Изобретение относится к устройству для компенсации дисперсии мод поляризации оптического сигнала данных согласно родовому понятию пункта 1 формулы изобретения.
В технике оптической передачи используются каналы передачи на оптических волноводах большой длины. Оптические волноводы, вследствие технологии их изготовления, не являются абсолютно изотропными, а характеризуются слабым двойным лучепреломлением. Ввиду большой длины каналов передачи происходит частотно-зависимое преобразование поляризации, называемое дисперсией мод поляризации (ДМП) или поляризационной дисперсией. Это приводит, вследствие изменения поляризации оптических сигналов в функции оптической частоты и связанных с этим различных зависящих от частоты значений времени прохождения, к расширению передаваемых импульсов, вследствие чего при приеме снижается возможность их распознавания и, следовательно, ограничивается скорость передачи данных.
Проблема усугубляется тем, что, вследствие температурных изменении или механических напряжений, режим передачи канала и тем самым ДМП изменяется. Поэтому используют адаптивные компенсаторы ДМП. которые вводятся в канал передачи. Для управления ими в оптическом приемнике необходимо измерять искажения, связанные с ДМП. Компенсатор можно при этом оптимальным образом отрегулировать, например, с использованием градиентного алгоритма.
Известен полосовой фильтр для фильтрации сигнала данных, для которого необходимо определить ДМП (см. Electronic Letters, 17.02.1994, V.30, 4. pp. 348-349). Детектор мощности на выходе фильтра выдает сигнал, который тем больше, чем меньше искажения, вызванные ДМП.
Недостатком является то, что при наличии большой ДМП первого порядка этот сигнал изменяется в функции дифференциального группового времени задержки (ДГВЗ) не монотонно и поэтому невозможно получить однозначно определенный сигнал.
Известен другой способ, при котором оценивается мощность дифференциального сигнала между выходом решающего блока и входом решающего блока (см. Proceedings OEC 94. 14е-12, pp. 258-259, Makuhari Messe, Japan 1994).
Этот сигнал, однако, обладает более низкой чувствительностью к искажениям, обусловленным ДМП, чем соответствующий полосовой фильтр. Особенно при сильных искажениях, вызванных ДМП, при которых ДГВЗ превышает длительность бита, может быть принято неверное решение, так что полученный сигнал в таких случаях представляет собой непригодный критерий для определения наличия искажений, вызванных ДМП.
Задача изобретения состоит в создании надежного детектора, пригодного и для определения больших значений дифференциального группового времени задержки. Кроме того, задачей изобретения является создание соответствующего устройства для компенсации дисперсии мод поляризации и для оптимальной настройки такого детектора.
Указанная задача решается устройством для компенсации дисперсии мод поляризации согласно пункту 1 формулы изобретения.
В независимом пункте 7 формулы изобретения описан вариант этого решения.
Предпочтительные варианты осуществления изобретения приведены в зависимых пунктах формулы изобретения.
Особое преимущество настоящего изобретения заключается в комбинации монотонно изменяющихся выходных напряжений множества фильтров в используемом основном диапазоне и их большей крутизны, что невозможно достичь при использовании одного единственного полосового фильтра или одного единственного фильтра нижних частот. Вследствие этого возможна существенно более точная компенсация.
Применение полосовых фильтров имеет, по сравнению с применением фильтров нижних частот, преимущество большей крутизны характеристики выходных напряжений фильтров, по сравнению с функцией существующего дифференциального группового времени задержки. Тем самым можно осуществить более точную и быструю компенсацию.
Вместо множества полосовых фильтров или фильтров нижних частот можно также использовать переключаемый/управляемый полосовой фильтр или переключаемый/управляемый фильтр нижних частот.
Устройство компенсации может быть дополнено другими критериями управления. Особенно предпочтительными являются устройства, которые оценивают требуемым образом сформированные частоты ошибок вспомогательного сигнала данных, который получают из принятого оптического сигнала. Особенно простая схема может быть реализована посредством регулируемого порога дискретизации при оценке сигнала данных.
Примеры выполнения изобретения описаны ниже со ссылками на чертежи, на которых представлено следующее.
Фиг.1 - нормированная характеристика выходных напряжений фильтров.
Фиг.2 - пример осуществления изобретения с тремя полосовыми фильтрами.
Фиг.3 - другой пример осуществления с одним управляемым полосовым фильтром.
