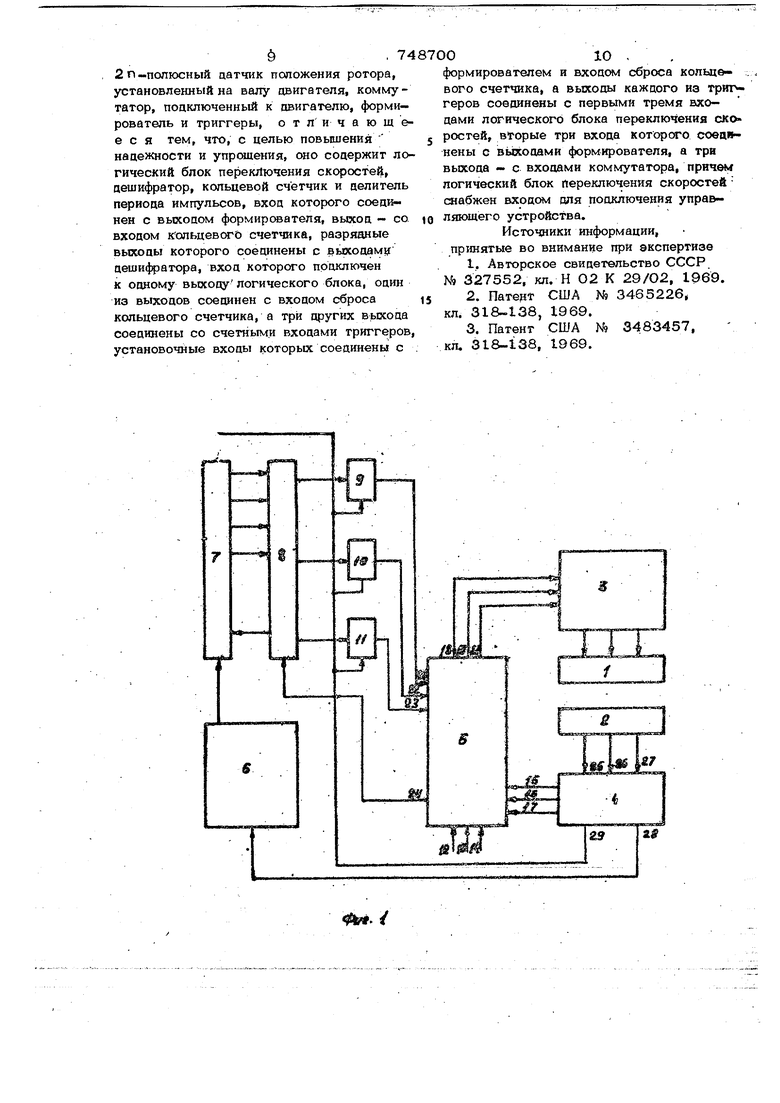
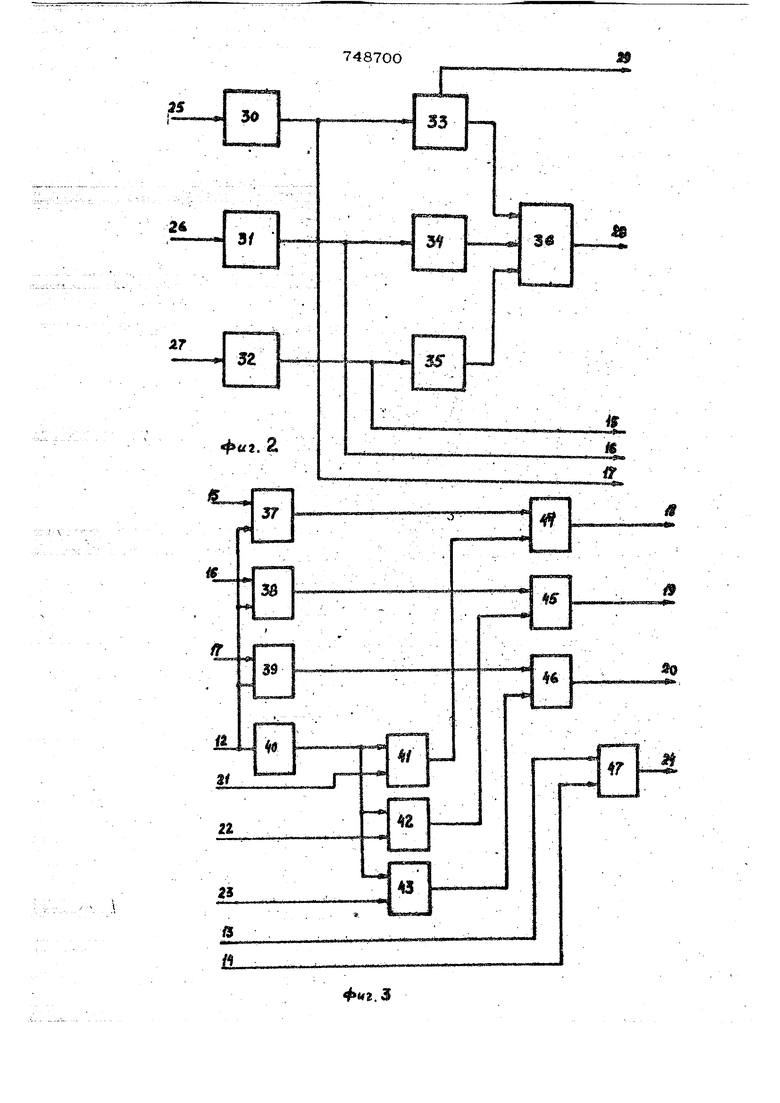
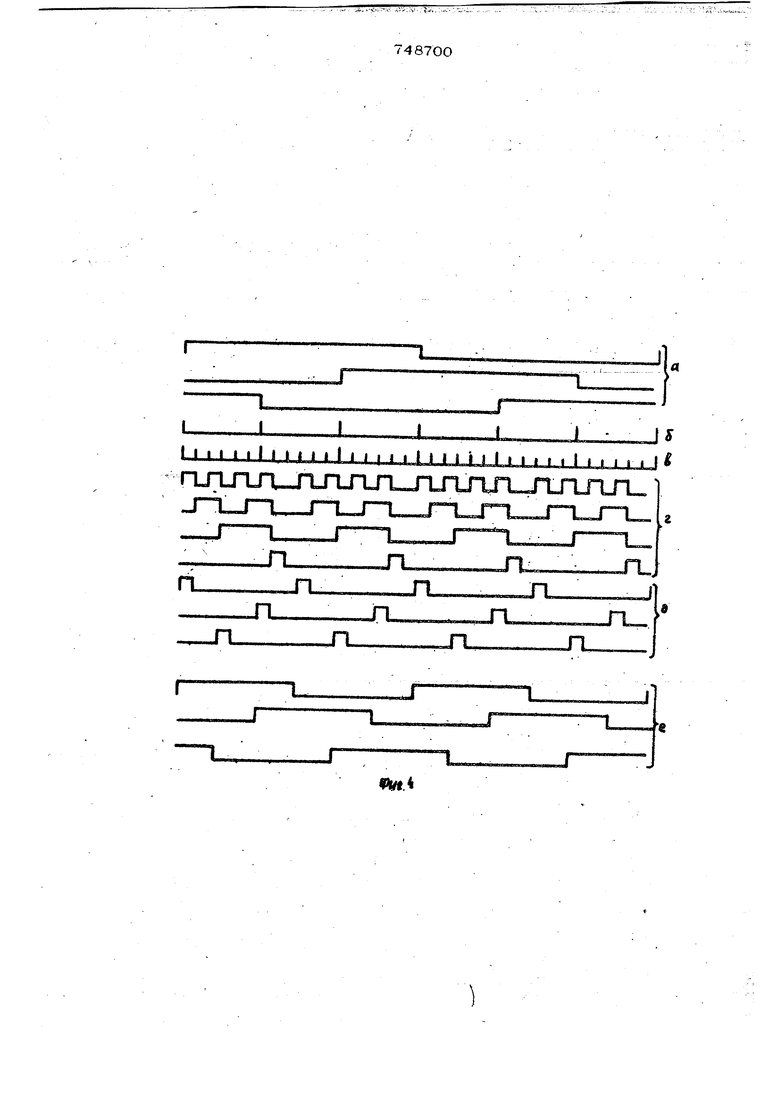
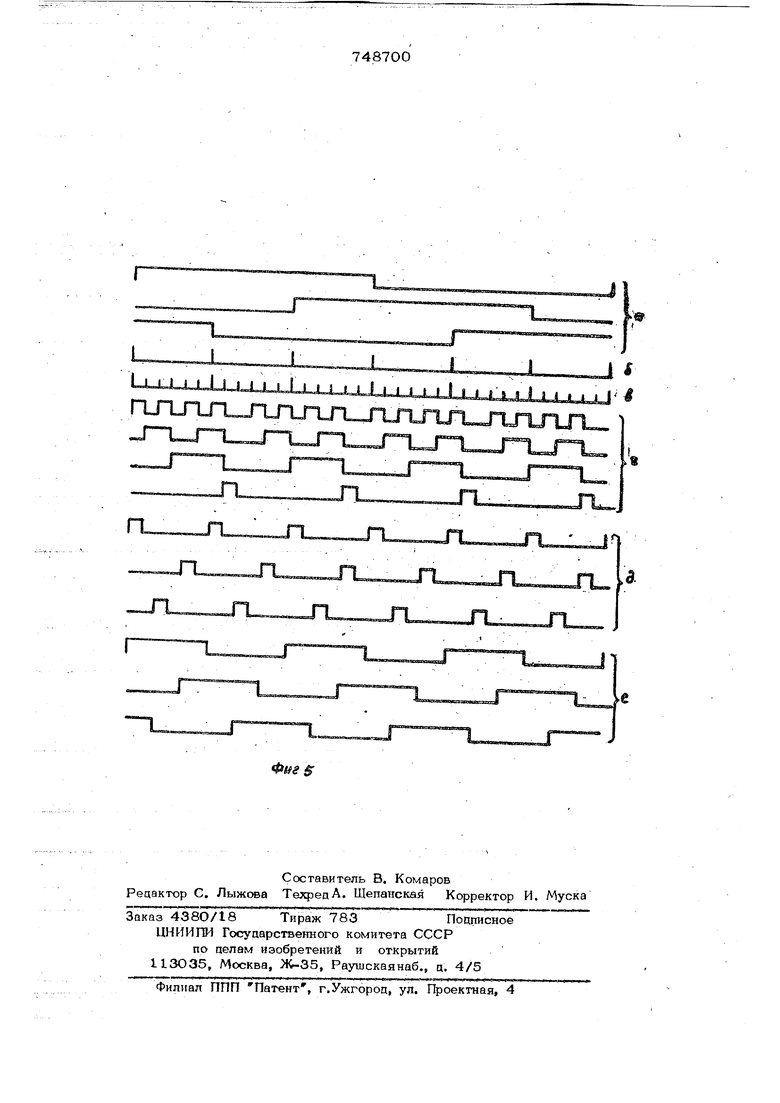
(54) УСТРОЙСТЕЮ СОГЛАСОВАНИЯ ДЛЯ БЕСКОНТАКТНОГО ДВИГАТЕЛЯ Изобретение относится к электротехнике, а именно к бесконтактнь1м цвигатепям постоянного тока и может быть иопользовано для согласования датчиков по ложения ротора с цвигателями при различ ном числе пар полюсов между ними, а также при различных скоростях вращения двигателя и датчика положения. Известен бесконтактн 1й электродвигатель постоянного тока, содержащий датчик скорости вращения, выполненный на основе обращенного бесконтактного сельгсина, подключенного кт-фазному генератору опорной частоты и соединенного с коммутатором тока обмоток через m дешифраторов, каждый из которых двумя вхо дами подключен к выходу датчика, а другими входами - к соответствующей фазе генератора опорной частоты l. Устройство управления двигателем обеспечивает работу только при одном заданном соотнощении числа пар полюсов двигателя и сельсина, поэтому известное устройство не может работать, если чисПОСТОЯННОГО ТОКА ло пар полюсов двигателя и сельсина отличается от заданного. I Известно Также устройство согласования для бесконтактного двигателя постоянного тока, которое содержит синусно-косинусный вращающийся трансформатор (СКВТ), синхронизатор, два модулятора с фильтрами нижних частот, устройство . запоминания, выхоцпой усилитель и двигатель с К пирами полюсов. СКВТ, имеющий Ы пар полюсов, укреплен на одной оси с двигателем, причем и K/N является целым числом. Выходное напр$ жение СКВТ, являющееся функцией угла поворота, преобразуется синхронизатором в импульсную форму и синхронизирует ра-. боту устройства запоминания двух управЛЯЮЩИХ сигналов, сдвинутых друг по OTV ношению к другу на 90°. Управляющие сигналы от запоминающего устройства преобразуются в сигналы, модулированные по ширине импульса, которые управляют двигателем. Устройство управления обеспечи 37 ваот сдвиг по фазе сигналов управления II, аеленне частоты на коэффициент Недостатком известного устройства yriравления $голяется сложность и громоздкость схемы при использовании двигателя и датчика положения с различным ЧИСЛОМ пар полюсов. Наиболее близким по технической сущности к изобретению является устройство согласования для бесконтактного двигателя