Изобретение относится к технике обнаружения скрытых металлосодержащих объектов и может быть использовано для поиска и идентификации подповерхностных объектов, находящихся в непроводящих или слабопроводящих средах.
Известен металлоискатель (патент США 4563645, МПК: G 01 N 27/72), содержащий генератор несущей частоты, индукционный преобразователь, первый усилитель, которые последовательно соединены между собой, причем индукционный преобразователь состоит из излучающей и двух встречно включенных приемных катушек, а также содержащий три детектора, два из которых детектируют квадратурные составляющие, два элемента памяти, цепь диодных переключателей, два диодных аттенюатора, фазовращатель, блок вывода.
Недостатками данного металлоискателя являются высокая потребляемая мощность в результате непрерывного режима работы генератора несущей частоты; низкая чувствительность, обусловленная балансировкой по входу, за счет чего возникают более высокие гармоники, которые ограничивают коэффициент усиления; отсутствие распознавания объектов, поскольку имеет место селекция только по амплитуде.
Наиболее близким техническим решением к заявляемому является металлоискатель (авторское свидетельство СССР 1195803, МПК: G 01 V 3/11), содержащий генератор несущей частоты, индукционный преобразователь, первый усилитель, синхронный детектор, первый и второй интеграторы и индикатор, причем первый усилитель выходом подключен ко входу синхронного детектора, а первый интегратор своим входом соединен с выходом синхронного детектора. Генератор несущей частоты, индукционный преобразователь, первый усилитель, синхронный детектор, индикатор последовательно соединены между собой. Опорный вход синхронного детектора подключен к выходу генератора несущей частоты. Индукционный преобразователь состоит из двух встречно включенных излучающих, компенсационой и сигнальной катушек. Также рассматриваемое известное техническое решение содержит второй синхронный детектор, фазовращатель, управляемый аттенюатор и управляемый фазовращатель. При этом выход первого усилителя соединен с входом второго синхронного детектора, выход второго синхронного детектора подключен ко входу второго интегратора, последовательно соединенные управляемый фазовращатель, управляемый аттенюатор и компенсационная катушка индукционного преобразователя подключены к выходу генератора несущей частоты, управляющие входы управляемого фазовращателя и управляемого аттенюатора подключены соответственно к выходам первого и второго интеграторов, а опорный вход второго синхронного детектора подключен через фазовращатель к выходу генератора несущей частоты. Излучающие катушки индукционного преобразователя подключены к выходу генератора несущей частоты, а сигнальная катушка индукционного преобразователя подключена к последовательно соединенным первому усилителю, синхронному детектору, опорный вход которого подключен к выходу генератора несущей частоты, и индикатору.
Недостатками этого технического решения являются высокая потребляемая мощность, обусловленная непрерывным режимом работы генератора несущей частоты; низкая чувствительность в результате балансировки по входу; отсутствие распознавания объекта, селекция производится только по амплитуде.
Техническим результатом изобретения является: снижение потребляемой мощности, увеличение чувствительности, возможность распознавания объектов, а именно селекция металлов на цветные и черные (ферромагнитные).
Технический результат достигается тем, что металлоискатель содержит генератор несущей частоты, индукционный преобразователь, первый усилитель, синхронный детектор, первый и второй интеграторы и индикатор, причем первый усилитель выходом подключен ко входу синхронного детектора, а первый интегратор своим входом соединен с выходом синхронного детектора, генератор зондирующих импульсов, три делителя частоты, две цепи задержки, схему И, модулятор, две дифференцирующие цепочки, второй усилитель, демодулятор, третий усилитель, причем индукционный преобразователь состоит из двух резонансных контуров, включающих излучающую и частично перекрывающую ее приемную катушки и цепи балансировки, при этом вход разрешения генератора несущей частоты и входы разрешения первого, второго и третьего делителей частоты подключены к выходу генератора зондирующих импульсов, первый делитель частоты информационным входом подключен к выходу генератора несущей частоты, а информационные входы второго и третьего делителей частоты соединены соответственно с прямым и инверсным выходами первого делителя частоты, прямой выход второго делителя частоты соединен со входом индукционного преобразователя, последовательно соединенные первый усилитель, синхронный детектор, первый интегратор подключены к выходу индукционного преобразователя, к выходу первого интегратора подключены последовательно соединенные модулятор, первая дифференцирующая цепочка, второй усилитель, демодулятор, второй интегратор, вторая дифференцирующая цепочка, третий усилитель и индикатор, первая и вторая цепи задержки своими входами соединены с выходом генератора зондирующих импульсов, схема И одним входом соединена с прямым выходом третьего делителя частоты, а другим входом соединена с выходом второй цепи задержки, выход схемы И подключен к опорному входу синхронного детектора, опорный вход модулятора подключен к выходу генератора зондирующих импульсов, а опорный вход демодулятора соединен с выходом первой цепи задержки.
