Изобретение относится к области преобразовательной техники и может использоваться при автоматизации технологических процессов для управления группой параллельно работающих асинхронных электроприводов.
Наиболее близким к предлагаемому технического решению является многозонный интегрирующий развертывающий преобразователь (А.с. 1283801 СССР, G 06 G 7/12. Развертывающий преобразователь./ Цытович Л.И. (СССР). - №3945653/24, заявлено 22.05.85, опубл. 15.01.87, бюл. №2), содержащий (фиг.1) сумматоры 1, 2, группу параллельно работающих интеграторов 3, нечетное число релейных элементов 4-7.
Устройство - прототип характеризуется высокой надежностью в работе и относится к классу систем с самодиагностированием активных компонентов схемы и автоматическим вводом в работу работоспособных элементов.
Недостатком известного технического решения является невозможность автоматического ввода в работу электродвигателей либо других исполнительных механизмов, управляемых выходными сигналами релейных элементов. В результате, обладая собственной высокой надежностью, известное устройство не в состоянии обеспечить автоматическое резервирование управляемых им внешних силовых агрегатов.
Технической задачей изобретения является повышение надежности работы системы управления группой электроприводов.
Поставленная задача достигается за счет того, что в систему управления электроприводами введены n-1 блоков логической функции “Запрет” и n-1 логических элементов функции “2И”, причем первые входы блоков “Запрет” подключены к выходной клемме блока диагностирования, второй вход каждого из блоков “Запрет” соединен с выходом соответствующего из числа n-1 релейных элементов, а выход блоков “Запрет” подключен к информационному входу соответствующего тиристорного регулятора напряжения, первый вход каждого из элементов “2И” соединен с выходом блока питания системы импульсно-фазового управления соответствующего тиристорного регулятора напряжения, второй вход каждого из элементов “2И” подключен к выходу блока селективных защит соответствующего тиристорного регулятора напряжения, выходы элементов “2И” соединены с управляющими входами соответствующих релейных элементов.
Предлагаемая система управления содержит первый сумматор, выход которого соединен с входом интегратора, выход которого подключен к информационным входам группы из n-го числа релейных элементов, причем n≥3 - нечетное число, управляющие входы, содержащиеся у группы из числа n-1 релейных элементов, выходы релейных элементов, подключенные к соответствующим входам второго сумматора, выход которого соединен с первым входом первого сумматора, второй вход которого подключен к источнику сигнала задания, группу из числа n-1 последовательно включенных тиристорного регулятора напряжения, исполнительного электродвигателя и водяного насоса, выход которого соединен с соответствующим входом водяной магистрали, при этом каждый из тиристорных регуляторов включает информационный вход, выход блока питания системы импульсно-фазового управления и выход блока селективных защит от аварийных режимов работы исполнительного электродвигателя, блок диагностирования, состоящий из последовательно включенных делителя частоты, пропорционально-дифференцирующего звена и демодулятора, причем вход делителя частоты соединен с выходом релейного элемента, не содержащего управляющего входа, а выход демодулятора подключен к выходной клемме блока диагностирования, и отличается от известного технического решения тем, что тем что в нее введены n-1 блоков логической функции “Запрет” и n-1 логических элементов функции “2И”, причем первые входы блоков “Запрет” подключены к выходной клемме блока диагностирования, второй вход каждого из блоков “Запрет” соединен с выходом соответствующего из числа n-1 релейных элементов, а выход блоков “Запрет” подключен к информационному входу соответствующего тиристорного регулятора напряжения, первый вход каждого из элементов “2И” соединен с выходом блока питания системы импульсно-фазового управления соответствующего тиристорного регулятора напряжения, второй вход каждого из элементов “2И” подключен к выходу блока селективных защит соответствующего тиристорного регулятора напряжения, выходы элементов “2И” соединены с управляющими входами соответствующих релейных элементов.
Существенным отличием предлагаемого устройства является его повышенная надежность, достигаемая за счет автоматического переключения на резервный канал управления электроприводом, что недоступно для устройства-прототипа. При этом поставленная техническая задача, в отличие от устройства-прототипа, решается за счет блокирования работы релейных элементов, расположенных в прямом канале регулирования замкнутого контура системы управления с помощью логического сигнала, характеризующего готовность работы силового тиристорного регулятора напряжения и исполнительного электродвигателя. Подобное логическое воздействие на элементы прямого канала регулирования формируются в функции состояния комплекса селективных защит регулятора напряжения и наличия напряжения питания его системы импульсно-фазового управления. Данное обстоятельство позволяет считать предлагаемое техническое решение соответствующим критерию “существенные отличия”.
