фиг.1
15
Изобретение относится к силоизмериельной технике и может быть использовано для точного измерения усилий.
Целью изобретения является повышение точности измерения.
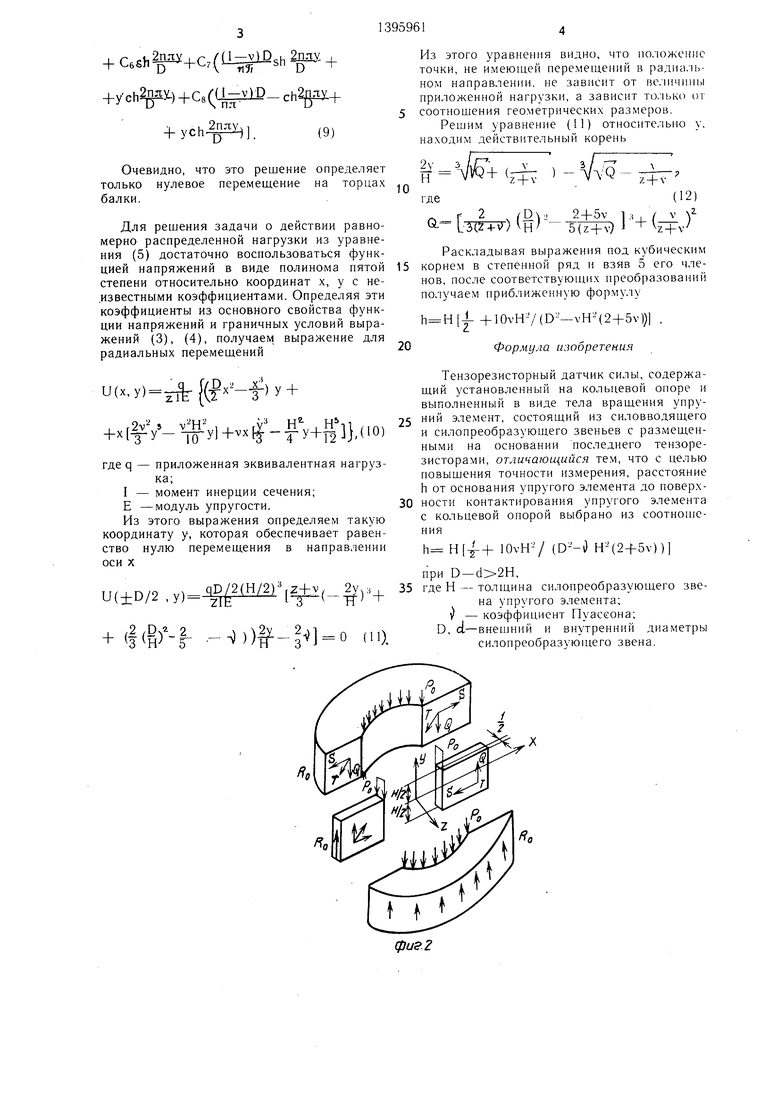
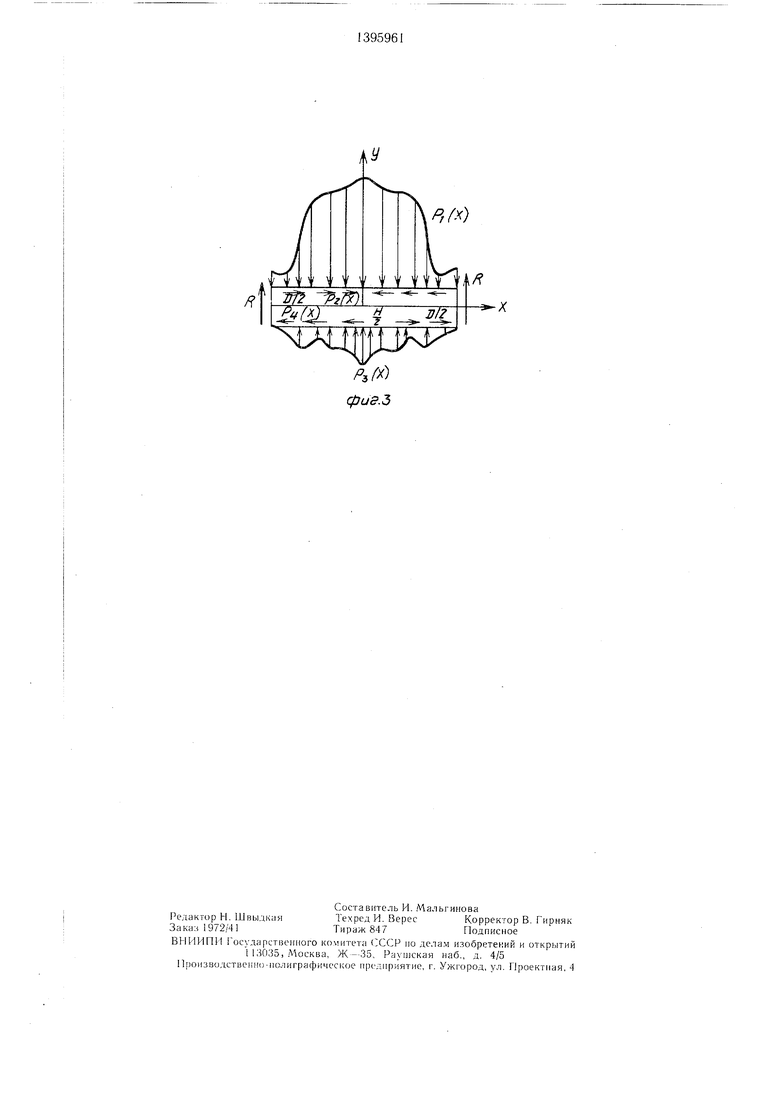
На фиг. 1 изображено конструктивное выполнение датчика; на фиг. 2 -- балка-полоса из круглой пластины силопреобразую- ш.ей части упругого элемента; на фиг. 3 - напряженно-деформируемое состояние балкиолосы, нагруженной распределенной систе- 10 ой сил.
