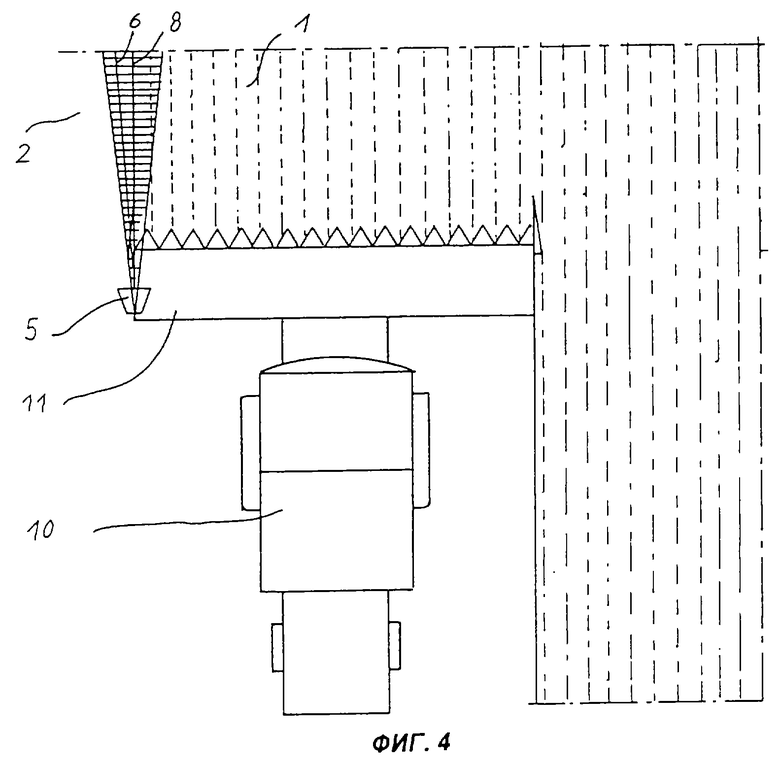
фиг. 4 изображает на виде сверху сельскохозяйственную уборочную машину с навесным режущим аппаратом и расположенное над границей жатвы устройство по изобретению;
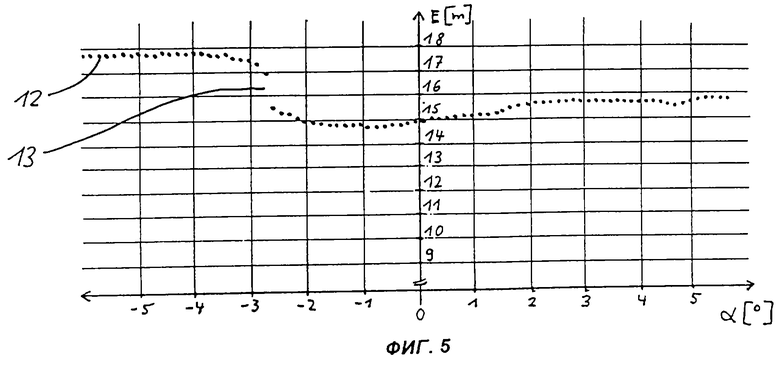
фиг. 5 изображает диаграмму измеренных устройством величин в виде отдельных точек на границе зерновой растительности с их распределением по углам поворота;
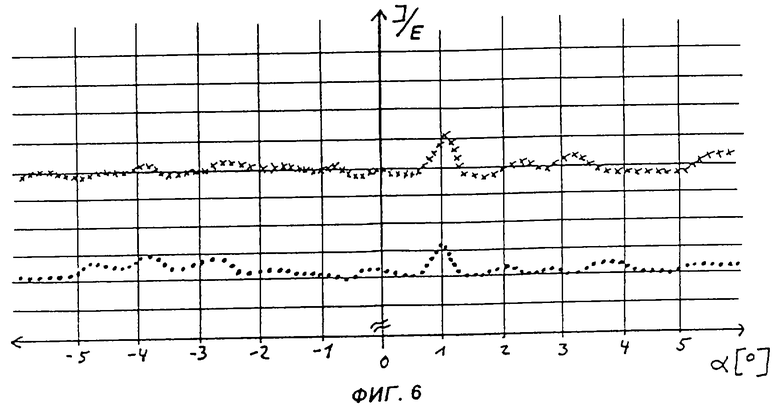
фиг. 6 изображает полученные устройством результаты различных измерений на полосе разметки с их распределением по углам поворота по ширине в рабочем диапазоне устройства.
