Область техники
Изобретение относится к управлению самоходной сельхозмашиной, содержащей по меньшей мере один эксплуатируемый при движении машины рабочий аппарат, в особенности к уборочной машине.
Уровень техники
При движении сельхозмашины в процессе эксплуатации могут создаваться ситуации, в которых требуется быстрая остановка машины и рабочего аппарата, например, для того, чтобы предотвратить попадание в машину постороннего материала, который может вызвать повреждение рабочего аппарата, или задержку в работе на удаление этого материала из рабочего аппарата. Другим примером ситуации может служить внезапное появление на пути машины людей или животных, которые могут быть травмированы или даже убиты. Так, из патентного документа DE 10064860 A1 известно оснащение приемных органов самоходной уборочной машины детектором металла, который при распознавании выдает сигнал экстренной остановки. Однако для этого металл должен сначала попасть в приемные органы, так что он должен быть удален из приемного канала перед продолжением процесса уборки. Таким образом, перерыв в процессе уборки неизбежен.
На практике часто случается, что водитель уборочной машины распознает находящееся впереди препятствие до его захвата приемными органами. В этом случае, с одной стороны, он должен как можно скорее остановить машину, чтобы по возможности предотвратить контакт машины с препятствием. С другой стороны, он должен как можно скорее остановить рабочий аппарат, чтобы в том случае, когда контакт не может быть предотвращен, материал препятствия был затянут в машину по возможности недалеко для снижения возможного повреждения машины и ускорения устранения материала. Поскольку управление движением машины должно осуществляться независимо от управления эксплуатацией рабочего аппарата, от водителя требуются два последовательных вмешательства в управление, чтобы остановить машину и рабочий аппарат. Это продлевает промежуток времени между распознаванием препятствия и остановкой рабочего аппарата и повышает риск проникновения постороннего материала.
В патентном документе DE 10208984 A1 предложено управление зерноуборочным комбайном, при котором положение рычага управления, определяющего заданную скорость движения зерноуборочного комбайна, может регулироваться как вручную, так и посредством управляющих моторов для настройки скорости движения, определенной автоматическим устройством в качестве оптимальной. Ручная регулировка с отклонением от определенной в качестве оптимальной скорости движения должна преодолеть сопротивление управляющих моторов, что затрудняет экстренную остановку комбайна посредством рычага управления. Поэтому функция экстренной остановки запускается с помощью отдельного от рычага управления переключателя. Для его привода в действие водитель должен взяться за него, что связано с нежелательной потерей времени.
Раскрытие изобретения
Таким образом, существует потребность в самоходной сельхозмашине, которая позволяет в экстренном случае останавливать как движение машины, так и эксплуатацию рабочего аппарата машины без излишней потери времени.
В соответствии с изобретением решение задачи достигается за счет того, что самоходная сельхозмашина, содержащая привод движения, элемент управления, выполненный с возможностью перемещения водителем и предназначенный для управления скоростью движения машины и, по меньшей мере, один рабочий аппарат, который при движении машины по выбору водителя может принимать активное и неактивное состояние, выполнена с возможностью принятия решения, является ли распознанное перемещение элемента управления обычным перемещением управления или экстренным перемещением, и перевода рабочего аппарата в неактивное состояние при принятии решения, что распознанное перемещение является экстренным перемещением.
Согласно первому примеру осуществления элемент управления представляет собой ходовой рычаг, который выполнен с возможностью перемещения, по меньшей мере, с одной степенью свободы в первом направлении для повышения скорости движения машины и в противоположном направлении для снижения скорости движения. Предпочтительно этот рычаг является известным из патентного документа DE 10140975 A1 типом рычага со встроенными в рукоятку элементами управления, которые позволяют помимо управления скоростью движения управлять другими функциями машины.
Предпочтительно машина выполнена с возможностью определения скорости перемещения ходового рычага в одном направлении степени свободы и оценки этого перемещения как экстренного перемещения, когда скорость превышает пороговую величину. В качестве другого условия оценки перемещения в качестве экстренного перемещения может быть предусмотрено, что направление перемещения соответствует снижению скорости движения. Однако возможно также, что любое достаточно быстрое перемещение ходового рычага, которое может быть вызвано непроизвольным резким движением водителя, независимо от его направления расценивается как экстренное перемещение, поскольку при работе на поле не бывает таких ситуаций, которые требовали бы быстрого ускорения, таких как, например, необходимость быстрого выезда машины из опасной зоны.
