Изобретение относится к электротехнике, области электрических машин с бесконтактной коммутацией якорной обмотки и может быть использовано в различных системах автоматики и преобразовательной техники, в частности, в медицинской технике.
Известные технические решения обладают невысокой надежностью и достаточной сложностью.
Устройство для управления бесконтактным электродвигателем постоянного тока по патенту РФ 2023342, кл. 5 Н 02 Р 6/02, 1994 г. содержит мостовой коммутатор на транзисторах с выходами для подключения якорной обмотки бесконтактного электродвигателя, датчик положения ротора, выходы которого соединены с первыми выводами входных логических элементов декодера, вторые выводы которых объединены и подключены к задатчику направления вращения, узел токоограничения, вход которого подключен к общей точке соединения измерительного резистора и одного из силовых входов мостового коммутатора, а выход соединен с узлом управления частотой вращения электродвигателя с п-входами и декодер, выполненный на трех инверторах и шести логических элементах ЗИ-НЕ или ЗИЛИ-НЕ.
Недостатками указанного технического решения является относительная сложность связей, снижающая надежность устройства.
Устройство для управления п-фазным БДПТ по авторскому свидетельству СССР 782070, кл. Н 02 К 29/02, 1980 г. содержит коммутатор, счетчик импульсов, импульсный датчик частоты вращения, датчик углового положения ротора, два логических элемента И, один логический элемент ИЛИ, триггер, фазовый дискриминатор с корректирующим устройством, генератор, делитель частоты, соединенные соответствующим образом.
Указанное устройство обеспечивает ступенчатый запуск электродвигателя дискретной частотой, формируемой счетчиком, переключаемого импульсами с датчика положения ротора до момента подключения первой из фаз БДПТ к источнику питания. Затем счетчик импульсов переключается от импульсного датчика частоты вращения, частота которого увеличивается по мере разгона электродвигателя. Электродвигатель разгоняется до момента равенства частот импульсного датчика и опорной частоты генератора, после чего дискриминатором поддерживается вращение электродвигателя с точностью, определяемой стабильностью генератора.
Недостатками указанного технического решения являются сложный алгоритм пуска, сложность функциональных связей и длительное время разгона.
Наиболее близким по технической сущности является схема управления выходными буферами по каталогу фирмы МОТОРОЛА, США, 1996г., реализованная в микросхеме МС 33035. Данное техническое решение содержит выходные буферы (коммутатор) на транзисторах, к выходам которого подключены якорные обмотки бесконтактного электродвигателя, датчик положения ротора, выходы которого подключены к соответствующим входам схемы управления выходными буферами с узлом токоограничения, вход генератора которого подключен к точке соединения резистора Rт и конденсатора Ст цепи токоограничения, второй вывод резистора Rт соединен с положительным полюсом источника опорного напряжения схемы управления выходными буферами, а второй вывод указанного конденсатора соединен с общей шиной источника питания, при этом вход 9 токоограничения подключен к общей точке измерительного резистора и одного из силовых входов выходных буферов.
Управление частотой вращения электродвигателя осуществляется переменным резистором, крайние выводы которого подключены между общей шиной питания и положительным полюсом источника опорного напряжения схемы управления выходными буферами, а средний вывод переменного резистора соединен с входом задатчика частоты вращения схемы управления выходными буферами.
Недостатками данного технического решения являются невысокая стабильность, а также невысокая надежность устройства из-за задатчика частоты вращения, выполненного в виде переменного резистора.
Задачей, на решение которой направлено предлагаемое изобретение, является увеличение стабильности частоты вращения бесконтактного электродвигателя и повышение его надежности.
Поставленная задача решается тем, что бесконтактный электропривод постоянного тока, содержащий коммутатор на транзисторах, выходами связанный с якорной обмоткой бесконтактного электродвигателя, входящего в электропривод, датчик положения ротора, выходы которого соединены с соответствующими входами схемы управления мостовым коммутатором с узлом токоограничения, вход генератора которого подключен к точке соединения резистора и конденсатора цепи узла токоограничения, второй вывод указанного резистора соединен с положительным полюсом источника опорного напряжения схемы управления мостовым коммутатором, а второй вывод указанного конденсатора связан с общей шиной источника питания, при этом вход узла токоограничения подключен к общей точке измерительного резистора и одного из силовых входов мостового коммутатора, дополнительно содержит датчик частоты вращения, включающий диск с перфорацией по периметру, жестко закрепленный на валу бесконтактного электродвигателя, с одной стороны указанного диска установлен источник излучения, а с другой стороны - фотоприемник, подключенный к усилителю-формирователю частоты вращения электродвигателя, первый и второй формирователи импульсов, частотно-фазовый компаратор с двумя входами и одним выходом, соединенным с входом задатчика частоты вращения схемы управления мостовым коммутатором, при этом один вход частотно-фазового компаратора подключен к выходу первого формирователя импульсов, вход которого связан с выходом датчика частоты вращения, а второй вход частотно-фазового компаратора связан с выходом второго формирователя импульсов, на вход которого поступает задающая частота управления электроприводом.
