Область техники
Изобретение относится к способу юстировки узла датчиков на сельскохозяйственной машине в соответствии с ограничительной частью пункта 1 формулы изобретения и устройству для юстировки в соответствии с ограничительной частью пункта 6 формулы изобретения.
Уровень техники
Из патента США №3991618 известно устройство для распознавания кромки обработки поля, в котором узел датчиков содержит несколько сенсоров или датчиков, установленных на уборочной машине в нескольких местах вблизи поверхности земли. Часть сенсоров расположена на переднем конце машины, а другая часть - на заднем конце. Сенсоры являются контактными и выполнены со щупами, которые определяют наличие или отсутствие убираемой культуры. Вырабатываемый сенсорами сигнал воздействует на систему управления движением, что позволяет уборочной машине самостоятельно следовать вдоль кромки обработки поля. Это устройство является наиболее близким к заявляемому и принято в качестве прототипа.
Недостаток известного устройства состоит в том, что наличие нескольких сенсоров, расположенных в различных местах, делает его относительно дорогостоящим. Кроме того, вследствие механической нагрузки на сенсоры они подвергаются нежелательному износу. Из-за расположения сенсоров близко к земле существует риск их повреждения при неожиданном внешнем воздействии.
Сущность изобретения
Задачей, на решение которой направлено изобретение, является создание способа юстировки установленного на сельскохозяйственной машине узла датчиков таким образом, что может легко определяться и устанавливаться заданное положение юстировки узла датчиков.
Для решения поставленной задачи в способе юстировки укрепленного на сельскохозяйственной машине узла датчиков, генерирующего сигнал, передаваемый на систему управления движением для обеспечения движения сельскохозяйственной машины вдоль кромки обработки поля, в соответствии с изобретением используют средства, обеспечивающие самостоятельную ориентацию узла датчиков на опорную (базовую, начальную) точку или опорную (базовую, начальную) линию.
Особое преимущество способа по изобретению состоит в том, что установка узла датчиков в заданное положение юстировки (юстированное положение) опознается и осуществляется простым образом при помощи электронных средств, которые используются также для других целей. К узлу датчиков присоединено установочное средство, посредством которого узел датчиков может быть смещен в горизонтальном и/или вертикальном направлении. Это установочное средство управляется центральным блоком обработки данных. В этом центральном блоке обработки данных обрабатывается сигнал, получаемый от узла датчиков, и в зависимости от него узел датчиков смещается далее до тех пор, пока им не будет достигнуто заданное юстированное положение, опознаваемое по опорной (базовой, начальной) точке или опорной (базовой, начальной) линии.
Согласно другой модификации способа индикаторное устройство служит для контрольной проверки достижения заданного положения юстировки индикаторным полем. Иначе говоря, расположение индикаторных элементов индикаторного устройства имеет такое соотношение к положению сельскохозяйственной машины относительно кромки обработки, что заданное положение юстировки может опознаваться посредством соответствующего согласования управляемых сигналом датчиков индикаторных элементов с предварительно заданным знаком опознавания. Управляемые индикаторные элементы сигнализируют о считанном узлом датчиков положении определенного участка грунта. Знак опознавания сигнализирует об опознанном заданном юстированном положении, полученном от упомянутых опорной точки или опорной линии. Предпочтительно знак опознавания находится в центральной области индикаторного устройства для упрощения опознавания и контрольной проверки юстированного положения.
Еще одной задачей изобретения является создание устройства для юстировки узла датчиков, позволяющего быстро и надежно производить фиксацию узла датчиков относительно опорной (базовой, начальной) точки на сельскохозяйственной машине.
Для решения поставленной задачи устройство для юстировки узла датчиков, устанавливаемого на сельскохозяйственной машине для распознавания кромки обработки поля и генерирующего сигнал, воздействующий на систему управления движением для передвижения машины вдоль распознанной кромки обработки поля, в соответствии с изобретением снабжено оптическим индикаторным устройством с индикаторными элементами, присоединяемым к узлу датчиков таким образом, что в стартовой позиции сельскохозяйственной машины по меньшей мере посредством одного индикаторного элемента сигнализируется ориентация узла датчиков в горизонтальном и/или вертикальном направлении по отношению к кромке обработки поля.
Особое преимущество устройства для юстировки по изобретению состоит в том, что с помощью оптического индикаторного устройства оно обеспечивает возможность простой юстировки узла датчиков на сельскохозяйственной машине.
В одном из вариантов выполнения устройства для юстировки индикаторное устройство содержит несколько расположенных в ряд индикаторных элементов, при этом по меньшей мере два ряда индикаторных элементов отстоят друг от друга. Заданное положение юстировки узла датчиков достигается тогда, когда освещаются (зажигаются) обращенные друг к другу крайние индикаторные элементы этих рядов. Таким образом, заданное положение юстировки узла датчиков указывается индикаторными элементами посредством того, что расстояние между светящимися элементами является минимально возможным.
Согласно одному из вариантов выполнения изобретения ряды индикаторных элементов соответствуют числу возможных направлений смещения при юстировке узла датчиков. При сочетании движения юстировки в горизонтальной и в вертикальной плоскости имеются две составляющие движения, каждое из которых символизируется одним рядом индикаторных элементов.