Фиг. 4 - еще один пример выполнения с дополнительной оценкой вспомогательного сигнала данных.
Фиг.5 - другой вариант этого примера выполнения.
На фиг. 1 представлена нормированная характеристика выходных напряжений от U1 до U3 трех полосовых фильтров, средние частоты которых составляют 0,125/Т, 0,25/Т и 0,5/Т, где Т - длительность бита передаваемого сигнала данных. Кроме того, на графике показано выходное напряжение U (ФНЧ) фильтра нижних частот с граничной частотой 0,125/Т в зависимости от нормированного дифференциального группового времени задержки ДГВЗ/Т при возбуждении обоих основных поляризаций равного уровня. (В качестве основных состоянии поляризации (ОСП) далее обозначены те ортогональные друг другу две поляризации, которые при изменении оптической частоты в первом приближении не изменяются. В сохраняющих поляризацию оптических волноводах основные состояния поляризации совпадают с основными осями, то есть являются горизонтальными и вертикальными. В общем случае основными состояниями поляризации являются любые ортогональные пары состояний эллиптической поляризации. Основные состояния поляризации обладают различающимися групповыми временами задержки, разность которых далее определяется как "дифференциальное групповое время задержки" - ДГВЗ. Если передается оптический сигнал с основной поляризацией, то в приближении первого порядка не происходит расширения импульса. Если он передается с поляризацией, которая при разложении на обе основные поляризации соответствует равным составляющим мощности, то имеет место максимальное расширение импульса, потому что два равных по величине импульса перекрываются с разницей во времени распространения, равной ДГВЗ.
Если основные поляризации изменяются в функции оптической частоты, то при применении на входе основной поляризации, которая соответствует определенной частоте, выходная поляризация изменяется как функция частоты, но даже более высокого порядка, чем первый порядок. Это явление определяется как дисперсия мод поляризации (ДМП) более высокого порядка. В общем случае проявляется ДМП более высокого порядка, но при этом влияние ДМП первого порядка является преобладающим, и поэтому она предпочтительным образом должна компенсироваться.)
Очевидно, что выходной сигнал U3 обеспечивает безошибочное определение ДМП только до определенного значения ДГВЗ, равного 1Т, так как для значений между 1Т и 2T крутизна функции меняет знак. Соответствующий вывод справедлив для выходных напряжений других полосовых фильтров и в меньшей степени - также для выходных напряжений фильтров нижних частот.
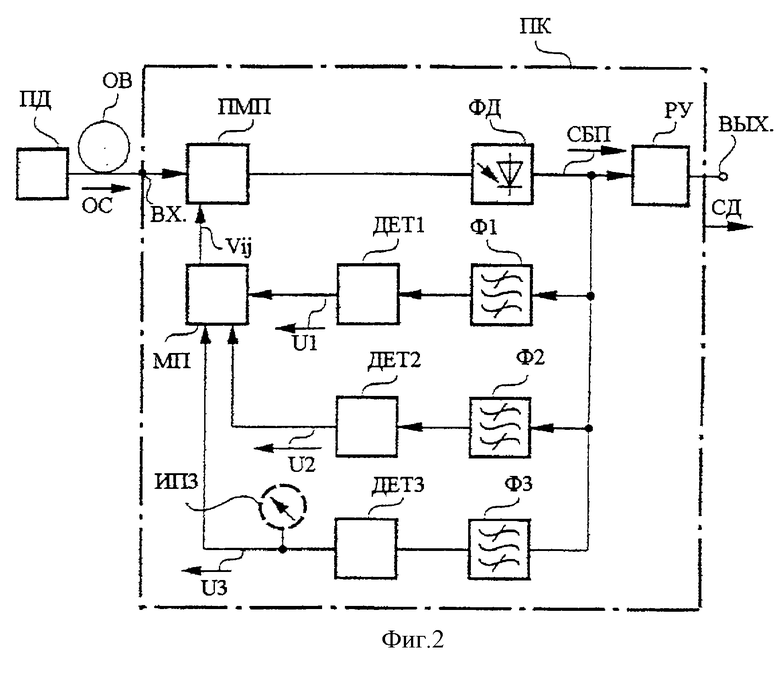
На фиг.2 представлено применение устройства для определения ДМП в компенсаторе. Оптический передатчик ПД передает оптический сигнал ОС по оптическому волноводу ОВ к оптическому приемнику ПК. Последний содержит фотодиод ФД для преобразования оптического сигнала в электрический сигнал. Включенное далее решающее устройство РУ выдает на выход ВЫХ передаваемый сигнал данных СД.