Пороговая величина скорости ходового рычага, выше которой движение квалифицируется как экстренное перемещение, в отдельном конкретном случае естественно зависит от сопротивления перемещению или от массы, перемещаемой рычагом. В общем случае целесообразными и реалистичными показали себя минимальная величина скорости перемещения в 300 мм/с и максимальная величина в 600 мм/с.
В том случае, когда к каждому положению элемента управления привязана заданная величина скорости движения машины, независимо от скорости перемещения элемента управления его перемещение расценивается как экстренное перемещение, когда расхождение между действительной скоростью движения машины и заданной величиной скорости движения, соответствующей этому положению элемента управления, превышает пороговую величину. Другими словами, перемещение элемента управления расценивается как экстренное, когда оно настолько быстро, что действительная скорость движения машины не в состоянии следовать за изменением заданной величины скорости движения.
Элемент управления может также представлять собой тормозную педаль.
В этом случае машина может быть выполнена с возможностью определения скорости перемещения тормозной педали и оценки этого перемещения в качестве экстренного перемещения, когда скорость превышает пороговую величину.
Альтернативно машина может быть выполнена с возможностью определения тормозного давления в приводимом в действие от тормозной педали тормозном контуре и оценки перемещения в качестве экстренного перемещения, когда скорость вызываемого им повышения давления превышает пороговую величину. Это решение в общем случае не требует больших затрат для реализации, поскольку транспортные средства, которым разрешен проезд по общественным дорогам, и так оснащены датчиком тормозного давления для управления сигнальными лампами торможения. Этот датчик при минимальных дополнительных затратах может быть приспособлен для использования в целях оценки перемещения тормозной педали.
Предпочтительно релевантная пороговая величина для оценки перемещения в качестве экстренного перемещения может настраиваться водителем. При этом, с одной стороны, водитель может обеспечивать надежное распознавание экстренного перемещения. С другой стороны, возможность настройки дает ему повод освоиться с функциональным определением экстренного перемещения и поведением машины при оценке ситуации как экстренной до возникновения действительной экстренной ситуации, что дополнительно повышает безопасность машины.
В том случае, когда самоходная сельхозмашина представляет собой уборочную машину, предпочтительно предусмотрен рабочий аппарат для того, чтобы в своем активном состоянии выполнять операции с убранной массой при движении машины.
Во время перевода рабочего аппарата в неактивное состояние предпочтительно расход убранной массы в рабочем аппарате регулируется пропорционально скорости движения машины. С одной стороны, в экстренной ситуации это предотвращает наезд машины на убираемую массу без ее подбора. При таком решении распределение плотности потока убранной массы внутри машины не изменяется из-за экстренной остановки, так что после устранения препятствия машина может продолжать движение с того места, на котором она остановилась. Убираемая масса на поле остается не помятой наездом машины и не сдвинутой, что приводило бы к затруднениям при дальнейшем движении машины и потерям убранной массы.
В том случае, когда рабочий аппарат содержит регулируемое по высоте приемное устройство для убранной массы, предпочтительно оно может быть в активном состоянии опущено, а в неактивном состоянии поднято, чтобы предотвращать столкновение с близкими к земле препятствиями и прерывать прием убранной массы.
Далее рабочий аппарат может содержать по меньшей мере один транспортирующий элемент для убранной массы, который в активном состоянии приводится, а в неактивном состоянии находится в покое.
Предпочтительно рабочий аппарат в активном состоянии подсоединен к приводу, а в неактивном состоянии отсоединен от привода. Это обеспечивает возможность использовать привод независимо от эксплуатации рабочего аппарата также и для других целей, таких как привод хода машины.
Самоходная сельхозмашина может представлять собой в особенности зерноуборочный комбайн или полевой измельчитель.
