Изобретение относится к электротехнике, в частности к индукционным регуляторам, и может быть использовано, например, для регулирования напряжения.
Известна конструкция индукционного регулятора (см. Костенко М.П., Пиотровский Л.М. Электрические машины, Ч2, Л. "Энергия", 1973, с.389-390), представляющего собой обычную асинхронную машину цилиндрического исполнения с фазным заторможенным ротором. Такой индукционный регулятор содержит статор и ротор с соответствующими трехфазными обмотками, корпус, подшипниковые щиты и самотормозящуюся червячную передачу, позволяющую оператору вращать ротор относительно неподвижного статора на необходимый угол с целью изменения величины выходного напряжения. При этом за первичную обмотку принимается обычно обмотка ротора, за вторичную - обмотка статора. При поворачивании ротора величина выходного напряжения плавно изменяется.
Однако конструкция такого индукционного регулятора сложна из-за необходимости штамповки листов магнитопроводов статора и ротора. Кроме того, стоимость такого индукционного регулятора велика из-за большого расхода электротехнической стали, связанного с высоким процентом ее отходов при штамповке.
Наиболее близким к заявляемому изобретению по физической сущности и достигаемому результату является аксиальный индукционный регулятор (см. патент №2168785, 2001 г., Бюл. №16, авторы Гайтов Б.Х., Кашин Я.М и др.), содержащий два тороидальных магнитопровода с пазами, в которые уложены первичная и вторичная трехфазные обмотки, начала которых электрически соединены между собой посредством скользящих контактов, а тороидальный магнитопровод с первичной обмоткой, соединенной в “звезду”, выполнен поворотным относительно неподвижного тороидального магнитопровода со вторичной обмоткой, для чего установлена червячная передача, жестко связанная с поворотным магнитопроводом, причем между магнитопроводами имеется воздушный зазор, необходимый для их взаимного перемещения, а вторичная обмотка выполнена имеющей возможность подключения к нагрузке.
Существенным недостатком такого аксиального индукционного регулятора является наличие большого воздушного зазора между магнитопроводами, в пазы которых уложены первичная или вторичная обмотки, приводящее к увеличению магнитного сопротивления, а следовательно, к увеличению токов, необходимых для создания требуемого магнитного потока (тока намагничивания), то есть к увеличению требуемого сечения проводов обмоток и, соответственно, к ухудшению массогабаритных показателей индукционного регулятора, увеличению его стоимости и увеличению потерь энергии. Существенным недостатком такого аксиального индукционного регулятора, как и любой аксиальной электрической машины, является также наличие большого осевого (аксиального) электромагнитного усилия, вызванного в результате притяжения неподвижного и поворотного магнитопроводов. Это усилие ведет к преждевременному выходу из строя подшипниковых узлов, что уменьшает надежность работы регулятора, а наличие подшипниковых узлов и червячной передачи, необходимых в прототипе для обеспечения возможности поворота магнитопровода с первичной обмоткой усилием руки оператора и предотвращения его самопроизвольного (электромагнитного) вращения относительно неподвижного магнитопровода со вторичной обмоткой, усложняет конструкцию регулятора в целом. Кроме того, перекос поворотного магнитопровода относительно неподвижного магнитопровода, вызванный большим осевым (аксиальным) электромагнитным усилием, приводит к снижению точности регулирования напряжения.
Данное изобретение решает задачу повышения точности регулирования напряжения, улучшения массогабаритных показателей регулятора, упрощения его конструкции, повышения его надежности, снижения его стоимости и снижения потерь энергии.
Для этого в неподвижном тороидальном магнитопроводе аксиального индукционного регулятора, содержащего неподвижный и поворотный тороидальные магнитопроводы с пазами, в которые уложены первичная и вторичная трехфазные обмотки, начала которых электрически соединены между собой посредством скользящих контактов, выполняются специальные углубления полусферической формы, в которых располагаются неферромагнитные шарики (например, из бронзы), а в поворотном тороидальном магнитопроводе выполняется несколько концентрических канавок, посредством которых поворотный тороидальный магнитопровод надевается на неферромагнитные шарики, опираясь на них, причем диаметр шариков выбирается таким образом, чтобы момент силы трения скольжения, равной f=k·F, где k - коэффициент трения, F=F1+F2, F1 - аксиальное электромагнитное усилие, F2 - гравитационное усилие, был больше электромагнитного момента вращения, возникающего при взаимодействии токов в первичной обмотке с вращающимся магнитным полем, но обеспечивал возможность поворота магнитопровода с первичной обмоткой усилием руки оператора. Это предотвратит самопроизвольное (электромагнитное) вращение магнитопровода с первичной обмоткой при работе регулятора. Пазы поворотного тороидального магнитопровода заливаются немагнитным диэлектрическим материалом, обеспечивающим гладкость его трущейся поверхности. Это предотвратит проваливание шариков в пазы поворотного тороидального магнитопровода. Сечение концентрических канавок выбирается близким к полуокружности диаметром, соответствующим диаметру используемых неферромагнитных шариков.