При исследовании предлагаемого устройства по патентной и научно-технической литературе не выявлены технические решения, содержащие признаки, эквивалентные признакам заявляемой системы управления группой электроприводов и, следовательно, данное техническое решение соответствует критерию “новизна”.
Изобретение поясняется следующими чертежами:
Фиг.1 - структурная схема устройства-прототипа.
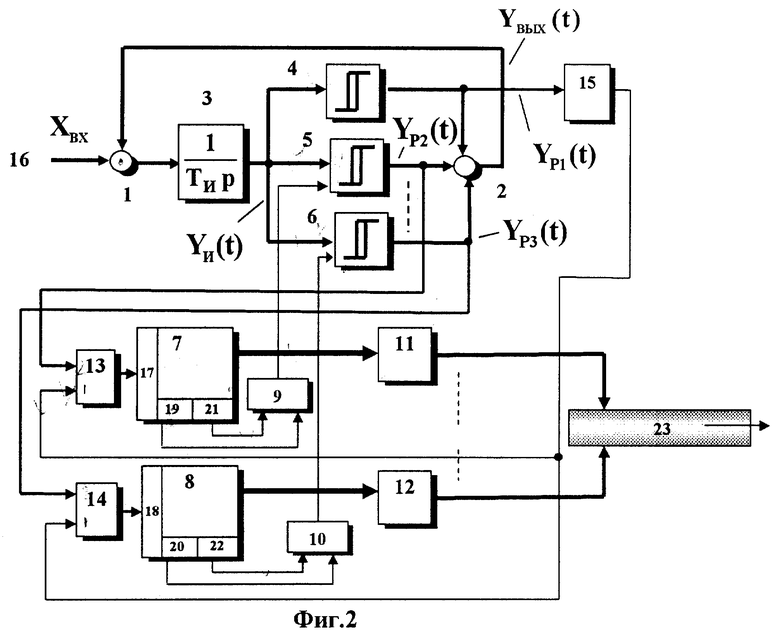
Фиг.2 - структурная схема предлагаемого устройства.
Фиг.3 - функциональная схема тиристорного регулятора напряжения (РН) для плавного пуска асинхронного электродвигателя.
Фиг.4 - функциональная схема блока селективных защит РН.
Фиг.5 - функциональная схема блока диагностики.
Фиг.6 - примеры технической реализации релейного звена и интегратора, их характеристики “вход - выход”.
Фиг.7 - фиг.11 - временные диаграммы сигналов, поясняющие принцип действия предлагаемого устройства.
В состав устройства (фиг.2) входят сумматоры 1, 2, интегратор 3, n-oe нечетное число (п≥3) релейных элементов 4-6, четное n-1 число регуляторов напряжения 7, 8, четное n-1 число блоков логической функции “И” 9, 10, четное n-1 число исполнительных асинхронных электродвигателей 11, 12 (в дальнейшем считаем, что водяные насосы входят в состав блоков 11, 12), четное n-1 число блоков 13, 14 логической функции “Запрет”, блок диагностики 15, клемма 16 для подключения источника сигнала задания. РН 7, 8 содержат входы 17, 18 для подключения источника сигнала задания, выходы 19, 20 для контроля наличия напряжения на выходе источника электропитания системы управления РН, выходы 21, 22 блока селективных защит для контроля аварийного отключения РН. На фиг.2 показана также выходная магистраль 23 для подачи воды на технологический объект.
РН (фиг.3) выполнен по типовой структуре (см., например, Цытович Л.И., Гафиятуллин Р.Х., Маурер В.Г., Рахматулин P.M. Интегрирующая развертывающая система импульсно-фазового управления тиристорными преобразователями для электроприводов с источниками питания ограниченной мощности. Электротехнические системы и комплексы. Межвузовский сб. науч. трудов, МГМА, Магнитогорск, 1996, с.29-38; Гафиятуллин Р.Х., Цытович Л.И., Маурер В.Г., Рахматулин P.M. Комплекс тиристорных преобразователей для плавного пуска асинхронных электродвигателей // Научно-техн. семинар “75 лет отечественной школы электропривода”, тезисы докладов, С.Петербург, 1997, с.50.) и содержит автоматические выключатели силовой 24 и оперативной 25 цепей РН, устройство синхронизации 26 фазосдвигающих устройств 27, - 29, формирователь импульсов управления 30 силовыми тиристорами блока 31, трансформаторы тока 32, включенными в каждую фазу А, В, С напряжения сети, датчик тока 33, реализованный, например, на основе трехфазного мостового выпрямителя, интегральный регулятор тока 34, блок селективных защит 36, источник электропитания 37 элементов системы импульсно-фазового управления РН, блок 31 в каждой фазе содержит ключи, реализованные по схеме “тиристор-тиристор” при их встречно-параллельном включении.