Для того чтобы устранить или, по меньшей мере, снизить потери при перегрузке убранной массы от самоходной сельхозмашины в сопровождающее транспортное средство, целесообразно иметь возможность синхронизировать движение сопровождающего транспортного средства с движением машины также и при экстренной остановке. Для этого предпочтительно, чтобы машина была снабжена интерфейсом для передачи экстренного сообщения, указывающего распознавание экстренного перемещения, на сопровождающее машину транспортное средство, а сопровождающее транспортное средство было снабжено дополнительным к нему интерфейсом для приема от машины экстренного сообщения и выполнено с возможностью проведения экстренной остановки при приеме экстренного сообщения.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения, его другие особенности и преимущества. На чертежах:
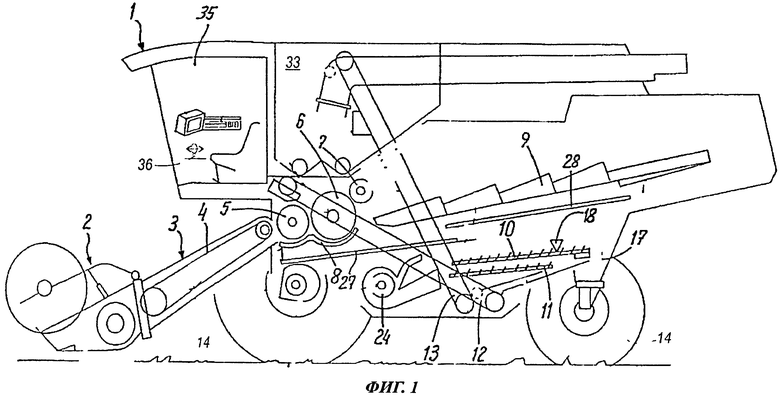
фиг.1 схематично изображает зерноуборочный комбайн по изобретению,
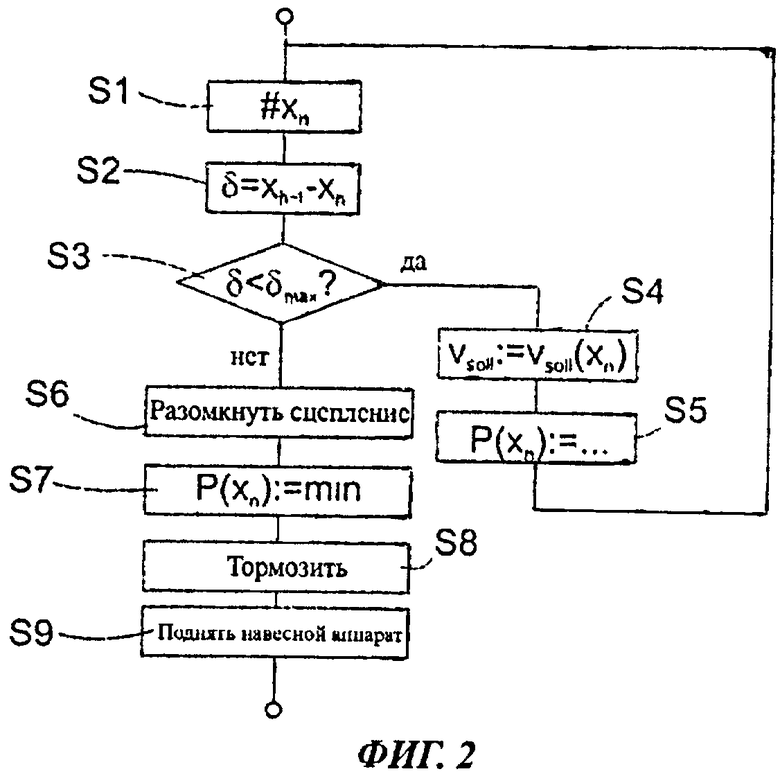
фиг.2 изображает блок-схему процесса управления, выполняемого в устройстве управления комбайна,
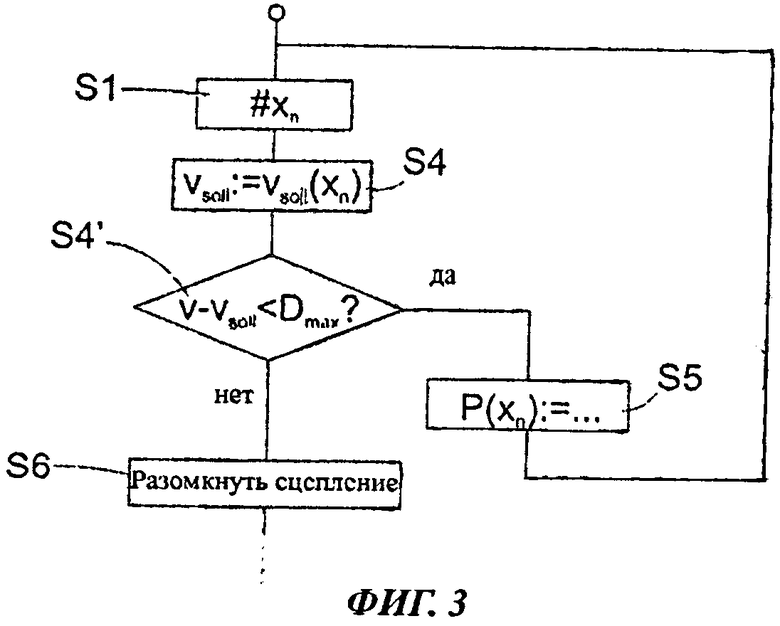
фиг.3 изображает блок-схему альтернативного процесса управления,
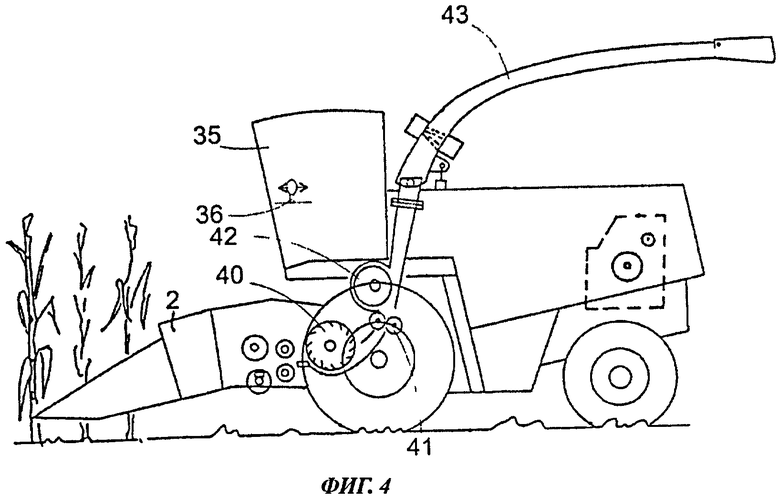
фиг.4 схематично изображает полевой измельчитель по изобретению.
Осуществление изобретения
Показанный на фиг.1 зерноуборочный комбайн 1 содержит четырехколесное шасси и различные рабочие аппараты, в том числе навесной жатвенный аппарат 2, который в общем случае имеет ширину больше ширины шасси и предназначен для срезания убираемой массы и ее подачи к центру поперечно направлению движения. Комбайн содержит далее наклонный питатель 3, который транспортирует срезанную убранную массу внутрь комбайна и для этого оснащен укрепленными на бесконечных тяговых цепях 4 поперечными скребками, продвигающими убранную массу по восходящему днищу наклонного питателя 3. Комбайн