Работа бесконтактного электропривода поясняется чертежами.
На фиг.1 приведена функционально-структурная схема бесконтактного электропривода с оптоэлектронным датчиком частоты вращения электродвигателя, задающей частотой управления и частотно-фазовым компаратором (дискриминатором).
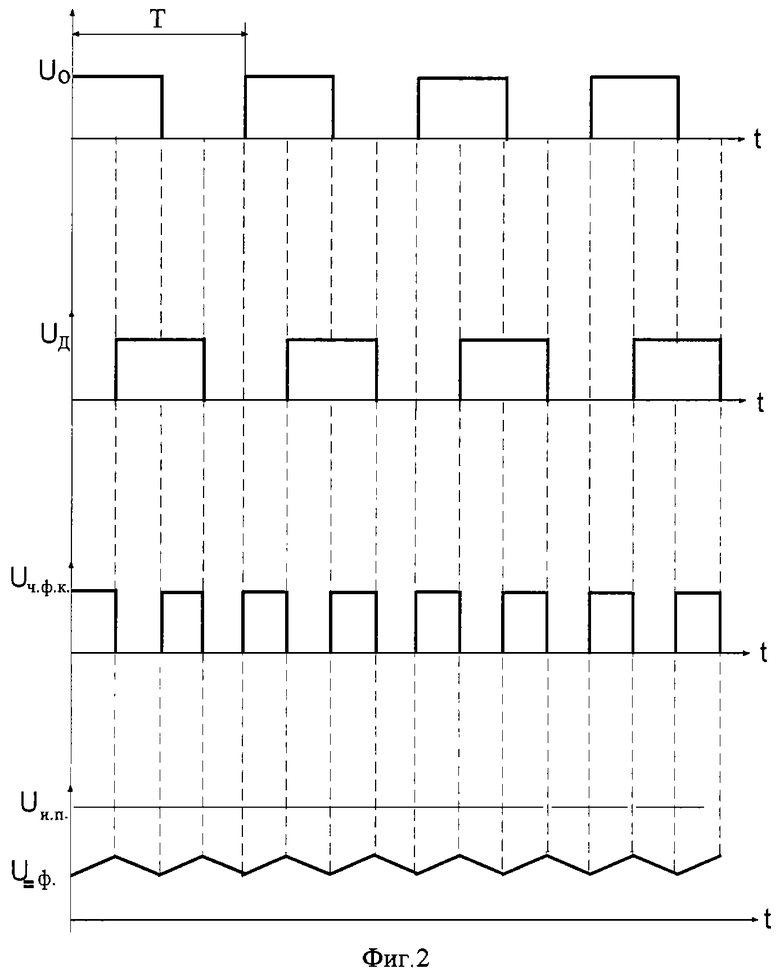
На фиг.2 представлена характеристика выходного напряжения с частотно-фазового компаратора при работе в фазовом режиме.
Бесконтактный электропривод содержит мостовой коммутатор 1 на транзисторах, выходами связанный с якорной обмоткой 2 бесконтактного электродвигателя, входящего в электропривод, датчик положения ротора 3, выходы которого соединены с соответствующими входами 4,5,6 схемы управления 7 мостовым коммутатором 1. Вход 8 генератора которого подключен к точке соединения резистора 9 и конденсатора 10 цепи узла токоограничения. Второй вывод резистора 9 соединен с положительным полюсом 11 источника опорного напряжения схемы управления 7 мостовым коммутатором 1. Второй вывод конденсатора 10 связан с общей шиной источника питания.
Вход 12 узла токоограничения подключен к общей точке измерительного резистора 13 и одного из силовых входов мостового коммутатора 1. Электропривод содержит датчик частоты вращения 14, включающий диск 15 с перфорацией по периметру, жестко закрепленный на валу бесконтактного электродвигателя.