Согласно одному из вариантов выполнения устройства для юстировки узел датчиков выполнен с возможностью установки на несущей стойке сельскохозяйственной машины с помощью П-образного кронштейна. За счет выполнения расположенных вдоль оси отверстий в противолежащих полках П-образного кронштейна и размещения в них крепежных средств создается возможность однозначной и надежной установки узла датчиков относительно образованной оси поворота. В тех случаях, когда на узле датчиков имеется П-образный кронштейн, он может образовывать с несущей стойкой полое пространство для размещения в нем узла датчиков с защитой от влияния погодных условий.
Согласно другому варианту выполнения устройства для юстировки узел датчиков установлен с возможностью поворота соосно на вертикальной несущей стойке уборочной машины, и при этом по меньшей мере один ряд индикаторных элементов проходит в осевом направлении стойки. За счет этого облегчаются согласованность с направлением смещения и считывание с индикаторного устройства.
Согласно еще одному варианту выполнения устройства для юстировки узел датчиков установлен на несущей стойке, которая проходит поперечно направлению движения машины. При освобождении крепления узла датчиков его можно одновременно смещать вдоль несущей стойки и поворачивать вокруг нее.
Другие преимущества изобретения будут ясны из дополнительных пунктов формулы изобретения.
Краткий перечень фигур чертежей
Далее изобретение будет описано более подробно на двух примерах выполнения со ссылками на чертежи, на которых:
фиг.1 изображает на виде сверху оснащенную узлом датчиков уборочную машину в процессе уборки,
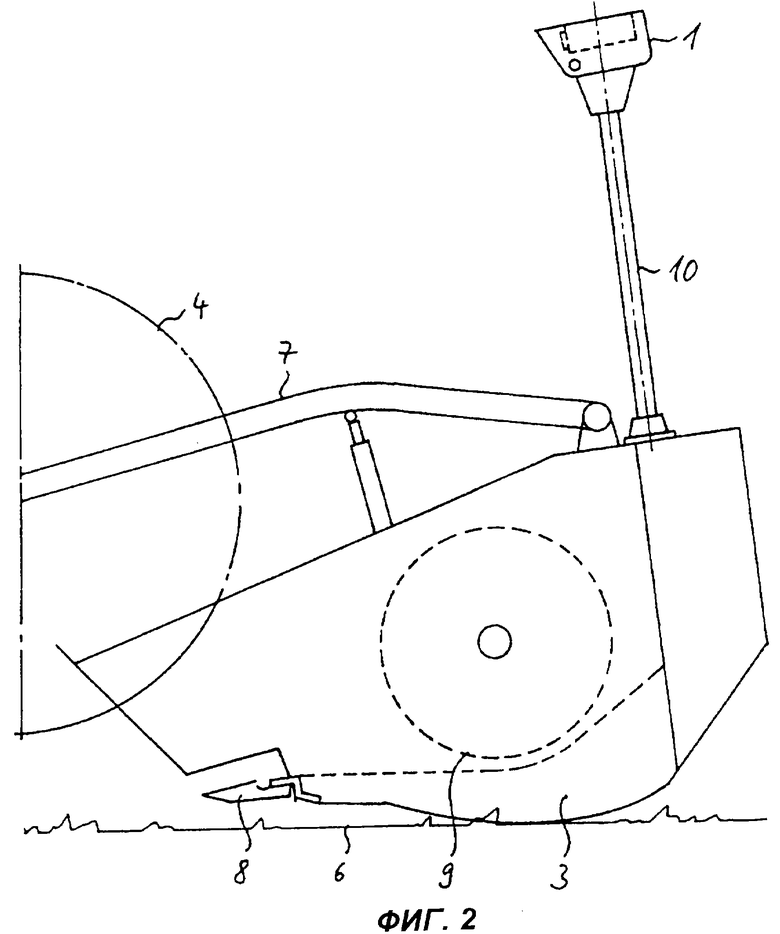