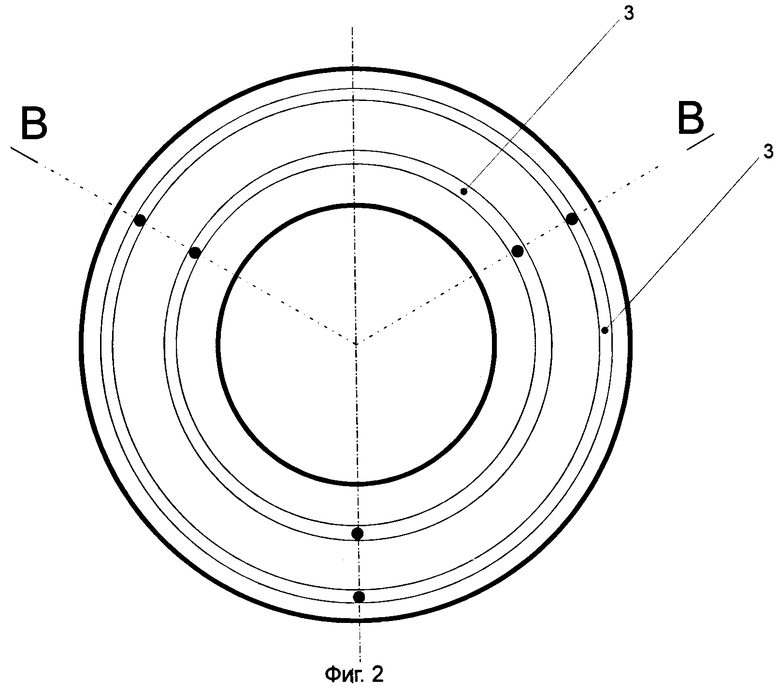
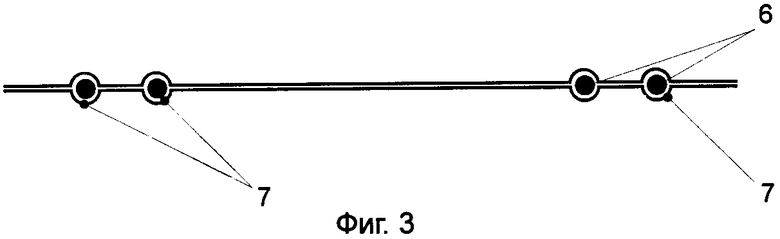
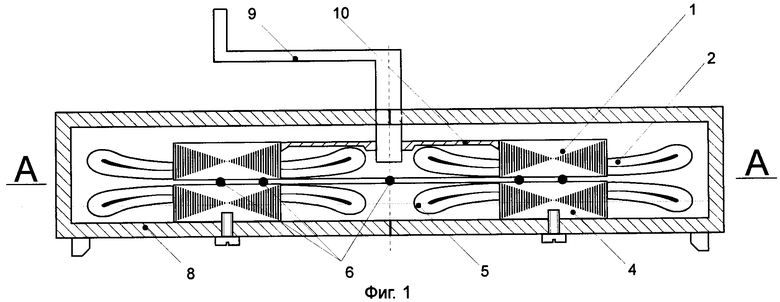
На фиг.1 представлен общий вид предлагаемого аксиального индукционного регулятора в разрезе, на фиг.2 - сечение А-А фиг.1, на фиг.3 - сечение В-В фиг.2, на фиг.4 - схема соединения обмоток аксиального индукционного регулятора, на фиг.5 - ЭДС и токи в одной обмотке, на фиг.6 - векторная диаграмма.