Примеры осуществления изобретения
Фиг. 1 изображает диаграммы измеренных специфических величин границы обработки на плужной борозде. Как представлено на фиг.2, устройство 5 по изобретению установлено над бороздой на рабочем агрегате, в данном случае на плуге 4. Устройство 5 работает с лазерным лучом, который периодически поворачивается на угол α=±6o к направлению движения. Нижняя линия диаграммы на фиг. 1 представляет контур борозды (ось ординат обозначена Р). В области от -6o до -2o видно сечение обработанного участка 1 поля. От -2o до 0o показано углубление в профиле поля за счет борозды. Примыкающая часть поля от 0o до +6o представляет необработанный участок 2 поля, поверхность которого лежит немного ниже.
Расположенная над ней диаграмма схематично представляет полученные устройством 5 соответствующие результаты измерений удаления Е. За счет места установки на рабочем агрегате возвышения в профиле Р имеют вид уменьшений удаления. Представление интенсивности I на расположенной выше диаграмме на фиг. 1 имеет перевернутый вид относительно диаграммы замеров удаления Е. Интенсивность I отражения лазерных лучей на обработанном участке 1 поля выше, чем на необработанном участке 2 поля.
Для обработки величин представляет интерес только то место, в котором происходит наибольший скачок. Поэтому измеренные величины по ширине рабочего диапазона устройства приводят по наименьшей величине в качестве эталонной величины и не представляют во всем объеме. Все последующие измерения могут таким же образом сравниваться друг с другом и использоваться для распознавания задающей линии.
Угол α лазерного луча 6, при котором лазерный луч 6 и направление движения машины проходят параллельно друг другу, принимается как угол поворота α=0o. Из диаграмм Е и I на фиг.1 видно, что распознанная граница и относящееся к ней действительное положение соответствуют углу α=0o. Согласно этим данным машина следует точно по распознанной задающей величине/борозде. Изменения направления движения здесь не требуется.
На фиг.2 показан в плане тягач 3 с навесным плугом 4. На плуге непосредственно над границей обработки 8 установлено устройство 5. Устройство 5 посылает электромагнитную волну в направлении движения. Волна сканирует в диапазоне 9 поворота таким образом, что угол поворота α=0o совмещает середину области поворота с осью, параллельной направлению движения.
Если в представленном варианте установки устройства следующий по задающей борозде 7 плуг нагружен неправильно, это может быть откорректировано за счет смещения устройства 5 в горизонтальном направлении.
При применении устройства на оборотном плуге после поворота плуга устройство автоматически устанавливается в свое рабочее положение.
На фиг.3 представлены диаграммы, сходные с диаграммами по фиг.1. На нижней диаграмме показан профиль Р, проходящий через кромку жатвы и привязанный к углу α поворота в рабочем диапазоне устройства 5 по изобретению. На расположенных выше диаграммах Е и I представлены результаты измерений по всей ширине диапазона угла поворота. В области от -6o до -1o показан убранный участок 2. Область от -1o до +6o представляет стоящую растительность 1. Убранный участок 2 распознают по удалению Е более высоких величин удаления, а растительность 1 - по укороченным величинам удаления Е. При численной обработке интенсивности взаимосвязь является в точности обратной. Методом численной обработки определяют места скачков, привязывают их к углу поворота и рассчитывают действительное положение границы обработки относительно мгновенного направления движения.
Из фиг.3 следует, что мгновенное направление движения уборочного агрегата и линия границы обработки расходятся на 1o. Далее по этому отклонению должен быть выработан управляющий сигнал, который дает возможность вернуть рабочий агрегат на необходимый заданный курс.
На фиг. 4 показана в плане уборочная машина 10 в процессе работы. На режущем аппарате 11 слева установлено устройство 5. Электромагнитные волны, в данном случае в виде лазерных лучей 6, направлены вперед от режущего аппарата 11 по направлению движения и совершают угловое сканирование над границей обработки. Место установки устройства 5 на режущем аппарате выбирают так, чтобы при желаемом нагружении режущего аппарата центральная линия ширины углового рабочего диапазона устройства лежала точно по линии границы обработки.