фиг.2 изображает на виде сбоку узел датчиков, укрепленный на режущем аппарате уборочной машины в соответствии с первым примером выполнения,
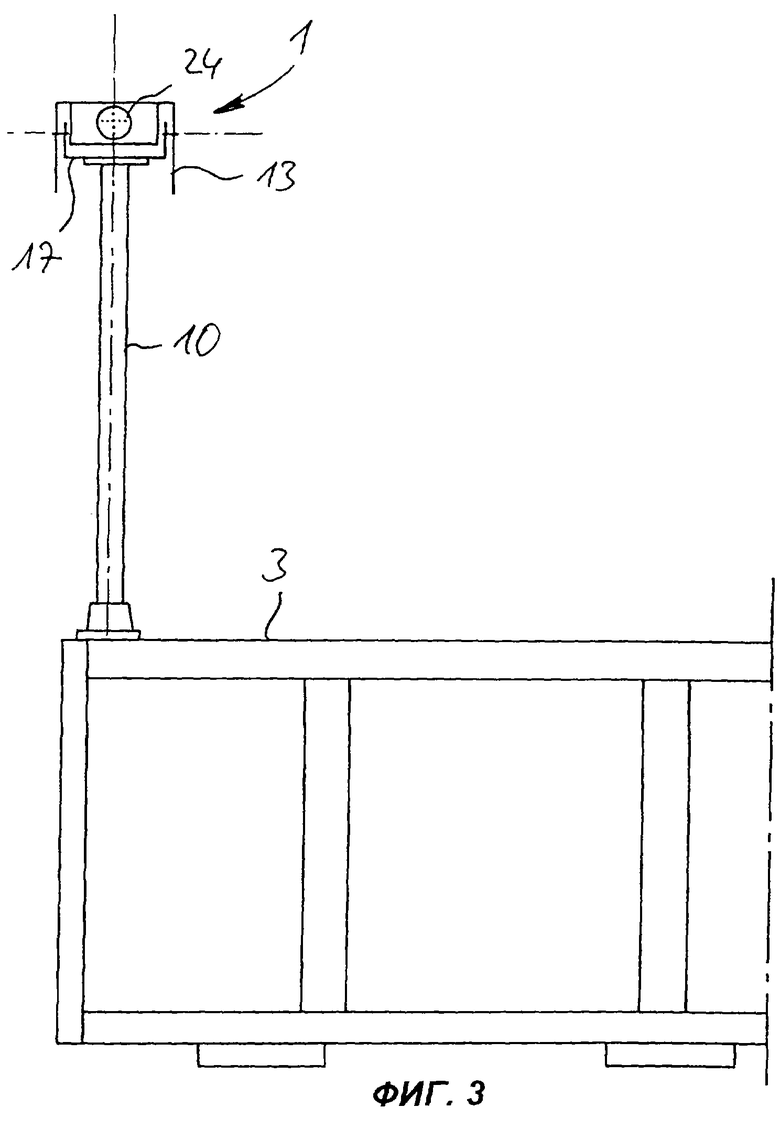
фиг.3 изображает узел датчиков по фиг.2 на виде сзади,
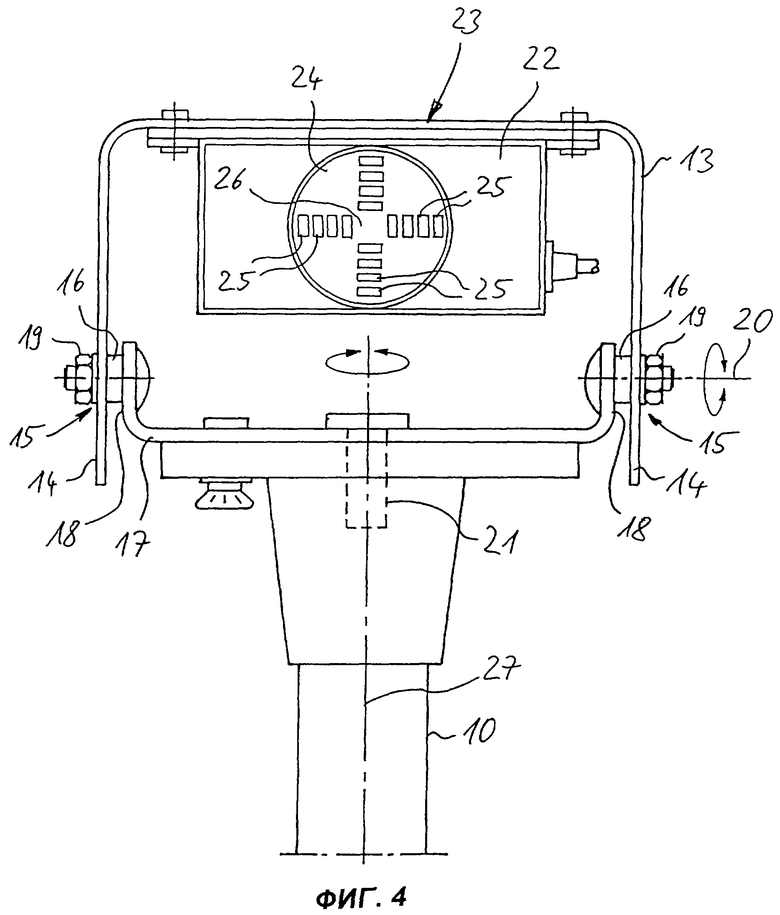
фиг.4 изображает узел датчиков по фиг.3 в увеличенном масштабе,
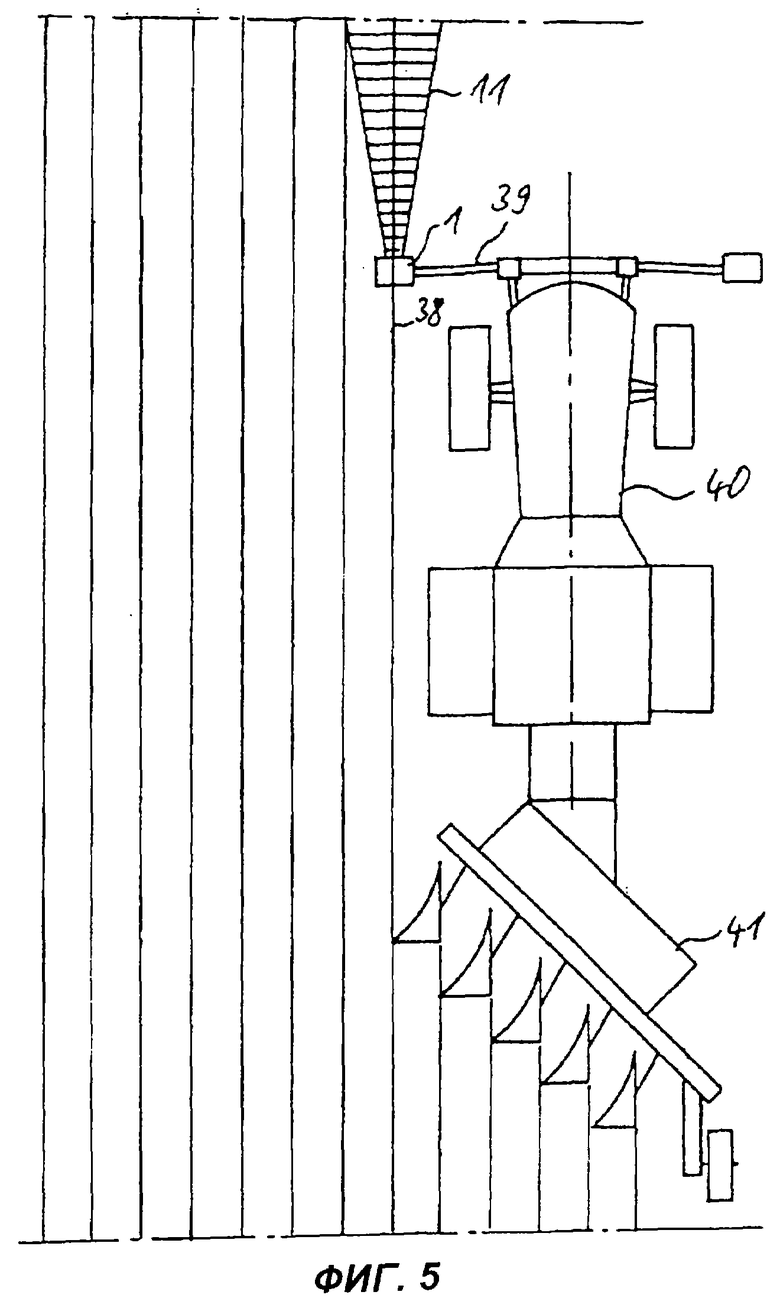
фиг.5 изображает установку узла датчиков в соответствии с изобретением на тракторе,
фиг.6 изображает на виде сбоку узел датчиков, укрепленный на режущем аппарате уборочной машины в соответствии со вторым примером выполнения,
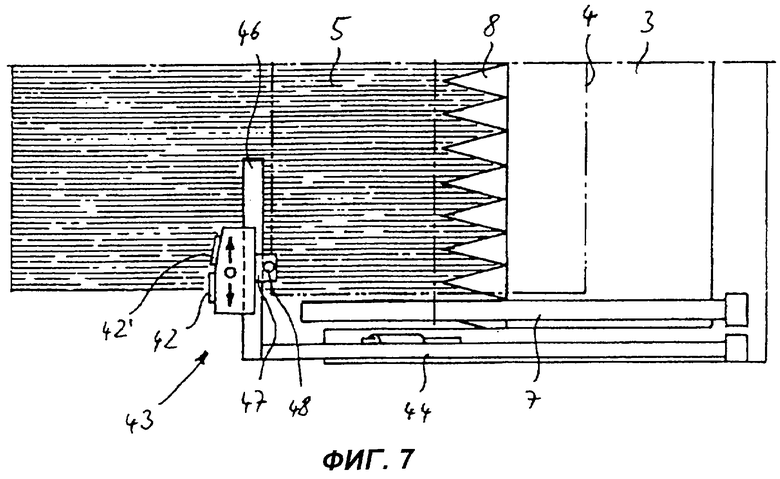
фиг.7 изображает узел датчиков по фиг.6 на виде сверху,
фиг.8 представляет блок-схему связи конструктивных узлов машины с узлом датчиков, и
фиг.9 представляет блок-схему связи конструктивных узлов машины с узлом датчиков при управлении движением машины.