Сущность изобретения поясняется нижеследующим описанием и прилагаемыми к нему фигурами, где на Фиг.1 представлена блок-схема металлоискателя, на Фиг. 2 - индукционный преобразователь.
Снижение потребляемой мощности, увеличение чувствительности и распознавание объектов, то есть селекция металлосодержащих объектов на цветные и черные, стало возможным благодаря импульсному зондированию вмещающей среды с несущей частотой заполнения, использованию двух катушек, излучающей и частично перекрывающей ее приемной, в индукционном преобразователе и автобалансировки по постоянному сигналу.
Снижение потребляемой мощности и увеличение чувствительности происходит за счет того, что зондирование среды производится не в непрерывном режиме, как в известных технических решениях, а короткими импульсами с заполнением несущей частотой. Это позволяет значительно уменьшить потребляемую мощность, так как основная часть потребляемой мощности расходуется на излучение. Также импульсное зондирование среды повышает помехозащищенность: обработка сигнала производится синхронно с действием зондирующего импульса, что существенно сужает частотный диапазон помех и соответственно позволяет увеличить усиление всего приемного тракта. Этому также способствует автобалансировка по постоянному сигналу, так как позволяет избежать возникновения высших гармоник и задать линейный режим усиления.
Распознавание типа металла стало возможным за счет применения в индукционном преобразователе одной приемной катушки, нулевой баланс которой достигается частичным перекрытием с излучающей катушкой и цепью балансировки, и применением синхронного детектирования. Зона максимальной чувствительности индукционного преобразователя локализована в области перекрытия излучающей и приемной катушек, где величина магнитного потока максимальна. Именно в этой области регистрируется объект, что позволяет избежать неоднозначности, которая имеет место в известных технических решениях при определении местонахождения объекта, а именно над какой из приемных или излучающих катушек он находится, сузить зону локализации объекта и получить однополярный сигнал. За счет синхронного детектирования определяется величина и знак сигнала отклика от объекта. К примеру, если использовать в синхронном детекторе опорный сигнал, квадратурный относительно излучаемого, и объект находится в зоне максимальной чувствительности индукционного преобразователя, то сигнал от объекта, содержащего цветной металл, будет положителен, а от объекта, содержащего черный металл, - отрицателен.
Металлоискатель содержит (Фиг.1): генератор зондирующих импульсов 1, генератор несущей частоты 2, первый, второй и третий делители частоты 3, 4 и 5, индукционный преобразователь 6, первый усилитель 7, синхронный детектор 8, первую и вторую цепи задержки 9 и 10, схему И 11, первый интегратор 12, модулятор 13, первую дифференцирующую цепочку 14, второй усилитель 15, демодулятор 16, второй интегратор 17, вторую дифференцирующую цепочку 18, третий усилитель 19, индикатор 20.
Генератор зондирующих импульсов 1 и генератор несущей частоты 2 являются стандартными элементами (Б.И. Горшков, Радиоэлектронные устройства. М.: Радио и связь, 1984 г. , с. 254). Выход генератора зондирующих импульсов (скважность которых, например, 1 (режим излучения) к 10 (режим молчания)) подключен ко входу разрешения генератора несущей частоты 2.
Первый, второй и третий делители частоты, например, на два, 3, 4 и 5 представляют собой стандартные элементы (П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, 1983 г., т.1, с.546), входы разрешения которых соединены с выходом генератора зондирующих импульсов 1. Информационный вход первого делителя частоты 3 подключен к выходу генератора несущей частоты 2, а информационные входы второго делителя частоты 4 и третьего делителя частоты 5 подключены соответственно к прямому и инверсному выходам первого делителя частоты 3.