содержит далее барабан 5 предварительного разгона, принимающий убранную массу от наклонного питателя 3, молотильный барабан 6, который транспортирует убранную массу через проходной зазор между собой и неподвижным подбарабаньем 8 и при этом посредством ударного воздействия и трения выделяет из убранной массы зерна, проходящие через подбарабанье 8 на подготовительный поддон 27.
Выгружаемая молотильным барабаном 6 солома разворачивается отклоняющим барабаном 7 на несколько соломотрясов 9, расположенных рядом друг с другом по рабочей ширине. Колебательное движение соломотрясов 9 и их ступенчатая конфигурация вызывают подачу соломы к заднему концу комбайна и отделение еще оставшегося в соломе зерна, которое проходит насквозь через соломотрясы 9 на обратный поддон 28 и посредством его колебательного движения подается на подготовительный поддон 27. Подготовительный поддон 27 имеет ступенчатую верхнюю поверхность, так что за счет вибрационного движения подготовительного поддона 27 находящееся на нем зерно с примесями соломенной трухи, половы и частей колосьев подается по наклону вверх и затем передается на верхнее решето 10, обдуваемое очистным вентилятором 24. Во время падения зерна с подготовительного поддона 27 на верхнее решето 10 примеси уносятся воздушным потоком очистного вентилятора 24 и выбрасываются наружу на заднем конце комбайна.
В то время как зерно проходит через вибрационное верхнее решето 10, слишком крупные для прохода через него примеси, такие как куски колосьев, следуют поверх верхнего решета 10 и на его заднем конце поступают в возвращаемую на обработку массу 17, откуда они с помощью возвратного элеватора 12 вновь подаются к молотильному барабану 6. Процесс очистки повторяется аналогичным образом на нижнем решете 11, расположенном под верхним решетом 10. Зерно, прошедшее через верхнее и нижнее решета 10, 11, поступает по зерновому элеватору 13 в зерновой бункер 33.