Аксиальный индукционный регулятор содержит (см. фиг.1-4): поворотный тороидальный магнитопровод 1 с первичной трехфазной обмоткой 2 и концентрическими канавками 3 (см. фиг.2), неподвижный тороидальный магнитопровод 4 с вторичной трехфазной обмоткой 5, начало которой электрически соединено с началом первичной трехфазной обмотки 2, неферромагнитные шарики 6, расположенные в специальных углублениях 7 (см. фиг.3) полусферической формы, корпус 8, рукоятку 9, жестко связанную с поворотным магнитопроводом 1 посредством диска 10. Начало первичной трехфазной обмотки 2 поворотного тороидального магнитопровода 1 электрически соединено с началом вторичной трехфазной обмотки 5 неподвижного тороидального магнитопровода 4 посредством скользящего контакта 11 (см. фиг.4).
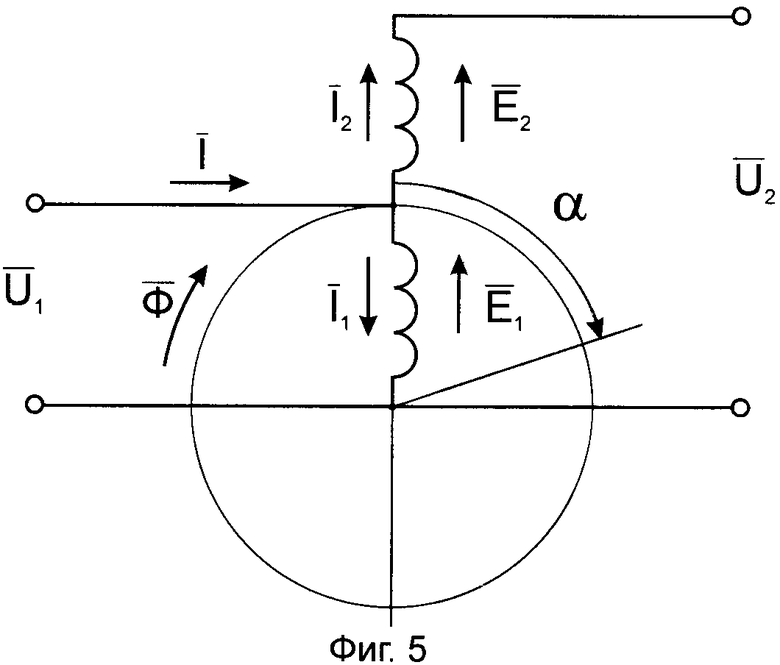
Аксиальный индукционный регулятор работает следующим образом. При подключении первичной трехфазной обмотки 2 поворотного тороидального магнитопровода 1 к питающей сети напряжением U1 в воздушном зазоре аксиального индукционного регулятора создается вращающееся магнитное поле, которое, взаимодействуя с вторичной трехфазной обмоткой 5 неподвижного тороидального магнитопровода 4, наводит в ней систему ЭДС. При пространственном совпадении осей обмоток 2 и 5 соответственно поворотного 1 и неподвижного 4 тороидальных магнитопроводов магнитный поток  (см. фиг.5) одновременно набегает на обмотки 2 и 5 и наводит в них ЭДС
(см. фиг.5) одновременно набегает на обмотки 2 и 5 и наводит в них ЭДС  и
и  совпадающие по фазе и одинаково направленные относительно обмоток. При этом вектор ЭДС
совпадающие по фазе и одинаково направленные относительно обмоток. При этом вектор ЭДС  действует согласно с вектором напряжения
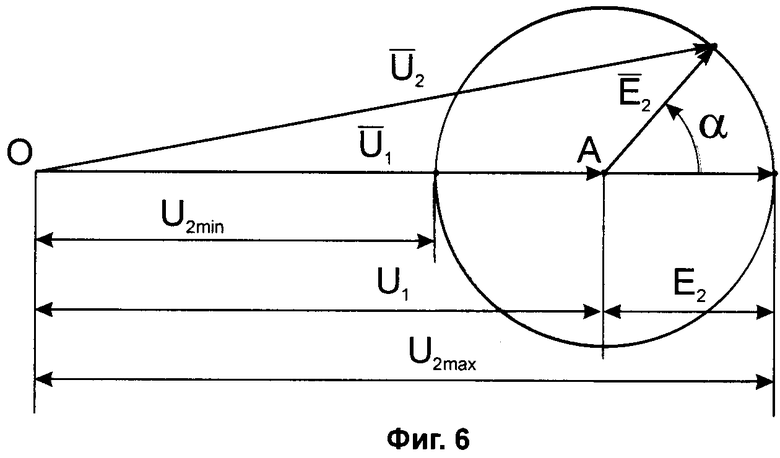
действует согласно с вектором напряжения  Поэтому напряжение U2 (см. фиг.6) на зажимах потребляющей сети представляет собой арифметическую сумму U1 и E2: U2=U2max=U1+е2, т.к. обмотки 2 и 5 электрически соединены между собой, как указано выше. При повороте рукоятки 9, жестко связанной с поворотным тороидальным магнитопроводом 1 посредством диска 10, поворотный тороидальный магнитопровод 1 с обмоткой 2 поворачивается относительно неподвижного тороидального магнитопровода 4 с обмоткой 5 на определенный угол, что приводит к соответствующему повороту вектора ЭДС