Перед фотодиодом включен преобразователь мод поляризации (ПМП) для компенсации дисперсии мод поляризации, вход ВХ которого соответствует входу приемника.
Критерий регулирования для трансформатора мод поляризации ТМП получают из сигнала базовой полосы СБП с выхода фотодиода. Этот сигнал подается на множество фильтров Ф1-Ф3, на выходах которых включены соответственно измерители мощности ДЕТ1-ДЕТ3. За счет использования конденсаторов сглаживания или иных подобных устройств эти измерители мощности также реализуют функцию сглаживания или функцию фильтра нижних частот. Полосовые фильтры предпочтительно имеют центральные частоты, равные 0,125/Т, 0,25/Т и 0,5/Т. Значения ширины полосы составляют от 0,0001-кратного до 0,2-кратного значения соответствующей центральной частоты. При малой ширине полосы полосового фильтра в процессе измерения мощности в измерителях мощности ДЕТ1-ДЕТ3 но существу можно отказаться от сглаживания. Дополнительные детали, такие как усилители, по причинам наглядности чертежа не показаны.
Чтобы наглядно пояснить настройку компенсаторов, лучше всего исходить из того, что первоначально имеет место большое значение дифференциального группового времени задержки. Сначала для оптимизации настройки компенсатора применяется выходное напряжение U1 полосового фильтра Ф1 (измеряемое измерителем мощности) с самой низкой центральной частотой 0,125/Т с выхода, используемого в качестве регулятора микропроцессора МП (с аналого-цифровым (АЦ) и цифроаналоговым (ЦА) преобразователем). Как только этот сигнал переходит через пороговое значение SO, для оптимизации начинает применяться выходной сигнал полосового фильтра Ф2 со следующей по величине центральной частотой 0,25/Т. Как только этот фильтр выдаст мощный выходной сигнал, превысивший упомянутое пороговое значение (или другое пороговое значение, выбранное в соответствии с данным вариантом выполнения устройства), осуществляют переключение на полосовой фильтр с наивысшей центральной частотой 0,5/Т. Хотя этот фильтр имеет самую малую область монотонности выходного сигнала, однако посредством совместной оценки выходных сигналов других полосовых фильтров гарантируется то, что выходные сигналы вырабатываются в первой области монотонности 0≤ДГВЗ≤Т. Поэтому ее очень высокую чувствительность к компенсации искажений, обусловленных ДМП, можно использовать особенно выгодным образом. Используемые области монотонности представлены на фиг.1 в виде основных значений.
Чтобы достичь оптимального значения ошибок в битах, можно также использовать нелинейную или линейную комбинацию выходных сигналов полосовых фильтров или соответственно выходных сигналов включенных за ними измерителей (детекторов) мощности. Для этого вместо сигнала фильтра. выбранного в качестве функции выходных сигналов более низкочастотных полосовых фильтров, совместно используют выходной сигнал или выходные сигналы, являющиеся более низкочастотными, а именно: пока выходной сигнал измерителя мощности ДЕТ1 не превысил свой порог, применяется только этот сигнал. Если порог превышен, то добавляется также выходной сигнал измерителя мощности ДЕТ2. Если, наконец, и этот порог превышен, то добавляется выходной сигнал измерителя мощности ДЕТ3.
Для целей измерений на выходах детекторов ДЕТ1-ДЕТ3 могут непосредственно подключаться измерительные приборы, из которых на фиг.2 показан один - ИПЗ.