Блок селективных защит (фиг.4) содержит блок 38 контроля за максимальным током статора IMAX исполнительного электродвигателя 11, 12 (максимально-токовая защита), блок 39 времятоковой I(t) (тепловой) защиты электродвигателя, блок 40 защиты от исчезновения фазного напряжения UФ со стороны входа блока 31 (фиг.3), блок 41 контроля за состоянием сопротивления RД обмоток статора асинхронного электродвигателя 11, 12, выходной блок 42 логической функции “ИЛИ-НЕ”, выход которого соединен с клеммами 21, 22 РН 7, 8 (фиг.2). При срабатывании любой из защит соответствующий из блоков 38-41 фиксируется в состоянии логической “1”, обеспечивая тем самым появление “0” на выходе блока 42. Возврат любого из блоков 38-41 в исходное нулевое положение производится путем кратковременного нажатия нормально-разомкнутого ключа “Сброс защит” (фиг.4).
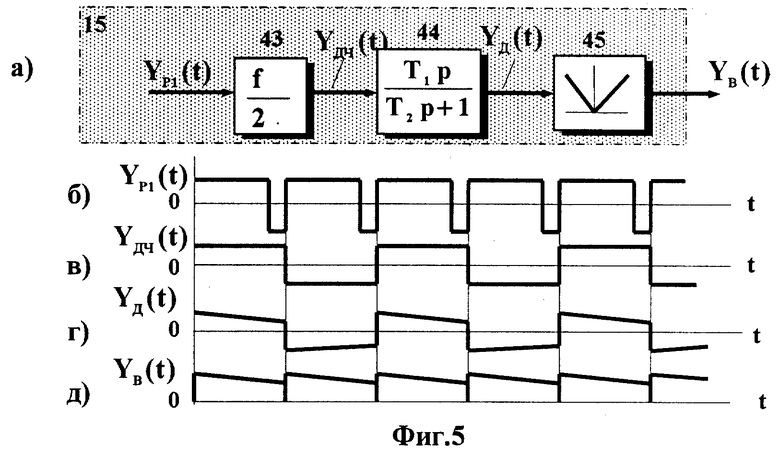
Блок диагностики 15 (фиг.2) содержит (фиг.5а) последовательно включенные делитель частоты 43 с коэффициентом деления 2,0, пропорционально дифференцирующее звено 44 с постоянными времени Т1, Т2 и выпрямитель (демодулятор) 45.
Релейные элементы (РЭ) 4-6 (фиг.2) имеют неинвертирующую гистерезисную характеристику (фиг.6а) и выполнены на основе операционного усилителя 46 (фиг.6б) с положительной обратной связью 49 по напряжению. Порог переключения ±b/n РЭ определяется соотношением сопротивлений резисторов 49, 50. Резистор 50 подключается к выходу интегратора 2. Выходной сигнал РЭ меняется дискретно в пределах ±A/n.
Отличие релейных элементов 5, 6 от РЭ 4 (фиг.2) состоит в наличие у РЭ 5, 6 управляющего входа, при подаче на который сигнала логического “0” РЭ 5, 6 принудительно переводятся в состояние -A/n и теряют управляемость по информационному входу, подключенному к выходу интегратора 3. Пример реализации подобного РЭ показан на фиг.6б. Дополнительный (управляющий вход) РЭ содержит нормально замкнутый контакт 48 исполнительного реле соответствующего из звеньев 9, 10 (на фиг.2 исполнительное реле не показано). В исходном состоянии на неинвертирующий вход усилителя 46 от параметрического стабилизатора 47 (фиг.6б) подается сигнал отрицательной полярности, который принудительно удерживает блок 46 в положении -А/n независимо от знака и уровня напряжения на выходе интегратора 3. Если на всех входах блоков 9, 10 присутствует “1” (фиг.2) контакт 48 (фиг.6б) размыкается, и блок 46 управляется выходным напряжением интегратора 3.
Интегратор 3 (фиг.2) реализуется по типовой схеме на усилителе 51 (фиг.6в). При скачке входного сигнала, например, положительной полярности выходной сигнал звена 3 изменяется линейно со знаком, противоположным знаку входного воздействия (фиг.6г).