постоянного тока, имеющего гп пар полюсов, с СКВТ, имеющим ь пар полюсов, содержащее двигатель, СКВТ, генера торы, формироввтели, делители частоты, схему сравнения, логические элементы, триггеры, схему задержки и фазосдвигающие цепи. В этом устройстве обеспечивается согласование СКВТ, который имеет п пар полюсов, с йвигателем, имеющим гп пар полюсов. Согласование обеспечивается за счет использования генератора с номинальной частотой У.т/пШо, Д® X - целое число;Ш0- частота возбуждения СКВТ З. Недостатком этого устройства управпенггя является сложность схемы упра&ления при согласовании машин, наобходимосгь иметь стабильный номинальный генератор, частота которого должна, быть изменена в случае применения СКВТ с другим числом пар полюсов. Цель Изобретения - повышение надежности при ошювременном упрощении устройства согласования дв1л ателя с датчиками положения при различном числе пЯр полюсов этих элементов, а также при раз личных скоростях вращения двигателя и датчика положения. Эта цель достигается тем, что в уст ройство согласования для бесконтактного двигателя постоянного тока, содержащее двигатель, коммутатор, датчик положения формирователь и триггеры, введен логический блок переключения скоростей, дешифратор, кольцевой счетчик и делител периода импульсов, вход которого соёдиTieffc вь1х;оцЬм форктирователя, выход - со счетным входом кольцевого счетчика разрядные выходы которого соединены с дешифратором, вход Которого соединен с выходом логического блока переключения скоростей, один из выходов - со входом сброса кольцевого счетчика, а три других выхода соединены со счетными входами )Hrret56BV yftTuHOBbtfiibie входы которых соедт1ены с фор 1Ирователем и входом г сброса ко1п,цевого счетчика, а выходы кпжцого из триггеров соединены с первы 04 тремя вхоцами логического блока перекл1о- чения скоростей, вторые три входа которого соединены с каждым из трех выходов формирователя, а три выхода - с коммутатором, причем логический блок пере ключения скоростей снабжен входом для подключения у прибавляющего устройства. На фиг. I изображена структурная сх ма устройства; на фиг. 2 - структурная схема формирователя; на фиг. 3 - структурная схема логического блока переключения скоростей; на фиг. 4 и 5 - диаграммы сигналов на различных элементах устройства. Устройство (фиг. I) содержит двигатель 1 с трехфазной