Изобретение относится к электротехнике, в частности к индукционным регуляторам, и может быть использовано, например, для регулирования напряжения.
Известна конструкция индукционного регулятора (см. Костенко М.П., Пиотровский Л. М. Электрические машины. Ч.2. - Л.: Энергия, 1973, с.389-390), представляющего собой обычную асинхронную машину цилиндрического исполнения с фазным заторможенным ротором. Такой индукционный регулятор содержит статор и ротор с соответствующими трехфазными обмотками, корпус, подшипниковые щиты и самотормозящуюся червячную передачу, позволяющую оператору вращать ротор относительно неподвижного статора на необходимый угол с целью изменения величины выходного напряжения. При этом за первичную обмотку принимается обычно обмотка ротора, за вторичную - обмотка статора. При поворачивании ротора величина выходного напряжения плавно изменяется.
Однако конструкция такого индукционного регулятора сложна из-за необходимости штамповки листов магнитопроводов статора и ротора. Кроме того, стоимость такого индукционного регулятора велика из-за большого расхода электротехнической стали, связанного с высоким процентом ее отходов при штамповке.
Наиболее близким к изобретению по физической сущности и достигаемому результату является аксиальный индукционный регулятор (см. патент 2168785, 2001, БИ 28, авторы Гайтов Б.Х., Кашин Я.М., Сингаевский Н.А. и др.), содержащий два тороидальных магнитопровода с пазами, в которые уложены первичная и вторичная трехфазные обмотки, начала которых электрически соединены между собой посредством скользящих контактов, а тороидальный магнитопровод с первичной обмоткой, соединенной в "звезду", выполнен подвижным относительно тороидального магнитопровода с вторичной обмоткой, для чего установлена червячная передача, жестко связанная с подвижным магнитопроводом, причем между тороидальными магнитопроводами имеется воздушный зазор, необходимый для их взаимного перемещения, а вторичная обмотка выполнена имеющей возможность подключения к нагрузке.
Существенным недостатком такого аксиального индукционного регулятора является сложность конструкции, вызванная необходимостью взаимного перемещения магнитопроводов, наличие воздушного зазора между магнитопроводами, приводящее к увеличению магнитного сопротивления, а следовательно, к увеличению токов, необходимых для создания требуемого магнитного потока (тока намагничивания), то есть к увеличению требуемого сечения проводов обмоток и соответственно к ухудшению массогабаритных показателей регулятора, увеличению его стоимости и увеличению потерь энергии. Кроме того, существенным недостатком аксиального индукционного регулятора с поворотным ротором является наличие большого осевого (аксиального) электромагнитного усилия, вызванного в результате притяжения магнитопроводов ротора и статора. Это усилие ведет к преждевременному выходу из строя подшипниковых узлов, что уменьшает надежность работы индукционного регулятора в целом.
Данное изобретение решает задачу упрощения конструкции и технологии изготовления индукционного регулятора, уменьшения расхода материалов на его изготовление, повышения надежности его работы, улучшения его массогабаритных показателей и уменьшения стоимости.
Для этого тороидальный магнитопровод с первичной обмоткой, соединенной в "звезду", выполняется неподвижным относительно тороидального магнитопровода со вторичной трехфазной обмоткой, а первичная обмотка выполняется многофазной с числом фаз, большим шести и кратным трем (9, 12 и т.д., то есть m= 3k, где m - число фаз первичной обмотки, k=3, 4...), причем коммутатор выполняется с углом поворота, обеспечивающим при его повороте подключение группы фаз указанной первичной многофазной обмотки к соответствующим фазам вторичной трехфазной обмотки и трехфазной питающей сети.
