Изобретение относится к электротехнике, а именно к области электрических машин с бесконтактной коммутацией якорной обмотки, и может быть использовано в различных системах преобразовательной техники и автоматики.
Известен двигатель постоянного тока с многофазной обмоткой [1], выполненный по четырехлучевой схеме с общей точкой подключения секций обмотки двигателя к одной из шин источника питания.
Недостатками такого двигателя являются его избыточность по меди из-за использования четырехсекционной обмотки, что ведет к увеличению веса и габаритов двигателя и снижению его надежности.
Наиболее близким по технической сущности к предлагаемому устройству является бесконтактный электродвигатель постоянного тока [2], принятый за прототип. Он выполнен с коммутацией секций якорной обмотки без взаимного перекрытия через полупроводниковые усилители по сигналам датчика положения ротора, каждый канал которого снабжен двумя гальванически развязанными цепями, а ко входу каждого усилителя подключены последовательно-встречно соединенные цепи соседних по очередности каналов датчика.
К недостаткам прототипа можно отнести необходимость во вторичных источниках напряжения, сложность конструкции (наличие моточных узлов, дросселей, согласующих трансформаторов), что приводит к увеличению веса и габаритов электродвигателя и уменьшению его надежности.
Задачей, на решение которой направлено создание предлагаемого устройства, является повышение технологичности и надежности электродвигателя.
Поставленная задача решается тем, что в бесконтактный электродвигатель постоянного тока, содержащий коммутатор на транзисторных усилителях с выходами для подключения к секциям обмотки электродвигателя, датчик положения ротора, предназначенный для подключения секций обмотки электродвигателя к источнику питания, дополнительно введен логический преобразователь, выходы которого соединены с входами коммутатора, а входы подключены к выходам соответствующих трех логических элементов "ИСКЛЮЧАЮЩЕЕ ИЛИ", первые входы которых связаны с датчиком положения ротора, а объединенные вторые входы подключены к одному из полюсов вспомогательного источника напряжения. Логический преобразователь выполнен на основе трех инверторов и трех логических элементов "2И-НЕ", "2ИЛИ-НЕ", при этом входы инверторов, соединенные с первыми входами логических элементов "2И-НЕ", "2ИЛИ-НЕ", служат входами логического преобразователя, их вторые входы соединены с выходами соответствующих инверторов, а выходы указанных логических элементов "2И-НЕ", "2ИЛИ-НЕ" служат выходами логического преобразователя. Также предусмотрено, что в бесконтактный электродвигатель постоянного тока может быть дополнительно введен потенциальный узел управления электродвигателем, а логический преобразователь выполнен на основе трех инверторов и трех логических элементов "3И-НЕ", "3ИЛИ-НЕ", при этом входы инверторов, соединенные с первыми входами логических элементов "3И-НЕ", "3ИЛИ-НЕ", служат входами логического преобразователя, их вторые входы соединены с выходами соответствующих инверторов, объединенные третьи входы логических элементов "3И-НЕ", "3ИЛИ-НЕ" подключены к потенциальному узлу управления электродвигателем, а выходы указанных логических элементов служат выходами логического преобразователя.
На фиг. 1 представлена функционально-структурная схема бесконтактного электродвигателя постоянного тока; на фиг.2 приведены эпюры напряжений работы логического преобразователя, выполненного на основе трех инверторов и трех логических элементов "2И-НЕ", ("3И-НЕ"). На фиг.3 приведены эпюры напряжений работы логического преобразователя, выполненного на основе трех инверторов и трех логических элементов "2ИЛИ-НЕ", ("3ИЛИ-НЕ").
Бесконтактный электродвигатель постоянного тока содержит коммутатор 1 на транзисторных усилителях с выходами для подключения к секциям обмотки 2 электродвигателя. Выходы датчика положения ротора 3 связаны с первыми входами соответствующих трех логических элементов "ИСКЛЮЧАЮЩЕЕ ИЛИ" 4, объединенные вторые входы которых подключены к одному из полюсов вспомогательного источника напряжения 8.