На фиг.2, 5, 7-11 введены следующие обозначения:
XBX(t) - входной сигнал, подаваемый на клемму 16 (фиг.2);
YИ(t) - выходной сигнал интегратора 3;
YР1(t), YР2(t), YР3(t) - выходные сигналы релейных элементов 4, 5, 16 соответственно;
±b1, ±b2, ±b3 - пороги переключения релейных элементов 4, 5, 6 соответственно;
±А/3 - амплитуда выходных импульсов релейных звеньев 4, 5, 6 и сумматора 2;
±А - максимальная амплитуда выходного сигнала интегратора 3 и сумматора 2;
Т0i, - период выходных импульсов релейных элементов 4, 5, 6 и сумматора 2;
Yвых(t) - выходной сигнал сумматора 2;
Y0 - среднее значение выходных импульсов Yвых(t) сумматора 2;
Принцип работы устройства следующий.
Звенья 1-6 (фиг.2) в совокупности образуют многозонный интегрирующий развертывающий регулятор (МР) с частотно-широтно-импульсной модуляцией. В общем случае число релейных элементов должно удовлетворять условию n≥3 - нечетное число, причем для получения требуемого числа “k” модуляционных зон необходимо n=2k-1. В дальнейшем ограничимся количеством релейных элементов n=3.
Один из электроприводов, например 7, 11, является рабочим, другой - 8, 12 - резервным. В рассматриваемом устройстве переход системы на резервный канал управления осуществляется автоматически, Деление электроприводов на рабочий и резервный является условным, так как при соответствующем алгоритме включения системы, как будет показано ниже, любой из каналов 7, 11 и 8, 12 может оказаться как в роли рабочего, так и резервного электропривода.
Релейные элементы 4 - 6 имеют симметричную относительно нулевого уровня неинвертирующую петлю гистерезиса (фиг.6 а) и пороги переключения, удовлетворяющие условию  Выходной сигнал всех релейных элементов меняется дискретно в пределах ±А/n (в данном случае ±А/3). Здесь и далее считаем, что коэффициент передачи МР со стороны входа 16 (фиг.2) равен единице, а изменение уровня входного сигнала совпадает с началом очередного цикла развертывающего преобразования (смены знака производной выходного сигнала интегратора 3).
Выходной сигнал всех релейных элементов меняется дискретно в пределах ±А/n (в данном случае ±А/3). Здесь и далее считаем, что коэффициент передачи МР со стороны входа 16 (фиг.2) равен единице, а изменение уровня входного сигнала совпадает с началом очередного цикла развертывающего преобразования (смены знака производной выходного сигнала интегратора 3).
При включении МР и нулевом входном сигнале ХBX релейные элементы 4, 5, 6 устанавливаются произвольным образом, например, в состояние +А/3 (фиг.7в-д). Под действием сигнала развертки YИ(t) с выхода интегратора 3 (фиг.7б) происходит последовательное переключение в положение -А/3 блоков 4,5 (фиг.7в, г, моменты времени t01, t02), после чего меняется направление развертывающего преобразования и сигнал YИ(t) нарастает в положительном направлении. Начиная с момента времени выполнения условия YИ(t)=b1, МР входит в режим устойчивых автоколебаний, когда амплитуда сигнала развертки YИ(t) ограничена зоной неоднозначности релейного элемента 4, имеющего минимальное значение порогов переключения, а РЭ 5, РЭ 6 находятся в статических и противоположных по знаку выходных сигналов YP2(t), YP3(t) состояниях (фиг.7г, д). Выходная координата Yвых(t) MР формируется за счет переключении РЭ 4 (фиг.7в) в первой модуляционной зоне, ограниченной пределами ±А/3 (фиг.7е). При отсутствии ХBX (фиг.7a, t<t0) среднее значение Y0 импульсов YВЫХ(t) равно нулю.
Наличие входной координаты ХBX<(А/3) (фиг.7a, t0<t<t*0) влечет за собой изменение частоты и скважности импульсов YВЫХ(t), так как в интервале t1 (фиг.7в) развертка YИ(t) (фиг.7б) изменяется под действием разности сигналов, подаваемых на сумматор 1 (фиг.7а, е), а в интервале t2-dYИ(t)/dt зависит от суммы этих воздействий. В результате Y0=ХBX (фиг.7е).
Предположим, что в момент времени t*0 сигнал ХBX увеличился дискретно до величины (А/3)<XBX<А (фиг.7а). Это нарушает условия существования режима автоколебаний в первой модуляционной зоне, и МР переходит на этап переориентации состояний РЭ 5, РЭ 6, который заканчивается в момент времени t03, когда РЭЗ переключается в идентичное положение -А/3 (фиг.7д). Координата Yвых(t) достигает уровня - А (фиг.7е), и МР переходит во вторую модуляционную зону, где в интервалах t1, t2 (фиг.7в) скорость формирования развертывающей функции YИ(t) (фиг.7б) также определяется разностью или суммой сигналов, воздействующих на сумматор 1. При этом сигнал Y0 включает постоянную составляющую -А/3 и среднее значение импульсного потока YВЫХ(t) второй модуляционной зоны (фиг.7е). Переход МР из одной модуляционной зоны в другую для малых приращений координаты ХВХ сопровождается переходом системы через характерные точки с нулевым значением частоты несущих колебаний (режим частотно-нулевого сопряжения модуляционных зон).