Тензорезисторный датчик силы состоит з силовводяшего звена 1, силопреобразую- его звена 2, выполненного с опорным ыступом и (юдрезисторными верхней 3 и ижней 4 оболочками, на которых размещеы тензорезисторы 5, 6, и установленного на ольцевой опоре 7.
Датчик работает следуюп1,им образом.
Нагрузка Р силовводящим звеном 1 и кольцевой опорой 7 деформирует сило- преобразующее звено 2, в результате чего оно поворачивается вокруг опоры и верхняя оболочка 3 сжимается, а нижняя растягивается, что и преобразуется тензорезисто- рами 5, 6 в изменение электрического сигнала.
Определение места расположения опоры в зависимости от конструктивных параметров атчика осуществляется на основании известных зависимостей.
30
U(x,y)
U(x,y)
оЛх, у)
-ху
20
25
40
Так как в упругом элементе основным си- лопреобразующим звеном является кольцевая пластина (фиг. 1), рассмотрим ее напряженно-деформируемое состояние. Для этого из круглой пластины, основного сило- преобразующего звена упругого элемента, 35 мысленно вырежем балочку единичной толщины, проходящую через центр пластины, к которой приложены некоторая внешняя нагрузка РО, распределенная на верхнем ее торце, и реакция опор Ro. Действие отброшенных частей пластины заменим некоторой системой сил Т, Q, S (фиг. 2). Заменим теперь систему сил Т, Q, S, действующую в плоскостях разреза, на эквивалентную ей систему сил P|(x), Р2(х), РЗ(Х), Р4(х), действующую уже в торцовых плос- дд костях балки. Таким образом, приходим к задаче об определении напряженно-деформированного состояния свободно опертой балки-полоеы, загруженной некоторой распределенной системой сил Pi(x), Р2(х), РЗ(Х), PJ(X) (фиг. 3), воспользуемся функ- 50 цией напряжений, представленной рядом Фурье
о
ф(х, sinot,,x(Cichc «y-|-C2shc,,y-|-|-C3ychc -,,y;bC.iyshc,,,y) -|-cosc ,,x (C5chc,,y-|- -|-Сб5ИсХ„у-ЬС7усН«„у+С8у8Ьсл„у) .55
Соответствующие компоненты напряжений
и перемещений через функцию напряженийU(x, у):
определяются по известным формулам
Грани ронах со запишем roy(x,iL
1
,,(х,|
на свобо аЛ±0/2
Для циентов грузку, ния (3),
Р,„(х)2
где коэф ся по из
А„„
В„,„
Так образую тывает о нее дейс S нечет Следоват ма сил P
действую дает ука ражения
А2„
Из выра напряже нужно в
С,
Подс (2) с уч ражение ряда по
U(x,y) -5((l- 1)3ф(х, у) .
v
-V)
,l2Ll dxar
дх
U(x,y) i±((l-v)(p(x, у)-). V- J- Л
оЛх, у)
-ху
(х,у
((х, у) , ..,, ду -
,.) Ч (х,у)
Граничные условия на продольных сторонах согласно схеме нагружения (фиг. 3) запишем в виде roy(x,iL)-P2(x) fay(x,f) -P4(x)
1I(2)
,,(х,|-) -Рл,(Х), (т.,(х,) -РЗ (X)
на свободно отпертых концах аЛ±0/2,у)0,т,,(±0/2,у) + R(y)
(4)
Для определения неизвестных коэффициентов С, в выражении (1) разложим нагрузку, стоящую в правых частях уравнения (3), в тригонометрический ряд Фурье
Р,„(х)2 (А, + В„„со5),(5) п оии
(,2, 3, 4),
где коэффициенты Атп и Вт„ определяются по известным зависимостям
У2
2wix
P,(x),
-0/2.
Ife
I- Pm(x)COS
-Vz
2пях
dx.