Логический преобразователь 5 выполнен на трех инверторах 6 и трех однотипных логических элементах 7 "2И-НЕ" ("3И-НЕ") или "2ИЛИ-НЕ" ("3ИЛИ-НЕ"). Входы инверторов 6, соединенные с первыми входами однотипных логических элементов 7 "2И-НЕ" ("3И-НЕ") или "2ИЛИ-НЕ" ("3ИЛИ-НЕ"), служат входами логического преобразователя 5 и подключены к соответствующим выходам логических элементов "ИСКЛЮЧАЮЩЕЕ ИЛИ" 4. Выходы логических элементов 7 "2И-НЕ" ("3И-НЕ") или "2ИЛИ-НЕ" ("3ИЛИ-НЕ"), являющиеся выходами логического преобразователя 5, соединены со входами коммутатора 1.
При использовании в логическом преобразователе 5 логических элементов 7 "3И-НЕ" или "3ИЛИ-НЕ" их объединенные третьи входы подключаются к потенциальному узлу управления электродвигателем 9.
Бесконтактный электродвигатель постоянного тока работает следующим образом.
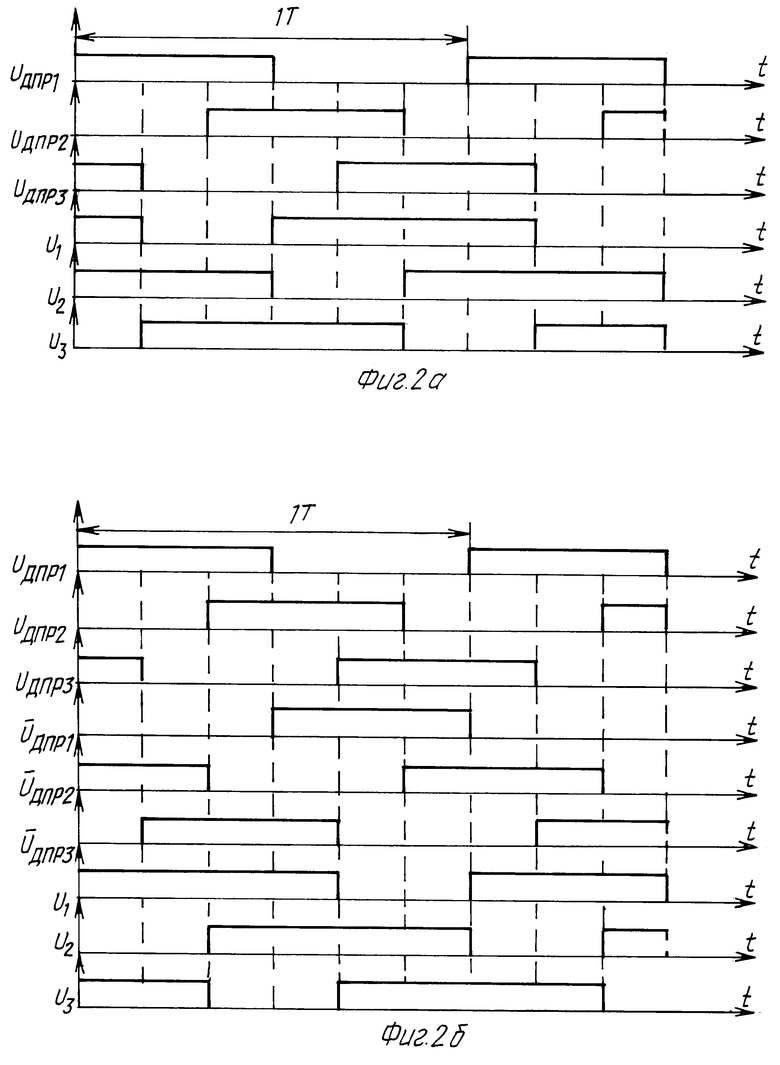
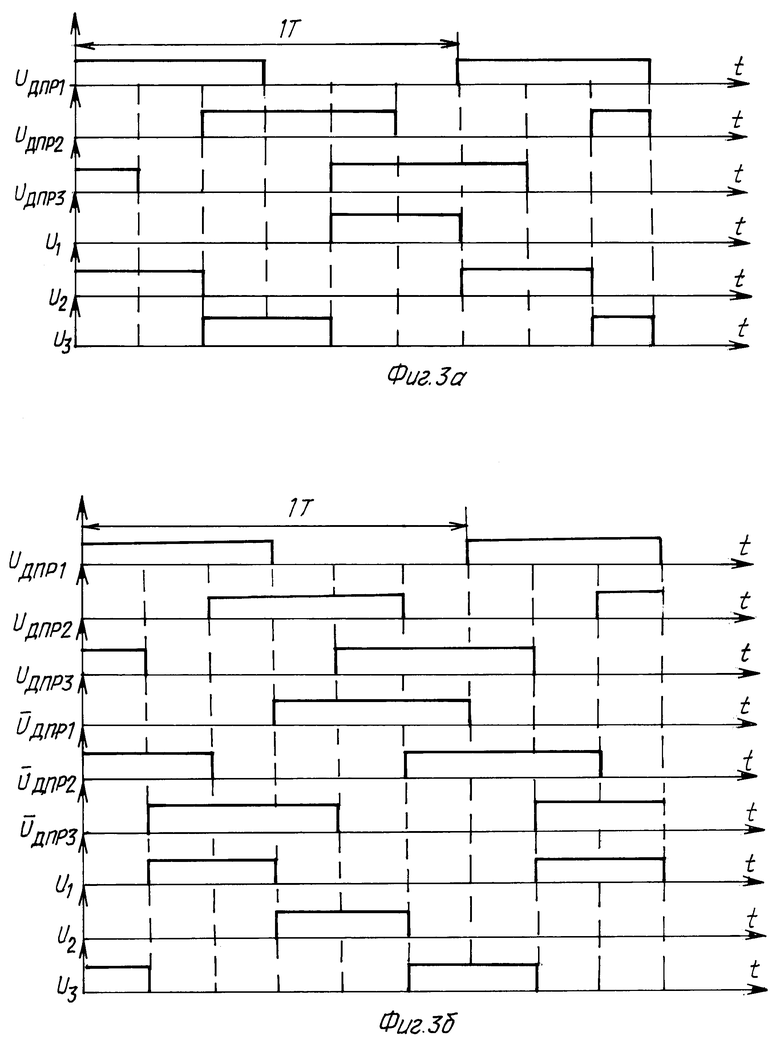
При включении питания за счет подключения датчиком положения ротора 3 одной из секций обмотки 2 электродвигателя к источнику питания происходит взаимодействие поля статора с магнитным потоком ротора. Вал электродвигателя начинает вращаться. При этом с датчика