Изобретение относится к дифференциальным винтовым передачам и может применяться, в частности, в испытательной технике при испытании образцов на растяжение при постоянной скорости деформирования.
Известен дифференциальный винтовой механизм (Пат. 2123628 RU, МПК7 F16H 48/02, опубл. 1998).
Он содержит корпус, расположенную в корпусе с возможностью вращения гайку, взаимодействующий с гайкой винт, установленный с возможностью осевого перемещения в обе стороны, кинематическую цепь, представляющую собой две ортогональные негипоидные передачи, связывающие винт с гайкой таким образом, что колесо, сидящее на винте, сопряжено с колесом, сидящим на валу двигателя, а следующее колесо, сидящее на валу двигателя, сопряжено с колесом, сидящим на гайке.
Известный дифференциальный винтовой механизм позволяет создавать винтом большие осевые силы при относительно малой скорости перемещения винта.
Недостатком данного механизма является параллельное расположение вала двигателя относительно винта, что не дает возможности передачи движения между валами, оси которых пересекаются.
Наиболее близким к предлагаемому решению является дифференциальный механизм (Пат. 2216666 RU, МПК7 F16H 37/16, 48/02, опубл. 2003), содержащий корпус, расположенную в корпусе с возможностью вращения гайку, взаимодействующий с гайкой винт, установленный с возможностью осевого перемещения в обе стороны, кинематическую цепь, представляющую собой две ортогональные негипоидные передачи, связывающие винт с гайкой таким образом, что колесо, сидящее на винте, сопряжено с колесом, сидящим на валу двигателя, а следующее колесо, сидящее на валу двигателя, сопряжено с колесом, сидящим на гайке.
Данный механизм позволяет передавать движение между валами, оси которых пересекаются, но дает возможность получения ограниченного диапазона осевых замедлений винта.
Задача изобретения - обеспечение сверхмедленных осевых перемещений при пересекающихся осях валов приводного двигателя и рабочего органа.
Технический результат - расширение технологических возможностей, а именно расширение диапазона осевых замедлений винта путем передачи движения от вала двигателя к винту и от вала двигателя к гайке посредством двух конических и одной цилиндрической передачи.
Указанный технический результат достигается тем, что в дифференциальном механизме, содержащем корпус, расположенную в корпусе с возможностью вращения гайку, взаимодействующий с гайкой винт, установленный с возможностью осевого перемещения, кинематическую цепь, представляющую собой две кинематические ветви для вращения соответственно винта и гайки и состоящую из трех пар зубчатых колес, связывающих винт с гайкой таким образом, что колесо, сидящее на винте, и колесо, сидящее на гайке, вращаются посредством конических колес, расположенных на параллельных - первом и втором валах, замкнутых между собой при помощи цилиндрической передачи, причем число зубьев конического колеса, сидящего на валу электродвигателя, равно а, произведение числа зубьев конического колеса, сидящего на гайке, и цилиндрического, сидящего на втором валу, определяется выражением а2+3·а+3, а числа зубьев остальных колес определяются выражением а+1, где значение числа а принадлежит рекомендуемому диапазону значений чисел зубьев с интервала от 13 до 157.
На чертеже изображена схема предлагаемого дифференциального механизма.
Дифференциальный механизм состоит из корпуса 1, винта 2, первого вала 5 двигателя 6 и параллельного ему второго вала 4. Гайка 3 расположена в корпусе 1 с возможностью вращения и взаимодействует с винтом 2 посредством кинематической цепи. Кинематическая цепь представляет собой две замкнутые кинематические ветви для вращения соответственно винта 2 и гайки 3. Винт 2 установлен в корпусе 1 с возможностью осевого перемещения. Кинематическая цепь дифференциального механизма состоит из трех пар зубчатых колес z1, z2; z3, z4; z5, z6 и связывает между собой винт 2 и гайку 3. Колесо z1, сидящее на винте 2, и колесо z6, сидящее на гайке 3, вращаются посредством конических колес z2 и z5, расположенных на первом валу 5 двигателя 6 и параллельном ему втором валу 4 соответственно, которые замкнуты между собой при помощи цилиндрической передачи. Число зубьев конического колеса z2 первого вала 5 электродвигателя 6 определяется значением а, где число а принадлежит рекомендуемому диапазону значений чисел зубьев с интервала от 13 до 157 и ограничено возможностью изготовления зубчатых колес. Произведение числа зубьев конического колеса z6, сидящего на гайке 3, и цилиндрического колеса z4, сидящего на втором валу 4, определяется выражением а2+3·а+5, а числа зубьев остальных колес z1, z3 и z5 определяются выражением а+1.