(6)
U(x, у):
Так как круглая пластина в силопре- образующем звене упругого элемента испытывает осесимметричную деформацию, то на нее действует нагрузка РО, Q, Т четная и S нечетная относительно плоскости OYz. Следовательно, и эквивалентная им система сил Pl(x), Р2(Х), РЗ(Х), Р4(Х) (фиг. 3),
действующая на балку-полосу, также обладает указанным свойством, а тогда из выражения (6) получаем
А2„ А4« Bi,, Вз„ О .(7)
Из выражения (12) следует, что функция напряжений является четной, а для этого нужно выполнить условие
С, О .(8)
Подставляя выражение (1) в уравнение (2) с учетом уравнения (8), получаем-выражение для перемещения U(x, у) в виде ряда по тригонометрическим функциям
+ Е sin. 2njtXrr ц2пду, «и DD f-cf} +V W U W f 1
Ш
ws:
Nt Q|J|Xi
Л А)
вм
7Г
NjX
|J|Xi
Л А)
фиё.д
| название | год | авторы | номер документа |
|---|---|---|---|
| Тензорезисторный датчик силы | 1983 |
|
SU1139980A1 |
| Датчик растяжения-сжатия | 1990 |
|
SU1744523A1 |
| Тензорезисторный датчик силы | 1990 |
|
SU1760392A1 |
| Датчик силы | 1989 |
|
SU1647294A1 |
| Трехкомпонентный измеритель усилия | 1984 |
|
SU1190216A1 |
| Система терминального управления пространственным угловым маневрированием | 1988 |
|
SU1613999A1 |
| Устройство для измерения массы нетто груза | 1989 |
|
SU1797696A3 |
| Датчик силы | 1991 |
|
SU1760401A1 |
| ТЕНЗОМЕТРИЧЕСКИЕ ВЕСЫ | 2015 |
|
RU2599906C1 |
| Тензометрический динамометр продольной силы | 1990 |
|
SU1760395A1 |
Изобретение относится к силоизмери- тельной те.хнике и позволяет повысить точность измерений. Выполненный в виде тела враш.ения упругий элемент состоит из силовводящего 1 и силопреобразующего 2 звеньев. Воздейств}1е нагрузки на звено 1 вызывает деформацию звена 2, установленного на кольцевой опоре 7. ТензорезиСто- ры 5, 6 преобрзуют сжатие оболочки 3 и растяжение оболочки 4 в электрические сигналы. Приведено соотношение, из которого выбирается расстояние от основания упругого элемента до повер.хности контактирования его с кольцевой опорой 7. 3 ил.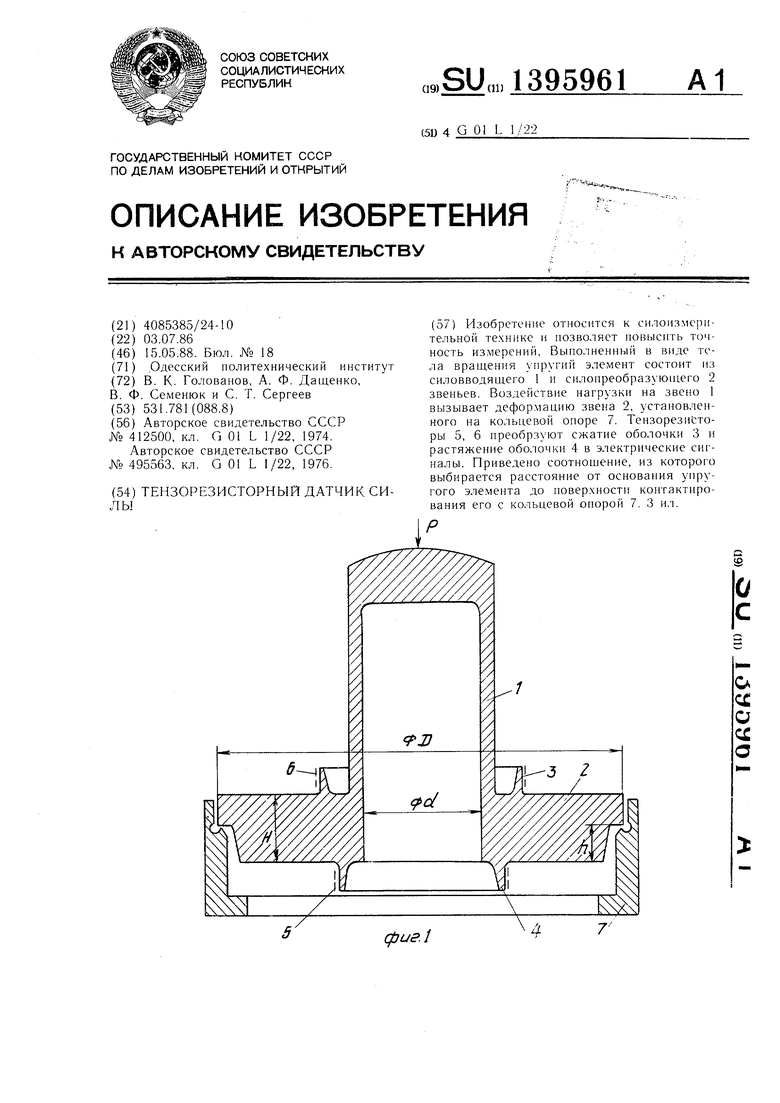
| 1971 |
|
SU412500A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Силоизмерительный тензорезисторный датчик | 1973 |
|
SU495563A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