положения ротора 3 три последовательности импульсов типа меандр VДПР1, VДПР2, VДПР3 длительностью 180 электрических градусов и сдвинутых друг относительно друга на 120 электрических градусов поступают на соответствующие входы логического преобразователя 5. Логический преобразователь 5 формирует три последовательности импульсов типа меандр V1, V2, V3 длительностью 120 электрических градусов, приведенных на фиг.2а, 2б, 3а, 3б и сдвинутых друг относительно друга также на 120 электрических градусов.
На фиг. 2а, 3а приведены эпюры напряжений работы логического преобразователя 5, выполненного на трех инверторах 6 и однотипных трех логических элементах 7 соответственно "2И-НЕ" ("3И-НЕ"), "2ИЛИ-НЕ" ("3ИЛИ-НЕ"), с неинвертированием сигналов датчика положения ротора 3.
На фиг. 2б, 3б приведены эпюры напряжений работы логического преобразователя 5 с инвертированием сигналов датчика положения ротора 3.
При выполнении логического преобразователя 5 на основе трех инверторов 6 и трех однотипных логических элементов 7 "ЗИ-НЕ" или "3ИЛИ-НЕ" их третьи входы объединены и подключены к потенциальному узлу управления электродвигателем 9, обеспечивающему режимы "Работа" или "Стоп".