Модуляционная и амплитудная характеристики МРП для любой i-ой модуляционной зоны определяются соотношениями

где  - нормированное значение порога переключения b1;
- нормированное значение порога переключения b1;
 - нормированная величина входного сигнала МР, причем (2Zi-3)n-1<
- нормированная величина входного сигнала МР, причем (2Zi-3)n-1< ≤(2Zi-1)n-1; n - количество релейных элементов, причем n≥3 - нечетное число; Zi=1, 2, 3... - порядковый номер модуляционной зоны; γ=t1/(t1+t2) - скважность выходных импульсов МР; ±А - максимальная амплитуда выходного сигнала МР; ТИ - постоянная времени интегратора.
≤(2Zi-1)n-1; n - количество релейных элементов, причем n≥3 - нечетное число; Zi=1, 2, 3... - порядковый номер модуляционной зоны; γ=t1/(t1+t2) - скважность выходных импульсов МР; ±А - максимальная амплитуда выходного сигнала МР; ТИ - постоянная времени интегратора.
Запуск РН 7, 8 (фиг.2) производится сигналом положительной полярности с выхода соответствующего из релейных элементов 5, 6 (логическая “1”) при условии, что на выходе блока 15 присутствует “1”. В противном случае выходной сигнал блоков 13, 14 равен “0” и регуляторы напряжения 7, 8 выключены. Для варианта n=3 сигнал задания на клемме 16 равен нулю. При этом величина пускового тока электродвигателей 11, 12 ограничивается за счет контура отрицательной обратной связи по току в РН на заранее заданном уровне (фиг.3). Тем самым достигается плавный (“мягкий”) пуск исполнительных механизмов системы управления и повышается срок их безотказной работы. Останов (торможение) электродвигателей 11, 12 осуществляется на “выбеге” при формировании импульса отрицательной полярности на выходе соответствующего из блоков 5, 6, либо нулевом уровне напряжения на выходе блока 15, когда элементы функции “Запрет” закрываются.
Рассмотрим принцип действия МР при последовательных катастрофических отказах релейных элементов 4, 5, 6 (фиг.8), когда они в результате своей неработоспособности самопроизвольно устанавливаются в неуправляемое состояние +A/3 или -А/3.
При переходе РЭ 4 в неуправляемое состояние YP1(t)=-A/3 (фиг.8б, момент t01) сигнал развертки YИ(t) (фиг.8а) продолжает нарастать в положительном направлении, осуществляя поиск работоспособного РЭ. Начиная с момента времени t1, когда YИ(t)=b2 (фиг.8а), в режим автоколебаний входит РЭ 5 (фиг.8в), а сигнал YИ(t) изменяется в пределах ±b2 (фиг.8а).
Если в момент t02 сигнал YP2(t)=А/3=const (фиг.8в), то выходные сигналы РЭ 4, РЭ 5 взаимно компенсируются (фиг.8б, в), а автоколебания возникают в тракте РЭ 6 (фиг.8а, г, д, момент времени t2). Однако в случае перехода РЭ 5 в неуправляемое состояние -А/3 (фиг.8в, момент t02, пунктир) МР теряет свою работоспособность. При этом выходной сигнал интегратора 3 нарастает в положительном направлении (фиг.8а, пунктир), выходной сигнал РЭ 6 фиксируется в положении +А/3 (фиг.8г), что в итоге приводит к формированию на выходе сумматора 2 статического сигнала -А/3 (фиг.8д пунктир). В результате выходное напряжение интегратора 3 достигает величины зоны “насыщения” А его операционного усилителя (фиг.8а, пунктир).
Последовательные “единичные” по выходу “катастрофические” отказы релейных элементов не нарушают работоспособности непосредственно МР, однако приводят к снижению его частоты автоколебаний (полосы пропускания), так как Т03>Т02>Т01 (фиг.8д). Подробно режимы автоматического резервирования в МР рассмотрены в работе: Цытович Л.И. Многозонный развертывающий преобразователь с адаптируемой в функции неисправности активных компонентов структурой // Приборы и техника эксперимента. - М.: АН СССР, 1988. - №1. - С.81-85. Сохранение МР своей работоспособности при отказах РЭ объясняется замкнутым характером его структуры и наличием интегратора в прямом канале регулирования.