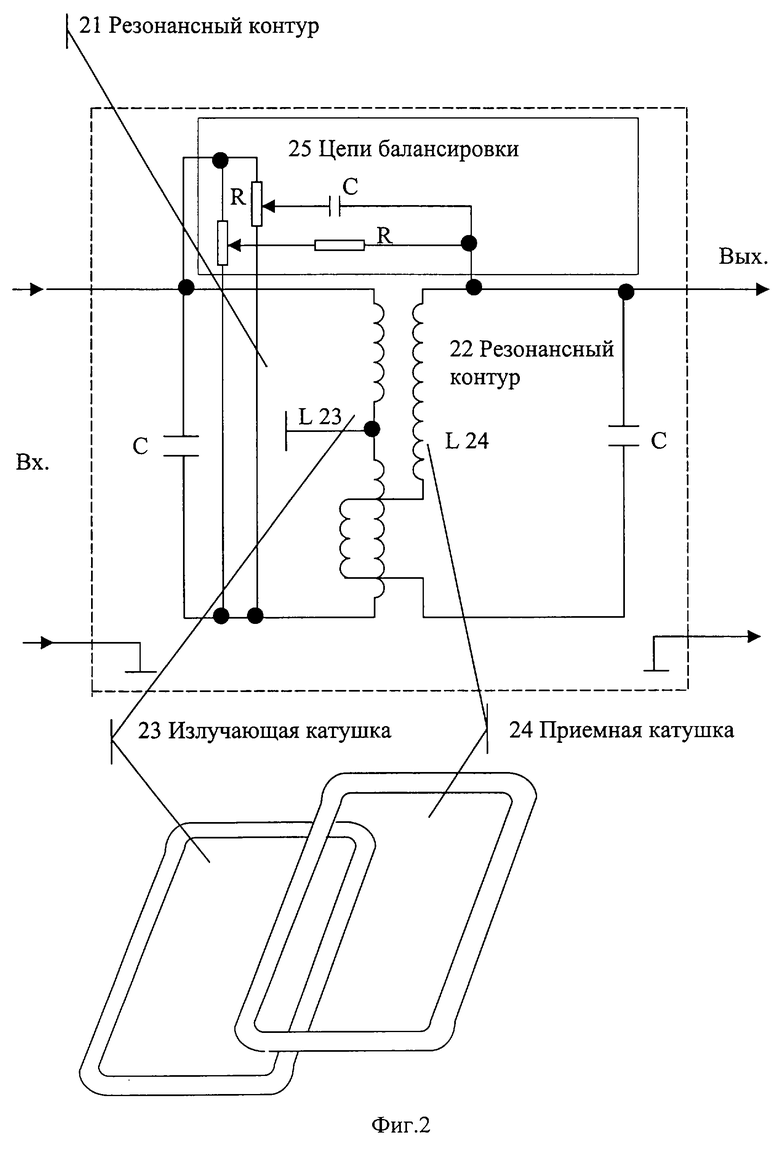
Индукционный преобразователь 6 (Фиг.2) содержит: два резонансных контура 21 и 22, настроенных на частоту, равную по величине одной четвертой частоты генератора несущей частоты 2 (Фиг.1), в которых в качестве индуктивностей используются излучающая L 23 и приемная L 24 катушки, и цепи балансировки 25. Грубая балансировка осуществляется за счет частичного перекрытия излучающей и приемной катушек 23 и 24, более точная - цепями балансировки 25.
Для примера на Фиг.2 схематично показаны излучающая L 23 и приемная L 24 катушки и их пространственное расположение. Относительные размеры катушек составляют 1,5•1, а относительная величина зоны перекрытия для данных соотношений размеров, в области которой достигается минимальный сигнал разбаланса на выходе индукционного преобразователя 6, составляет около 0,2.
Количество витков и размеры катушек рассчитываются исходя из условий поставленной задачи, например для обнаружения мелких объектов (размером около 1 см3) на расстоянии до 30 см при частоте излучения излучающей катушки 23 около 30 кГц и напряжении питания около 12 В линейные размеры излучающей и приемной катушек 23 и 24 составляют 15 см•10 см и количество витков - соответственно 30 и 120, при этом к общей шине подсоединяется 15 виток излучающей катушки 23.
Величина емкостей С рассчитывается так, чтобы обеспечить резонанс (Фиг. 2).