В соответствии с приведенными на фиг.2а, 2б, 3а, 3б напряжениями V1, V2, V3, действующими на выходах логического преобразователя 5, транзисторными усилителями коммутатора 1 секции обмотки 2 электродвигателя оказываются подключенными к источнику питания в определенной последовательности. При этом ток в секциях обмотки 2 статора, взаимодействуя с магнитным потоком ротора, создает на валу электродвигателя вращающий момент. Ротором производится переключение магнитоуправляемых микросхем датчика положения ротора 3, и, следовательно, транзисторных усилителей коммутатора 1. За счет подключения секций обмотки 2 электродвигателя к источнику питания в определенной последовательности, магнитодвижущая сила статора меняет свое положение и поворачивется в пространстве на угол 120 электрических градусов, обеспечивающий сохранение вращающего момента. При равенстве вращающего момента и сопротивления на валу электродвигателя частота его вращения становится постоянной.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Заявка ФРГ 2403432, кл. Н 02 К 29/02, 1975 г.
2. Авторское свидетельство СССР 365780, кл. Н 02 К 29/02, опубл. 08.01.1973, бюл. 6 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ БЕСКОНТАКТНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2023343C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2000 |
|
RU2202147C2 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2007 |
|
RU2369003C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ | 2001 |
|
RU2199752C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ИЗБЫТОЧНОЙ МОЩНОСТИ СОЛНЕЧНОЙ БАТАРЕИ | 2001 |
|
RU2211480C2 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2009 |
|
RU2408127C1 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ | 2001 |
|
RU2217790C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ТРАНСФОРМАЦИИ ОБМОТОК АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2000 |
|
RU2191397C2 |
| ПОГРУЖНОЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2000 |
|
RU2176125C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ИЗБЫТОЧНОЙ МОЩНОСТИ СОЛНЕЧНОЙ БАТАРЕИ | 2000 |
|
RU2199808C2 |
Изобретение относится к электротехнике, а именно к электрическим машинам с бесконтактной коммутацией. Технический результат изобретения, заключающийся в повышении технологичности и надежности электродвигателя, достигается путем того, что в бесконтактный электродвигатель постоянного тока, содержащий коммутатор на транзисторных усилителях с выходами для подключения к секциям обмотки электродвигателя, датчик положения ротора, предназначенный для подключения секций обмотки электродвигателя к источнику питания, дополнительно введен логический преобразователь, выходы которого соединены с входами коммутатора, а входы подключены к выходам соответствующих трех логических элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, первые входы которых связаны с датчиком положения ротора, а объединенные вторые входы подключены к одному из полюсов вспомогательного источника напряжения. 2 з.п. ф-лы, 3 ил.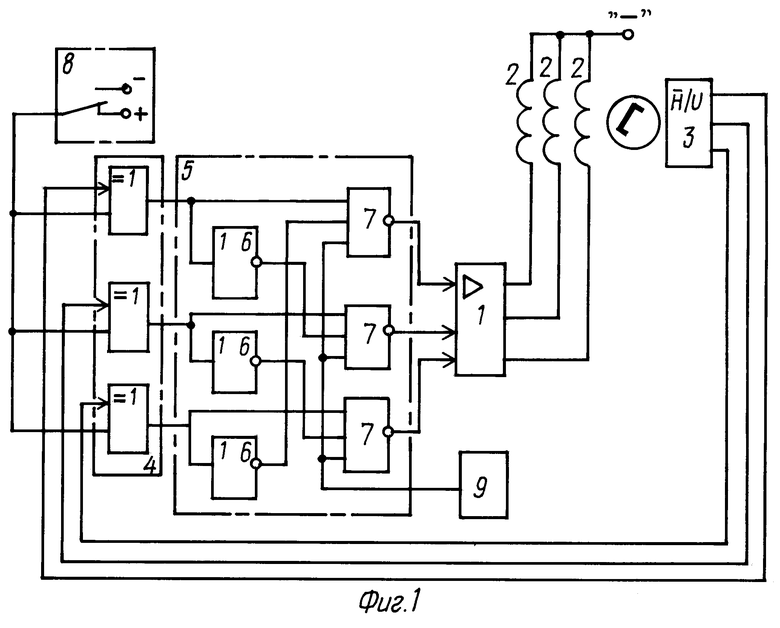
| Устройство согласования для бесконтактного двигателя постоянного тока | 1978 |
|
SU748700A1 |
| РЕВЕРСИВНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1989 |
|
RU1711635C |
| СПОСОБ ЗАПУСКА ДИЗЕЛЬНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2403432C2 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ | 1994 |
|
RU2083955C1 |