Применительно к рассматриваемому устройству (фиг.2) отказ РЭ 4 является аварийным режимом работы системы, так как РН 7, 8 требует воздействия на их информационные входы 17, 18 не импульсного сигнала, а сигнала задания постоянного уровня. Поэтому, несмотря на сохранение работоспособности МР при последовательных отказах РЭ, в случае неработоспособности РЭ 4 регуляторы напряжения 7, 8 должны быть переведены в отключенное состояние. Для этой цели служит блок диагностики 15 (фиг.2, фиг.5а).
Делитель частоты 43 синхронизирован, например, с передним фронтом выходных импульсов РЭ 4 (фиг.5б, в). В результате на выходе блока 43 независимо от скважности выходных импульсов РЭ 4 формируется сигнал со средним нулевым значением. Параметры звена 44 выбираются таким образом, чтобы передать на вход демодулятора 45 импульсы YДЧ(t) с минимальными искажениями (фиг.5в, г). С помощью демодулятора (выпрямителя) 45 сигнал Yд(t) (фиг.5г) выпрямляется (фиг.5д) и, в случае необходимости, дополнительно фильтруется (сглаживающий фильтр на фиг.5а не показан). Таким образом формируется напряжение логической “1”, соответствующее исправному состоянию МР.
При отказе РЭ 4 на его выходе появляется статический сигнал. Переключения делителя частоты 43 прекращаются и на выходе звеньев 44, 45 присутствует сигнал логического “0”, свидетельствующий о неработоспособности МР.
Пример реализации блока диагностирования показан на фиг.8е. Делитель частоты 43 (фиг.5а) выполнен на счетном триггере 54, его согласование с выходом РЭ 4 осуществляется с помощью транзистора 52. Ключ 53 осуществляет усиление мощности выходного сигнала триггера 54. Звено 44 реализуется на конденсаторе 55. Функции выпрямителя 45 выполняет диод 56. Сглаживание пульсаций напряжения на выходе диода 55 производится конденсатором 57. Данный вариант построения блока диагностирования МР позволяет реализовать принцип его самодиагностирования, который заключается в том, что канал диагностирования должен формировать командный сигнал не только в случае выхода из строя диагностируемого объекта, но и в режиме собственной неработоспособности. Элементы блоков 44, 45 (фиг.5а) реализуются на пассивных компонентах (фиг.8е), которые могут быть выбраны с достаточно большим запасом по эксплуатационным параметрам. Это позволяет считать их практически “идеальными” (с позиций надежности) элементами. Тогда отказ любого из активных компонентов 52, 53, 54 приведет к появлению на входе блока 44 статического напряжения, что вызовет формирование логического “0” на выходе блока диагностики 15.
Рассмотрим процессы запуска и работы системы в целом (фиг.2).
Остановимся на первом варианте работы электроприводов. При включении МР и отключенных РН 7, 8 релейные элементы 4, 5, 6 находятся в статических состояниях, причем YP1(t)=+A/3, Yp2(t)=Yp3(t)=-A/3 (фиг.9б-г). Это вызвано тем, что РЭ 5, 6 принудительно блокированы сигналами “0” с выхода блоков 9, 10, а релейный элемент 4 управляется положительным по знаку напряжением “насыщения” +А интегратора 3 (фиг.9а), сформированным под действием результирующего выходного сигнала -А/3 сумматора 2 (фиг.9д). На выходе блока 15 присутствует “0”, что блокирует работу элементов “Запрет” 13, 14.
При одновременном включении РН 7, 8 и появлении “1” на выходах блоков 9, 10 релейные элементы 5, 6 деблокируются и под действием положительного выходного сигнала интегратора 3 в момент времени t0 переключаются в состояние +А/3 (фиг.9а, б, в). На выходе сумматора 2 появляется импульс +А (фиг.9д), так как все РЭ находятся в идентичных состояниях (фиг.9б-г). Выходной сигнал интегратора 3 изменяется в отрицательном направлении и при YИ(t)=-b1 переключается РЭ 4 (фиг.9а, б). Амплитуда сигнала становится равной YВЫХ(t)=A/3 (фиг.9д), что снижает темп изменения напряжения на выходе интегратора 3 (фиг.9а). После срабатывания РЭ 5 (фиг.9а, в) изменяется знак напряжения на выходе сумматора 2 (фиг.9д), и МР входит в режим устойчивых автоколебаний в тракте РЭ 4. После появления сигнала “1” на выходе блока диагностики 15 открываются элементы 13, 14 и запускается РН 8 с электродвигателем 12. В данном случае канал 7, 11 является резервным.