Для управления движением зерноуборочного комбайна 1 и процессом уборки в кабине 35 водителя расположен ходовой рычаг 36. На рукоятке перемещаемого в направлении движения машины и назад ходового рычага 36 расположены элементы управления для управления различными другими функциями комбайна. К этим функциям могут относиться, например, регулировка высотного положения навесного жатвенного аппарата 2 или управление работой различных внутренних рабочих аппаратов, таких как навесной жатвенный аппарат 2, наклонный питатель 3, барабан 5 предварительного разгона, молотильный барабан 6, соломотряс 9, решета 10, 11, подготовительный поддон 27 и обратный поддон 28 комбайна.
Когда водитель в процессе уборки замечает перед навесным жатвенным аппаратом 2 людей, животных или предметы, которые не должны быть захвачены жатвенным аппаратом 2, его рефлекторной реакцией является резкое смещение ходового рычага 36 назад, чтобы как можно скорее остановить комбайн 1. Следующие защитные меры, такие как подъем навесного жатвенного аппарата 2, остановка режущего ножа жатвенного аппарата 2 и подобные операции путем привода в действие соответствующего элемента управления требуют дополнительного времени даже при расположении этих элементов управления на рукоятке ходового рычага 36. Для снижения до минимума таких потерь времени не представленная здесь система управления, которая связана, с одной стороны, с ходовым рычагом 36 и, с другой стороны, с приводным двигателем комбайна 1, периодически осуществляет процесс или способ управления, блок-схема которого представлена на фиг.2.
На шаге S1 при n-ном повторении или цикле способа система управления запрашивает действительную установку xn ходового рычага через шину CAN (Controller Area Network - шина CAN, асинхронная последовательная коммуникационная шина, использующая в качестве среды передачи витую пару проводов).
На шаге S2 система вычисляет разницу δ между установкой xn и установкой xn-1 при предыдущем цикле процесса. Если эта разница δ меньше, чем жестко заданная предварительно или выбранная пользователем пороговая величина δmax, которая в типовом случае лежит в диапазоне от 300 до 600 мм/с, система управления распознает на шаге S3, что комбайн находится в нормальной эксплуатации и устанавливает новую величину vsoll (xn) заданной скорости движения комбайна на основе заложенной в памяти системы управления характеристической кривой vsoll (x) (шаг S4).
Пороговая величина δmax может быть константой, но она может также определяться возрастающей функцией xn для того, чтобы надежно обеспечить превышение установленной величины даже при небольшом отклонении ходового рычага 36 из нейтрального положения, чтобы мог быть запущен процесс экстренной остановки.
На шаге S5 система управления настраивает мощность приводного двигателя, чтобы свести к минимуму разность между этой новой заданной скоростью vsoll (xn) движения и текущей действительной скоростью vist (xn) движения комбайна и за счет этого отрегулировать эту скорость движения в соответствии с желанием водителя.
Однако если система управления на шаге S3 распознает, что разница δ больше пороговой величины δmax, принимается, что имеет место экстренная ситуация, в которой как сам комбайн 1, так и его рабочие аппараты должны быть остановлены как можно скорее. В этом случае система управления размыкает сцепление между приводным двигателем и колесами 14, а также между приводным двигателем и рабочими аппаратами, устанавливает мощность двигателя на минимальную величину, требуемую для того, чтобы двигатель не заглох, и приводит в действие тормоза на колесах 14 (шаги S6-S8). Вследствие автоматического распознавания экстренной ситуации рабочие аппараты, в особенности режущий нож навесного жатвенного аппарата 2, приводятся в состояние остановки в кратчайшее время. За счет того, что в предпочтительном примере выполнения одновременно еще и поднимается навесной жатвенный аппарат 2 (шаг S9), предотвращается риск того, что в промежутке времени между остановкой режущего ножа жатвенного аппарата 2 и остановкой машины комбайн наедет на убранную массу и помнет ее, а также риск контакта навесного жатвенного аппарата 2 с препятствием. Поэтому после устранения препятствия в большинстве случаев процесс уборки может быть продолжен. При этом комбайн 1 отводится назад на уже убранную площадь и навесной жатвенный аппарат 2 вновь опускается.