На фиг.5 измеренная величина (здесь удаление) представлена в виде отдельных измеренных величин 12 с привязкой величин удаления Е к углу α поворота луча. Посредством интерполяции измеренных величин 12 получают кривую измеренных величин по всей ширине области 9 углового рабочего диапазона устройства 5. Дифференцирование удаления по углу поворота дает информацию о положении наибольших скачков измеренных величин и соответственно границы обработки относительно направления движения уборочной машины. На данной фиг. 5 показаны результаты измеренных удалений по ширине углового рабочего диапазона у границы жатвы. Здесь граница обработки лежит на месте скачка 13 измеренной величины при угле поворота примерно -2,8o.
На фиг. 6 на общей диаграмме представлено множество измеренных величин для двух специфических величин границы обработки с распределением по ширине рабочего диапазона устройства. На одной диаграмме представлено удаление Е, а на другой интенсивность I с привязкой каждой измеренной величины к углу α поворота луча. Обе кривые измеренных величин имеют сходные пропорциональные траектории. Обе кривые имеют максимум при α=1o. Отсюда следует, что в этом месте на необработанном участке поля проходит полоса разметки. Из-за углубления полосы разметки увеличивается величина удаления. На этом же месте отражение имеет более высокую интенсивность. Как правило, это вызвано более высокой влажностью в полосе разметки.
Благодаря комбинации отдельных измеренных величин имеется возможность надежно выявить основное прохождение линии даже в кривых, трудно поддающихся анализу. Так, например, в данном случае обе кривые имеют максимальные величины на одном и том же месте.
Изобретение относится к устройству и способу для распознавания границ обработки или задающих величин, которые подвергают численной обработке для автоматического управления движением по курсу вдоль этих задающих величин. В способе используют электромагнитные волны, излучаемые передающим аппаратом в направлении движения машины. По отражению электромагнитной волны вычисляют специфические величины границы обработки и по ним вырабатывают управляющий сигнал рассогласования для регулирующего устройства управления движением по курсу. Устройство устанавливают на рабочем агрегате вблизи границы обработки и выравнивают таким образом, что граница обработки распознается перед обработкой. Благодаря применению работающего с электромагнитными волнами устройства в виде устройства сканирования, а также численной обработке множества содержащих данные отражения специфических задающих величин границы обработки создано устройство бесконтактного принципа действия, которое дает возможность с необходимым упреждением распознавать все возможные в сельскохозяйственном производстве границы обработки или задающие величины. Кроме того, метод численной обработки для распознавания различных границ обработки или задающих величин автоматически выбирается в соответствии с способом селекции. Такие технология и конструктивное выполнение позволят повысить качество распознавания различных границ обработки в сельскохозяйственном производстве. 2 с. и 19 з.п. ф-лы, 6 ил.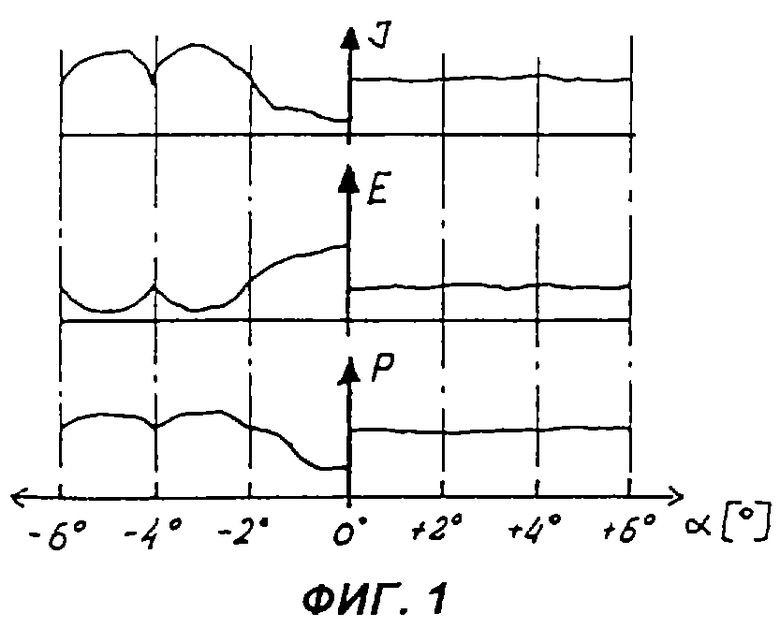
| СПОСОБ ПРОИЗВОДСТВА КОМПОТА ИЗ ГРУШ И АЙВЫ | 2011 |
|
RU2455836C1 |
| DE 19508942 А1, 19.09.1996 | |||
| СПОСОБ АВТОВОЖДЕНИЯ СЕЛЬХОЗАГРЕГАТА | 1991 |
|
RU2025924C1 |