С одной стороны указанного диска установлен источник излучения 16, а с другой - фотоприемник 17, подключенный к усилителю-формирователю 18 частоты вращения электродвигателя, первый 19 и второй 20 формирователи импульсов, частотно-фазовый компаратор 21 с двумя входами и одним выходом, соединенным с входом 22 задатчика частоты вращения схемы управления 7 мостовым коммутатором 1. Один вход частотно-фазового компаратора 21 подключен к выходу первого формирователя импульсов 19, вход которого связан с выходом датчика частоты вращения 14, а второй вход частотно-фазового компаратора 21 связан с выходом второго формирователя импульсов 20, на вход которого поступает задающая частота управления электроприводом.
Устройство работает следующим образом.
При пуске электродвигателя на вход 22 схемы управления 7 мостовым коммутатором 1 подается напряжение с выхода частотно-фазового компаратора 21 амплитудой, равной опорному напряжению питания. При этом частотно-фазовый компаратор 21 реализован, например, на микросхеме КР 1561ГМ и имеет характеристику с насыщением выходного напряжения от частоты. Бесконтактный электродвигатель разгоняется по естественной характеристике до момента равенства частоты fд с датчика вращения 14 и задающей частоты fo управления. Тогда появляется на выходе частотно-фазового компаратора 21 напряжение, определяемое разностью фаз, и описывается выражением
где Vн - амплитуда напряжения; - скважность импульсов;
- скважность импульсов;
Т - период следования импульсов частотно-фазового компаратора;
τ - длительность импульса;
ТТ=(R1+R2)С1 и Т2=R1•С1 - постоянные времени выходного фильтра.
Работа частотно-фазового компаратора в режиме фазового регулирования поясняется эпюрами напряжений, изображенных на фиг.2. Сдвиг по фазе импульсов Vо задающей частоты fo и импульсов Vд частоты fд датчика вращения 14 электродвигателя имеет интегральный характер и определяет уровень напряжения управления V= Ф, а следовательно, частоту вращения бесконтактного электродвигателя. При этом частота вращения бесконтактного электродвигателя поддерживается стабильностью, определяемой задающей частотой fo управления.
В оптоэлектронном датчике 14 частоты вращения может быть использовано в качестве диска с перфорацией зубчатое колесо 15 из любого оптически непрозрачного материала толщиной 0,5-1,5 мм. Указанное зубчатое колесо 15 жестко крепится к приводному шкиву, установленному на вал бесконтактного электродвигателя. При количестве прорезей на зубчатом колесе 15, равном, например, 60, частота вращения электродвигателя, равная 1 об/мин, будет соответствовать частоте датчика 14 вращения равной 1 Гц. В качестве излучателя 16 и фотоприемника 14 использована оптопара с открытым оптическим каналом типа ПЛТП - 0,5/3.
Применение предложенного бесконтактного электропривода позволяет повысить надежность, а также стабильность вращения электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2001 |
|
RU2219649C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ | 2001 |
|
RU2199752C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ БЕСКОНТАКТНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2023343C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2001 |
|
RU2216096C2 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2001 |
|
RU2216088C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ИЗБЫТОЧНОЙ МОЩНОСТИ СОЛНЕЧНОЙ БАТАРЕИ | 2001 |
|
RU2211480C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ИЗБЫТОЧНОЙ МОЩНОСТИ СОЛНЕЧНОЙ БАТАРЕИ | 2000 |
|
RU2199808C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЧАСТОТНЫХ ХАРАКТЕРИСТИК СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 2001 |
