Изобретение относится к дифференциальным винтовым передачам и может применяться, в частности, в испытательной технике при испытании образцов на растяжение при постоянной скорости деформирования.
Известен дифференциальный винтовой механизм (а.с. 1216519 F 16 Н 37/16, 1986 г.) Он содержит корпус, расположенную в корпусе с возможностью вращения гайку, взаимодействующий с гайкой винт, установленный с возможностью осевого перемещения, кинематическую цепь, представляющую собой две пары зубчатых колес, связывающих винт с гайкой таким образом, что колесо, сидящее на винте, сопряжено с колесом, сидящим на валу, а следующее колесо, сидящее на валу, сопряжено с колесом, сидящем на гайке.
Недостатком данного механизма является то, что он может применяться в устройствах для получения сверхмедленных перемещений в течение лишь малого отрезка времени.
Наиболее близким к предлагаемому решению является дифференциальный механизм (а. с. 2123628, F 16 Н 48/02, 1998 г.). Он содержит корпус, расположенную в корпусе с возможностью вращения гайку, взаимодействующий с гайкой винт, установленный с возможностью осевого перемещения, кинематическую цепь, представляющую собой две пары зубчатых колес на параллельных валах, связывающих винт с гайкой таким образом, что колесо, сидящее на винте, сопряжено с колесом, сидящим на валу, а следующее колесо, сидящее на валу, сопряжено с колесом, сидящим на гайке, причем колеса, сидящие соответственно на гайке и на валу, имеют число зубьев z, сопряженные с ними колеса, соответственно, следующее: сидящее на валу имеет число зубьев (z-1), а сидящее на винте - (z+1).
Данный механизм позволяет получать сверхмедленные перемещения, но дает возможность получения лишь ограниченного хода винта.
Технический результат - расширение технологических возможностей, а именно: обеспечение длительных реверсивных сверхмедленных перемещений рабочего органа.
Поставленная задача достигается тем, что в дифференциальном механизме, содержащем корпус, расположенную в корпусе с возможностью вращения гайку, взаимодействующий с гайкой винт, установленный с возможностью осевого перемещения, кинематическую цепь, включающую две пары зубчатых колес, связывающих винт с гайкой, причем две пары зубчатых колес выполнены в виде сдвоенной ортогональной негипоидной передачи, цилиндрическое колесо, сидящее на винте, и цилиндрическое колесо, сидящее на гайке, сопряжены посредством цельного плоского колеса с двумя венцами зубьев, а колеса ортогональных негипоидных передач имеют числа зубьев соответственно: сидящее на винте - (z-1), сопряженный с ним венец плоского колеса - z; сидящее на гайке - z, сопряженный с ним венец плоского колеса - (z+1), где z - натуральное число в интервале от 12 до 99. Передаточное отношение дифференциального механизма определяется по следующей формуле:
где iдвг - условное передаточное отношение механизма, значение которого показывает, во сколько раз уменьшается осевая скорость винта в указанном механизме по сравнению с вариантом, где двигатель вращает непосредственно гайку при невращающемся винте;
iдвг=iдг/(iвг-1) (здесь iдг и iвг - передаточные отношения от приводного вала к гайке и от винта к гайке:
iдг=-z5/z8; iвг=(z7/z4)•(z5/z8)
z4, z5, z7, z8 - числа зубьев колес, номера которых соответствуют индексам.
Числа зубьев колес z4, z5, z7, z8 принимаются в интервале от 12 до 99 исходя из условия исключения подрезания зубьев в процессе изготовления колес и обеспечения требуемой точности передач при малых габаритах.
Для получения сверхмедленного длительного перемещения требуется большое значение передаточного отношения iдвг. Для этого необходимо, чтобы знаменатель в формуле (1) стремился к нулю. В свою очередь, это возможно при соблюдении условия:
При этом значения дробей должны быть как можно более близкими к целым числам, но не равными им (отличия в 4...7 знаках после запятой). При увеличении значения дробей в формуле (2) растут габариты дифференциального механизма.
Исходя из вышеизложенного, примем:
Представим дроби (3) в виде:
Таким образом, значения дробей (4) стремятся к единице, если числа зубьев в этих дробях удовлетворяют зависимостям:
z4=z-1 - z7=z
z5=z - z8=z+1
На чертеже изображена схема предлагаемого дифференциального механизма.
Дифференциальный механизм состоит из корпуса 1, винта 2, гайки 3, цилиндрических зубчатых колес 4 и 5, расположенных соответственно на винте 2 и гайке 3, плоского колеса 6 с зубчатыми венцами 7 и 8, вала 9.
Колесо 4 на винте 2 имеет количество зубьев (z-1), сопряженный с колесом 4 венец 7 плоского колеса 6 на валу 9 имеет число зубьев z, венец 8 плоского колеса 6 на валу 9 имеет число зубьев (z+1), сопряженное с венцом 8 колесо 5 на гайке 3 имеет число зубьев z.
Работа механизма заключается в том, что при вращении вала 9 (например, от электродвигателя) венцы 7 и 8 плоского колеса 6 приводят во вращение сопряженные с ними цилиндрические колеса 4 и 5 и связанные с ними соответственно винт 2 и гайку 3. Винт 2 и гайка 3 вращаются в одну сторону, но с разной скоростью в связи с тем, что передаточные отношения между зубчатыми венцами (7-4) и (8-5) отличаются благодаря разному числу зубьев ведущих и ведомых колес ортогональных негипоидных передач. Реверсирование осевого движения винта осуществляется изменением направления вращения вала 9.
В результате сложения вращательных движений винта 2 и гайки 3 скорость осевого (вправо либо влево) перемещения винта 2 относительно гайки 3 может быть крайне мала и определяется следующей формулой:
где ωд - угловая скорость приводного вала;
h - ход винта.