Сведения, подтверждающие возможность осуществления изобретения
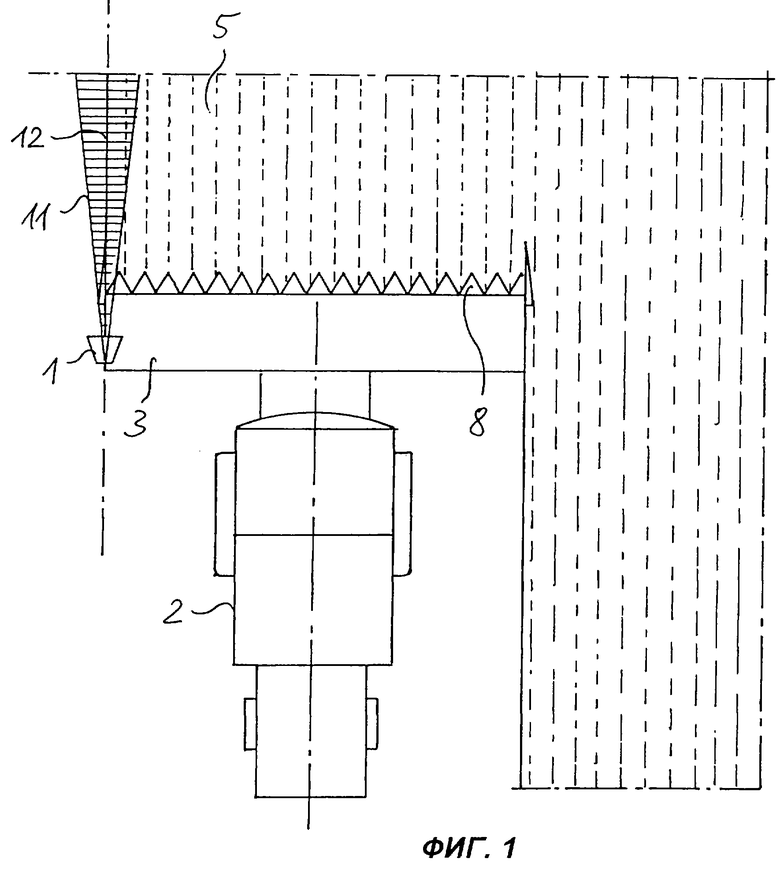
Устройство в соответствии с изобретением может использоваться для распознавания кромки обработки в процессе обработки поля. Так, например, оно может использоваться в уборочных машинах для распознавания кромки уборки или в тягачах для распознавания границы обрабатываемого поля, как это показано на фиг.1 и 5.
В первом примере выполнения узел 1 датчиков установлен на самоходной уборочной машине в виде зерноуборочного комбайна 2. Узел 1 датчиков укреплен на режущем аппарате 3 комбайна 2 слева по направлению движения комбайна. Как видно на фиг.2, комбайн оснащен мотовилом 4, которое направляет убираемую растительность к подающему валку 9. Мотовило 4 установлено на поворотном несущем рычаге 7. В нижней части режущего аппарата 3 между мотовилом 4 и подающим валком 9 расположен нож 8. В задней части режущего аппарата 3 расположена отходящая вверх несущая стойка 10, на верхнем свободном конце которой укреплен узел 1 датчиков. Несущая стойка 10 расположена наклонно с наклоном вперед под острым углом к вертикали с целью облегчения юстировки узла 1 датчиков в направлении кромки 12 обработки поля. Несущая стойка 10 имеет такую длину, чтобы узел 1 датчиков мог воспринимать кромку 12 обработки поля поверх мотовила 4.
Узел 1 датчиков ориентирован в направлении движения комбайна 2 и имеет область 11 считывания.
Узел 1 датчиков снабжен оптическим лазерным датчиком, который настроен на предварительно заданную дальность. Предварительно заданная дальность, которая может лежать в пределах 12-16 м и предпочтительно составляет 14 м, зависит от системы управления поворотом и скорости движения комбайна 2. Если узел 1 датчиков настроен на слишком большую дальность, изменение кромки 12 обработки опознается слишком рано, в результате чего слишком рано начинает срабатывать система управления движением комбайна и происходит избыточное управление. Если дальность настроена слишком малой, отклонение кромки 12 обработки опознается слишком поздно, так что система управления движением комбайна не может среагировать своевременно.
Кроме такой юстировки узла 1 датчиков в вертикальной плоскости необходима также его юстировка в горизонтальной плоскости, так как кромка 12 обработки должна находиться в средней части области 11 считывания узла 1 датчиков. Для этого предусмотрено устройство для юстировки, с помощью которого узел 1 датчиков юстируют в начале процесса движения или уборки.
Предварительным условием юстировки в предписанном порядке является установка комбайна 2 в направлении движения параллельно заданной кромке 12 обработки поля. В этой стартовой позиции узел 1 датчиков может быть отюстирован относительно кромки 12 обработки. В качестве опорной (базовой, начальной) точки для юстировки узла 1 датчиков может служить имеющаяся кромка 12 обработки поля, или граница поля, или особо отмеченная точка на самом комбайне. При назначении опорной точки на комбайне 2 необходимо предусмотреть соответствующее силовое устройство для перевода узла 1 датчиков из положения юстировки в рабочее положение.
Описываемое в данном примере устройство для юстировки ориентируется на кромку 12 обработки. Устройство для юстировки обеспечивает улучшение загрузки режущего аппарата 3, так как после успешной юстировки узла 1 датчиков система управления движением комбайна 2 автоматически ведет боковую кромку режущего аппарата 3 вдоль кромки 12 обработки. Юстировка обеспечивает срезание убираемой культуры при оптимальном использовании ширины режущего аппарата.