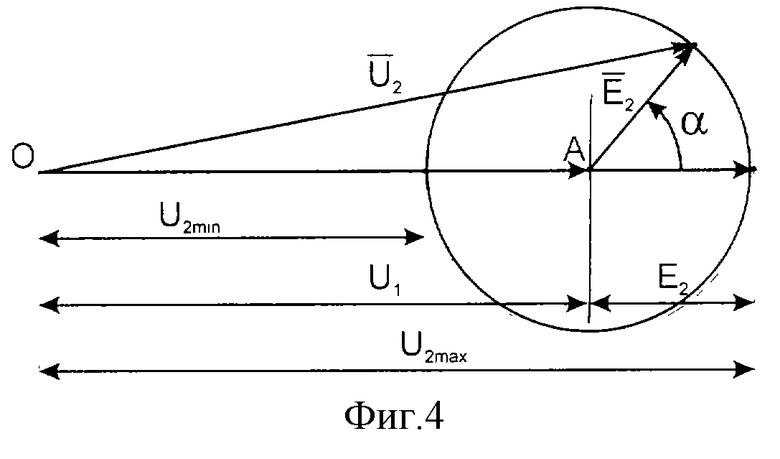
На фиг. 1 представлен общий вид предлагаемого многофазного аксиального индукционного регулятора в разрезе, на фиг.2 - схема соединения его обмоток, на фиг.3 - ЭДС и токи в одной обмотке, на фиг.4 - векторная диаграмма.
Многофазный аксиальный индукционный регулятор содержит (см. фиг.1): неподвижный тороидальный магнитопровод 1 с первичной многофазной, например, двенадцатифазной обмоткой 2, неподвижный тороидальный магнитопровод 3 с вторичной трехфазной обмоткой 4, начала соответствующих фаз которой электрически соединены с началами фаз первичной многофазной обмотки 2 посредством трехфазного электромеханического коммутатора 5 со скользящими контактами 6 (см. фиг. 2), корпус 7. Трехфазный электромеханический коммутатор 5 скользящими контактами 6 обеспечивает при его повороте подключение группы фаз первичной многофазной обмотки 2 к соответствующим фазам трехфазной питающей сети и к соответствующим фазам вторичной трехфазной обмотки 4.
Многофазный аксиальный индукционный регулятор работает следующим образом. При подключении соответствующих фаз первичной многофазной обмотки 2 неподвижного тороидального магнитопровода 1 к трехфазной питающей сети напряжением U1 в магнитопроводах многофазного аксиального индукционного регулятора создается вращающееся магнитное поле, которое, взаимодействуя с вторичной трехфазной обмоткой 4 неподвижного тороидального магнитопровода 3, наводит в ней систему ЭДС. При подключении посредством контактов 6 коммутатора 5 первой фазы W1 1 (фиг.2) первичной многофазной обмотки 2 многофазного аксиального индукционного регулятора к началу первой фазы W2 1 (фиг.2) вторичной трехфазной обмотки 4 пространственные оси соответствующих фаз первичной и вторичной обмоток (W1 1 и W2 1,  и W2 2,
и W2 2,  и W2 3) совпадают. Здесь m - число фаз первичной обмотки; нижний индекс: 1 - первичная обмотка, 2 - вторичная обмотка; верхний индекс - номер фазы в обмотке. При этом магнитный поток
и W2 3) совпадают. Здесь m - число фаз первичной обмотки; нижний индекс: 1 - первичная обмотка, 2 - вторичная обмотка; верхний индекс - номер фазы в обмотке. При этом магнитный поток  (см. фиг. 3) одновременно набегает на подключенные фазы первичной обмотки 2 и фазы вторичной обмотки 4 и наводит в них ЭДС
(см. фиг. 3) одновременно набегает на подключенные фазы первичной обмотки 2 и фазы вторичной обмотки 4 и наводит в них ЭДС  , совпадающие по фазе и одинаково направленные относительно обмоток. При этом вектор ЭДС
, совпадающие по фазе и одинаково направленные относительно обмоток. При этом вектор ЭДС  действует согласно с вектором напряжения
действует согласно с вектором напряжения  . Поэтому напряжение
. Поэтому напряжение  (см. фиг. 4) на зажимах потребляющей сети представляет собой арифметическую сумму U1 и Е2: U2=U2max=U1+E2, так как соответствующие фазы первичной и вторичной обмоток 2 и 4 электрически соединены между собой, как указано выше.