Цепи балансировки рассчитаны таким образом, чтобы обеспечить диапазон регулировки около 10% от величины сигнала на вход излучающей катушки 23.
Минимальный сигнал разбаланса на выходе приемной катушки 24 составляет около 2% от сигнала на входе индукционного преобразователя 6, который достигается грубой балансировкой, то есть за счет перекрытия излучающей и приемной катушек 23 и 24. Дальнейшая балансировка посредством цепей балансировки 25 позволяет снизить разбаланс до 0,1%, что составляет 2% от максимального диапазона срабатывания автобалансировки.
Для увеличения мощности излучения излучающая катушка 23 частично подключается к источнику сигнала, что также позволяет иметь парафазный сигнал для цепей балансировки 25 непосредственно в индукционном преобразователе 6.
Выход индукционного преобразователя 6 последовательно соединен со стандартными элементами: первым усилителем 7, в качестве которого применен усилитель переменного тока (П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, 1993 г., т. 1, с.185), синхронным детектором 8, первым интегратором 12 (П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, 1993 г., т. 1, с. 237), модулятором 13, первой дифференцирующей цепочкой 14 (П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, 1993 г., т. 1, с.32), вторым усилителем 15, в качестве которого применен усилитель переменного тока (П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, 1993 г., т. 1, с.185), демодулятором 16, вторым интегратором 17 (П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, 1993 г., т. 1, с.237), второй дифференцирующей цепочкой 18 (П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, 1993 г., т. 1, с.32), усилителем 19, в качестве которого применен усилитель постоянного тока (П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, 1993 г., т. 1, с.185), индикатором 20. В качестве синхронного детектора 8, модулятора 13, демодулятора 16 могут быть использованы управляемые аналоговые ключи (П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, 1993 г., т. 1, с.151). Индикатором может служить, например, стандартный промышленный микроамперметр либо любое другое средство для вывода информации.
Стандартными элементами являются первая и вторая цепи задержки 9 и 10 (П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, 1993 г., т. 1, с.32), входы которых соединены с выходом генератора зондирующих импульсов 1. Они использованы для устранения переходных процессов, возникающих при запуске индукционного преобразователя 6 и работе модулятора 13.
Стандартная схема И 11 (П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, 1993 г., т. 1, с.163) одним входом соединена с прямым выходом третьего делителя частоты 5, а другим входом соединена с выходом второй цепи задержки 10. Выход схемы И 11 подключен к опорному входу синхронного детектора 8. Опорный вход модулятора 13 подключен к выходу генератора зондирующих импульсов 1, а опорный вход демодулятора 16 соединен с выходом первой цепи задержки 9.
Металлоискатель работает следующим образом. Генератор зондирующих импульсов 1 вырабатывает зондирующие импульсы, которые управляют работой всей схемы. Сигнал с выхода генератора зондирующих импульсов 1 разрешает работу генератору несущей частоты 2 и первому, второму и третьему делителям частоты 3, 4 и 5. Сигнал со второго делителя частоты 4, промодулированный генератором зондирующих импульсов 1, поступает на излучающую катушку 23 индукционного преобразователя 6, излучение которой воздействует на объект. Сигнал отклика от объекта регистрируется приемной катушкой 24 индукционного преобразователя 6, усиливается первым усилителем 7, детектируется синхронно с сигналом с третьего делителя частоты 5, который сдвинут на 90o по отношению к излучаемому, синхронным детектором 8 и интегрируется первым интегратором 12. Постоянную интегрирования выбирают в соответствии со временем нарастания сигнала при появлении объекта. Постоянный сигнал с выхода первого интегратора 12 модулятор 13 преобразует в импульсный. Далее сигнал через первую дифференцирующую цепочку 14 поступает на вход второго усилителя 15 и присутствует на входе до тех пор, пока не отработается первой дифференцирующей цепочкой 14, постоянная дифференцирования которой соответствует времени фиксации объекта. Усиленный импульсный сигнал демодулятор 16 демодулирует, далее демодулированный сигнал интегрируется вторым интегратором 17 и через вторую дифференцирующую цепочку 18 поступает на вход третьего усилителя 19 в течение времени фиксации объекта. Мощность и тип объекта отображаются на индикаторе 20.
Если объект находится в зоне индукционного преобразователя 6 больше заданного времени, то схема отработает отклик как сигнал разбаланса, произойдет автобалансировка и металлоискатель будет готов к обнаружению следующего объекта.