Поэтому напряжение U2 (см. фиг.6) на зажимах потребляющей сети представляет собой арифметическую сумму U1 и E2: U2=U2max=U1+е2, т.к. обмотки 2 и 5 электрически соединены между собой, как указано выше. При повороте рукоятки 9, жестко связанной с поворотным тороидальным магнитопроводом 1 посредством диска 10, поворотный тороидальный магнитопровод 1 с обмоткой 2 поворачивается относительно неподвижного тороидального магнитопровода 4 с обмоткой 5 на определенный угол, что приводит к соответствующему повороту вектора ЭДС  (см. фиг.6) обмотки 5 относительно вектора напряжения
(см. фиг.6) обмотки 5 относительно вектора напряжения  подаваемого на обмотку 2 из питающей сети. При повороте поворотного тороидального магнитопровода 1 на угол α=180° получим U2=U2min=U1-Е2. Геометрическое место концов вектора
подаваемого на обмотку 2 из питающей сети. При повороте поворотного тороидального магнитопровода 1 на угол α=180° получим U2=U2min=U1-Е2. Геометрическое место концов вектора  а значит и
а значит и  при изменении угла α есть круг, описанный из точки А, как из центра, радиусом Е2. Результирующее выходное напряжение аксиального индукционного регулятора
при изменении угла α есть круг, описанный из точки А, как из центра, радиусом Е2. Результирующее выходное напряжение аксиального индукционного регулятора 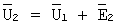 при повороте поворотного тороидального магнитопровода 1 относительного неподвижного тороидального магнитопровода 4 (см. фиг.1) на угол от 0 до 180° изменяется по величине от U2min=U1-Е2 до U2max=U1+E2.
при повороте поворотного тороидального магнитопровода 1 относительного неподвижного тороидального магнитопровода 4 (см. фиг.1) на угол от 0 до 180° изменяется по величине от U2min=U1-Е2 до U2max=U1+E2.
Предлагаемое изобретение, выполняя функцию индукционного регулятора, как и прототип, в то же время в отличие от него позволяет повысить точность регулирования напряжения за счет устранения с помощью шариков перекоса поворотного тороидального магнитопровода относительно неподвижного, вызываемого в прототипе большими аксиальными электромагнитными усилиями, улучшить массогабаритные показатели регулятора, упростить его конструкцию, повысить его надежность и снизить стоимость на 20% за счет замены дорогостоящих подшипниковых узлов и червячной передачи на шарики, снизить потери энергии и улучшить массогабаритные показатели за счет уменьшения воздушного зазора между магнитопроводами.