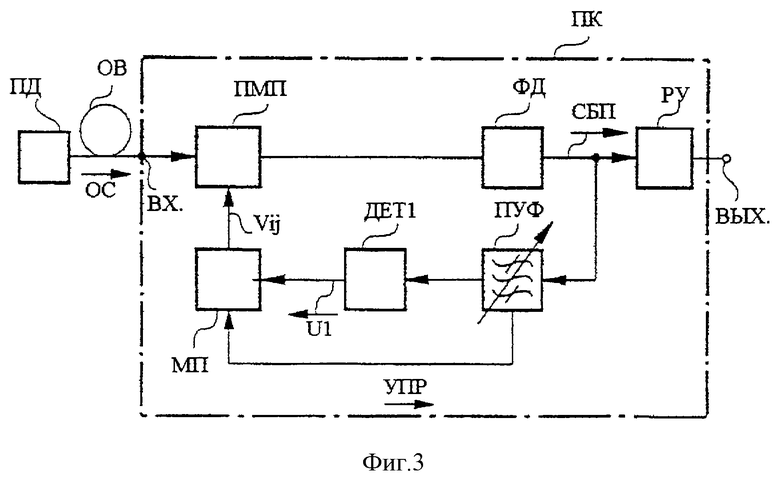
На фиг. 3 представлен вариант заявленного устройства компенсации, в котором три полосовых фильтра заменены одним единственным переключаемым/управляемым полосовым фильтром ПУФ. Функционирование компенсатора остается тем же самым. Используемый в качестве регулятора микропроцессор МП запоминает соответствующие предыдущие выходные напряжения, так что обеспечивается возможность однозначного соотнесения основных значений (области монотонности) фильтра с более высокими центральными частотами. Регулировка фильтра обеспечивается с помощью управляющего сигнала УПР.
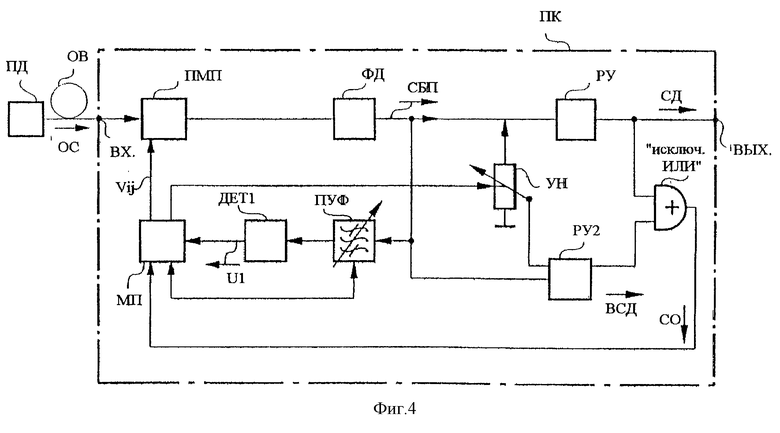
На фиг.4 представлен еще один вариант заявленного устройства, в котором применяется второе решающее устройство РУ2, на которое также подается сигнал базовой полосы СБП. В этом варианте осуществления порог данного решающего устройства регулируется с помощью устройства настройки УН в таком диапазоне, что это решающее устройство уже выдает вспомогательный сигнал данных ВСД, когда первое решающее устройство РУ еще вырабатывает сигнал данных СД, по существу не имеющий ошибок. Выходные сигналы сравниваются в логической схеме "ИСКЛЮЧАЮЩЕЕ ИЛИ", и полученный таким образом сигнал ошибки СО также используется микропроцессором МП для управления преобразователем мод поляризации ПМП. За счет сдвига порога второго решающего устройства постоянно вырабатывается мера того, насколько удовлетворительно качество сигнала с учетом достижимого значения ошибок в битах. Чем меньше частота ошибок вспомогательного сигнала данных при сдвиге порога относительно оптимального значения, тем лучше качество сигнала. В первом приближении максимальное выходное напряжение переключаемого/управляемого фильтра ПУФ и минимальная частота ошибок согласуются друг с другом. Более точная оценка, которая приводит к более низкой частоте ошибок в битах решающего устройства РУ, получается, в противоположность этому, при применении сигнала ошибки СО. Так как имеют место стохастические отклонения вспомогательного сигнала данных ВСД относительно сигнала данных СД, то требуется относительно большое время измерения или определения сигнала ошибки СО, чтобы получить хорошее отношение сигнал/шум и тем самым оптимальную компенсацию. Полученная с помощью второго решающего устройства дополнительная информация используется для того, чтобы оптимизировать фильтр ПУФ, т.е. изменять его передаточную характеристику. Этот адаптивный режим работы представляется особенно благоприятным с учетом технологических допусков температурных колебаний, проявления нелинейных эффектов и т.д. Большое преимущество этой формы выполнения состоит в том, что с помощью выходного сигнала фильтра уже возможна быстрая компенсация, и для точной настройки и изменения передаточной функции фильтра остается достаточно времени.