По сравнению с известными техническими решениями использование в заявляемом техническом решении амплитудной импульсной модуляции несущей частоты позволило как минимум в три раза снизить мощность потребления, увеличить примерно в 1,5 раза дальность обнаружения и повысить помехозащищенность. Использование в индукционном преобразователе одной приемной и одной излучающей катушек с последующим применением синхронного детектирования сигнала позволило надежно дифференцировать цветные и черные металлы.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕТАЛЛОИСКАТЕЛЬ | 2006 |
|
RU2366982C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ МАЛОРАЗМЕРНЫХ МЕТАЛЛИЧЕСКИХ ВКЛЮЧЕНИЙ В ИЗДЕЛИЯХ ИЗ КОМПОЗИТНЫХ МАТЕРИАЛОВ | 2019 |
|
RU2710080C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2539826C2 |
| Индикаторный гиростабилизатор | 2023 |
|
RU2796398C1 |
| Индикаторный гиростабилизатор | 2024 |
|
RU2829814C1 |
| Устройство импульсной локации на основе автодина | 2020 |
|
RU2755202C1 |
| Индикаторный гиростабилизатор | 2024 |
|
RU2818233C1 |
| Компенсационный акселерометр | 2019 |
|
RU2708716C1 |
| Акселерометр | 2023 |
|
RU2793845C1 |
| Акселерометр | 2024 |
|
RU2818692C1 |
Изобретение относится к технике обнаружения скрытых металлосодержащих объектов и может быть использовано для поиска и идентификации подповерхностных объектов, находящихся в непроводящих или слабопроводящих средах. Металлоискатель содержит генератор несущей частоты, индукционный преобразователь, первый усилитель, синхронный детектор, первый и второй интеграторы и индикатор. Первый усилитель выходом подключен ко входу синхронного детектора, а первый интегратор своим входом соединен с выходом синхронного детектора. Металлоискатель также содержит генератор зондирующих импульсов, три делителя частоты, две цепи задержки, схему И, модулятор, две дифференцирующие цепочки, второй усилитель, демодулятор, третий усилитель. Индукционный преобразователь состоит из двух резонансных контуров, включающих излучающую и частично перекрывающую ее приемную катушки и цепи балансировки. Вход разрешения генератора несущей частоты и входы разрешения первого, второго и третьего делителей частоты подключены к выходу генератора зондирующих импульсов, первый делитель частоты информационным входом подключен к выходу генератора несущей частоты, а информационные входы второго и третьего делителей частоты соединены соответственно с прямым и инверсным выходами первого делителя частоты, прямой выход второго делителя частоты соединен со входом индукционного преобразователя, последовательно соединенные первый усилитель, синхронный детектор, первый интегратор подключены к выходу индукционного преобразователя, к выходу первого интегратора подключены последовательно соединенные модулятор, первая дифференцирующая цепочка, второй усилитель, демодулятор, второй интегратор, вторая дифференцирующая