обмоткой с гт парами полюсов, датчик 2 положения (сельсин) с п парами полюсов, коммутатор 3, формирователь 4, логический блок 5 перекл1о чения скоростей, делитель 6 периода. на 6, кольцевой счетчик 7 на 9, дешифратор 8, триггеры 9-11, вход 12 сигнала управления при одинаковой скорости вращения двигателя и датчика положения, лгьбо при одинаковом числе пар полюсов, ; вход 13 сигнала управления при отношении скорости вращейия двигателя и датчика . 2, либо отношение числа пар полюLUсов двигателя к числу пар полюсов датчика TV)/п 2, вход. 14 сигнала , ./правления при отношении скорости вращения двигателя и датчика 9В 3, либо от ношение числа пар полюсов двигателя к числу пар полюсов датчика 3,вход 15-17 сигналов формирователя на логическое устройство, выход 18-20 сигналов управления коммутатором, вход. 21-23 сигналов коммутатора от триггеров, выход 24 сигнала управления дешифратором, вход 25-27 сигналов управления на формирова- тель от датчика положения, выход 28 импульсной последовательности на делитель периода, сигнал 29 установки триггеров 9-11 и кольцевого счетчика 7. Устройство (фиг. 2) также содержит фаз-очувствительные триггеры ЗО-32, схемы 3S-35 выделения переднего и задгнего фронтов, элемент 36 ИЛИ. Кроме Toto, устуюйство (фиг.3) содержит элементы 37-39 И, элемент 40 НЕ. элементы 41-43 И, элементы 44-46 ИЛИ, R-S триггер 47. На фиг. 4 приведены диаграммы для случая работы устройства при отношении скорости вращения двигателя и датчика, равного 2, или отношении числа пар полюсов двигателя к числу пар по-. люсов датчика /п 2: а - сигнал вьцсопа формирователя 4 п ПИНИ51М 15-17; б - выхооиые сигналы формирователя 4 по линии 28, в - выхогдной сигнал после целителя б периода; г - разрядные выходы кольцевого сче чика 7; ц -, выходные сигналы дешифратора 8 е - сигналы управления коммутатором 3 по линиям 21 - 23 при скорос ти вращения двигателя больше скорости вращения датчика в два ра ; aia или отношении т/п 2. На фиг. 5 приведены диаграммы для случая работы устройства при отношении скорости вращения двигателя и датчика, равного 3, или отношении числа пар полюсов двигателя к щюлу пар полюсов да датчика m/fv 3: а - сигнал выхода формирователя 4 по линиям 15-17; б - выходные сигналы формирователя 4 по линии 28; в - выходной сигнал после делителя 6 периода; г разрядные выходы кольцевого сче чика 7| д - выходные