(см. фиг. 4) на зажимах потребляющей сети представляет собой арифметическую сумму U1 и Е2: U2=U2max=U1+E2, так как соответствующие фазы первичной и вторичной обмоток 2 и 4 электрически соединены между собой, как указано выше.
При повороте рукоятки коммутатора (на фиг.1 она не показана, как не имеющая отношения к существу изобретения), жестко связанной с коммутатором 5 на угол αi = i•2π/m, где i=0, 1, 2, 3... - номер шага угла поворота (и соответственно группы фаз первичной многофазной обмотки 2) коммутатора, коммутатор 5 контактами 6 подключает i-ю группу фаз первичной многофазной обмотки 2 к соответствующим фазам вторичной обмотки 4
(W1 i+1 к W2 1,  к W2 2,
к W2 2,  к W2 3).
к W2 3).
Это приводит к соответствующему повороту вектора ЭДС  (см. фиг.4) вторичной трехфазной обмотки 4 относительно вектора напряжения
(см. фиг.4) вторичной трехфазной обмотки 4 относительно вектора напряжения  подаваемого на первичную обмотку 2 из питающей сети. При m четном возможен поворот коммутатора на угол α=180o. При таком угле поворота коммутатора 5 получим U2= U2min= U1-E2. Геометрическое место концов вектора
подаваемого на первичную обмотку 2 из питающей сети. При m четном возможен поворот коммутатора на угол α=180o. При таком угле поворота коммутатора 5 получим U2= U2min= U1-E2. Геометрическое место концов вектора  , а значит, и
, а значит, и  при изменении угла α от 0 до 360o есть круг, описанный из точки А, как из центра, радиусом Е2.
при изменении угла α от 0 до 360o есть круг, описанный из точки А, как из центра, радиусом Е2.
Результирующее выходное напряжение многофазного аксиального индукционного регулятора  при повороте коммутатора 5 относительно магнитопроводов 1 и 3 (см. фиг.1) на угол от 0 до 180o изменяется по величине от U2=U2min=U1-E2 до U2=U2max=U1+E2 и определяется по формуле:
при повороте коммутатора 5 относительно магнитопроводов 1 и 3 (см. фиг.1) на угол от 0 до 180o изменяется по величине от U2=U2min=U1-E2 до U2=U2max=U1+E2 и определяется по формуле:
где  - угол поворота коммутатора 5.
- угол поворота коммутатора 5.
Так, при равенстве по величине между собой напряжения U1 и ЭДС E2 выходное напряжение U2 будет определяться по формуле:
и изменяться по величине от нуля до 2U1.
При этом осуществляется дискретное регулирование напряжения. Требуемая точность регулирования определяется числом фаз m первичной многофазной обмотки.
Предлагаемое изобретение, выполняя функцию индукционного регулятора, как и прототип, в отличие от него позволяет:
- существенно упростить конструкцию регулятора, сложность которой в регуляторе-прототипе вызвана необходимостью взаимного перемещения его магнитопроводов, а следовательно, необходимостью выполнения высоконапряженных подшипниковых узлов;
- повысить коэффициент мощности и коэффициент полезного действия регулятора, низкая величина которых в регуляторе-прототипе вызвана наличием необходимого для взаимного перемещения его магнитопроводов воздушного зазора между магнитопроводами, приводящего к увеличению магнитного сопротивления, а следовательно, к увеличению потерь энергии;
- повысить надежность работы индукционного регулятора, снизить его стоимость и упростить технологию его изготовления за счет отсутствия подшипниковых щитов, неизбежно имеющихся в индукционных регуляторах с поворотным ротором.