Узел 1 датчиков укреплен на П-образном кронштейне 13, обращенном вниз своей открытой частью (фиг.4). В полках 14 кронштейна 13 выполнены соосные отверстия 15, в которые входят крепежные средства 16 для винтового крепления к другому П-образному кронштейну 17, укрепленному на стойке 10. Кронштейн 17 стойки 10 имеет вертикальные полки 18 с отверстиями, которые совпадают с отверстиями 15 кронштейна 13. Кронштейны 13 и 17 соединены между собой болтами 16 с образованием замкнутого силового контура. При отпущенных гайках 19 на полках 14 узел 1 датчиков может быть повернут вокруг оси 20 отверстий 15. Этим поворотом осуществляется юстировка узла 1 датчиков в вертикальной плоскости.
Для юстировки узла 1 датчиков в горизонтальной плоскости П-образный кронштейн 17 соединен с несущей стойкой 10 с помощью винтового соединения 21. Винтовое соединение 21 проходит в осевом направлении несущей стойки 10 и в своем освобожденном состоянии допускает поворот П-образного кронштейна 17 в круговом направлении относительно несущей стойки 10. При этом одновременно поворачивается и кронштейн 13 узла 1 датчиков, который жестко соединен с кронштейном 17 болтами 16.
Настройка узла 1 датчиков может осуществляться независимо в горизонтальном или вертикальном направлении посредством воздействия на крепежные средства 16 с одной стороны и на винтовое соединение 21 с другой стороны. Это упрощает юстировку, так как этапы юстировки могут выполняться последовательно.
Для индикации заданного положения юстировки узла 1 датчиков на его задней стороне 22 имеется индикаторное устройство 23. Индикаторное устройство 23 содержит индикаторное поле 24 с четырьмя рядами индикаторных элементов 25, расположенными под прямыми углами друг к другу. Каждый ряд состоит из четырех индикаторных элементов 25, выполненных в виде светодиодов (СИД). Индикаторные элементы 25 сходятся к общей центральной точке 26, которая образует целевую точку юстировки узла 1 датчиков. Юстировка выполнена правильно, когда зажигаются все индикаторные элементы 25, ближайшие к центральной точке 26. Индикаторное поле 24 выполнено по типу оптического прицела, действие которого понятно само собой для водителя комбайна или машины.
При повороте узла 1 датчиков вокруг горизонтальной оси 20 поле освещенности индикаторных элементов 25 смещается вдоль ряда индикаторных элементов 25, соосного оси 27. При повороте узла 1 датчиков вокруг оси 27 несущей стойки поле освещенности смещается вдоль горизонтального ряда индикаторных элементов 25. Вертикальный ряд индикаторных элементов 25 проходит параллельно или соосно оси 27 поворота. Горизонтальный ряд индикаторных элементов 25 проходит параллельно оси 20 поворота. В процессе юстировки комбайн 2 занимает неподвижное положение, юстировка производится с ориентацией на кромку 12 обработки, которая в данном примере представляет собой границу убранной культуры.
После того как узел 1 датчиков поворачивают вначале вокруг оси 20, а затем вокруг оси 27 таким образом, что светятся ближайшие к центральной точке 26 индикаторные элементы 25, далее воздействуют на крепежные средства 16 и, соответственно, винтовое соединение 21, закрепляя узел датчиков в отрегулированном положении. Вслед за этим может быть начат процесс уборки. Указанную юстировку проводят предпочтительно в начале каждого процесса уборки, при этом ее легко может провести один оператор.
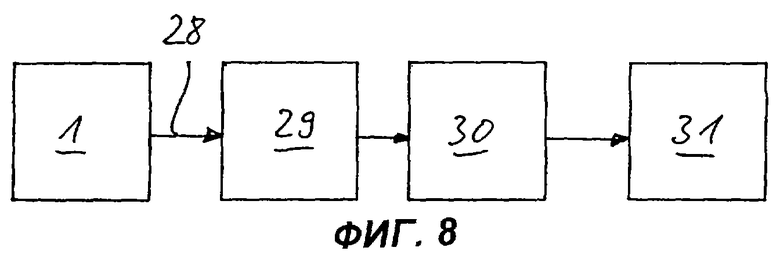
Как показано на фиг.8, в процессе движения комбайна 2 вырабатываемый узлом 1 датчиков сигнал 28 передается на блок 29 обработки данных. Он выполнен предпочтительно в виде электронного блока управления с заложенной в нем программой управления движением, которая воздействует на систему 30 управления движением. Система 30 управления движением содержит управляющие клапаны, с помощью которых приводится в действие цилиндр 31 управления поворотом. Таким образом, сигнал 28 используется для управления цилиндром 31 управления поворотом.