сигналы дешифратора 8; е- сигналы управления коммутатором 3 по линиям 21-23 при скорости вращения двигателя больше скорости вращения датчика в три ра за или отношении rn/n 3. Датчик 2 положения предназначен для определения положения ротора в. текущий момент времени. В качестве датчика положения может быть использован любой датчик (сельсин,фотоэлектрический датчик, датчик Холла и др.), обеспечивающий на ЛИниях 15-17 сигналы, изображенные на фиг.. 4 а и 5 а. В устройстве используется сельсин с п парами полюсов и двигатель постоянного тока с тремя обмотками и m парами полюсов. В случае использования вместо сельсина СКВТ пе реход СКВТ-сельсин может быть рсущес влен с погугощью, например, трансффматора Скотта. Коммутатор 3 используется для переключения тока в обмотках овигателя 1 в последовательности, определяемой управляющими сигналами, изображенными на на фиг. 4 е и 5 е. Формирователь 4 предназначен для пре преобразования входных сигналов сельсина, поступающих пЬ линиям 25-27, к виду, изображенному на фиг, 4 а и 5 а. Ука занное преобразобание осуществляется при использовании известных фаэочувствительных триггеров 30-32. Кроме этого, формирователь 4 с помощью схем 33-35 осуществляет выделение этих фронтов и сложение полученных импульсов на элементе 36 ИЛИ. Выход элемента 36 ИЛИ по линий 28 изображен на фиг; 46 и 56. По линии 29 по пйреднем г фронту сигнала от фазочувствительного триггера ЗО осуществляется установка триггеров 911 и кольцевого счетчика 7. Сигналы фазочувствительных триггеров по линиям 15-17 поступают на логический блок.5 переключения скоростей. Логический блок 5 переключения скоростей предназначен дЛя выдачи на комму татор 3 управля1ощих сигналов в зависимости от соотношения между скоростями вращений двигателя и. датчика, равн.ого 1:1, 2:1 иЗ:1, или в зависимости от от отношения числа пар полюсов между ними, которое может быть равным т/п 1,2 и 3. Выдача сигналов на коммутатор осуществляется по линиям 1 &-20 при подаче сорт1ветствующих сигналов на шины ynpai ления 12-14 (см. фиг. 1 и 3). Прк подаче управляющего сигнала на шину 12 (например, высокого уровня) открываются элементы 37-39 И и на выход 18-20 через элементы 44-46 ИЛИ .подаются сигналы управления коммутатором при соотношении между скоростями вращения двигатели и датчика 1:1-или одинаковом числе полюсов.. При этом управляющие сигнйлы от триггеров ,9-11 по линиям 21-23 не проходят на элементы 44-46 ИЛИ, так как разрешающий сигнал (высокий уровень на шине 12) инвертирует ся инвертором 40 .