В том случае, если причиной для экстренной остановки является исключительно препятствие, которое находится спереди и еще не распознано, может быть достаточно остановить только один рабочий аппарат, а именно навесной жатвенный аппарат 2, и оставить в работе следующие за ним аппараты, такие как наклонный питатель 3 и молотильный барабан 6. Это может быть целесообразно в том случае, когда последующие рабочие аппараты снабжены в соответствующих местах датчиками для распознавания посторонних тел, которые в состоянии при определенных обстоятельствах запускать процесс экстренной остановки рабочих аппаратов и всего комбайна. В том случае, когда таких датчиков нет или они не в состоянии распознавать все возможные причины для экстренной остановки, целесообразно выполнение системы управления таким образом, чтобы вместе с навесным жатвенным аппаратом 2 останавливать также наклонный питатель 3, барабан 5 предварительного разгона, молотильный барабан 6 и отклоняющий барабан 7. В целях упрощения можно останавливать также следующие за ними рабочие аппараты, такие как соломотряс 9 и решета 10, 11, однако может быть также предусмотрено, что они продолжают работать, поскольку когда проникший посторонний материал доходит до них, он обычно их не повреждает и за счет их нормальной работы отделяется от зерна.
На фиг.3 показана блок-схема альтернативного способа управления. Как и в способе по фиг.2, вначале на шаге S1 определяют установку xn ходового рычага 36. На шаге S4 для этой установки назначают заданную величину скорости vsoll (xn) движения. На шаге S4' проверяют, остается ли разность между действительной скоростью v движения комбайна 1 и заданной скоростью vsoll движения ниже максимальной допустимой разности Dmax. Если да, то идет нормальный процесс эксплуатации и мощность привода на шаге S5 регулируют описанным выше образом. При превышении пороговой величины Dmax принимается, что имеет место экстренная ситуация и далее следуют шаги S6-S9.
Способы по фиг.2 и 3 могут комбинироваться друг с другом, при этом шаг S4' включают между шагами S4 и S5 алгоритма по фиг.2.
Вместо положения ходового рычага 36 может отслеживаться также положение тормозной педали (не показана), а процесс экстренной остановки с шагами S6-S9 запускается, когда скорость воздействия на тормозную педаль превышает пороговую величину (или, по аналогии с шагом S2, когда пороговую величину превышает разница между двумя положениями тормозной педали на следующих друг за другом циклах способа). Далее, для тормозных систем с обычным гидравлическим управлением тормозами в качестве критерия для запуска экстренной остановки может учитываться превышение пороговой величины давления тормозной жидкости в системе
В предпочтительном примере осуществления изобретения одинаковый процесс экстренной остановки может запускаться как от ходового рычага 36, так и от тормозной педали.
Изобретение может быть без особых проблем перенесено на другие самоходные сельхозмашины, в особенности такие как полевой измельчитель, схематично представленный на фиг.4. В качестве рабочего аппарата он оснащен, в частности, уборочным навесным аппаратом 2 для срезания убираемой массы, в особенности кукурузы, и измельчительным барабаном 40, к которому подается срезанная убранная масса. Измельченная в измельчительном барабане 40 убранная масса проходит через два плющильных вальца 41, между которыми растираются кукурузные зерна, оставшиеся целыми при проходе через измельчительный барабан 40. Далее убранная масса проходит через метатель 42 в разгрузочной трубе 43 и с их помощью подается в грузовое пространство сопровождающего транспортного средства, которое в процессе уборки следует рядом с полевым измельчителем.
Здесь таким же образом, как это было описано применительно к фиг.2 и 3, система управления отслеживает положение ходового рычага 36 в кабине 35 водителя и при необходимости также положение тормозной педали. Здесь система управления дополнительно оснащена интерфейсом радиосвязи с сопровождающим транспортным средством.
При наличии одного из критериев экстренной ситуации, описанных применительно к фиг.2 или 3, система управления тормозит полевой измельчитель и останавливает его рабочие аппараты 2, 40, 41, 42. Здесь особенно важно, чтобы были остановлены все рабочие аппараты и на сопровождающее транспортное средство не перегружалось никакой убранной массы, поскольку полевой измельчитель в отличие от комбайна не отделяет посторонний материал. Поэтому, если не остановить все рабочие аппараты, случайно захваченные металлические предметы могли бы быть перегружены в сопровождающее транспортное средство и представляли бы значительную опасность для скота, в корм которого поступает убранная масса. За счет того, что система управления останавливает рабочие аппараты одновременно с остановкой полевого измельчителя, возможность перегрузки постороннего материала снижается до минимума.