Дифференциальный механизм работает следующим образом.
При вращении первого вала 5 электродвигателя 6 винт 2 и гайка 3 вращаются в одну сторону, но с разными значениями угловых скоростей. Одностороннее вращение винта 2 и гайки 3 и малая разница значений их угловых скоростей является условием для получения медленных значений осевого перемещения винта 2.
В результате сложения вращательных движений винта 2 и гайки 3 перемещение винта 2 относительно гайки 3 может быть крайне мало и определяется следующей формулой (Пат. 2216666 RU, МПК7 F16H 37/16, 48/02, опубл. 2003):

где ωД - угловая скорость вала двигателя, с-1; h - ход винта, м (здесь h=р·n, где р - шаг резьбы винта, м; n - число заходов резьбы винта); iV - функция осевого замедления винта 2, значение которой показывает, во сколько раз уменьшается осевая скорость винта 2 в предложенном механизме по сравнению с вариантом, где двигатель непосредственно вращает гайку 3 при невращающемся винте 2.
Функция осевого замедления винта 2 (Пат. 2216666 RU, МПК7 F16H 37/16, 48/02, опубл. 2003):

где iДГ - передаточное отношение от первого вала 5 двигателя 6 к гайке 3;
iВГ - передаточное отношение от винта 2 к гайке 3 через колеса z1...z6.
Передаточные отношения iДГ и iВГ определяются по известным формулам передаточных отношений:


Подставив формулы (3) и (4) в формулу (2) получим:
где z1...z6 - значения чисел зубьев колес дифференциального механизма, которые, исходя из описания, определяются по следующим зависимостям:

Разность произведений в знаменателе формулы (5) обязательно равна целому (положительному либо отрицательному) числу или нулю. В последнем случае имеем неподвижное исполнительное звено механизма, поскольку функция iV осевого замедления винта 2 принимает значение, равное бесконечности. Для получения конечного и максимального (по модулю) значения функции iV осевого замедления винта 2 знаменатель формулы (5) должен быть равен единице (по модулю). Данное условие обеспечивается зависимостями (6).
Подбор значений чисел зубьев z1...z6 дифференциального механизма требует выполнения большого числа математических операций. Поэтому такую задачу практически решают с помощью ЭВМ. Всего по зависимостям (6) было найдено 50 вариантов сочетаний значений чисел зубьев для значения знаменателя в формуле (5), равного единице (по модулю).
В таблице 1, в качестве примера, представлены 3 варианта сочетаний значений чисел зубьев колес дифференциального механизма и для принятых параметров механизма даны результаты замедления и скорости перемещения винта.
1420
0,003
1
По результатам таблицы 1 можно сделать вывод о том, что по указанным вариантам сочетаний значений чисел зубьев колес скорость перемещения Vв винта 2 в предлагаемом дифференциальном механизме, при сопоставимых значениях чисел зубьев колес, на два порядка меньше скорости перемещения винта известного дифференциального механизма при равных параметрах двигателя и резьбы винта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ УСТАЛОСТНЫХ ИСПЫТАНИЙ ОБРАЗЦОВ | 2006 |
|
RU2327134C1 |
| УСТРОЙСТВО ДЛЯ ПЛАСТИЧЕСКОГО ОБЪЕМНОГО ДЕФОРМИРОВАНИЯ ТРУБ | 2017 |
|
RU2659551C1 |