Рассмотрим второй случай ввода системы управления в работу (фиг.10). Считает, что первым включается РН 7. Тогда РЭ 5 становится управляемым и переключается в состояние +А/3 под действием выходного сигнала интегратора 3 (фиг.10а, в, момент времени t1). Выходные сигналы РЭ5, РЭ 6 взаимно компенсируются (фиг.10в, г) и автоколебательный режим возникает в канале РЭ 4 (фиг.10б, д), что приводит к переходу в открытое состояние блока 13 и запуску электродвигателя 11. После включения питания системы импульсно-фазового управления РН 8 находится в выключенном положении, так как на его вход 18 воздействует сигнал -А/3 (логический “0”) (фиг.10г). В данном случае рабочим электроприводом оказывается канал 7, 11, а резервным - 8, 12.
Рассмотрим поведение системы при возможных отказах ее элементов (фиг.11). Считаем, что рабочим каналом является 7, 11 (фиг.10, в, г). Предположим, что в момент времени t0 (фиг.11в) произошло аварийное отключение РН 7 по причине срабатывания какой-либо из защит (фиг.4) или исчезновения напряжения питания системы импульсно-фазового управления. В этом случае хотя бы на одном из входов блока 9 формируется “0”, что приводит к замыканию контакта 48 (фиг.6б) и принудительному переключению РЭ 5 в положение -А/3 (фиг.11 в). На входе 17 регулятора напряжения 7 (фиг.3) сигнал задания соответствует “0” (или -А/3), что вызывает торможение исполнительного электродвигателя и механизма 11. После этого МР автоматически переходит на поиск работоспособного канала управления. Под действием импульса - А (фиг.11д), сформированным из-за идентичного по знаку выходного напряжения релейных блоков 5, 6 (фиг.11в, г), сигнал на выходе интегратора 3 (фиг.11а) нарастает в положительном направлении до тех пор, пока не будет выполнено условие YИ(t)=+b1 и YИ(t)=+b3. После переориентации РЭ 6 в состояние +А/3 (фиг.11г, момент t2) произойдет подача на вход 18 регулятора 8 сигнала задания и запуск резервного канала 8, 12. На интервале t2-t3 (фиг.11б, г) выходной сигнал блока 15 не успевает достичь нулевого уровня из-за кратковременного срыва автоколебательного режима в РЭ 4, так как частота собственных автоколебаний МР выбирается на уровне нескольких кГц.
Таким образом, в предлагаемой системе управления достигается автоматическое включение резервного электропривода и повышается надежность работы технологической установки в целом. Это обусловлено тем, что блоки 9, 10 обеспечивают “введение” РН 7, 8 в прямой канал замкнутого контура МР по логической функции “И”, характеризующей степень готовности (или аварийного состояния) элементов системы, первоначально находящихся вне этого замкнутого канала регулирования. В результате система приобретает свойства адаптации к отказам или аварийным отключениям каналов 7, 11 и 8, 12 фактически так же, как это происходит в МР (фиг.8). Кратность резервирования может быть повышена за счет увеличения числа релейных элементов МР и каналов идентичных, например, 13, 7, 9, 11.
Предлагаемое устройство используется в комплексе электроприводов технологических механизмов гран-бассейна и системы оборотного цикла водоснабжения шлакоплавильного цеха ОАО “Челябинский трубопрокатный завод. Экономическая эффективность от внедрения регуляторов напряжения для плавного пуска асинхронных электроприводов с рассмотренной системой автоматического резервирования составляет:
- Экономия электроэнергии за счет оптимизации мощности исполнительных электродвигателей
С1=276656 руб.
- Экономия электроэнергии за счет замены парка электродвигателей на новые и их перевод в режим повторно-кратковременных включений
С2=442714 руб.
- Эффективность от снижения потока отказов электроприводов и технологических механизмов, сокращения времени включения резерва
С3=300128 руб.