Особенно в случаях, когда нельзя рассчитывать на быструю настройку преобразователя мод поляризации ПМП, возможно, однако, применение только сигнала ошибки СО, так что показанные на фиг.4 фильтр ПУФ и измеритель мощности (детектор) ДЕТ1 могут быть опущены.
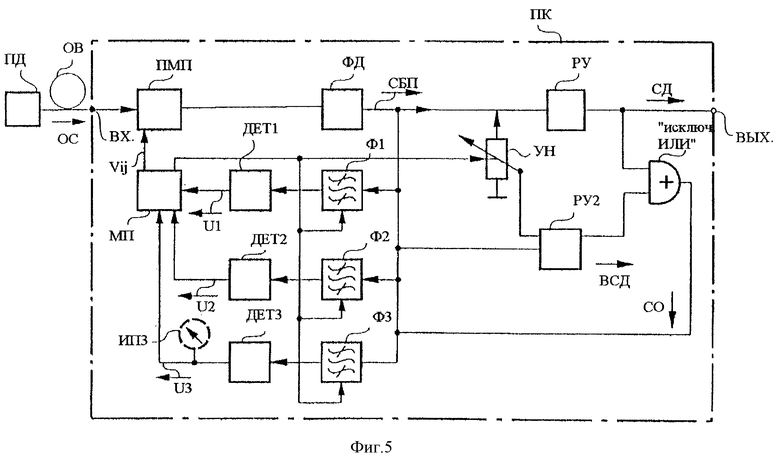
При применении множества полосовых фильтров, как показано на фиг.5, передаточные функции фильтров или веса отдельных выходных сигналов фильтров можно изменять таким образом, чтобы проявлялись минимальные искажения, связанные с дисперсией мод поляризации. Так как это может осуществляться медленно, в то время как выходные сигналы фильтров и их комбинации предоставляются в распоряжение быстро, эта адаптивная форма выполнения обеспечивает те же преимущества, что и пример осуществления по фиг.4.
В принципе управление преобразователем мод поляризации может осуществляться и с использованием сигнала ошибки.
Изобретение относится к устройству для компенсации мод поляризации. Технический результат заключается в повышении надежности детектора, пригодного для определения больших значений дифференциального группового времени задержки. Устройство содержит преобразователь мод поляризации (ПМП), фотодиод (ФД), первое решающее устройство (РУ), полосовой фильтры или фильтры нижних частот (Ф) (1, 2, 3), измеритель мощности (1, 2, 3), регулятор (МП). Также в другом варианте используется один Ф с переключаемой или настраиваемой граничной частотой или центральной частотой Ф. Предусмотрено также второе РУ, который выдет вспомогательный сигнал данных. Выходные сигналы первого и второго РУ сравниваются для получения сигнала ошибки, который используется регулятором (МП) для управления ПМП. 2 с. и 8 з.п. ф-лы, 5 ил.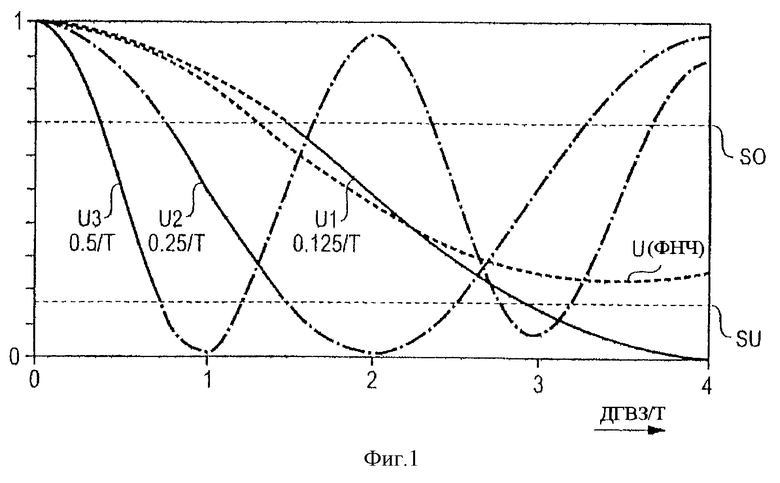
| US 5473457 А, 05.12.1995 | |||
| US 4466133, 14.08.1984 | |||
| Ретранслятор цифрового оптического сигнала | 1981 |
|
SU1046951A1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| ИНГАЛЯТОР | 2019 |
|
RU2758029C1 |