| ПРИСПОСОБЛЕНИЕ ПРИ ЛЕСОПИЛЬНОЙ РАМЕ ДЛЯ УСТРАНЕНИЯ НАЖИМА НА ДЕРЕВО ТЫЛОВЫМИ ЧАСТЯМИ ЗУБЦОВ ПИЛЫ ПРИ ХОЛОСТОМ ЕЕ ХОДЕ | 1928 |
|
SU16083A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ | 2001 |
|
RU2216666C2 |
| УСТРОЙСТВО ДЛЯ ПЛАСТИЧЕСКОГО ОБЪЕМНОГО ДЕФОРМИРОВАНИЯ МЕТАЛЛИЧЕСКИХ ТРУБ | 2013 |
|
RU2538244C1 |
| БЕЗВОДИЛЬНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2011 |
|
RU2463499C1 |
| 18-скоростная механическая вальная коробка передач, преимущественно для трактора | 2017 |
|
RU2657483C1 |
| УСТРОЙСТВО ДЛЯ НАРЕЗАНИЯ РЕЗЬБЫ НА ТРУБАХ НА УСТЬЕ СКВАЖИН | 2018 |
|
RU2679627C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 1999 |
|
RU2160401C1 |
| СООСНЫЙ РЕДУКТОР | 2013 |
|
RU2529943C1 |
Изобретение относится к машиностроению, в частности к дифференциальным винтовым передачам, и может применяться в испытательной технике при испытании образцов на растяжение при постоянной скорости деформирования. Дифференциальный механизм состоит из корпуса 1, параллельных валов 5 и 4, винта 2, гайки 3. Гайка 3 взаимодействует с винтом 2 посредством кинематической цепи, состоящей из трех пар зубчатых колес. Винт 2 имеет возможность осевого перемещения. Число зубьев конического колеса z2 первого вала 5 электродвигателя 6 определяется значением числа а, выбранного из рекомендуемого диапазона значений чисел зубьев в интервале от 13 до 157. Произведение числа зубьев конического колеса z6, сидящего на гайке 3, и цилиндрического колеса z4, сидящего на валу 4, определяется выражением а2+3·а+3, а числа зубьев остальных колес z1, z3 и z5 определяются выражением а+1. Технический результат - расширение технологических возможностей, а именно расширение диапазона осевых замедлений винта путем передачи движения от вала двигателя к винту и от вала двигателя к гайке посредством двух конических и одной цилиндрической передачи. 1 табл., 1 ил.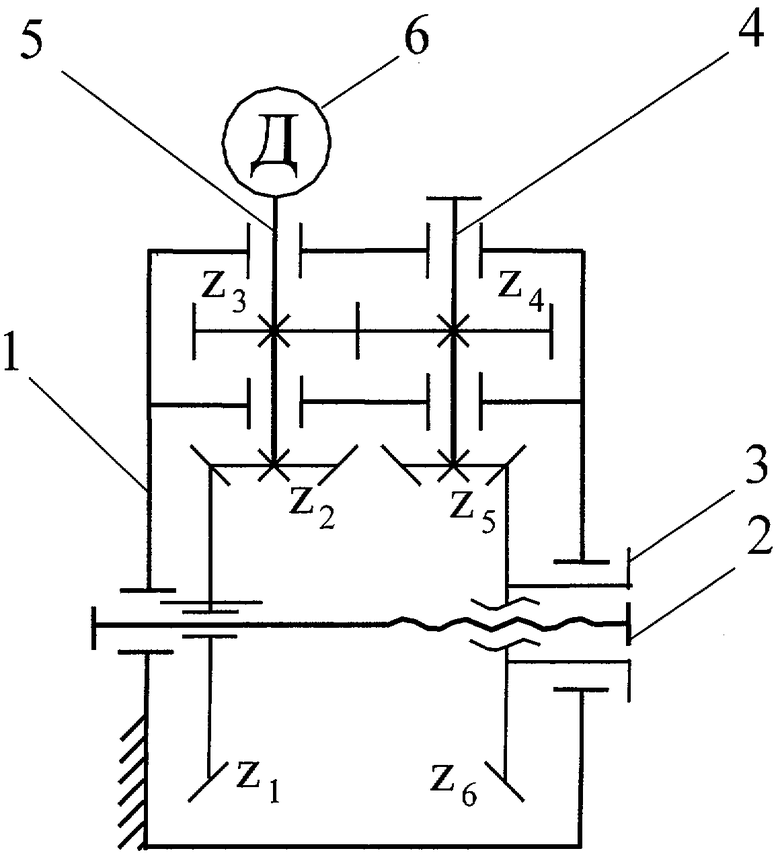
Дифференциальный механизм, содержащий корпус, расположенную в корпусе с возможностью вращения гайку, взаимодействующий с гайкой винт, установленный с возможностью осевого перемещения, кинематическую цепь, представляющую собой две кинематические ветви для вращения соответственно винта и гайки и состоящую из трех пар зубчатых колес, связывающих винт с гайкой таким образом, что колесо, сидящее на винте, и колесо, сидящее на гайке, вращаются посредством конических колес, расположенных на параллельных - первом и втором валах, замкнутых между собой при помощи цилиндрической передачи, причем число зубьев конического колеса, сидящего на валу электродвигателя, равно α, произведение числа зубьев конического колеса, сидящего на гайке, и цилиндрического, сидящего на втором валу, определяется выражением α2+3·α+3, а числа зубьев остальных колес определяются выражением α+1, где значение числа а принадлежит рекомендуемому диапазону значений чисел зубьев с интервала от 13 до 157.
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ | 2001 |
|
RU2216666C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ | 1994 |
|
RU2123628C1 |
| Дифференциальный винтовой механизм | 1986 |
|
SU1397657A1 |
| Механизм для преобразования вращательного движения в одновременные вращательное и возвратно-поступательное | 1984 |
|
SU1216519A1 |