Для предотвращения перегрузки металлических предметов согласно следующему решению по развитию изобретения на уборочном навесном аппарате 2 или в другом подходящем месте предусмотрен детектор металла, который при распознавании металла в убранной массе запускает процесс экстренной остановки режущего ножа, измельчительного барабана 40, плющильных вальцов 41 и метателя 42. Эти аппараты могут быть остановлены быстрее, чем движение полевого измельчителя. В отличие от этого, когда водитель запускает процесс экстренной остановки посредством привода в действие ходового рычага 36 или тормозной педали, режущий нож и измельчительный барабан 40 останавливаются с синхронной выдержкой времени относительно движения машины. За счет этого предотвращается наезд на убираемую массу перед остановкой, и процесс уборки может быть возобновлен непосредственно после остановки.
Процесс экстренной остановки для полевого измельчителя содержит в дополнение к шагам S6-S9 процесса по фиг.2 следующий шаг выдачи сообщения экстренной остановки на сопровождающее транспортное средство через интерфейс радиосвязи. Сопровождающее транспортное средство оснащено соответствующим интерфейсом радиосвязи и при получении этого сообщения также выполняет экстренную остановку. За счет этого полевой измельчитель и сопровождающее транспортное средство снижают скорость по существу одинаково, и при торможении сопровождающего транспортного средства сохраняется его положение под выпускным отверстием разгрузочной трубы 43 и не происходит потерь измельченной убранной массы.
Во время экстренной остановки отключается функция автопилот или круиз-контроль ("Tempomat"), которая при нормальном процессе уборки выдерживает постоянную скорость движения полевого измельчителя и/или сопровождающего транспортного средства и облегчает последнему синхронное движение рядом с полевым измельчителем.
В том случае, когда кабина 35 водителя демпфируется активным образом, то есть снабжена регулируемыми демпфирующими органами, целесообразно, чтобы во время экстренной остановки система управления повышала жесткость демпфирующих органов для того, чтобы сдерживать резкие продольные и/или колебательные движения кабины 35, превышающие ее свободу перемещений. Благодаря этому устраняются резкие толчки, которые очень неприятны для водителя и создают риск травм.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2005 |
|
RU2384994C2 |
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА С УСТРОЙСТВОМ ОБНАРУЖЕНИЯ ПОСТОРОННИХ ТЕЛ | 2008 |
|
RU2466527C2 |
| РАБОЧАЯ СЕЛЬХОЗМАШИНА | 2008 |
|
RU2472335C2 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СЕЛЬХОЗМАШИНЫ | 2007 |
|
RU2420945C2 |
| РАБОЧАЯ ИЛИ УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2008 |
|
RU2468563C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА | 2005 |
|
RU2389171C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ УБОРОЧНОЙ СЕЛЬХОЗМАШИНОЙ | 2006 |
|
RU2402191C2 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧЕЙ СЕЛЬХОЗМАШИНОЙ | 2008 |
|
RU2482654C2 |
| САМОХОДНЫЙ ПОЛЕВОЙ ИЗМЕЛЬЧИТЕЛЬ | 2008 |
|
RU2463768C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2436279C2 |
Изобретение относится к сельскохозяйственному машиностроению. Самоходная сельхозмашина содержит привод движения, элемент управления и по меньшей мере один рабочий аппарат. Элемент управления выполнен с возможностью перемещения водителем и предназначен для управления скоростью движения. Рабочий аппарат по выбору водителя может принимать активное или неактивное состояние. Сельхозмашина выполнена с возможностью принятия решения, является ли распознанное перемещение элемента управления обычным перемещением управления или экстренным перемещением. Рабочий аппарат переводится в неактивное состояние при решении, что распознанное перемещение является экстренным перемещением. Рабочая сельхозмашина может в экстренном случае останавливаться и обеспечивает прекращение эксплуатации рабочего аппарата без излишней потери времени. 16 з.п. ф-лы, 4 ил.
1. Самоходная сельхозмашина, содержащая привод движения, элемент (36) управления, выполненный с возможностью перемещения водителем и предназначенный для управления скоростью движения машины, и, по меньшей мере, один рабочий аппарат (2, 3, 5-13, 24, 27, 28, 40, 41, 42), который при движении машины по выбору водителя может принимать активное и неактивное состояние, отличающаяся тем, что машина выполнена с возможностью принятия решения, является ли распознанное перемещение элемента (36) управления обычным перемещением управления или экстренным перемещением, и перевода рабочего аппарата (2, 3, 5-13, 24, 27, 28, 40, 41, 42) в неактивное состояние при решении, что распознанное перемещение является экстренным перемещением.