и закрывает элементы И ,41-43. . . ,. . При подаче на шину 12 (например, низкого уровня ) элементы 37-39 И закрыты, а элементы 41-43 И открьюаются вследствие инвертирования низкого уровня шины 12 инвертором 4О. При этом на вькоде 18-20 через элементы 44-46 ИЛИ в зависимости от сигнала 24 управления дешифратором 8 поступают сигналы управления коммутатором при соотношении межсо скоростямивращения двигателя и датчика 2:1 или отношении числа пар полюсов двигателя к числу пар полюсов датчи;ка m/n 2. Это происходит при низком уровне на линии 24 Р- S триггера 47 при yпpaвлшoщIix сигналах,высокого и низкого уровня соответственно на шинах 13 и 14. При сигналах, соответствующих низкому ивысокому уровню на шинах 13 и 14, на линии 24 обеспечивается высокий уровень и, слецовательно, на выхоц 18-20 поступают сигналы управления коммутатором при соотношении между скоростями вращения двигателя и цатчика 3:1 или отношении числа пар полюсов двигателя к числу пар полюсов да-п чика m/n 3. Делитель 6 периода осуществляет деление периода поступающих импульсов на 6 равных частей. Назначение остальных элементов, входящих в состав устройства со асования для бесконтактного двигателя, определяется их названием. Устройство работает следующим об. разом. ,, , 1 При вращении ротора двигателя в дат чйке 2 положения вырабатываются сигналы, сдвинутые друг по отношению сфуга : на 120 эл. град. В формирователе 4 указанные сигналы прйвоцятся к вицу, показанному на фиг. 4 и 5 а. Помимо этого формирователь 4 осу ществляет выделение среднего и заднего фронтов сформированных сигналов и их сложение, как это изображено на фиг. 46 и 56. По переднему фррнту первой фазы от датчика 2 положения осуществляется установка триггеров 9 и Ю в положение О, триггера II - в положение 1 и сброс кольцевого счетчика 7, как это показано на фиг. 4 а и 5 е. Период импульсной последовательности от формирователя 4с помощью делителя 6 периода делится на 6 равных частей Выходной сигнал делителя периода изображен на фиг. 4 в и 5 в, где сигналы фронтов дат чика 2 положения имеют условно большую амплит ду. Сформированная импульсная последовательность {фиг. 4 в и 5 в) с пе риодом, равным периода сигналов датч ка