|
RU2201614C2 |
| ЭЛЕКТРОННЫЙ ПРЕДОХРАНИТЕЛЬ | 2000 |
|
RU2185016C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ N ГАЛЬВАНИЧЕСКИ СВЯЗАННЫХ АККУМУЛЯТОРОВ | 2000 |
|
RU2199759C2 |
Изобретение относится к электротехнике и может быть использовано в различных системах автоматики и преобразовательной техники. Техническим результатом является повышение стабильности частоты вращения и надежности. Бесконтактный электропривод постоянного тока содержит датчик частоты ращения, включающий диск с перфорацией по периметру, жестко закрепленный на валу электродвигателя. С одной стороны диска установлен источник излучения, а с другой стороны - фотоприемник, подключенный к усилителю-формирователю частоты вращения электродвигателя, формирователи импульсов, частотно-фазовый компаратор с двумя входами и одним выходом, соединенным с входом задатчик частоты вращения схемы управления мостовым коммутатором. Один вход частотно-фазового компаратора подключен к выходу первого формирователя импульсов, вход которого связан с выходом датчика частоты вращения, а второй вход частотно-фазового компаратора связан с выходом второго формирователя импульсов, на вход которого поступает задающая частота управления электроприводом. 2 ил.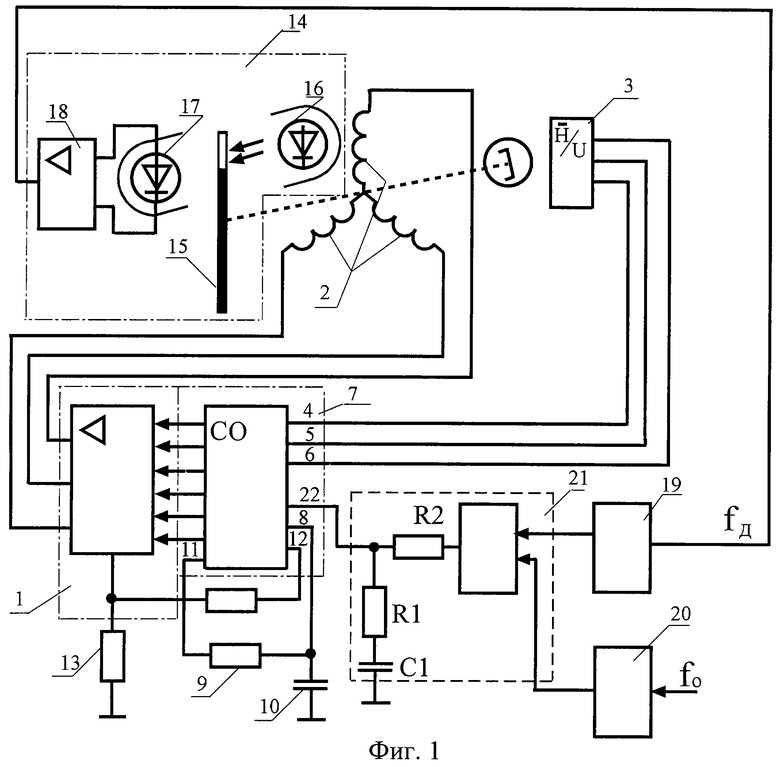
Бесконтактный электропривод постоянного тока, содержащий мостовой коммутатор на транзисторах, выходами связанный с якорной обмоткой бесконтактного электродвигателя, входящего в электропривод, датчик положения ротора, выходы которого соединены с соответствующими входами схемы управления мостовым коммутатором с узлом токоограничения, вход генератора которого подключен к точке соединения резистора и конденсатора цепи узла токоограничения, второй вывод указанного резистора соединен с положительным полюсом источника опорного напряжения схемы управления мостовым коммутатором, а второй вывод указанного конденсатора связан с общей шиной источника питания, при этом вход узла токоограничения подключен к общей точке измерительного резистора и одного из силовых входов мостового коммутатора, отличающийся тем, что он дополнительно содержит датчик частоты вращения, включающий диск с перфорацией по периметру, жестко закрепленной на валу бесконтактного электродвигателя, с одной стороны указанного диска установлен источник излучения, а с другой стороны - фотоприемник, подключенный к усилителю-формирователю частоты вращения электродвигателя, первый и второй формирователи импульсов, частотно-фазовый компаратор с двумя входами и одним выходом, соединенным с входом задатчика частоты вращения схемы управления мостовым коммутатором, при этом один вход частотно-фазового компаратора подключен к выходу первого формирователя импульсов, вход которого связан с выходом датчика частоты вращения, а второй вход частотно-фазового компаратора связан с выходом второго формирователя импульсов, на вход которого поступает задающая частота управления электроприводом.
| Автоматическое устройство для закалки сверл и т.п. стальных изделий цилиндрической формы | 1930 |
|
SU33035A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ БЕСКОНТАКТНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2023343C1 |
| Устройство для определения углового положения ротора вентильного электродвигателя | 1985 |
|
SU1295484A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 0 |
|
SU314268A1 |
| Устройство для определения углового положения ротора вентильного двигателя | 1987 |
|
SU1427567A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Высевающая система сеялки | 1985 |
|
SU1299533A1 |