2. Машина по п.1, отличающаяся тем, что элемент управления представляет собой ходовой рычаг (36), который выполнен с возможностью перемещения, по меньшей мере, с одной степенью свободы в первом направлении для повышения скорости движения машины и в противоположном направлении для снижения скорости движения.
3. Машина по п.2, отличающаяся тем, что выполнена с возможностью определения скорости перемещения ходового рычага (36) и оценки этого перемещения как экстренного перемещения, когда скорость превышает пороговую величину.
4. Машина по п.3, отличающаяся тем, что пороговая величина составляет, по меньшей мере, 300 мм/с.
5. Машина по п.3, отличающаяся тем, что пороговая величина составляет максимум 600 мм/с.
6. Машина по п.1 или 2, отличающаяся тем, что к каждому положению (х) элемента (36) управления привязана заданная величина (vsoll) скорости движения машины, а перемещение элемента (36) управления расценивается как экстренное перемещение, когда расхождение между действительной скоростью (v) движения машины и заданной величиной (vsoll) скорости движения превышает пороговую величину.
7. Машина по п.1, отличающаяся тем, что элемент управления представляет собой тормозную педаль.
8. Машина по п.7, отличающаяся тем, что выполнена с возможностью определения скорости перемещения тормозной педали и оценки этого перемещения в качестве экстренного перемещения, когда скорость превышает пороговую величину (Dmax).
9. Машина по п.7, отличающаяся тем, что выполнена с возможностью определения тормозного давления в приводимом в действие от тормозной педали тормозном контуре и оценки перемещения в качестве экстренного перемещения, когда скорость вызываемого им повышения давления превышает пороговую величину.
10. Машина по любому из пп.3-5, 8 или 9, отличающаяся тем, что пороговая величина может устанавливаться водителем.
11. Машина по любому из пп.1-5, 7, 9, отличающаяся тем, что представляет собой уборочную машину и предусмотрен рабочий аппарат (2, 3, 5-13, 24, 27, 28, 40, 41, 42) для того, чтобы в своем активном состоянии выполнять операции с убранной массой при движении машины.
12. Машина по п.11, отличающаяся тем, что во время перевода рабочего аппарата (2, 3, 5-13, 24, 27, 28, 40, 41, 42) в неактивное состояние расход убранной массы в рабочем аппарате регулируется пропорционально скорости движения машины.
13. Машина по любому из пп.1-5,7-9, отличающаяся тем, что рабочий аппарат содержит приемное устройство (2) для убранной массы, которое в активном состоянии опущено, а в неактивном состоянии поднято.
14. Машина по любому из пп.1-5,7-9, отличающаяся тем, что рабочий аппарат содержит, по меньшей мере, один транспортирующий элемент (3) для убранной массы, который в активном состоянии приводится, а в неактивном состоянии находится в покое.
15. Машина по любому из пп.1-5, 7-9, отличающаяся тем, что рабочий аппарат в активном состоянии подсоединен к приводу, а в неактивном состоянии отсоединен от привода.
16. Машина по любому из пп.1-5, 7-9, отличающаяся тем, что представляет собой полевой измельчитель или зерноуборочный комбайн.
17. Машина по любому из пп.1-5, 7-9, отличающаяся тем, что снабжена интерфейсом для передачи экстренного сообщения, указывающего распознавание экстренного перемещения, на сопровождающее машину транспортное средство.
| УСТРОЙСТВО ДЛЯ ОПТИМИЗАЦИИ ПЕРЕГРУЗКИ УБРАННОЙ МАССЫ НА СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2001 |
|
RU2282972C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕГРУЗОЧНЫМ АППАРАТОМ | 1999 |
|
RU2245611C2 |
| US 4324091 A, 13.04.1982 | |||
| СПОСОБ ЗАПИСИ ВИДЕОИНФОРМАЦИИ НА НОСИТЕЛЕ ЗАПИСИ, НОСИТЕЛЬ ЗАПИСИ И УСТРОЙСТВА ДЛЯ ПОИСКА И ВОСПРОИЗВЕДЕНИЯ ИЗОБРАЖЕНИЯ | 1991 |
|
RU2073914C1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ БЕТОННОЙ СМЕСИ | 1991 |
|
RU2016885C1 |