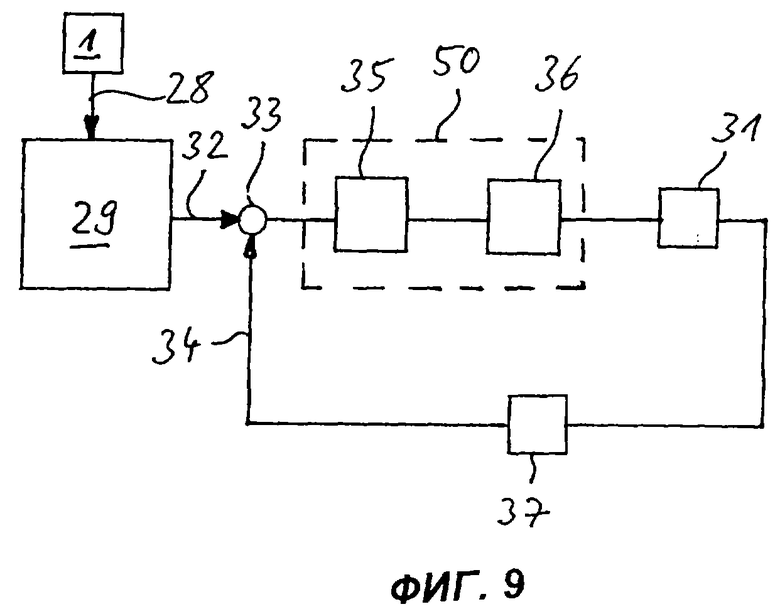
Другая схема использования сигнала датчиков для управления цилиндром 31 управления поворотом показана на фиг.9. Сигнал 28 обрабатывается в блоке 29 обработки данных по предварительно заданной программе управления движением. Блок 29 обработки данных выдает на выход заданную величину 32, которая вводится в компаратор 33. В нем производится сравнение с действительной величиной 34 угла поворота. Величина рассогласования подается на вход устройства 35 регулирования, которое выполнено, предпочтительно, в виде цифрового устройства регулирования. Выходной сигнал устройства 35 регулирования воздействует на один или несколько клапанов 36, управляющих цилиндром 31 управления поворотом. Действительная установка цилиндра 31 управления поворотом воспринимается, обрабатывается преобразователем 37, который может содержать измерительный преобразователь или аналого-цифровой преобразователь, и передается в качестве действительной величины 34 в компаратор 33. Устройство 35 регулирования и клапан 36 образуют часть устройства 50 управления движением. Эта часть дает возможность автоматической установки цилиндра 31 управления поворотом на заданный угол поворота, предварительно заданный блоком 29 обработки данных. За счет этого возможен режим автоматического вождения машины при уборке. При этом за счет распознавания узлом 1 датчиков кромки убираемой растительности осуществляется надежное рабочее движение без потерь времени с оптимальной загрузкой всей ширины режущего аппарата. Благодаря настройке узла 1 датчиков по левой кромке режущего аппарата 3 осуществляется точное считывание кромки 12 обработки и срезание убираемой культуры вплотную к кромке.
Согласно другому примеру выполнения по фиг.5 узел 1 датчиков может использоваться также для распознавания полевой кромки 38, образованной полевой бороздой. Полевая кромка 38 образует кромку обработки и может быть распознана за счет разницы высот между кромкой 38 и уровнем земли по обе стороны от нее. В этом случае узел 1 датчиков устанавливают на несущей стойке 39 тягача или трактора 40, причем несущая стойка 39 проходит спереди трактора перпендикулярно направлению движения или полевой кромке 38. Узел 1 датчиков установлен вертикально над полевой кромкой 38 и ориентирован вдоль нее. Трактор 40 тянет за собой плуг 41. В этом примере выполнения индикаторное устройство 23 расположено в кабине водителя и служит для контрольной проверки водителем автоматической юстировки, например, с помощью включателя.
Автоматическая самостоятельная юстировка осуществляется посредством обработки и оценки сигнала, вырабатываемого узлом 1 датчиков. Этот сигнал может передаваться на центральный блок 29 обработки данных трактора 40 по электрическому проводу или беспроводным путем. В блоке 29 обработки данных обрабатывается действительный сигнал от датчиков, который символизирует определенное место считываемой поверхности грунта 6. При этом необходимо, чтобы трактор 40 находился в положении, параллельном полевой кромке 38. После выравнивания узла 1 датчиков по полевой кромке 38, при котором узел 1 датчиков или датчик ориентируется параллельно полевой кромке 38, то есть занимает нулевое положение, узел 1 датчиков принимает заданное юстированное положение. Теперь узел 1 датчиков может быть жестко закреплен в этом положении. Это юстированное положение контролируется соответствием светящегося индикаторного элемента 25, который символизирует действительное положение узла 1 датчиков, и предварительно заданного знака опознавания. Этот знак находится предпочтительно в центральной точке 26 индикаторного устройства 23. В зависимости от установленного положения узел 1 датчиков вырабатывает сигнал прямого движения, который может служить направляющей величиной для автоматического управления движением трактора 40.
Согласно альтернативному примеру выполнения по фиг.6 и 7 комбайн 2 может быть оснащен узлом 43 датчиков, содержащим два ультразвуковых датчика 42. Узел 43 датчиков подвижно установлен на несущей стойке 44, которая выступает вперед от режущего аппарата 3. Несущая стойка 44 шарнирно соединена с режущим аппаратом 3 и может поворачиваться установочным устройством 45 установки высоты из рабочего положения, показанного на фиг.6, в транспортное положение. Узлы, совпадающие с первым примером выполнения, обозначены теми же цифрами. В отличие от первого примера выполнения узел 43 датчиков укреплен на держателе 46, который расположен поперечно направлению движения и шарнирно присоединен к несущей стойке 44. Держатель охватывает узел 43 датчиков с помощью зажимного крепежного элемента 47, который выполнен в виде зажимного хомута и укреплен на держателе 46 с помощью винтового соединения 48 с образованием замкнутого силового контура. Соединение этого типа позволяет быстро устанавливать узел 43 датчиков в юстированное положение. При этом узел 43 датчиков может одновременно регулироваться в горизонтальном и вертикальном направлениях. Регулирование положения узла 43 датчиков в горизонтальном направлении производится его смещением вдоль держателя 46.