- Результирующая экономическая эффективность за год
С∑=С1+С2+С3=1019498 руб
Срок окупаемости затрат на реконструкцию электроприводов не превышает 8 месяцев.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ ЭЛЕКТРОПРИВОДОВ ВОДЯНЫХ НАСОСОВ | 2006 |
|
RU2312452C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ ЭЛЕКТРОПРИВОДОВ С ПАРАЛЛЕЛЬНЫМИ КАНАЛАМИ РЕГУЛИРОВАНИЯ | 2014 |
|
RU2565598C1 |
| МНОГОЗОННЫЙ РАЗВЕРТЫВАЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ПЕРЕДАЧИ ЛОГИЧЕСКИХ ДАННЫХ ПО ОДНОПРОВОДНОЙ ЛИНИИ СВЯЗИ | 2001 |
|
RU2206922C2 |
| МНОГОЗОННЫЙ АНАЛОГО-ДИСКРЕТНЫЙ ДАТЧИК ТОКА | 2011 |
|
RU2459249C1 |
| МНОГОЗОННЫЙ ЧАСТОТНО-ШИРОТНО-ИМПУЛЬСНЫЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2009 |
|
RU2408969C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ ЭЛЕКТРОПРИВОДОВ | 2005 |
|
RU2276449C1 |
| ФИЛЬТР С ДИСКРЕТНО ПЕРЕСТРАИВАЕМЫМИ ХАРАКТЕРИСТИКАМИ | 2006 |
|
RU2317636C1 |
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2011 |
|
RU2449470C1 |
| МНОГОЗОННЫЙ РАЗВЕРТЫВАЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ | 2009 |
|
RU2422896C1 |
| МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2471282C1 |









Изобретение относится к области преобразовательной техники и может использоваться при автоматизации технологических процессов для управления группой параллельно работающих асинхронных электроприводов. Техническим результатом является повышение надежности работы системы управления за счет автоматического ввода в работу работоспособного канала регулирования. Система управления группой асинхронных электроприводов водяных насосов содержит сумматоры, интегратор, нечетное число релейных элементов, блок диагностирования на основе последовательно включенных делителя частоты, пропорционально-дифференцирующего звена и демодулятора, блоки функции “Запрет”, тиристорные регуляторы напряжения с фазным регулированием, блоки функции “2И”, исполнительные электродвигателя с водяными насосами. 11 ил.
Система управления группой асинхронных электроприводов водяных насосов, содержащая первый сумматор, выход которого соединен с входом интегратора, выход которого подключен к информационным входам группы из n-го числа релейных элементов, причем n≥ 3 - нечетное число, управляющие входы, содержащиеся у группы из числа n-1 релейных элементов, выходы релейных элементов, подключенные к соответствующим входам второго сумматора, выход которого соединен с первым входом первого сумматора, второй вход которого подключен к источнику сигнала задания, группу из числа n-1 последовательно включенных тиристорного регулятора напряжения, исполнительного электродвигателя и водяного насоса, выход которого соединен с соответствующим входом водяной магистрали, при этом каждый из тиристорных регуляторов содержит информационный вход, выход блока питания системы импульсно-фазового управления и выход блока селективных защит от аварийных режимов работы исполнительного электродвигателя, блок диагностирования, состоящий из последовательно включенных делителя частоты, пропорционально-дифференцирующего звена и демодулятора, причем вход делителя частоты соединен с выходом релейного элемента, несодержащего управляющего входа, а выход демодулятора подключен к выходной клемме блока диагностирования, отличающаяся тем, что, с целью повышения надежности работы системы управления, в нее введены n-1 блоков логической функции “Запрет” и n-1 логических элементов функции “2И”, причем первые входы блоков “Запрет” подключены к выходной клемме блока диагностирования, второй вход каждого из блоков “Запрет” соединен с выходом соответствующего из числа n-1 релейных элементов, а выход блоков “Запрет” подключен к информационному входу соответствующего тиристорного регулятора напряжения, первый вход каждого из элементов “2И” соединен с выходом блока питания системы импульсно-фазового управления соответствующего тиристорного регулятора напряжения, второй вход каждого из элементов “2И” подключен к выходу блока селективных защит соответствующего тиристорного регулятора напряжения, выходы элементов “2И” соединены с управляющими входами соответствующих релейных элементов.
| АВТОМАТИЗИРОВАННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ЗАПРАВКОЙ КРИОГЕННОГО РАЗГОННОГО БЛОКА | 1995 |
|
RU2084011C1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2014723C1 |
| SU 762115 А, 07.09.1980 | |||
| Двухдвигательный электропривод | 1985 |
|
SU1319212A1 |
| Устройство для управления двухдвигательным электроприводом | 1983 |
|
SU1149361A1 |
| Двухдвигательный электропривод | 1987 |
|
SU1494184A1 |
| Двухдвигательный электропривод В.Г.Вохмянина | 1988 |
|
SU1674339A1 |
| БЫСТРОРАЗЪЕМНОЕ СОЕДИНЕНИЕ | 1996 |
|
RU2125189C1 |
| US 5747950 A, 05.05.1998 | |||
| DE 3021879 A1, 25.02.1982 | |||
| Устройство для контроля качества бумажных диффузоров громкоговорителей | 1983 |
|
SU1118917A1 |