Скорость осевого перемещения V винта 2 в предлагаемом дифференциальном механизме по отношению к скорости осевого перемещения винта 2, непосредственно связанного с двигателем, уменьшается в (z2-z) раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ | 2005 |
|
RU2303184C2 |
| СВЯЗЬ ДЛЯ СОЗДАНИЯ В ВИСЯЧИХ КОНСТРУКЦИЯХ ПОСТОЯННОГО ПРИ ТЕМПЕРАТУРНЫХ И ДРУГИХ ПЕРЕМЕЩЕНИЯХ РАСПОРА | 2000 |
|
RU2186899C2 |
| Штанговая глубинно-насосная установка | 2002 |
|
RU2224909C2 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЗУБЧАТЫХ ПЕРЕДАЧ ПО СХЕМЕ ЗАМКНУТОГО КОНТУРА | 2002 |
|
RU2221997C1 |
| КОРПУС ПОДВОДНОЙ ЛОДКИ, ПРЕДВАРИТЕЛЬНО НАПРЯЖЕННЫЙ ПОСТОЯННЫМ УСИЛИЕМ | 2000 |
|
RU2200106C2 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ НА УСТАЛОСТЬ УЗЛА РАМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2188406C1 |
| ЗУБЧАТЫЙ ВАРИАТОР НЕФРИКЦИОННОГО ТИПА | 2008 |
|
RU2385430C1 |
| СПОСОБ ИСПЫТАНИЯ ИЗДЕЛИЙ НА ГЕРМЕТИЧНОСТЬ | 2002 |
|
RU2206879C1 |
| ВИБРАЦИОННЫЙ СМЕСИТЕЛЬ | 2002 |
|
RU2216395C2 |
| СТЕНД ДЛЯ УСТАЛОСТНЫХ ИСПЫТАНИЙ ОБРАЗЦОВ | 2006 |
|
RU2327134C1 |
Изобретение относится к дифференциальным винтовым передачам и может применяться, в частности, в испытательной технике при испытании образцов на растяжение при постоянной скорости деформирования. В корпусе дифференциального механизма расположены гайка, винт, установленный с возможностью осевого перемещения, кинематическая цепь, включающая две пары зубчатых колес, связывающих винт с гайкой. Две пары зубчатых колес выполнены в виде сдвоенной ортогональной негипоидной передачи. Цилиндрическое колесо, сидящее на винте, и цилиндрическое колесо, сидящее на гайке, сопряжены посредством цельного плоского колеса с двумя венцами зубьев. Колеса ортогональных негипоидных передач имеют число зубьев соответственно: сидящее на винте - (z-1), сопряженный с ним венец плоского колеса - z; сидящее на гайке - z, сопряженный с ним венец плоского колеса - (z+1), где z - натуральное число в интервале 12 - 99. Технический результат - расширение технологических возможностей заключается в обеспечении длительных реверсивных сверхмедленных перемещений рабочего органа. 1 ил.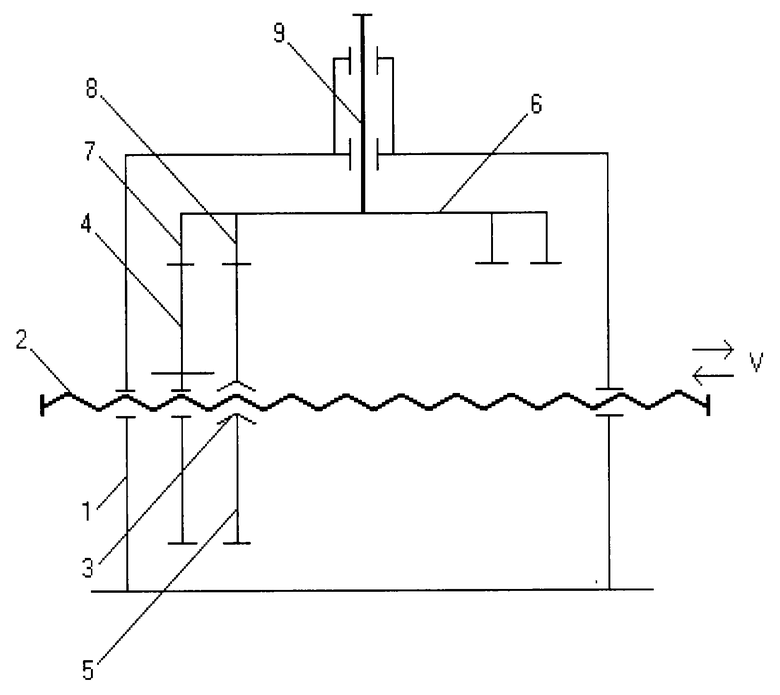
Дифференциальный механизм, содержащий корпус, расположенную в корпусе с возможностью вращения гайку, взаимодействующий с гайкой винт, установленный с возможностью осевого перемещения, кинематическую цепь, включающую две пары зубчатых колес, связывающих винт с гайкой, отличающийся тем, что пары зубчатых колес выполнены в виде сдвоенной ортогональной негипоидной передачи, причем цилиндрическое колесо, сидящее на винте, и цилиндрическое колесо, сидящее на гайке, сопряжены посредством цельного плоского колеса с двумя венцами зубьев, а колеса ортогональных негипоидных передач имеют числа зубьев соответственно: сидящее на винте - (z-1), а сопряженный с ним венец плоского колеса - z; сидящее на гайке - z, а сопряженный с ним венец плоского колеса - (z+1), где z - натуральное число в интервале 12-99.
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ | 1994 |
|
RU2123628C1 |
| Механизм для преобразования вращательного движения в одновременные вращательное и возвратно-поступательное | 1984 |
|
SU1216519A1 |