Узел 43 датчиков содержит первый ультразвуковой датчик 42, ориентированный в направлении движения вдоль кромки 12 обработки, и второй ультразвуковой датчик 42’, который расположен под острым углом к первому датчику и самостоятельно ориентируется на убираемую культуру 5. Ультразвуковые датчики 42, 42’ наклонены к грунту 6 таким образом, что их передаваемый сигнал падает на грунт на расстоянии более 4 м. За счет различной направленности ультразвуковых датчиков 42, 42’ положение кромки 12 обработки поля может быть определено по соотношению отраженных сигналов. Вырабатываемый сигнал датчиков может использоваться для управления системой управления движением комбайна 2 таким же образом, как и в первом примере выполнения.
Индикация юстировки ультразвуковых датчиков 42, 42’ производится отдельным индикаторным устройством 49, выполненным в виде светодиодов. Для юстировки в вертикальной плоскости на боковой стенке узла 43 датчиков расположен верхний индикаторный элемент 49’ и нижний индикаторный элемент 49". Если узел 43 датчиков находится на слишком большой высоте над землей 6, верхний индикаторный элемент 49’ светится красным светом. Если узел 43 датчиков находится на слишком малой высоте над землей 6, красным светом светится нижний индикаторный элемент 49’’. Когда узел 43 датчиков находится на правильной высоте над землей 6, верхний и нижний индикаторные элементы 49’, 49’’ светятся зеленым светом. В узел 43 датчиков встроена гистерезисная схема включения, не допускающая нежелательного мигания индикаторных элементов 49’, 49’’.
Для юстировки узла 43 датчиков в горизонтальной плоскости предусмотрен другой, не показанный здесь индикаторный элемент, который при направлении первого ультразвукового датчика 42 на кромку 12 обработки светится зеленым светом. Выравнивание в горизонтальном направлении требуется только в исключительных случаях. Оно может производиться уже в заводских условиях, так как определяется размерами режущего аппарата 3. Левая боковая кромка режущего аппарата 3 сама по себе задает кромку 12 обработки. Поэтому обычно достаточно выровнять узел 43 датчиков в горизонтальном направлении относительно режущего аппарата 3. За счет того что второй ультразвуковой датчик 42’’ полностью ориентирован на убираемую культуру 5, сигнал может генерироваться простым и однозначным образом для опознавания кромки 12 обработки. Дальнейшая обработка сигнала датчиков осуществляется таким же образом, как и в описанном первом примере выполнения.
Блок 29 обработки данных может использоваться для дистанционного управления установочным устройством 45 установки высоты несущей стойки. За счет этого узел 43 датчиков может быть смещен в вертикальном направлении в соответствии с предварительно заданной программой юстировки. Его высотное положение устанавливается в зависимости от высоты убираемой растительности. При этом существенно, чтобы датчик был настроен на определенный заданный диапазон дальности. Установочное устройство 45 выполнено предпочтительно в виде силового цилиндра двухстороннего действия с возможностью управления электрическими средствами.
В альтернативном варианте индикаторное устройство 23 выполнено в виде дисплея, расположенного в кабине управления комбайна 2 и связанного с микропроцессором блока 29 обработки данных. Дисплей может использоваться и для других целей, в частности для индикации заданных режимов управления движением.

Группа изобретений относится к вспомогательному оборудованию сельскохозяйственных машин. Узел датчиков (УД) укреплен на режущем аппарате сельскохозяйственной машины с помощью несущей стойки. Имеются средства для самостоятельной ориентации УД на опорную точку или опорную линию с дистанционным перемещением УД в горизонтальном и/или вертикальном направлении и последующей юстировкой. Индикацию действительного положения или ориентации УД относительно кромки обработки поля осуществляют с помощью двухмерного индикаторного поля. Индикаторное устройство оснащено предназначенным для опознавания юстированного положения знаком опознавания, зависящим от положения сельскохозяйственной машины относительно кромки обработки поля. Группа изобретений обеспечивает для УД упрощенное определение и установку заданного положения юстировки. 2 н. и 17 з.п. ф-лы, 9 ил.
| DE 19716201 A1, 22.10.1998 | |||
| СПОСОБ ОЖИЖЕНИЯ ПОРОШКООБРАЗНОГО ЛЕКАРСТВЕННОГО ПРЕПАРАТА ДЛЯ ИНГАЛЯЦИИ, ИНГАЛЯТОР | 1995 |
|
RU2150298C1 |
| DE 9312542 U1, 18.11.1993 | |||
| DE 9207482 U1, 01.10.1992 | |||
| Следоуказатель к сельскохозяйственным агрегатам | 1991 |
|
SU1821065A1 |