положения, поступает на кольцевой счетчик 7 с коэффициентом счета,равным 9. Выбранный коэффициент деления периода на 6 и коэффициент счета 9 обе пеЧ11бают согласование при соотношении между скоростями вращения -Двигателя и датчика в трИ раза или соотношенит числа пар полюсов двигателя к числу пар полюсов датчика пгуЦ 2 и 3. При необходимости согласования скоростей вращения или числа погаосов двига- геля и датчика в отличное число от выш приведенных значений коэффициенты деле ния делителя 6 периода и счета кольцевого счетчика 7 должны быть соответствующи образом подобраны. 74 08 Изменение уровней разрядов кольцево-; го счетчика 7 показано на фиг. 4 г и 5г. Поразрядно выходные уровни кольцевого счетчика поступают на дешифратор 8, который в случае согласования при ношении между скоростями вращения двигателя и датчика в два раза или отношении числа пар полюсов двигателя к числу пар полюсов датчикаглу 2 осуществляег управление триггерами 9-11 от кодов 0001, 0111 и 010О соответственно, как это показано на фиг. 4д и 4е. В случае согласования при соотношении между скоростями вращения двигателя и датчика в три раза или отношении числа пар полюсов двигателя к числу пар по люсов датчика гт)А 3 управление триггерами 9-11 осуществляется от дешифратора 8 при наличии кодов ОО01, 0101 и ООН соответственно, как это показано на фиг. 5д и 5 е. Управление переключением дешифраторов осуществляется от логического блока 5 п&реключения Скоростей при наличии.соответствующих Сигналов нуля или едвдицы на линии 24. Сформированные сигналы управления с выходов триггеров 9-11 поступают на логический блок 5 переключения скоростей, который выдает сигналы управления на вход коммутатора 3 (см. фиг. 4е и 5е). При этом при подаче на шину 12 сигнала управления высокого уровня осуществляется работа двигателя при одинаковой скорости вращения двигателя и датчика положения или одинаксжом числе пар полюсов между ними, так как на коммутатор 3 поступают сигналы управления непосредственно с датчика 2. положения через формирователь 4. Таким образом, данное устройство, да ет возможность согласования двигателей и датчиков при одинаковом значении их скоростей вращения и одинаковом числе/ пар полюсов, а также при соотношении между ними 2:1 и 3:1. Использование предложенного устройства согласования дает возможность применения разнообразных двигателей постоянного тока совместно с датчиками, имеющими межоу собой разлишое число пар полюсов. ормула изобретен и Устройство согласования для бесконтактного двигателя постоянного тока, co-i держащее 2т-полюсный двигатель и