В сравнении с известной конструкцией индукционного регулятора, основанного на использовании асинхронных машин цилиндрического исполнения с фазным заторможенным ротором, аксиальный индукционный регулятор позволяет значительно упростить технологию изготовления магнитопроводов, существенно сократить при этом расход электротехнической стали. Так, при мощности 5 кВт расход электротехнической стали на изготовление магнитопроводов уменьшается на 20-25%.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФАЗНЫЙ АКСИАЛЬНЫЙ ИНДУКЦИОННЫЙ РЕГУЛЯТОР | 2001 |
|
RU2216091C2 |
| АКСИАЛЬНЫЙ ИНДУКЦИОННЫЙ РЕГУЛЯТОР | 1998 |
|
RU2168785C2 |
| Аксиальный многофазный стабилизируемый трансформатор-фазорегулятор | 2018 |
|
RU2686084C1 |
| Многофазный фазочастотный трансформатор-регулятор | 2018 |
|
RU2689121C1 |
| СДВОЕННЫЙ АКСИАЛЬНЫЙ ИНДУКЦИОННЫЙ РЕГУЛЯТОР | 1999 |
|
RU2170971C2 |
| Асинхронная машина | 2024 |
|
RU2833017C1 |
| Аксиальный преобразователь частоты | 2022 |
|
RU2781082C1 |
| СВАРОЧНЫЙ ТРАНСФОРМАТОР С ВРАЩАЮЩИМСЯ МАГНИТНЫМ ПОЛЕМ | 1998 |
|
RU2178925C2 |
| Бесконтактный стабилизированный по напряжению генератор переменного тока с комбинированным возбуждением | 2019 |
|
RU2713470C1 |
| ДВУХЧАСТОТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2011 |
|
RU2477558C1 |
Изобретение относится к области электротехники и может быть использовано, например, в устройствах для регулирования напряжения. Технической задачей изобретения является повышение точности регулирования напряжения, улучшение массогабаритных показателей регулятора, упрощение его конструкции, повышение его надежности, снижение его стоимости и снижение потерь энергии. Сущность изобретения состоит в следующем. В неподвижном тороидальном магнитопроводе аксиального индукционного регулятора выполнены специальные углубления полусферической формы, в которых располагаются неферромагнитные шарики, в поворотном тороидальном магнитопроводе выполнены несколько концентрических канавок, посредством которых поворотный тороидальный магнитопровод надевается на неферромагнитные шарики, опираясь на них, причем диаметр шариков выбирается таким образом, чтобы момент силы трения скольжения, равной f=k·F, где k - коэффициент трения, F=F1+F2, F1 - аксиальное электромагнитное усилие, F2 - гравитационное усилие, был больше электромагнитного момента вращения, возникающего при взаимодействии токов в первичной обмотке с вращающимся магнитным полем, но обеспечивал возможность поворота магнитопровода с первичной обмоткой усилием руки оператора. Это предотвратит самопроизвольное вращение магнитопровода с первичной обмоткой при работе регулятора. Пазы поворотного тороидального магнитопровода заливаются немагнитным диэлектрическим материалом, обеспечивающим гладкость его трущейся поверхности. 6 ил.
Аксиальный индукционный регулятор, содержащий неподвижный и поворотный тороидальные магнитопроводы с пазами, в которые уложены первичная и вторичная трехфазные обмотки, начала которых электрически соединены между собой посредством скользящих контактов, отличающийся тем, что в неподвижном тороидальном магнитопроводе выполнены специальные углубления полусферической формы, в которых расположены неферромагнитные шарики, а в поворотном тороидальном магнитопроводе выполнены несколько концентрических канавок, посредством которых поворотный магнитопровод надет на неферромагнитные шарики, опираясь на них, причем диаметр шариков выбран таким образом, что момент силы трения скольжения, равной f=k·F, где k - коэффициент трения, F=F1+F2, F1 - аксиальное электромагнитное усилие, F2 - гравитационное усилие, больше электромагнитного момента вращения, возникающего при взаимодействии токов в первичной обмотке с вращающимся магнитным полем, но обеспечивает возможность поворота магнитопровода с первичной обмоткой усилием руки оператора, а пазы поворотного тороидального магнитопровода залиты немагнитным диэлектрическим материалом, обеспечивающим гладкость его трущейся поверхности.
| АКСИАЛЬНЫЙ ИНДУКЦИОННЫЙ РЕГУЛЯТОР | 1998 |
|
RU2168785C2 |
| МНОГОФАЗНЫЙ ТРАНСФОРМАТОР | 1994 |
|
RU2082245C1 |
| ТРАНСФОРМАТОР | 1994 |
|
RU2074435C1 |
| ПОВОРОТНЫЙ ТРАНСФОРМАТОР | 0 |
|
SU235187A1 |
| Тензорезисторный датчик силы | 1986 |
|
SU1395961A1 |
| Устройство для защиты памяти | 1977 |
|
SU680060A1 |