В сравнении с известной конструкцией индукционного регулятора, основанного на использовании асинхронных машин цилиндрического исполнения с фазным заторможенным ротором многофазный аксиальный индукционный регулятор позволяет также значительно упростить технологию изготовления магнитопроводов, значительно сократить при этом расход электротехнической стали. Так, при мощности 5 кВт расход стали с учетом конструкции магнитопроводов и отсутствия подшипниковых щитов уменьшается на 35-40%, а срок эксплуатации регулятора увеличивается по крайней мере в три раза. При этом для индукционного регулятора указанной выше конструкции ток намагничивания уменьшается более чем в два раза за счет сведения на "нет" воздушного зазора магнитной системы регулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСИАЛЬНЫЙ ИНДУКЦИОННЫЙ РЕГУЛЯТОР | 1998 |
|
RU2168785C2 |
| АКСИАЛЬНЫЙ ИНДУКЦИОННЫЙ РЕГУЛЯТОР | 2003 |
|
RU2256973C1 |
| СДВОЕННЫЙ АКСИАЛЬНЫЙ ИНДУКЦИОННЫЙ РЕГУЛЯТОР | 1999 |
|
RU2170971C2 |
| Многофазный фазочастотный трансформатор-регулятор | 2018 |
|
RU2689121C1 |
| МНОГОФАЗНЫЙ ТРАНСФОРМАТОР-ФАЗОРЕГУЛЯТОР | 1998 |
|
RU2139586C1 |
| Аксиальный многофазный стабилизируемый трансформатор-фазорегулятор | 2018 |
|
RU2686084C1 |
| МНОГОФАЗНЫЙ ТРАНСФОРМАТОР | 2000 |
|
RU2181512C1 |
| МНОГОФАЗНЫЙ ТРАНСФОРМАТОР | 2003 |
|
RU2249871C2 |
| МНОГОФАЗНЫЙ ТРАНСФОРМАТОР | 1996 |
|
RU2115186C1 |
| МНОГОФАЗНЫЙ ТРАНСФОРМАТОР | 1997 |
|
RU2125312C1 |


Изобретение относится к электротехнике и может быть использовано, например, для регулирования напряжения. Технический результат заключается в упрощении конструкции и технологии изготовления, уменьшении расхода материалов, повышении надежности его работы, улучшении массогабаритных показателей и уменьшении стоимости. Тороидальный магнитопровод имеет первичную многофазную обмотку, соединенную в "звезду". Он установлен неподвижно относительно тороидального магнитопровода со вторичной трехфазной обмоткой. Первичная многофазная обмотка выполнена с числом фаз, кратным трем от шести и выше. Начала фаз обеих обмоток электрически соединены со скользящими контактами коммутатора, позволяющего подключать соответствующие фазы первичной многофазной обмотки к соответствующим фазам трехфазной питающей сети и к началам соответствующих фаз вторичной трехфазной обмотки. Фазы вторичной обмотки подключены к нагрузке. 4 ил.
Многофазный аксиальный индукционный регулятор, содержащий два тороидальных магнитопровода с пазами, в которых уложены первичная и трехфазная вторичная обмотки, отличающийся тем, что тороидальный магнитопровод с первичной обмоткой, соединенной в "звезду", выполнен неподвижным относительно тороидального магнитопровода со вторичной трехфазной обмоткой, а первичная обмотка выполнена многофазной с числом фаз, большим шести и кратным трем, причем коммутатор выполнен с углом поворота, обеспечивающим при его повороте подключение группы фаз указанной первичной многофазной обмотки к соответствующим фазам вторичной трехфазной обмотки и трехфазной питающей сети.
| АКСИАЛЬНЫЙ ИНДУКЦИОННЫЙ РЕГУЛЯТОР | 1998 |
|
RU2168785C2 |
| МНОГОФАЗНЫЙ ТРАНСФОРМАТОР | 1994 |
|
RU2082245C1 |
| ТРАНСФОРМАТОР | 1994 |
|
RU2074435C1 |
| Устройство для защиты памяти | 1977 |
|
SU680060A1 |
| Тензорезисторный датчик силы | 1986 |
|
SU1395961A1 |