2 г-полюсный датчик положения ротора, установленный на валу овигателя, коммутатор, подключенный к овигателю, формирователь и триггеры, отличающееся тем, что, с целью повьЕнения надежности и упрсяцения, оно содержит логический блок переключения скоростей, дешифратор, кольцевой счетчик и делитель периода импульсов, вход которого соединен с выходом формирсжателя, выход - со входом кольцевогь счетчика, разрядные выходы которого соединены с выходам деши4 атора, вход которого подключен к одному выходу логического блока, один иэ выходов соединен с входом сброса кольцевого счетчика, а три других выхода соединены со счетными входами триггеров, установочйые входы которых соединены с
формирователем и входом сброса кольце- . вого счетчика, а выходы каждого иэ триггеров соединены с первыми тремя входами логического блока переключения скоростей, вторые три входа которого соединены с выходами формирователя, а три выхода - с входами коммутатора, причем логический блок переключения скоростей снабжен входом для подключен1яя управляющего устройства.
0
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
N9 327552, кл. Н О2 К 29/О2, 1969.
2.Патент США N9 3465226, кл. 318-138, 1969.
3.Патент США 3483457, кл, 318-138, 1969.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вентиль-НыМ элЕКТРОдВигАТЕлЕМ | 1979 |
|
SU813609A1 |
| Электропривод переменного тока | 1986 |
|
SU1336189A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1972 |
|
SU327552A1 |
| Вентильный электродвигатель | 1977 |
|
SU743129A1 |
| Устройство для управления электрической машиной переменного тока | 1980 |
|
SU930555A1 |
| Бесконтактный электродвигатель постоянного тока | 1973 |
|
SU479202A2 |
| Привод ориентации шпинделя металлорежущего станка | 1984 |
|
SU1241194A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1987 |
|
RU2056700C1 |
| Вентильный электродвигатель | 1978 |
|
SU750666A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU942091A1 |
. /
as
33
24
3/
If
32
фиг. Z
.3
2ИГ
35
№
i I j I I I i J I j if I I I t I MM { LH JJ 1 I tJ rj
гlЛJ Jгл JlJlJг«JlJl
1
s
I
ri
ji
JT
n
n
л
JT
n
JT
n
JT
n
n
ri
JT
JT
JL.
Фlfg S
n
TL
JTL
,a.
e