цепочка, третий усилитель и индикатор, первая и вторая цепи задержки своими входами соединены с выходом генератора зондирующих импульсов, схема И одним входом соединена с прямым выходом третьего делителя частоты, а другим входом соединена с выходом второй цепи задержки, выход схемы И подключен к опорному входу синхронного детектора, опорный вход модулятора подключен к выходу генератора зондирующих импульсов, а опорный вход демодулятора соединен с выходом первой цепи задержки. Технический результат: снижение мощности потребления, увеличение дальности обнаружения и повышение помехозащищенности, возможность надежного дифференцирования цветных и черных металлов. 2 ил.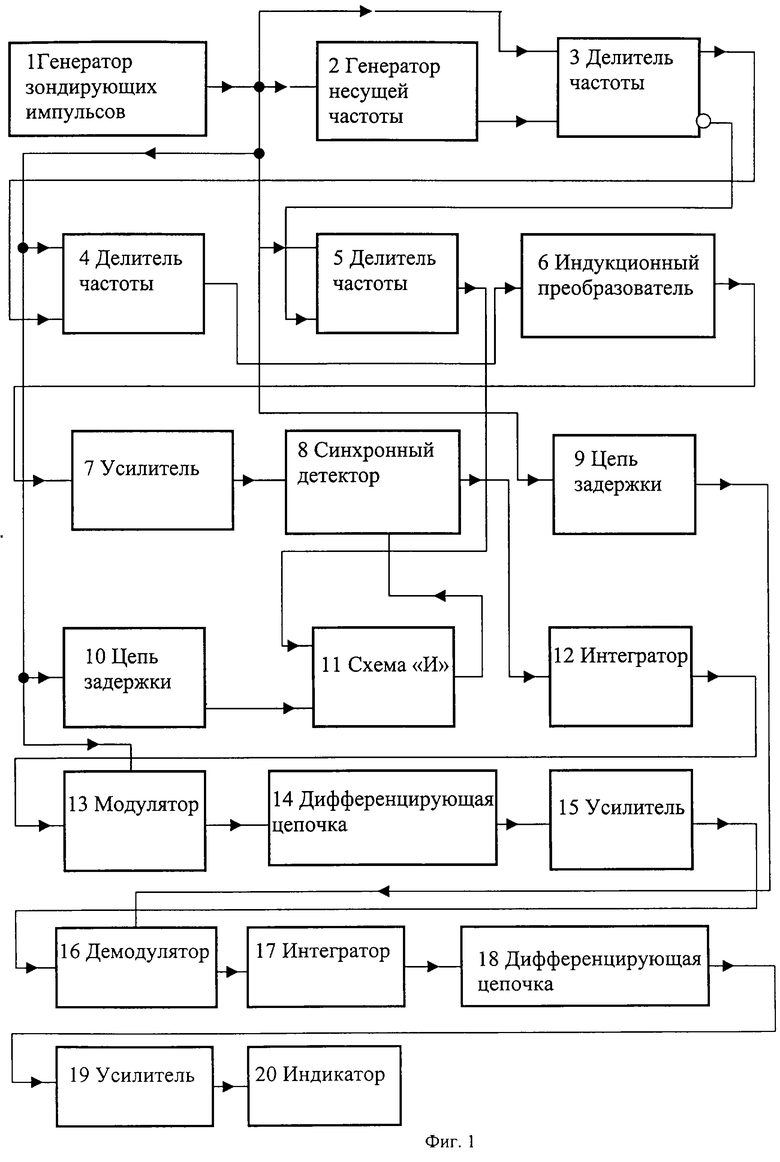
Металлоискатель, содержащий генератор несущей частоты, индукционный преобразователь, первый усилитель, синхронный детектор, первый и второй интеграторы и индикатор, причем первый усилитель выходом подключен ко входу синхронного детектора, а первый интегратор своим входом соединен с выходом синхронного детектора, отличающийся тем, что дополнительно содержит генератор зондирующих импульсов, три делителя частоты, две цепи задержки, схему И, модулятор, две дифференцирующие цепочки, второй усилитель, демодулятор, третий усилитель, причем индукционный преобразователь состоит из двух резонансных контуров, включающих излучающую и частично перекрывающую ее приемную катушки и цепи балансировки, при этом вход разрешения генератора несущей частоты и входы разрешения первого, второго и третьего делителей частоты подключены к выходу генератора зондирующих импульсов, первый делитель частоты информационным входом подключен к выходу генератора несущей частоты, а информационные входы второго и третьего делителей частоты соединены соответственно с прямым и инверсным выходами первого делителя частоты, прямой выход второго делителя частоты соединен со входом индукционного преобразователя, последовательно соединенные первый усилитель, синхронный детектор, первый интегратор подключены к выходу индукционного преобразователя, к выходу первого интегратора подключены последовательно соединенные модулятор, первая дифференцирующая цепочка, второй усилитель, демодулятор, второй интегратор, вторая дифференцирующая цепочка, третий усилитель и индикатор, первая и вторая цепи задержки своими входами соединены с выходом генератора зондирующих импульсов, схема И одним входом соединена с прямым выходом третьего делителя частоты, а другим входом соединена с выходом второй цепи задержки, выход схемы И подключен к опорному входу синхронного детектора, опорный вход модулятора подключен к выходу генератора зондирующих импульсов, а опорный вход демодулятора соединен с выходом первой цепи задержки.
| Металлоискатель | 1984 |
|
SU1195803A1 |
| Металлоискатель | 1984 |
|
SU1190330A1 |
| US 4563645, 07.01.1986 | |||
| US 4300097, 10.11.1991. | |||

